
EV
ALUATION OF VISUALIZATION FEATURES IN
THREE-DIMENSIONAL LOCATION-BASED MOBILE SERVICES
M
´
ario Freitas
1
, A. Augusto Sousa
1,2
and Ant
´
onio Coelho
1,2
1
FEUP, Rua Dr. Roberto Frias, s/n 4200-465 Porto, Portugal
2
INESC Porto, Campus da FEUP, Rua Dr. Roberto Frias, s/n 4200-465 Porto, Portugal
Keywords:
Computer graphics, Visualisation paradigms, Location-based mobile services, Visual perception, Navigation
systems, Mobile 3D city maps, User interaction.
Abstract:
Nowadays, there is a wide range of commercial LBMS (Location-Based Mobile Services) available in the
market, mainly in the form of GPS-based navigation solutions, and a trend towards the display of 3D maps
can be clearly observed. Given the complete disparity of ideas and a visible commercial orientation in the
industry, the study of the visualisation aspects that influence user performance and experience in the explo-
ration of urban environments using 3D maps becomes an important issue. In this work, a generic conceptual
framework is proposed whose main purpose is to objectively evaluate the impact and contribution of the major
visualisation elements involved (henceforth mentioned as feature vectors). With this framework in mind, an
online questionnaire was developed and administered to 149 test subjects in order to measure the real impact of
feature vectors. The results clearly demonstrated that certain features have clear impact on user performance,
and should be taken in account in LBMS development. As an example, just by displaying buildings with a
3D appearance, subjects were able to match more accurately the real environment with the one presented on a
mobile device. In general, users were able to perform the tasks entrusted to them faster, if they were provided
more realistic imagery.
1 INTRODUCTION
The LBMS technology, namely in the form of GPS-
based navigation systems, has just recently reached a
state of technological maturity, enabling the develop-
ment of 3D map-based graphical interfaces. Nowa-
days, there is a wide offer of LBMS solutions in the
market, especially in the form of automotive navi-
gation systems. Motivated by commercial interests,
many of these products promise to offer the “best vi-
sualisation experience ever”, in search for a differ-
entiating factor from the competition. By looking at
the variety of visualisation paradigms being proposed,
one can clearly notice a great disparity of ideas with-
out a clear notion of its usefulness.
Provided the non-existence of an objective state-
of-the-art generalising theory capable of unifying and
evaluating all the visualisation elements and proper-
ties, the main motivation of this work is to study the
most relevant of these features and how to adjust them
appropriately, in order to maximise the usability of
mobile maps and to improve the navigation experi-
ence, in accordance with the following objectives:
1. Elicit and assess the state-of-the-art contributions
on visualisation paradigms of 3D maps, with par-
ticular interest on mobile services and devices;
2. Develop a methodology for evaluating the differ-
ent issues that influence user experience and per-
formance when exploring an urban environment
with mobile maps.
2 STATE OF THE ART
2.1 Visual Perception of Realism
The variety of free and commercial products featuring
three-dimensional map-based mobile services avail-
able to the masses, usually ranges from very abstract
to reasonably realistic and immersive visualisation
paradigms. However, there is a common misconcep-
tion on what is Image Realism, how is it visually per-
ceived, and how can it be effectively measured.
In (Rademacher et al., 2001), a scientific exper-
iment was conducted to understand what aspects of
328
Freitas M., de Sousa A. and Coelho A.
EVALUATION OF VISUALIZATION FEATURES IN THREE-DIMENSIONAL LOCATION-BASED MOBILE SERVICES.
DOI: 10.5220/0001805903280336
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-67-8
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
an image can make it look “real” or “not real”, i.e.,
whether it is perceptually indistinguishable or not
from the corresponding photographs. The results
showed that subjects were not convinced by the in-
creasing number of light sources and shadows nor the
variety or number of shapes. The same could be said
for “perfectly sharp” shadows or “perfectly polished”
surfaces.
In (Lange and Ch, 2003), an experiment was car-
ried out with 75 test subjects to classify 90 images of
the virtual landscape of Brunnen / Schwyz (Switzer-
land) from three different viewpoints in a degree of
realism from 1 (very low) to 5 (very high). The
results generally demonstrated that the variable that
most contributed to the sense of realism was – by far
– the high-resolution orthophotographic imagery, and
the second most important being texture-mapping.
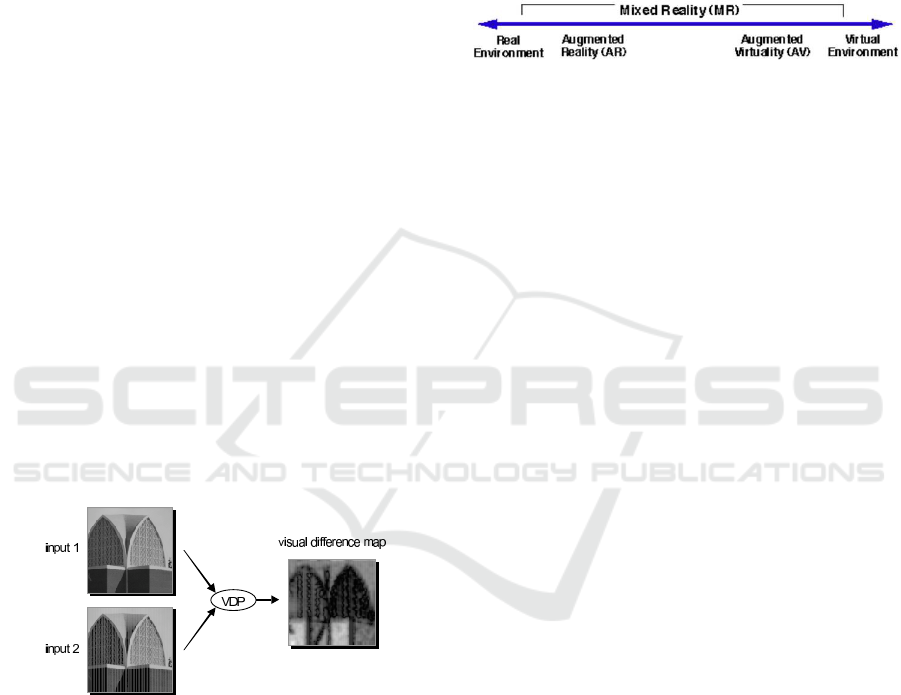
In other works like (McNamara et al., 2000), the
importance of perception-based image quality metrics
is studied, such as the ones given by the VDP (Visible
Differences Predictor) and the VDM (Visual Discrim-
ination Metric). These two metrics aim to analytically
predict the differences between a computer-generated
image and the photograph it depicts, taking into ac-
count the limitations of the human eye described by
the HVS (Human Visual System). The VDP quality
metric takes the two images as input and generates a
difference map that predicts the probability of the hu-
man eye finding differences between the two pictures,
as demonstrated in (Bolin and Meyer, 1999) (see Fig-
ure 1).
