
ON-LINE FACE TRACKING UNDER LARGE LIGHTING
CONDITION VARIATIONS USING INCREMENTAL LEARNING
Lyes Hamoudi, Khaled Boukharouba, Jacques Boonaert
and St
´
ephane Lecoeuche
Ecole des Mines de Douai, D
´
epartement Informatique et Automatique
941 Rue Charles Bourseul, 59508 Douai, France
Keywords:
Face detection and tracking, Colour and texture segmentation, Classification of non-stationary data, SVM
classification.
Abstract:
To be efficient outdoors, automated video surveillance systems should recognize and monitor humans activities
under various amounts of light. In this paper, we present a human face tracking system that is based on the
classification of the skin pixels using colour and texture properties. The originality of this work concerns
the use of a specific dynamical classifier. An incremental svm algorithm equipped with dynamic learning
and unlearning rules, is designed to track the variation of the skin-pixels distribution. This adaptive skin
classification system is able to detect and track a face in large lighting condition variations.
1 INTRODUCTION
A fundamental and challenging problem in computer
vision is the detection and tracking of faces and fa-
cial features in video sequences. Face detection area
has applications in various fields, like Video surveil-
lance, Security control systems, Human-computer in-
teraction (HCI), Videophony and Videogames. Many
researchers proposed different methods addressing
the problem of face detection, and there are sev-
eral possibilities to classify these methods. In their
survey, (Yang et al., 2002) classified different tech-
niques used in face detection as Knowledge-based
methods, Feature-based methods, Template match-
ing methods and Appearance-based methods. Among
feature-based face detection methods, the ones using
skin colour segmentation have gained strong popular-
ity. They are orientation invariant and computation-
ally inexpensive to process, since colour is a low-level
property (Martinkauppi, 2002). It is therefore suitable
for real-time systems.
A problem with skin colour segmentation arises
under varying lighting conditions. The same skin area
appears as two different colours under two different
lighting conditions (Sigal et al., 2004). Several ap-
proaches have been proposed to use skin colour in
varying lighting conditions. (McKenna et al., 1999)
presented an adaptive colour mixture model to track
faces under varying illumination conditions. (Strring
et al., 1999) estimated a reflectance model of the skin,
using knowledge about the camera parameters and the
light source spectrum. They estimated the location
of the skin colour area in the chromaticity plane for
different light sources. (Soriano et al., 2000) trans-
formed the RGB pixel map to Normalized Colour
Coordinates (NCC) allowing a pixel brightness de-
pendence reduction. In their work, a chromaticity
histogram of some manually selected skin pixels is
used as an initial, non-parametric colour model. (Si-
gal et al., 2004) described an approach for real-time
skin segmentation in video sequences, which enables
segmentation despite wide variation in illumination
during tracking. They used an explicit second order
Markov model to predict evolution of the skin-colour
(HSV) histogram over time. (Chow et al., 2006) pre-
sented an algorithm where skin-coloured pixels are
identified using a region-based approach. They pro-
posed a colour compensation scheme to balance ex-
treme lighting conditions, and the distributions of the
skin-colour components under various illuminations
are modelled by means of the maximum-likelihood
method.
(La Cascia et al., 2000) proposed an algorithm
for 3D head tracking that uses a texture mapped 3D
rigid surface model for the head. They use a method
that employs an orthogonal illumination basis that is
pre-computed off-line over a training set of face im-
ages collected under varying illumination conditions.
These proposed methods for handle the variation of
lighting conditions are based on a modelling, estima-
tion or a prediction of the skin colour, or a colour
compensation scheme. For most of them, large sets
636
Hamoudi L., Boukharouba K., Boonaert J. and Lecoeuche S. (2009).
ON-LINE FACE TRACKING UNDER LARGE LIGHTING CONDITION VARIATIONS USING INCREMENTAL LEARNING.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 636-643
DOI: 10.5220/0001806106360643
Copyright
c
SciTePress

Colour Space
Transformation
Skin-Pixels Adaptive
Classification
Morphological Operations and
Facial Features Detection
Face
Detected
Input
Image
Figure 1: Face detection scheme.
of images of face under varying illumination condi-
tions are required in the learning stage. In this pa-
per, we propose a face tracking method that is able
to handle large lighting condition variations, with-
out using large training sets of image samples. The
method uses an incremental svm classification algo-
rithm equipped with dynamic learning and unlearn-
ing rules (Cauwenberghs and Poggio, 2000). It is de-
signed to track the variation of skin-pixels distribution
in the feature space over time. This property allows an
on-line adaptation of the skin-pixel cluster discrimi-
nate function.
We begin this paper by introducing the method
scheme, in the second section. We develop three
stages (colour space transformation, skin-pixels adap-
tive classification, morphological operations and fa-
cial features detection). Skin-pixels adaptive classifi-
cation is the key feature of our face tracking method.
The paper ends with an experimental evaluation of the
system.
