
EXPLOITING HUMAN BIPEDAL MOTION CONSTRAINTS
FOR 3D POSE RECOVERY FROM A SINGLE
UNCALIBRATED CAMERA
Paul Kuo, Thibault Ammar, Michal Lewandowski, Dimitrios Makris and Jean-Christophe Nebel
Digital Imaging Research Centre, Kingston University, London, U.K.
Keywords: 3D pose recovery, Orthographic projection, Pin-hole camera model, Camera auto-calibration, Biomechanics.
Abstract: A new method is proposed for recovering 3D human poses in video sequences taken from a single
uncalibrated camera. This is achieved by exploiting two important constraints observed from human bipedal
motion: coplanarity of body key points during the mid-stance position and the presence of a foot on the
ground – i.e. static foot - during most activities. Assuming 2D joint locations have been extracted from a
video sequence, the algorithm is able to perform camera auto-calibration on specific frames when the
human body adopts particular postures. Then, a simplified pin-hole camera model is used to perform 3D
pose reconstruction on the calibrated frames. Finally, the static foot constraint which is found in most
human bipedal motions is applied to infer body postures for non-calibrated frames. We compared our
method with (1) “orthographic reconstruction” method and (2) reconstruction using manually calibrated
data. The results validate the assumptions made for the simplified pin-hole camera model and reconstruction
results reveal a significant improvement over the orthographic reconstruction method.
1 INTRODUCTION
Recovery of 3D posture sequences provides
essential information for the analysis of human
behaviour and activity. Although computer vision
systems have been proposed, they either rely on
controlled environments involving several cameras
or are limited to specific human activities.
Therefore, they cannot be used in most real-life
applications, such as the detection of antisocial
behaviours from images captured from a CCTV
camera, where only data recorded by a single
uncalibrated camera are available. Consequently,
human pose recovery from a single uncalibrated
camera is still one of the major challenges facing the
computer vision community.
The goal of pose recovery is to localise a
person’s joints and limbs in either an image plan (2D
recovery) or a world space (3D recovery), which
usually results in the reconstruction of a human
skeleton. In this work, we concentrate on 3D pose
recovery. The success of pose recovery is measured
in terms of posture error,i.e. the average Euclidean
distance between corresponding joints of the
recovered and actual postures by aligning two bodies
with optimal scaling, translation, and rotation. This
metric reflects the real dissimilarity between two
postures.
In this paper, we propose a novel method for
estimating a 3D pose from 2D joint locations using a
single uncalibrated camera. Assuming 2D positions
of these key points have been extracted from a video
sequence, we are able to perform camera auto-
calibration for some key frames automatically
selected in the sequence (Kuo et al., 2007). This
exploits a human bipedal motion constraint that
certain body joints become coplanar within a motion
cycle. This provides sufficient knowledge for
reconstruction of a 3D figure in a world space using
a pin-hole camera model. In order to recover poses
for other frames, another human bipedal motion
constraint, i.e. the presence of a foot on the ground –
i.e. static foot - during most activities, is exploited to
propagate 3D posture reconstruction from one frame
to the next.
The structure of this paper is organised as
follows. After presenting relevant literature review,
we detail in Section 2 our pose recovery algorithm.
Then, experiments to validate our method with
quantitative results are given in Section 3. Finally,
conclusions and future work are addressed in
Section 4.
557
Kuo P., Ammar T., Lewandowski M., Makris D. and Nebel J. (2009).
EXPLOITING HUMAN BIPEDAL MOTION CONSTRAINTS FOR 3D POSE RECOVERY FROM A SINGLE UNCALIBRATED CAMERA .
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 557-564
DOI: 10.5220/0001821305570564
Copyright
c
SciTePress

1.1 Related Work
Since geometric camera calibration reveals the
relationship between the 3D space that is viewed by
the camera and its projection on the image plane, it
is a key for the reconstruction of a 3D articulated
structure. The common practice for calibrating
cameras is to obtain point correspondences between
a known calibration pattern and its projection on the
image (Tsai, 1987). Although such process is
straightforward, it is very often unpractical as
cameras often change position, their number may be
very large or physical access to them is impossible.
In order to deal with this issue, Taylor offered a pose
recovery method which does not require any camera
calibration (Taylor, 2000). He exploits an
orthographic projection model that assumes 3D
objects are very far away from the camera thus the
depth of their surface points are almost constant.
Although it has been widely used (Mori and Malki,
2002, Mori and Malki, 2006, Remondino and
Roditakis, 2003), as we shall see in our result
section, accuracy is compromised by such a strong
assumption. Inspired by Taylor’s work (Taylor,
2000), our method does not required any manual
camera calibration and relies on the location of 2D
image key points, i.e. joints, as an input. However, it
uses bipedal motion constraints to recover more
accurately 3D poses.