Figure 1: Difference map in the VDP quality metric (ob-
tained from the previously mentioned work).
A simplification of the VDM quality metric was
provided by following a similar approach (Bolin and
Meyer, 1999): instead of finding a difference map, a
just noticeable difference map was proposed which
corresponds to a 75% probability of a person detect-
ing a difference between the two images (McNamara
et al., 2000).
Because of some controversy and no agreed-
upon standards for measuring realism in computer-
generated imagery, a conceptual framework for mea-
suring image realism and evaluating its usefulness
was proposed in (Ferwerda, 2003). The frame-
work distinguishes three different varieties of real-
ism: physical realism, photo-realism and functional
realism. However, this framework does not seem to
be enough to encompass the extents to which real-
ity or virtuality can be “augmented”. Accounting for
such circumstances, the concept of Virtuality Contin-
uum was introduced in (Milgram and Kishino, 1994)
as represented in Figure 2.
Figure 2: The Virtuality Continuum (obtained from the pre-
viously mentioned work).
At the left end, we have the “completely real”
Real Environment, which is made up of “real” objects:
“any objects that have an actual objective existence”.
At the right end, we have the “completely computer-
simulated” Virtual Environment, which is made up of
“virtual” objects: “objects that exist in essence or ef-
fect, but not formally or actually”.
2.2 User Tasks
The underlying basic equation that can help us find
the “perfect” balance in map-based mobile services is
what could be called of Mobility Equation. This equa-
tion was first formulated by Leonard and Durrant-
Whyte for mobile robot navigation (Borenstein et al.,
1996) but can be equally extended to human naviga-
tion. The equation is made up of the following three
questions:
• ‘Where am I?’
• ‘Where am I going?’
• ‘How do I get there?’
In (Hunolstein and Zipf, 2003), the tasks are clas-
sified into 4 different groups of high-level user tasks
that have a strong relationship with these questions,
as described in table 1.
2.3 Location-based Mobile Services
In this work we have analysed and studied several
state-of-the-art contributions on LBMS which pro-
vide a wide variety of visualisation paradigms, in or-
der to understand the current tendencies in the indus-
try and to formulate hypothesis regarding their valid-
ity and usefulness. The contributions range from pilot
studies to commercial products, within the scope of
road and pedestrian maps, as follows: TellMaris, m-
LOMA, LAMP3D, TomTom, Navigon, NDrive, iGO,
Google Earth, INSTAR, Virtual Cable
TM
, and Enkin.
EVALUATION OF VISUALIZATION FEATURES IN THREE-DIMENSIONAL LOCATION-BASED MOBILE
SERVICES
329
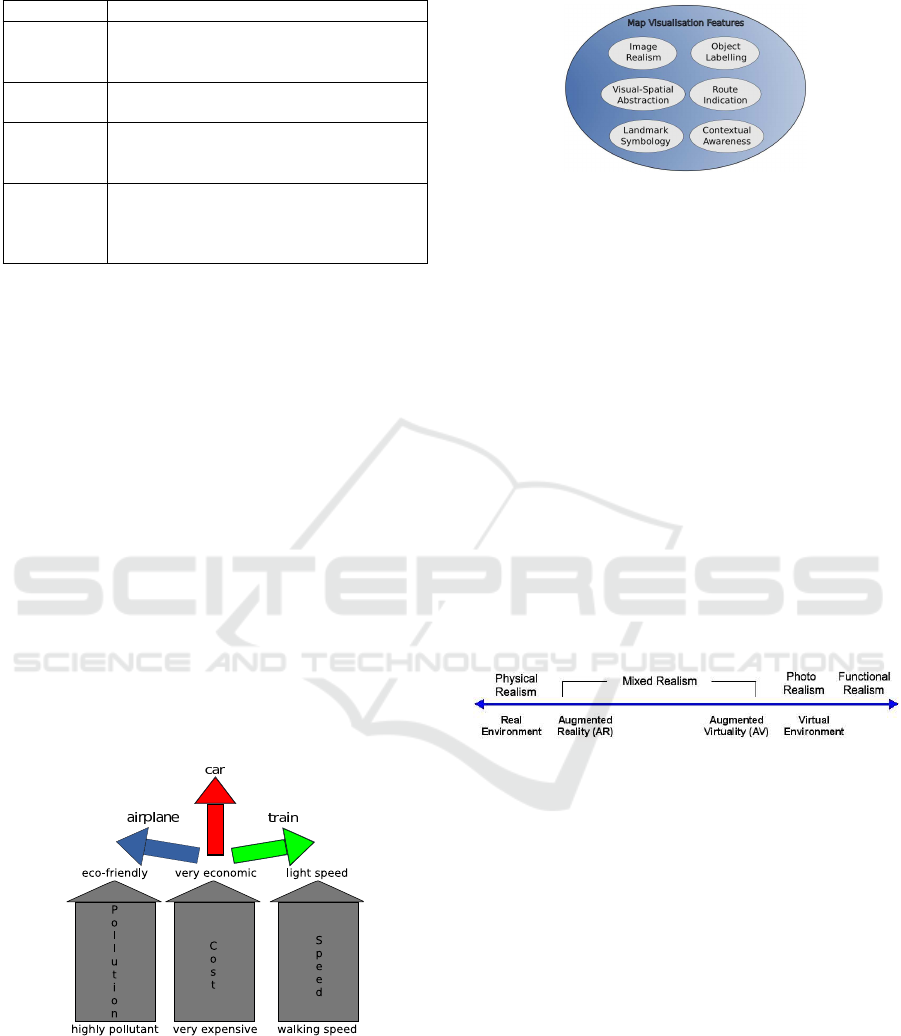
Table 1: The primary tasks that 3D maps are used for.