2 METHOD PRESENTATION
Our face tracking system is composed of three steps
(Figure 1). It begins with the transformation of the
input RGB image into THS format (Texture, Hue and
Saturation). This new format avoids intensity com-
ponent and so, it is less sensitive to lighting varia-
tions. At the second step, a dynamic classification
of each pixel in the image as a skin-pixel or a non-
skin-pixel is done. This classification allows tracking
the skin-pixels cluster over time. Finally, the system
identifies different skin regions in the skin detected
image by using morphological operations and geo-
metrical analysis. The last stage is designed to de-
cide whether each of the skin regions identified is a
face or not by looking for features as eyes and mouth
and spatial relation between these features. For each
frame, the pixels that are part of the region recognised
as a face are incrementally added into the skin-pixels
model using specific learning procedures. To achieve
the skin-pixels model adaptation, the pixels learned at
the latest frames will be decrementally removed using
unlearning procedures.
2.1 Colour Space Transformation
The Colour space transformation is based on the
(Forsyth and Fleck, 1999) algorithm. The original
colour image is in RGB format. The R, G, and B val-
ues are transformed into log-opponent values I, Rg,
and By, and from these values Texture, Hue, and Sat-
uration are computed (Forsyth and Fleck, 1999).
Human faces have a distinct texture that can be
used to separate them from different objects (Cula
et al., 2005), and skin in images tends to have very
smooth texture. A Texture map is used to find regions
of low texture information. To generate this Texture
map, the original image I is filtered by a median fil-
ter Ψ, the filtered image is subtracted from I, and the
absolute value of the difference is filtered again by Ψ.
Hue and Saturation are used to select those regions
whose colour matches that of skin. They are simply
the direction and magnitude of the vector (Rg, By),
and are calculated as:
Texture = Ψ(
|
I − Ψ(I)
|
)
Hue = arctan
2
(Rg,By)
Saturation =
p
(Rg
2
+ By
2
)
(1)
Figure 2.a represents the RGB image, and Figures 2.b,
2.c and 2.d represent respectively the resulting Texture
map, Hue and Saturation components.
2.2 Skin Pixels Marking
With Texture, Hue, and Saturation components, re-
gions of skin can be extracted using a classification
task. For the skin-pixels classification, a simple and
commonly used method defines skin to have a certain
range or values in some coordinates of a colour space.
This can easily be implemented as a look-up table or
as threshold values (Chai and Ngan, 1998). With em-
pirically chosen thresholds [Tex L, Tex H], [Hue L,
Hue H] and [Sat L, Sat H], a pixel is classified as be-
ing a skin-pixel if its values THS fall within the ranges
(i.e. Tex
L < T < Tex H, and Hue L < H < Hue H,
and Sat L < S < Sat H). Thus, if a pixel is classi-
fied as a skin-pixel it is marked in a binary skin map
array where 1 corresponds to the coordinates being a
ON-LINE FACE TRACKING UNDER LARGE LIGHTING CONDITION VARIATIONS USING INCREMENTAL
LEARNING
637

b. Texture
c. Hue
d. Saturation
e. Binary skin
map
f. Skin map after
morphological
operation
g. Segmented grayscale image
h. Facial features
detection
i. Face detecteda. Original
RGB image
Figure 2: Face detection steps.
skin pixel in the original image and 0 corresponds to a
non-skin pixel. The skin map array can be considered
as a black and white binary image with skin regions
appearing as white, and the non-skin regions as black,
see Figure 2.e.
The method using thresholds works fairly well,
and tolerates some illumination variations (Chai and
Ngan, 1998). Nevertheless, in large lighting varia-
tion, it proves defective, since the distribution of the
skin-pixels in the feature space should be significantly
changed over time. Therefore, the thresholds need to
be updated. To avoid this, in the section 3, a classi-
fication algorithm is presented. Using this technique,
the decision model will be updated according to the
non-stationary of data that characterise the skin pix-
els cluster. Before presenting the skin-pixels adaptive
classification, the next section presents the last stage
of our face detection scheme.
2.3 Morphological Operations and
Facial Features Extraction
The binary skin map regions are processed by mor-
phological operations for delete noise, close holes and
separate regions. Since a face has an elliptical shape
with usually a vertical orientation, we delete the re-
gions that have not an elliptical shape, as well as those
that have a horizontal orientation that could corre-
spond to an arm or to an object with colour and texture
similar to human skin. The remaining regions in the
skin map represent the face candidates, see Figure 2.f.
Finally, these candidates are verified by searching for
facial features inside the regions. The technique re-
lies on searching for darker parts (holes) in the skin
regions, so that these holes would correspond to eyes
and mouth. The region that contains holes with tri-
angular spatial relation is validated as being a face;
see Figure 2.g and 2.h and 2.i. The other regions are
discarded.