Task Description
Locator Identification of the user’s own position
and other objects. Answers ‘Where am
I?’ questions.
Proximity Inform the users of nearby facilities. Im-
plied by ‘Where am I going?’ questions.
Navigation The most tangible example is routing
from one location to another. Answers
‘How do I get there?’ questions.
Event Time/Location dependent objects, allow-
ing the users to know what is happen-
ing and when/where. Answers ‘And now
what?’ questions.
3 CONCEPTUAL FRAMEWORK
In this section, a generic evaluation framework is pro-
posed which can be used as the main methodology for
the specification, development and evaluation of new
or existing solutions in the visualisation problem do-
main. This framework is proposed in order to simplify
the evaluation process to the most relevant features,
to the detriment of other classical analysis methods
that can be used to obtain a more thorough evaluation.
This framework defines the concept of feature vectors
comprising orientations and magnitudes. The orien-
tation defines the idea or concept the visualisation
paradigm represents, and magnitude the degree/level
to which the paradigm “amplifies” the vector. An ex-
ample can be seen in Figure 3 to describe a possible
feature vector for transportation. An orientation of
this feature vector is the mode of transport, while pol-
lution, cost and speed are magnitudes.
Figure 3: A possible feature vector for “Transportation”.
The framework is composed by six feature vectors
as shown in Figure 4 and described below. These fea-
ture vectors are not intended to characterise the com-
plete set of visualisation features, but the most rele-
vant ones observed from the current state of the art
described in section 2.3.
Figure 4: Evaluation Framework through feature vectors.
3.1 Image Realism
Image Realism is the feature vector that is concerned
with how real, i.e., free from any idealisations or
abstractions, is the image of the map presented to
the user. Taken into account what was previously
mentioned on this matter (see Section 2.1), the sug-
gested magnitudes for this vector will be based on the
framework proposed in (Ferwerda, 2003) and the con-
cepts on virtuality continuum defined in (Milgram and
Kishino, 1994), with a few modifications. Firstly, a
“relaxed” version of physical realism will be adopted,
i.e., it is assumed that current displays are consid-
ered perfect in the sense that they can emit the ac-
tual energy we want them to reproduce. Secondly,
this framework will be incorporated into the virtuality
continuum as illustrated in Figure 5, adapted from the
above work.
Figure 5: An illustration of the proposed framework com-
bining the Virtuality Continuum spectrum with varieties
of image realism (adapted from the previously mentioned
work).
Photo-Realism is located to the left of Functional
Realism, not because it is considered “less virtual”
than Functional Realism but because it is closer to the
Physical Realism, and consequently providing a more
“realistic” environment.
In terms of orientations, this vector includes the
visualisation elements that represent the real world
visual information, namely 3D Buildings (city build-
ings, landmarks), Map Vectors (roads and polygons),
and Surface Model (ground surface elevations).
3.2 Object Labelling
Object Labelling encompasses the kind of visual tech-
niques and strategies that are followed to label map
elements such as rivers, streets, cities, and so on.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
330

In (Been et al., 2006) and other studies, the impor-
tance of two types of labelling, namely static labelling
and dynamic labelling, is discussed. This is relevant
to distinguish since, depending on the case, we might
be dealing with dynamic maps, i.e., maps that support
continuous zoom (changing the scale) and continuous
panning (usually by dragging the map). Based on the
framework proposed in the previous study, the mag-
nitudes for this vector will include the concepts of
Static/Dynamic Selection (visibility) and Placement
(size, position and orientation) of labels.
One of the possible approaches when labelling ob-
jects is to project the labels oriented towards the cur-
rent perspective, analogous to a billboard in Computer
Graphics. This approach is followed by all the con-
tributions except Google Earth where labels are flat-
tened and laid down on the maps surface.
Based on the works of (Wolff, 1999; van Dijk
et al., 1999) and the previous discussion on adaptive-
ness to the current perspective, the proposed orien-
tations for Object Labelling are Perspective-Adaptive
(oriented towards the current perspective), Point Posi-
tioning (point symbols), Line Positioning (polygonal
chains, such as rivers), Area Positioning (areal fea-
tures such as countries), and General Positioning (a
combination of the three previous methods).
3.3 Visual-Spatial Abstraction
Visual-Spatial Abstraction measures the complexity
of mental operations that are required to perform the
visual matching of the real environment that can be
observed and the one on the screen. This vector is
specifically focused on the mental viewing transfor-
mation that is required in order to have a perfect cor-
respondence between both images: the reality and
the screen. The proposed orientations for this vector
are presented, regardless of the elevation angle of the
“camera”, namely Ground Level (when it is only pos-
sible to observe the current street and its junctions),
Local-Area Level (when streets that may not even be
part of the route can be observed), and Wide-Area
Level (when municipalities and an overview of the
route are visible). The proposed magnitudes reflect
the adaptiveness of the camera to the users’ behaviour.