3 SKIN-PIXELS ADAPTIVE
CLASSIFICATION
This section details the algorithm used to classify skin
pixels under large lighting variations. The goal is to
label the pixels into skin-pixels and non-skin ones us-
ing an update decision model. For that, we use an in-
cremental svm classifier equipped with learning and
unlearning rules (Cauwenberghs and Poggio, 2000)
that will allow the tracking of the cluster evolution
due to lighting condition variations. Figure 3 illus-
trates the need of cluster adaption by drawing a de-
cision function at time t, and at time t + N. C is the
cluster or the model of skin-pixels and f
t
its temporal
boundary decision function, that we will simply call
the boundary. At each frame (time=t) of the video se-
quence, each pixel x
i
(T
i
,H
i
,S
i
) ∈ R
3
will be classified
as a skin-pixel if f
t
(x) ≥ 0. So,
if f
t
(x) ≥ 0, then x ∈ C
if f
t
(x) < 0, then x /∈ C
(2)
f
t
is defined in THS feature space (THS space) by :
f
t
(x) =
d
∑
i
α
i
K(x
i
,x) + ρ (3)
ρ is the offset of the function and K (•,•) is the RBF
kernel. d is the number of skin-pixels. The weights
α
i
are the Lagrange multipliers and they are obtained
by minimizing a convex quadratic objective function
(Vapnik, 1995):
min
0≤α≤C
: W =
1
2
∑
i
∑
j
α
i
α
j
K(x
i
,x
j
) +
∑
i
α
i
ρ −ρ (4)
The boundary function f
t
is adapted by adding the
skin-pixels of the new frames and by removing those
of the old frames. For example, on the Figure 3,
the triangular dots represent the skin-pixels at time
t, and the circular dots represent the skin-pixels at
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
638
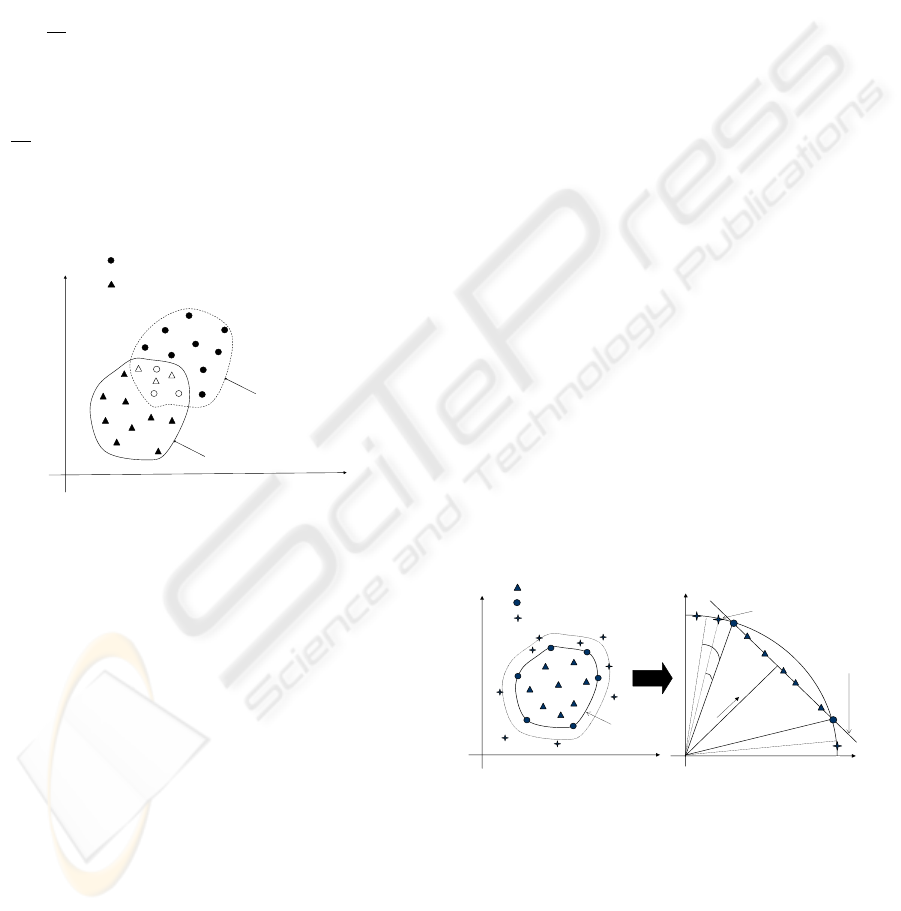
time t + N. The adaptation of the decision function
will be done by incrementally adding the full circular
dots, and by incrementally removing the full triangu-
lar dots.
The key is to add each new pixel to the solu-
tion while always retaining the Karush Kuhn Tucker
(KKT) conditions satisfied on all previously seen pix-
els. The first order conditions on the gradient of W
lead to the KKT conditions:
g
i
=
∂W
∂α
i
=
s
∑
j=1
α
j
K(x
i
,x
j
) + ρ
= f (x
i
)
> 0; α
i
= 0
= 0; 0 < α
i
< a, a = cste
< 0; α
i
= a
∂W
∂ρ
=
s
∑
j=1
α
j
− 1 = 0
(5)
where s is the number of support vectors.
f
t
: The boundary at time t
f
t+N
: The boundary
at time t+N
: Skin-pixels that have to be learned, at
time=t
: Skin-pixels that have to be removed, at
time=t+N
Figure 3: Decision function (the boundary) adaptation ac-
cording to the skin-pixels cluster evolution.
This classification divides all the pixels of the image
into 3 sets:
• The set D consists of the inside vectors, which are
situated within the boundary (∀x
i
∈ D,g
i
> 0).
• The set S consists of the support vectorhis, which
are situated on the boundary (∀x
j
∈ S,g
j
= 0). j =
1,.. .,s.
• The set U consists of the uncertain vectors,
which are situated outside of the boundary
(∀x
u
∈ U,g
u
< 0).
C is the skin-pixels cluster, so D ∪ S = C. A pixel
classified in D or S is immediately classified as a
skin-pixel. In addition, for every pixel x
i
classified
in C, the value g
i
is stored in a set of associated val-
ues G. When a pixel is classified in U , two cases
should be considered. In most of the cases, this pixel
is not a skin pixel, his attributes being too far from
the skin class model. But for some cases, this pixel
could be considered as a skin pixel where his colour
attributes have changed due to lighting variation and
then should be used to update the skin cluster model.
A similarity measure is then required to select these
uncertain pixels.
3.1 Similarity Measure
In the principle of updating the skin-pixels model over
time, whenever a new or a candidate pixel x
c
is clas-
sified in U, it is assumed that if is fairly close to the
boundary, it could correspond to a skin pixel, having
undergone a change of lighting. Then, we calculate
the distance of this pixel from the boundary. If this
distance is too large, the pixel will be discarded. But
if it is small enough, it will be added to S and the
boundary function will be adjusted until x
c
is on the
boundary, so g
c
= 0. For that, we introduce a new
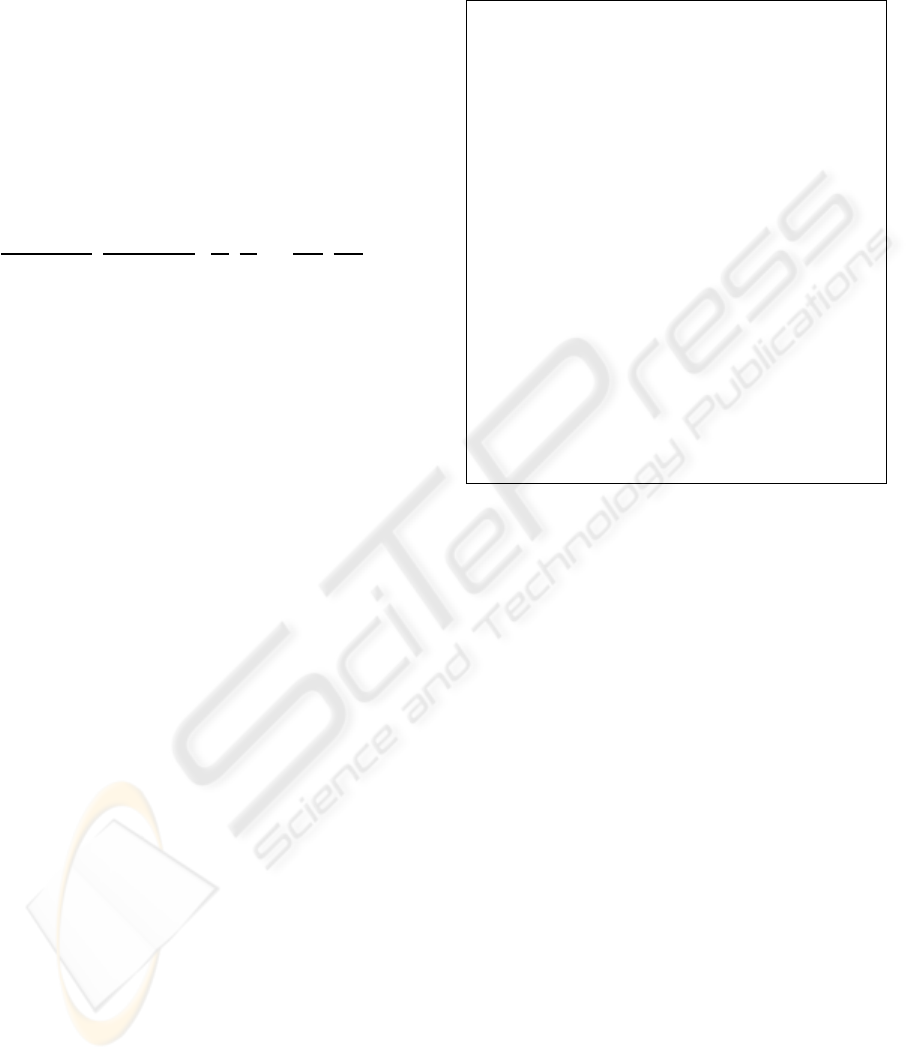
measure of similarity. We calculate in the Hilbert fea-
ture space Γ (see Figure 4) the angle between the can-
didate pixel x
c
and every support vector.