We define Adaptive Level and Adaptive Orientation
when the camera adapts to the user’s movement (ac-
cording to some variable like speed), and whether it
adapts to his looking direction, respectively.
3.4 Route Indication
Route Indication provides a classification of the visual
techniques and strategies for showing the itinerary
path in the road maps, and the kind of manoeuvre in-
dicators or way points that are presented in the dis-
play. The proposed orientations for this vector, can
be regarded as the visual indicators that are gener-
ally used by the majority of the contributions to dis-
play the route, namely Arrows, Cords, Way Points and
Carpet-like shapes to indicate the route. These in-
dicators can be used with different “immersion” lev-
els which are considered the proposed magnitudes for
Route Indication, namely Instructive (when indicators
are merely instructive) and Simulative (when they re-
semble real world indicators).
3.5 Landmark Symbology
Landmark Symbology evaluates the cartographic sym-
bology that is used to portray the world using a pic-
torial language, represented by “map symbols”, often
accompanied by a legend. This vector is also related
to Image Realism, in the way that both should be com-
plementary, i.e., excessive realism may distract the
users, but a great lack of symbology may completely
blur their sense of orientation.
New concepts and design guidelines for the carto-
graphic visualisation of landmarks in mobile maps are
proposed in (Elias et al., 2005). Based on these con-
cepts, the orientations for this vector will reflect the
kind of buildings represented by symbols, specifically
Shops referenced by name (e.g., KFC, McDonalds),
Shops referenced by type (e.g., hotel, pharmacy),
Buildings with unique name / function (e.g., Tokyo
Tower, Statue of Liberty), and Buildings with unique
visual properties (e.g., “the large yellow house”). Ad-
ditionally, the first proposed magnitude for this vec-
tor will define in itself, the concept of levels of ab-
stractions for landmarks, according to a scale (from
the most abstract, to the most concrete): Words, Sign,
Icon, Sketch, Drawing, and Image, as defined in the
previous study.
There are other parameters that influence the de-
cision of whether an abstraction level should be used
in a mobile map for a given situation. For in-
stance, some cartographic generalisation procedures
(like scaling down a landmark object to an appropri-
ate size suited for its representation in a map) might
raise some problems such as congestion, coalescence,
and imperceptibility (Elias et al., 2005). To account
for these restrictions, the proposed magnitudes con-
sist of Adaptive Zoom and Adaptive Complexity, re-
spectively, whether the abstraction level of landmarks
adapts to the current zoom level, and whether they
change with the varying complexity of features.
EVALUATION OF VISUALIZATION FEATURES IN THREE-DIMENSIONAL LOCATION-BASED MOBILE
SERVICES
331

3.6 Contextual Awareness
Contextual Awareness measures the extent to which
a visualisation paradigm is applied to get additional
information on a contextual or situational basis.
It is important to distinguish the three groups of
application areas in which virtual urban environments
can be valuable, according to the spatio-temporal na-
ture. These groups constitute the proposed orienta-
tions for this vector, depending on whether they focus
on the past, present or fiction, according to (Coelho,
2006): Reconstructional (reconstruction of urban en-
vironments that were totally or partially lost), Recre-
ational (urban design, urban planning, etc.), and Fic-
tional (creation of imaginary realities).
Levels of awareness regarding the current loca-
tion, time, and situation can vary from contribution
to contribution. In (Burigat and Chittaro, 2005), it is
claimed that a passive contextual-awareness approach
is generally more flexible than an active approach. In
the latter case, if the user is constantly presented with
unwanted information it can become “too obtrusive”.
Contrarily, in most automotive navigation systems,
direction instructions or location-based information
such as nearby points of interest are automatically
presented, i.e., without the need of the user’s interven-
tion. For these reasons, the proposed magnitudes for
this vector will reflect the different autonomy levels
of “contextual awareness” an application can demon-
strate in different contexts and tasks, as previously
denoted by (Chen and Kotz, 2000), specifically Ac-
tive Awareness (without the need of user interven-
tion), and Passive Awareness (when the user shows
interest for getting context-based information).
Table 2 summarises the evaluation framework, ac-
cording to the proposed magnitudes and orientations.
4 METHODOLOGY
An interactive online questionnaire was developed
and several hypothesises were formulated, in order
to assess the real impact of each visualisation feature
described in the conceptual framework. Since avail-
able free online questionnaires are generally limited
to allow users to set their preferences, an interactive
online questionnaire was developed specifically for
this study, enabling the measuring of time for each
answer and a more adequate visual aspect definition.
However, due to the intrinsic limitations of the pro-
posed questionnaire, and in order not to make it per-
ceived by potential participants as “too exhaustive”,
only the features for which there are no significant
indications from the state-of-the-art (regarding their
impact and relevance) were evaluated with the ques-
tionnaire. Moreover, there are some components that
were not possible to evaluate, and therefore were not
included in this study, given the limitations imposed
by this kind of questionnaire.
The questionnaire was divided into 3 parts. In
the first part, the exercises were mainly based on the
pointing task paradigm as previously performed in
other studies (Nurminen, 2006). In the second part,
a similar approach was followed, but instead of eval-
uating the matching of the two realities, the main ob-
jective was to measure how well users perform a given
task (see Section 2.2). In the last part, users were
asked about their preferences regarding the visualisa-
tion of map elements such as landmarks.
4.1 Image Realism
All Image Realism orientations were tested along
with the various degrees of magnitudes, in accordance
with the vector instances (orientations and magni-
tudes combined) found in the state-of-the-art contri-
butions. These instances were considered eligible for
the evaluation through the questionnaire, since there
are few or no indications, with regards to their impact:
• Simple Textured Buildings and Photo Textured
Buildings
• Coloured Map and Orthophotomap
• Flat Model and Terrain Model
It was hypothesised that, in the absence of Sim-
ple Textured Buildings, test subjects will have to rely
on their ability to match the 3D geometry of the real
building with the geometry of the 2D polygon repre-
sentation on the map. At the same time, it is supposed
that by providing the three-dimensional (yet simple)
geometry of the whole building, in the presence of
this component, test subjects will make fewer mis-
takes and, as a consequence, will require less time
matching both realities (see Figure 6).