The dot product between x
c
and x
j
is expressed as:
φ(x
c
),φ(x
j
)
=
k
φ(x
c
)
k
Γ
φ(x
j
)
Γ
cos(φ(x
c
),φ(x
j
)).
Therefore using RBF kernel, the smallest angle θ
nst
is
expressed as:
θ
nst
= arg min
j
cos
−1
(K(x
c
,x
j
)),x
j
∈
{
S
}
(6)
We compare the smallest angle with a threshold θ
sim
.
If θ
nst
≤ θ
sim
, x
c
will be added to S and the boundary
function will adjust, else it will be discarded.
Inside Vectors
Support Vectors
Uncertain Vectors
(x)
Candidate pixel
The boundary
The boundary
W
nst
sim
Figure 4: Illustration of data projection in the Hilbert space
using Gaussian kernel.
3.2 Incremental Learning
When x
c
is added to the set S, the parameters of the
skin cluster boundary function is updated iteratively.
At every iteration, f
t
(x) is adapted until g
c
= 0. z is
the set of the parameters
ρ,α
j
. These parameters
ON-LINE FACE TRACKING UNDER LARGE LIGHTING CONDITION VARIATIONS USING INCREMENTAL
LEARNING
639
change to keep their KKT conditions satisfied. For
that, those conditions are expressed differentially as:
∆g
i
= K(x
i
,x
c
)∆α +
s
∑
j=1
∆α
j
K(x
i
,x
j
) +∆ρ
0 = ∆α +
s
∑
j=1
∆α
j
, j = 1, ...,s, i = 1,... ,d
(7)
Since g
j
= 0 for every support vector, the changes in
weights must satisfy
0 1 ·· · 1
1 K(x
1
,x
1
) ·· · K(x
1
,x
s
)
.
.
.
.
.
.
.
.
.
.
.
.
1 K(x
s
,x
1
) ··· K(x
s
,x
s
)
| {z }
Jacobian Q
.
∆ρ
∆α
1
.
.
.
∆α
s
| {z }
Delta
= −
1
K(x
1
,x
c
)
.
.
.
K(x
s
,x
c
)
| {z }
h
·∆α
So, Del ta = − Q
−1
|{z}
R
×h × ∆α.
Thus, should be defined:
∆ρ = β
0
.∆α
∆α
j
= β
j
.∆α,∀x
j
∈ S
(8)
with weights sensitivities given by
β
0
β
1
··· β
s
= −R · h (9)
Where R = Q
−1
, and β = 0 for all x outside S. By
this way, the values of the incrementation steps of all
the parameters are calculated.
Parameters Update. The associated value g
c
and the
weight α
c
of the pixel x
c
added to S, will be added
to the set G and the set A
i
as: G
s+1
← G
s
∪
{
g
c
}
and
A
s+1
i
← A
s
i
∪
{
α
c
}
. The matrix R (Q) will be updated
by adding a line and a column corresponding to the
new pixel x
c
.
Gradient set Update. When x
c
is added to S, accord-
ing to the update of the boundary function, all the el-
ements of G should be modified. Then:
∀x
i
∈ D, ∆g
i
= γ
i
∆α, i = 1,.. ., d (10)
where γ
i
is defined as:
γ
i
= K(x
i
,x
c
) +
∑
j
K(x
i
,x
j
).β
j
+ β
0
,
i = 1,.. .,d, j = 1, .. ., s
When x
c
is added to D, α
c
is equal to 0 and only G
will be incremented: G
s+1
← G
s
∪
{
g
c
}
.
Remark 1. During the adjustment, a support vector
x
j
that was on the boundary could be found inside the
boundary, (i.e. by the incrementation procedure, to
keep the KKT conditions satisfied, α
c
could end up
equal to zero), in this case x
j
will be eliminated from
S and put in D, and all ρ, α
j
and R will be updated.
Incremental Learning Algorithm. To conclude, the
incremental learning procedure for a candidate pixel
x
c
is defined as:
Initialize α
c
to zero.
If g
c
> 0, add x
c
to D, update G, terminate.
If g
c
= 0, add x
c
to S, update α
j
and ρ (Eq.8), R
and G, terminate.
If g
c
< 0, add x
c
to U, calculate the angle θ
nst
.
If θ
nst
< θ
sim
do
add x
c
to S
While g
c
< 0 do
α
c
= α
c
+ ∆α
Calculate ∆ρ (Eq.8), ρ = ρ + ∆ρ
for each x
j
∈ S,
calculate ∆α
j
(Eq.8), α
j
= α
j
+ ∆α
j
for each x
i
∈ C,
calculate ∆g
i
(Eq.10), g
i
= g
i
+ ∆g
i
Check if a support vector (or several)
passes inside the boundary (α
j
≤ 0). If true, delete
x
j
from S and add it to D, and update all the pa-
rameters.
Repeat as necessary (until g
c
= 0).
Remark 2. The initial learning is done using the first
frames of the video sequence. On these frames, we
apply a face detection using the thresholds method
(section 2.2). We obtained several series of thresh-
olds by collecting several skin-pixels models (in THS
space) using different video sequences with various
people under different lighting conditions. On each
of the first frames, we apply the thresholds method
using one series of thresholds at time. One of the se-
ries leads to obtain the better face detection among
the others. So, once the face detected, the pixels rec-
ognized as being skin pixels are presented to the clas-
sifier one pixel by one, without using the test of sim-
ilarity, and all will be granted to C, constructing by
this way the initial boundary, that will be used for the
tracking.
3.3 Decremental Learning
The unlearning procedure complements the learning
procedure to allows the system to track the cluster C
over lighting condition variations, by forgetting (re-
moving from C) the previous learned data that corre-
spond to skin-pixels at the initial learning stage, and
after, those on the oldest frames. When the system
process the N
th
frame, the skin-pixels learned from
the (N − m)
th
frame correspond to obsolete informa-
tion and then should be forgotten. When a pixel x
j
is
removed from S, g
j
will be removed from G, and z
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
640
will be adapted decrementally and the boundary will
move until x
j
is out (α
i
≤ 0). The matrix R is up-
dated by deleting from the matrix Q the column j+1
and the line j + 1 (corresponding to x
j
that has been
removed). When a pixel x
i
is removed from D, only
g
i
is removed from G.
Decremental Unlearning Algorithm. When remov-
ing the pixel x
r
from C, the parameters
α
s−1
,ρ
s−1
are expressed in terms of the parameters
{
α
s
,ρ
s
}
, the
matrix R, and x
r
as:
If g
r
> 0, (x
r
∈ D) remove x
r
from C, G ← G −
{
g
r
}
, terminate.
If g
r
= 0, remove x
r
from S (and thus from C),
While α
r
> 0, do α
r
= α
r
− ∆α
Calculate ∆ρ (Eq.8), ρ = ρ − ∆ρ
for each x
j
∈ S,
calculate ∆α
j
(Eq.8), α
j
= α
j
− ∆α
j
for each x
i
∈ C,
calculate ∆g
i
(Eq.10), g
i
= g
i
− ∆g
i
Check if an inside vector x
i
∈ D (or several)
passes outside the boundary (g
i
≤ 0 ). If true, in-
terrupt the decremental unlearning, and apply the
incremental learning on x
i
.
Return to the decremental unlearning pro-
cedure.
Repeat as necessary (until α
r
= 0).
4 EXPERIMENTS
At first, we performed experiments on video se-
quences collected in our laboratory by a Philips
SPC900NC/00 web-cam (settings frame rate = 30fps,
image size 160x120 pixels). Each sequence is 600
frames long (20 seconds). The camera was mounted
on a laptop and volunteers were asked to sit down
in front of the laptop and perform free head motion
while we greatly vary the lighting, passing through
a very dark to a very enlightened state. We first
applied the tracking method using thresholds. This
method works quite well under constant lighting, but
fails when the lighting varies significantly. We then
applied the method using the incremental classifica-
tion. We fixed the kernel parameter σ = 5 and the
threshold angle θ
sim
= 1rad after applying several
experimentations. The unlearning procedure is
started at the 5
th
frame, i.e. when the system process
the N
th
frame of the video sequence, it unlearns the
pixels learned from the (N − 5)
th
frame. This value
proved to be efficient for a reliable on-line tracking
of skin-pixels cluster. The obtained results were very
encouraging, since the face was accurately tracked
on all the video sequences, except in the frames were
the face was in profile (because of the conditions to
find the two eyes and the mouth).
Secondly, we performed experiments on the
set of sequences collected and used by (La Cascia
et al., 2000). The set consists of 27 sequences (nine
sequences for each of three subjects) taken under
time varying illumination and where the subjects
perform free head motion. The time varying illu-
mination has a uniform component and a sinusoidal
directional component. It should be noted that the
time varying illumination is done in a non-linear
manner, by darkening the scene and specially the
right side, making the right side of the face extremely
dark. In addition, the free head motion is performed
such that the face is never completely in profile. All
the sequences are 200 frames long (approximatively
seven seconds), and were taken such that the first
frame is not always at the maximum of the illumina-
tion. The video signal was digitized at 30 frames per
second at a resolution of 320x240 non-interleaved
using the standard SGI O2 video input hardware
and then saved as Quicktime movies (M-JPEG com-
pressed). All of these sequences are available on-line:
http://www.cs.bu.edu/groups/ivc/HeadTracking/,
(and are the only available among those used in the
articles cited in the introduction). Figure 5 shows
examples of images of the three subjects from the
video sequences, showing time varying illumination
and free head motion.