Figure 6: The 2 images supporting the questions that evalu-
ate the impact of Simple Textured Buildings.
In the case of the Photo Textured Buildings com-
ponent (see Figure 7), it was hypothesised that, by
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
332
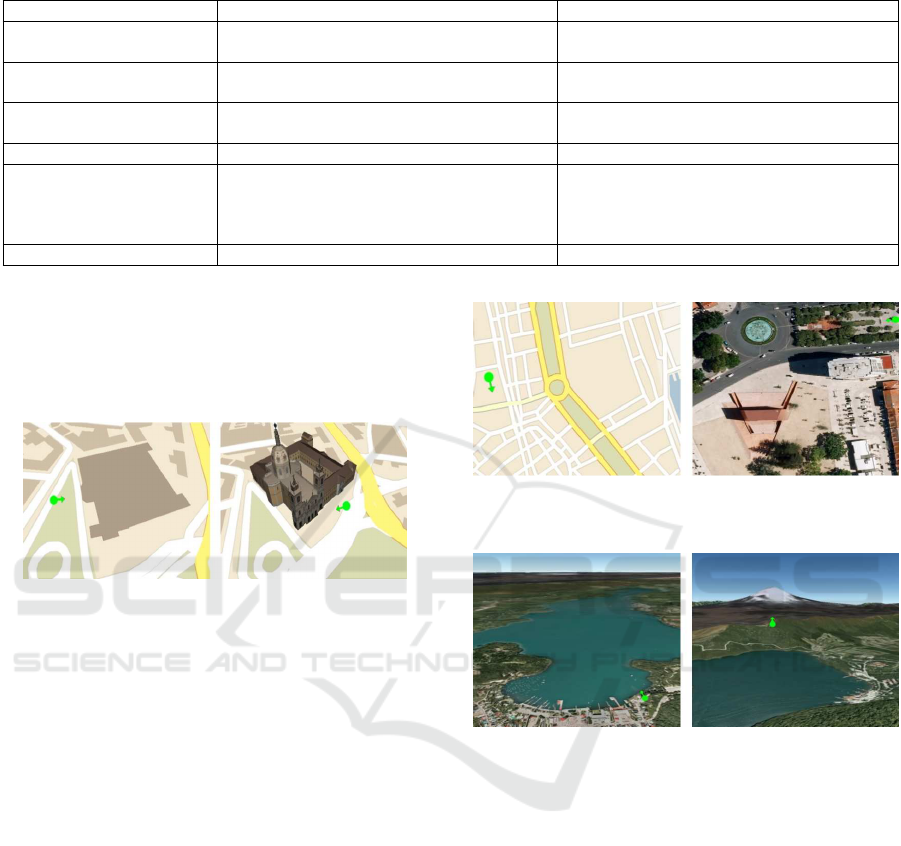
Table 2: Structure of the proposed evaluation framework.
Feature Vector Orientations Magnitudes
Image Realism 3D Buildings, Map Vectors, Surface Model Physical Realism, Mixed Realism, Photo-
Realism, Functional Realism
Object Labelling Perspective-Adaptive, Positioning (Point,
Line, Area, General)
Static / Dynamic Selection / Placement
Visual-Spatial Abstraction Ground Level, Local-Area Level, Wide-
Area Level
Adaptive Level, Adaptive Orientation
Route Indication Arrows, Cords, Way points, Carpet Instructive, Simulative
Landmark Symbology Shops (referenced by name), Shops (ref-
erenced by type), Buildings (with unique
name / function), Buildings (with unique vi-
sual properties)
Abstractness (Words, Sign, Icon, Sketch,
Drawing, Image), Adaptive Zoom, Adaptive
Complexity
Contextual Awareness Reconstructional, Recreational, Fictional Active Awareness, Passive Awareness
simultaneously providing the 3D geometry of a build-
ing along with photographic fac¸ades, test subjects
will be able to detect features (e.g. windows, doors,
unique wall patterns, etc.) more accurately and faster
than in the case of Simple Textured Buildings.
Figure 7: The 2 images supporting the questions that evalu-
ate the impact of Photo Textured Buildings.
Regarding Map Vectors, it is assumed that an Or-
thophotomap can provide subjects a much more en-
riching visualisation experience than the one provided
by a Coloured Map (see Figure 8). The hypothesis
rests on the belief that an Orthophotomap component
can make easier for users to discern the true features
of the map’s surface, by giving a realistic view rather
than a rough generalisation. There are many situa-
tions were coloured vector polygons are not enough
to represent features like a tiled pavement; a group of
trees arranged in a special and unique way; and sev-
eral “static” features like public benches, zebra cross-
ings, and many others that are impossible to find in a
coloured vector map.
Regarding the Surface Model, it was hypothesised
that by using a Terrain Model rather than a Flat Model
component, users will be able to perform the spa-
tial matching of both reality and virtuality in a much
more immersive and natural way (see Figure 9). It
is expected that by providing the Terrain Model com-
ponent, users will be able to use elevated reference
points, and to understand and visualise occlusions
caused by the varying landscape elevation.
In the end, it is expected that users will be able to
perform their tasks in less time, since they just need to
Figure 8: The 2 images supporting the questions that evalu-
ate the impact of Coloured Map and Orthophotomap.
Figure 9: The 2 images supporting the questions that evalu-
ate the impact of Flat Model and Terrain Model.
think “outside the box”. On the other hand, by using a
Flat Model, users would understand that the image on
the screen does not account for occlusions, and there-
fore, they would have to do that job themselves.
4.2 Object Labelling
With respect to Object Labelling, it was hypothesised
that, when users are analysing labels (e.g. of streets,
rivers, cities, and so on) which are not oriented to-
wards the current viewing direction depicted in the
device, they will feel much more difficulty reading
the words, due to the decreased visibility, especially
when looking in a direction which is parallel to the
map’s surface (see Figure 10).
In such case, users will not be able to read labels
as faster, and will pan the map closer to the camera so
it becomes easier to read. Particularly in the case of
EVALUATION OF VISUALIZATION FEATURES IN THREE-DIMENSIONAL LOCATION-BASED MOBILE
SERVICES
333
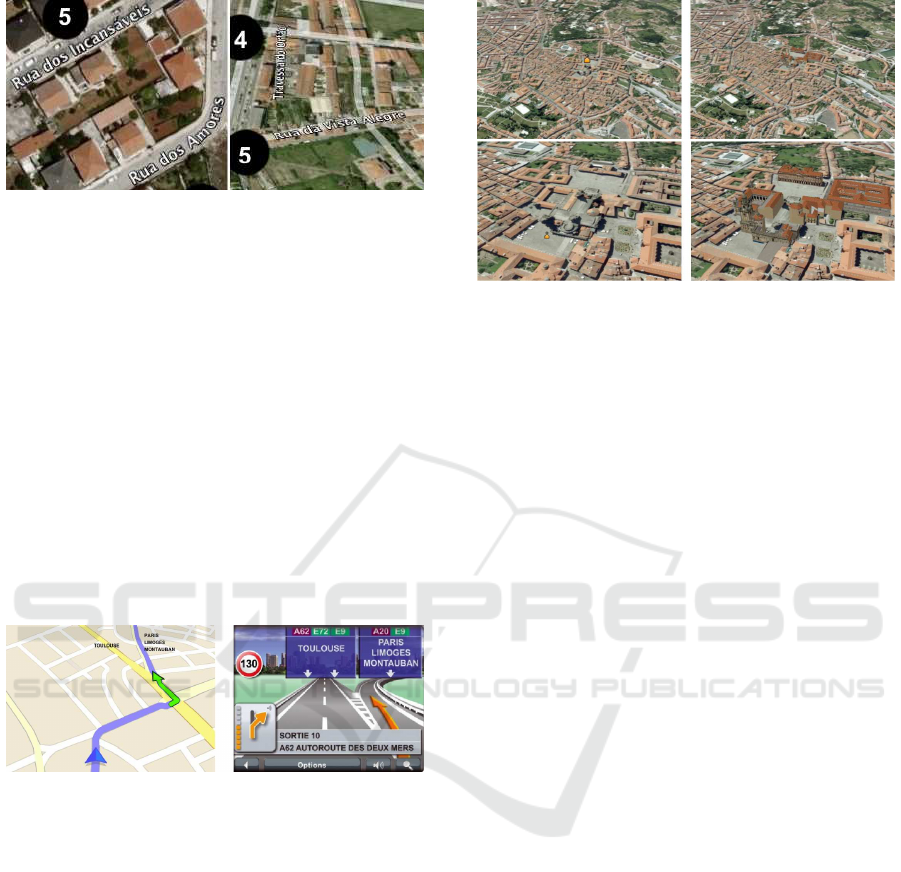
Figure 10: The 2 tasks that evaluate the impact of
Perspective-Adaptive Labelling (close-up).
labels which are almost parallel to the camera’s view-
ing direction, some users will wish to skip words, if
they find them “too difficult” to read.
4.3 Route Indication
It was hypothesised that, when a user is presented
with an image which looks more familiar to him,
given the current context, the user will be able to per-
form his task with lesser effort (see Figure 11). It is
assumed that users won’t make more mistakes using
one approach or the other, but that a significant dif-
ference in the time they require to complete their task
may arise, i.e., that a Simulative component will result
in faster responsiveness than an Instructive approach.
Figure 11: 2 of the tasks that evaluate the impact of Instruc-
tive and Simulative route indications.
4.4 Landmark Symbology
For this feature vector, it was hypothesised that users
will require Adaptive Zoom functionality, i.e., that the
majority of them will choose an abstract landmark
representation of a given building, when a map which
is zoomed out far from the ground is used, but a more
concrete representation when at close range (see Fig-
ure 12).
The basis of such hypothesis rests on the various
issues raised by the cartographic generalisation pro-
cedures, as previously explained in Section 3.5. For
instance, even if a concrete landmark is used rather
than an abstract representation, there are certain zoom
levels of a map which do not allow users to perceive
enough features of that landmark, in order to identify
it with a significant confidence level.
Figure 12: The preferences that evaluates the users’ need for
an Adaptive Zoom approach, when a map which is zoomed
out far / zoomed in close to the ground is used.
5 RESULTS
In total, 149 test subjects answered the questionnaire,
mostly from a student population in Computer Sci-
ence and Informatics: 89% were male, and 78% were
in the 18 to 25 age group. In general, prior to an-
swering the questionnaire, subjects considered them-
selves fairly capable of using both maps and GPS nav-
igators, given the approximate 50-50 ratio shared be-
tween “average” and “experienced” users. Only 3%
of the participants reported they were unfamiliar with
either maps or GPS navigators.
5.1 Image Realism
Regarding the impact of the presence and absence of
Simple Textured Buildings, there were 91% and 77%
correct answers, respectively, in both situations. Al-
though slight, the difference between the two cases
shows the advantage of the presence of Simple Tex-
tured Buildings over its absence. Test subjects re-
quired, in average, 11s (7.3s standard deviation) to an-
swer when buildings were shown, and 15s (6.4s s.d.)
using a classic 2.5D map. While in this case there
was just a 14% difference in the number of correct
answers, in the case of Photo Textured Buildings com-
ponent there were 88% and 30% correct answers re-
spectively. Despite this difference between both ques-
tions, the number of correct answers in the presence
of Photo Textured Buildings was almost the same as
in the case of Simple Textured Buildings. In terms of
answers times, 95% of the subjects had already an-
swered before the first 21s in the presence of Photo
Textured Buildings, about 4.4s less than in the pres-
ence of Simple Textured Buildings. When the build-
ings were all removed from the exercise with Photo
Textured Buildings (i.e., in its absence), 95% of test
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
334
subjects answered before the first 42.7s (avg. 17.8s,
s.d. 14.4s) against 25.4s (avg. 15s, s.d. 6.4s). This
clearly demonstrates that the results with Photo Tex-
tured Buildings are more stable, considering the in-
crease in difficulty of the exercise.