Figure 6 shows the mean values of the manually
extracted skin-pixels on the 200 frames of a video
sequence, in the RGB colour space and in the THS
colour space. We can see that while there is a great
variance in the RGB, the THS is less sensitive to
lighting variation. As defined, we see that the Texture
and the Hue component have smooth values and are
quite constant through lighting variation. In addition,
the Saturation component is more dependent on great
lighting variation. In this case, it becomes clear that
the threshold method cannot obtain good results.
Thus, an adaptive classification method is needed to
track the skin-pixels cluster through the time varying
illumination. We cannot objectively compare our
results to those of (La Cascia et al., 2000), because
their system uses a texture mapped 3D rigid surface
model for the head. In addition, the output of their
system is the 3D head parameters and a 2D dynamic
texture map image. We just note that a version of the
tracker that used a planar model was unable to track
the whole sequence without losing track.
To evaluate our tracker, we first linked the nine
ON-LINE FACE TRACKING UNDER LARGE LIGHTING CONDITION VARIATIONS USING INCREMENTAL
LEARNING
641

sequences of each subject, obtaining three sequences
of 1800 frames. After, as ground truth, we manually
surrounded the face (black bounding box on Figure 5
on all the frames of each sequence, and we calculate
the horizontal and vertical coordinates X and Y
of the center of the bounding box surrounding the
face. Then, we applied our tracking algorithm on
each sequence, aiming to detect and track the face
skin-pixels. We also calculate the horizontal and
vertical coordinates X and Y of the center of the
bounding box surrounding each detected face (white
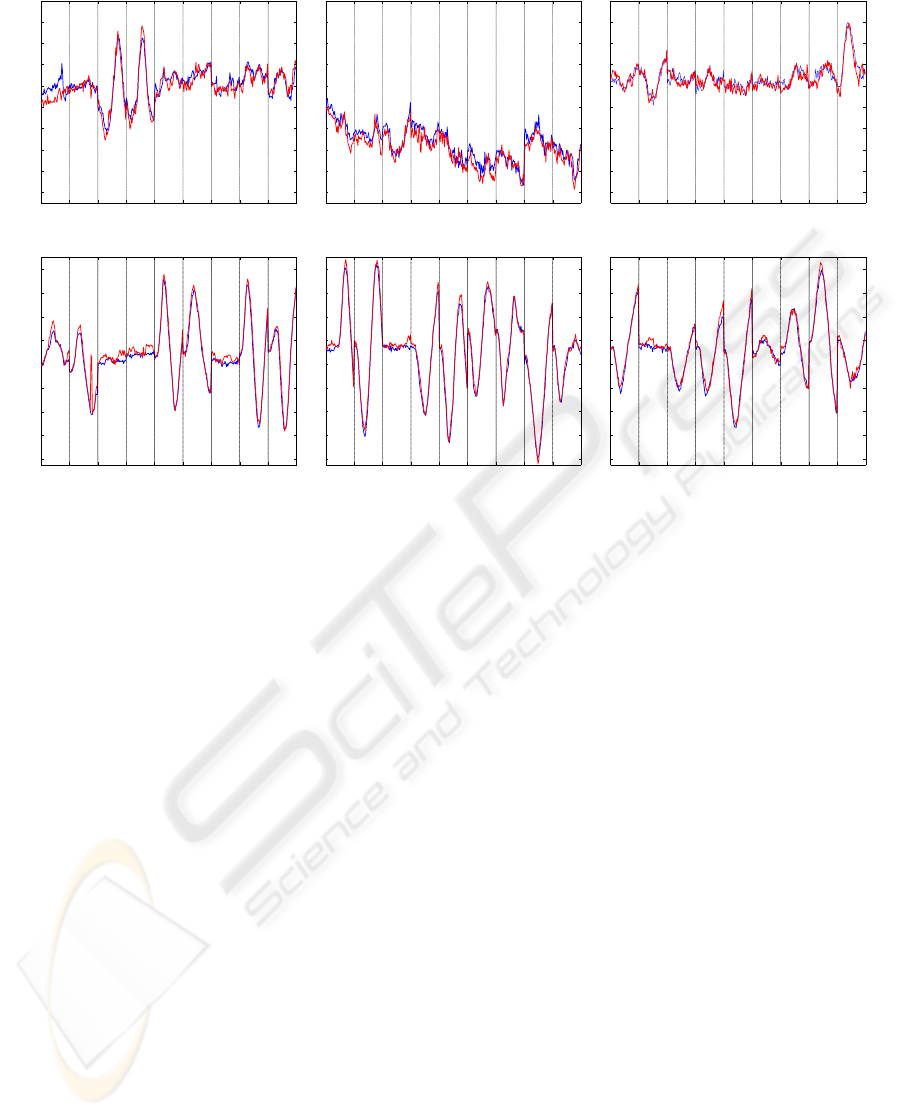
bounding box on Figure 5). Figure 7 shows the
curves of the evolution of the coordinates X and Y
of the center of the ground truth faces, superposed to
those of the detected faces. The pseudo sinusoidal
demeanor of the curves is due to the free head motion
of the subjects, and the abrupt transition corresponds
to where we linked the nine sequences. We can see
that the ground truth bounding box and the detected
bounding box are practically overlapped, proving that
all the face regions were detected. The centers of the
bounding box diverge only in the case where a face
side is heavily dark, so this part of the face was not
considered as containing skin by the tracker.