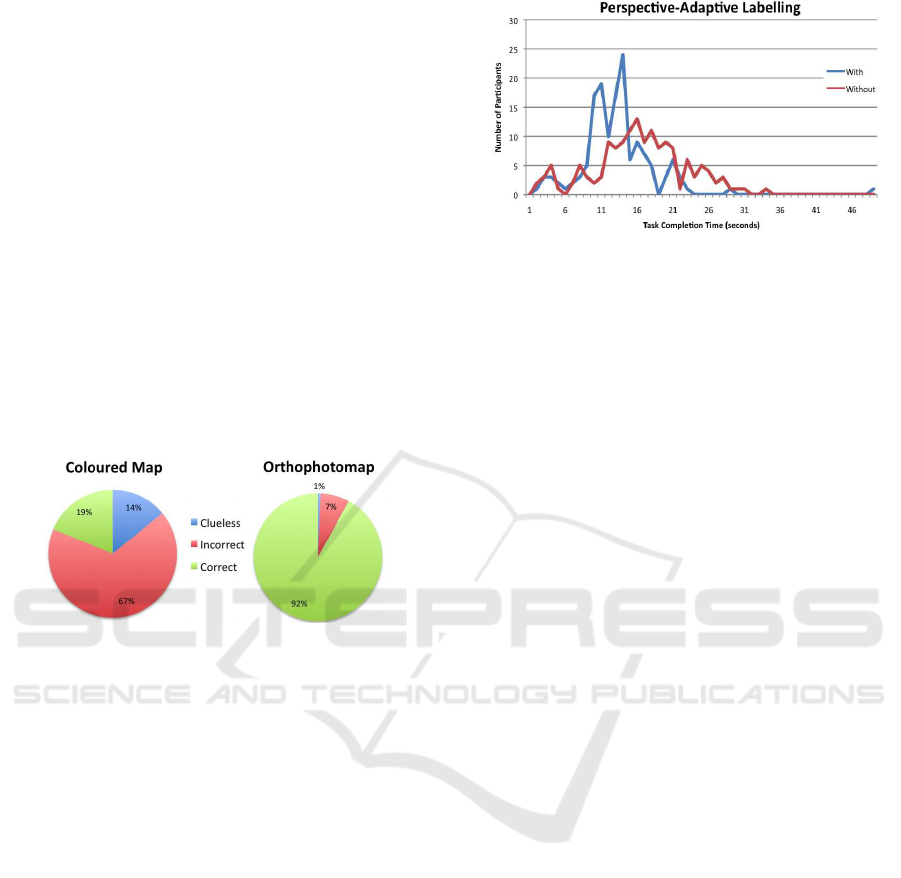
In the presence of a Coloured Map, the num-
ber of participants who were unable to answer the
question was quite high (14%). The same happened
with the number of wrong answers being quite differ-
ent from the Orthophotomap (67% and 7%, respec-
tively). Nevertheless, subjects had no apparent dif-
ficulty in finding the correct answer, in the presence
of the Orthophotomap component, as 92% chose the
correct answer in similar conditions (as shown in Fig-
ure 13). Besides being more effective, the Orthopho-
tomap proved also to be more efficient as subjects
took an average time of 9.3s (s.d. 18.4s) to answer the
question, considerably faster compared to the 23.5s
(s.d. 16.8s) in the case of the Coloured Map.
Figure 13: Answers in the presence of a Coloured Map and
an equivalent Orthophotomap.
In terms of Surface Model, there was just a 5%
difference in the number of correct answers between
both cases, with advantage to the Terrain Model.
However, the Terrain Model was much more efficient,
as the average response time was 7.5s (s.d. 5s), com-
pared to the 15.3s (s.d. 13.8s) obtained with the Flat
Model.
These results point out that image realism can im-
prove the task of matching the 3D map with reality,
both maximising effectiveness (lesser mistakes) and
effectiveness (lesser time).
5.2 Object Labelling
With respect to Object Labelling, when labels were
oriented towards the camera, the subjects took lesser
time to perform the task (avg. 11.8s, s.d. 5.2s) than
when labels were not oriented according to the cam-
era (avg. 15s, s.d. 6.4s), as shown in Figure 14.
From these results a conclusion can be made that
Perspective-Adaptive Labelling can increase readabil-
ity of labels in 3D maps.
Figure 14: Answer times in the presence and absence of
Perspective-Adaptive Labelling component.
5.3 Route Indication
With respect to the Route Indication there was no rel-
evant difference in terms of answer correctness be-
tween Instructive or Simulative components. In terms
of average answer time, the Instructive component re-
sulted in 11.8s (s.d. 7.9s) against 8.6s (s.d. 5.9s).
Provided with the Simulative approach, 95% of the
participants had already found the matching route in-
dication, after about 19.8s, compared to 26.6s in the
opposite case.
Although both techniques can achieve similar lev-
els of correctness, the Simulative approach can speed-
up the task of matching reality with the 3D map. This
can be of great importance when supporting activities
that demand short response times, such as driving.
5.4 Landmark Symbology
A vast majority of participants (87%) answered they
would more easily identify and recognise the presence
of a given distant landmark, when an abstract repre-
sentation of that landmark was used. Approximately
86% of them indicated their preference towards the
use of concrete landmarks at close range.
Different zoom levels over 3D maps will encom-
pass also different levels of visual complexity, and as
such, Adaptive Zoom functionality is of great impor-
tance for maximising readability.
6 CONCLUSIONS AND FUTURE
WORK
In this study, a generic Evaluation Framework was
proposed as the main methodology for the specifica-
tion, development and evaluation of new or existing
solutions in the 3D map visualisation problem domain
for LBMS. Feature Vectors can individually describe
a set of choices (orientations) and degrees of appli-
EVALUATION OF VISUALIZATION FEATURES IN THREE-DIMENSIONAL LOCATION-BASED MOBILE
SERVICES
335

cability (magnitudes). The proposed framework fo-
cuses on 6 feature vectors namely, Image Realism,
Object Labelling, Visual-Spatial Abstraction, Route
Indication, Landmark Symbology, and finally Con-
textual Awareness. These feature vectors encompass
the most relevant visualisation issues in 3D maps on
LBMS, but there was no intent to cover them com-
pletely. A future line of research would consist in
analysing the totality of features that address visuali-
sation aspects, in the context of exploration of urban
environments, using 3D LBMS as guidance.
Although the state of the art contemplates some
of the issues involved, the questionnaire gave a much
more clear insight on them. In general, it is ob-
served a greater tendency towards the need of Image
Realism rather than Image Functionalism. In terms
of Perspective-Adaptive Labelling, it was proved that
users are at disadvantage, if they are given the task to
read labels of a map, when these labels are not ori-
ented towards the camera’s viewing direction. The
results also demonstrated that users can more easily
identify the presence of a distant landmark with an ab-
stract representation, and a close landmark with a con-
crete representation, which is indicative of the need of
an Adaptive-Zoom behaviour.
Since there are several limitations on the kind of
measurements that can be performed with the pro-
posed questionnaire in order to evaluate feature vec-
tors, it would be interesting to perform other kinds of
tests, with particular focus on dynamic experiments,
to get more information about other vectors such as
Visual-Spatial Abstraction and Contextual Awareness
which were not evaluated. An example of these exper-
iments would include using a driving simulator to test
the participants’ reflexes, given a situation where they
are approaching a manoeuvre, and deciding which
way to go.
From the results obtained from this work, and fu-
ture lines of research, we expect the definition of new
paradigms of visualisation for 3D map visualisation
on LBMS that maximise usability and improve user
experience and performance.
ACKNOWLEDGEMENTS
We would like to thank NDrive Navigation Systems,
S.A. for the support provided for this research project.
REFERENCES
Been, K., Daiches, E., and Yap, C. (2006). Dynamic map la-
beling. IEEE Transactions on Visualization and Com-
puter Graphics, 12(5):773–780.
Bolin, M. R. and Meyer, G. W. (1999). A visual difference
metric for realistic image synthesis. In Proc. SPIE,
pages 106–120.
Borenstein, J., Everett, H. R., and Feng, L. (1996). ”Where
am I?” – Sensors and Methods for Mobile Robot Po-
sitioning. The University of Michigan.
Burigat, S. and Chittaro, L. (2005). Location-aware visual-
ization of vrml models in gps-based mobile guides. In
John, N. W., Ressler, S., Chittaro, L., and Duce, D. A.,
editors, Web3D, pages 57–64. ACM.
Chen, G. and Kotz, D. (2000). A survey of context-
aware mobile computing research. Technical Report
TR2000-381, Dept. of Computer Science, Dartmouth
College.
Coelho, A. (2006). Expeditious Modelling of Virtual Urban
Environments based on Interoperability and Geospa-
tial Awareness (in Portuguese). PhD thesis, Faculdade
de Engenharia da Universidade do Porto.
Elias, B., Paelke, V., and Kuhnt, S. (2005). Concepts for the
cartographic visualization of landmarks. In Proceed-
ings of Symposium 2005 Location Based Services &
TeleCartography, page 11.
Ferwerda, J. A. (2003). Three varieties of realism in com-
puter graphics. In In Proceedings SPIE Human Vision
and Electronic Imaging ’03, pages 290–297.
Hunolstein, S. V. and Zipf, A. (2003). Towards task oriented
map-based mobile guides. In Workshop ”HCI in Mo-
bile Guides” at Mobile HCI 2003. 5th International
Symp. on HCI with Mobile Devices and Services.
Lange, E. and Ch, Z. R. (2003). The degree of realism of
GIS-based virtual landscapes: Implications for spa-
tial planning. In D. Fritsch and R. Spiller (eds) Pho-
togrammetric Week ’99, pages 367–374.
McNamara, A., Chalmers, A., and Trocianko, T. (2000).
Visual perception in realistic image synthesis. In Co-
quillart, S. and Duke, D., editors, STAR Proceedings
of Eurographics 2000, Interlaken, Switzerland. Euro-
graphics Association.
Milgram, P. and Kishino, F. (1994). A taxonomy of mixed
reality visual displays. IEICE Transactions on Infor-
mation Systems, E77-D(12):1321–1329.
Nurminen, A. (2006). The m-loma mobile 3d
map project website. http://www.init.hut.fi/research
%26projects/m-loma/. Last Checked: November,
2008.
Rademacher, P., Lengyel, J., Cutrell, E., and Whitted, T.
(2001). Measuring the perception of visual realism
in images. In Proceedings of the 12th Eurographics
Workshop on Rendering Techniques, pages 235–248,
London, UK. Springer-Verlag.
van Dijk, S., van Kreveld, M., Strijk, T., and Wolff, A.
(1999). Towards an evaluation of quality for label
placement methods. In Proc. 19th Internat. Car-
tographic Conf. (ICC’99), pages 905–913, Ottawa,
Canada. Internat. Cartographic Association.
Wolff, A. (1999). Automated label placement in theory and
practice. In PhD thesis, Freie Universit
¨
at.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
336