Figure 5: Example of images of the three subjects from
the video sequences, showing time varying illumination and
free head motion. With face detection results (white bound-
ing box) and ground truth (black bounding box).
0 25 50 75 100 125 150 175 200
0
20
40
60
80
100
120
140
160
180
RGB
B
G
R
0 25 50 75 100 125 150 175 200
0
20
40
60
80
100
120
140
160
180
THS
T
S
H
Figure 6: Mean values of manually extracted skin-pixels on
200 frames of a video sequence, in the RGB colour space
and in the THS colour space.
5 DISCUSSION
The results obtained by our algorithm are very en-
couraging. Nevertheless, it can still be improved on
several fronts. For example, we plan to develop an ini-
tialization method without using a pre-computed off-
line set of skin-pixels models. In addition, we plan
to develop a detection validation method that do not
need that the face is in front of the camera. Further-
more, we started to develop a multi-classes incremen-
tal svm classification, to be able to track several faces
at the same time.
6 CONCLUSIONS
In this paper, we presented an on-line algorithm that
makes use of human skin colour and texture proper-
ties, and uses an incremental svm classification for
face tracking, under large lighting condition varia-
tions. The results obtained are very encouraging, and
ameliorations are currently carried out. Our method
could be applied on several applications, such video-
phone applications and video surveillance systems.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
642
0 200 400 600 800 1000 1200 1400 1600 1800
80
90
100
110
120
130
140
150
160
170
Subject 1
X
0 200 400 600 800 1000 1200 1400 1600 1800
80
90
100
110
120
130
140
150
160
170
Subject 2
X
0 200 400 600 800 1000 1200 1400 1600 1800
80
90
100
110
120
130
140
150
160
170
Subject 3
X
0 200 400 600 800 1000 1200 1400 1600 1800
80
100
120
140
160
180
200
220
240
Y
0 200 400 600 800 1000 1200 1400 1600 1800
80
100
120
140
160
180
200
220
240
Y
0 200 400 600 800 1000 1200 1400 1600 1800
80
100
120
140
160
180
200
220
240
Y
Figure 7: The curves of the evolution of the coordinates X and Y of the center of the ground truth faces (in red), superposed
to those of the detected faces (in blue).
REFERENCES
Cauwenberghs, G. and Poggio, T. (2000). Incremental and
decremental support vector machine learning. In Neu-
ral Information Processing Systems.
Chai, D. and Ngan, K. (1998). Locating facial region of a
head-and-shoulders colour image. In 3rd IEEE Inter-
national Conference on Automatic Face and Gesture
Recognition.
Chow, T., Lam, K., and Wong, K. (2006). Efficient colour
face detection algorithm under different lighting con-
ditions. Journal of Electronic Imaging, 15(1):013015.
Cula, O., Dana, K., Murphy, F., and Rao, B. (2005). Skin
texture modeling. International Journal of Computer
Vision, 62 (1-2):97–119.
Forsyth, D. and Fleck, M. (1999). Automatic detection of
human nudes. International Journal of Computer Vi-
sion, 32(1):63–77.
La Cascia, M., Sclaroff, M., and Athitso, S. (2000). Fast
reliable head tracking under varying illumination:
An ap-proach based on robust registration of texture
mapped 3d models. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 22(4):332–336.
Martinkauppi, B. (2002). Face Colour Under Varying Il-
lumination -Analysis And Applications. PhD thesis,
Department of Electrical and Information Engineering
and Infotech Oulu, University of Oulu.
McKenna, S., Raja, Y., and Gong, S. (1999). Tracking
colour objects using adaptive mixture models. Image
and Vision Computing, 17(3-4):225–231.
Sigal, L., Sclaroff, S., and Athitsos, V. (2004). Skin colour-
based video segmentation under time-varying illumi-
nation. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 26(7):862–877.
Soriano, M., Martinkauppi, B., Huovinen, S., and Laakso-
nen, M. (2000). Using the skin locus to cope with
changing illumination conditions in colour-based face
tracking. In IEEE Nordic Signal Processing Sympo-
sium.
Strring, M., Andersen, H. J., and Granum, E. (1999). Skin
colour detection under changing lighting conditions.
In 7th International Symposium on Intelligent Robotic
Systems.
Vapnik, V. (1995). The Nature of Statistical Learning The-
ory.
Yang, M., Kriegman, D., and Ahuja, N. (2002). Detecting
faces in images: A survey. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 24(1):34–58.
ON-LINE FACE TRACKING UNDER LARGE LIGHTING CONDITION VARIATIONS USING INCREMENTAL
LEARNING
643