The extraction of 2D joint positions from an image
has been a very active field of research (Ren et al.,
2005, Kuo et al., 2008, Balan and Black, 2006,
Urtasun et al., 2006). Ren et al. extracts body
segments by exploiting parallelism and pairwise
constraints of the body parts (Ren et al., 2005). Kuo
et al. extended this approach by adding other image
cues, i.e. colour and motion, which are informative
regarding body part location (Kuo et al., 2008).
Others use a Wandering-Stable-Lost framework to
track 2D body parts/key points through the
sequences (Balan and Black, 2006, Urtasun et al.,
2006).
Most pose reconstruction methods rely either on
multiple cameras (Bhatia et al., 2004, Izo and
Grimson, 2007), and/or assume specific types of
activities (Bhatia et al. 2004, Elgammal and Lee,
2006, Tian et al., 2004, Lim et al., 2006, Ek et al.,
2008). Moreover, some of them require manual
initialisation of their 3D tracker (Balan and Black,
2006, Urtasun et al., 2006, Martinez-del-Rincon et
al., 2008). Therefore, all these constraints
dramatically limit the practical applications of those
systems.
Our approach exploits general constraints
imposed by human bipedal motion. They include the
presence of at least one foot on the ground during
most activities; this constraint has already been used
successfully in 2D body tracking (Martinez-del-
Rincon et al., 2008). These bipedal constraints are
much less restricting than assuming a specific type
of motions (e.g., walking). In this work, we use such
constraints for camera self-calibration from
observing human motion to derive 3D poses for key
frames (Kuo et al., 2007) and further infer 3D poses
between key frames.
2 METHODOLOGY
2.1 3D Human Pose Recovery
Our goal is to recover 3D human postures in video
sequences by exploiting human bipedal motion
constraints. We propose a 3D pose estimator which
generates possible 3D poses from 2D joint positions
in the input image sequence. Then the most proper
pose is selected by taking into account learned
human motion models. Figure 1 illustrates the flow
of our 3D human pose recovery. It requires an image
processing task of detection of “image key points”
related to postures i.e., 2D body joints, from the
video. The 3D pose estimator, which is based on
pin-hole projection, then transforms 2D images
points to a set of 3D poses in real world, using the
constraints of human bipedal motion. Based on the
motion models which are learnt from dynamics and
further constraints of human motion, the most likely
pose can be selected among the proposed 3D poses.
Because the task of obtaining key body points
from the image has been tackled in our previous
paper (Kuo et al., 2008) and a paper dealing with
pose selection is in preparation, in this work, we will
concentrate on the 3D pose estimator which covers
the pose reconstruction by exploiting human bipedal
motion constraints.
2.2 3D Pose Estimator
The 3D pose estimator generates a set of 3D pose
proposals from 2D joint positions based on the pin-
hole projection model. First, postures are estimated
automatically for a set of key frames where camera
auto-calibration can be performed. Then, the other
postures are recovered by propagating the
parameters of the pin-hole projection model
obtained for the key frames to other frames by
introducing a constraint of bipedal motion.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
558

Figure 1: 3D pose recovery pipeline.
The key frames are specific frames when the
human body adopts particular postures where five
points are coplanar. Using those points a coplanar
calibration model can be used to estimate the camera
parameters (Tsai, 1987).
Figure 2 shows an in-depth insight of the 3D pose
estimator. Firstly the sequence with extracted key
body points is used to perform “camera auto-
calibration” (see Section 2.2.1). This is an iterative
process to select the key frames and to estimate
calibration parameters, i.e. focal length and camera
relative position. This also generates a 3D coplanar
model representing the 3D configuration of the set
of coplanar body joints at key frames (Figure 3).
Secondly, the pin-hole projection model is
employed to reconstruct 3D postures for the
calibrated key frames. The projection line of each
key body point on the image can be established
using the estimated focal length. Their
corresponding 3D points can be located on the
projection lines according to the camera relative
position and the body model. The body model is a
3D skeletal representation of a human body (see
Figure 3) which consists of 15 joints: shoulders,
hips, shoulder centre, hip centre, elbows, hands,
knees, feet and a head. It is constructed from the
calibrated 3D coplanar model with known body
ratios. Since this problem is ill-constrained
(
32
ℜ→ℜ
), multiple postures are generated. A pose
selection mechanism is then required to extract the
correct posture. The pin-hole based reconstruction
will be detailed in Section 2.2.2.
Finally, to recover postures for non-key frames,
the bipedal constraint of the static foot is used.
Human biomechanics reveals that at any moment at
least one foot is in contact with the ground in most
types of bipedal motion. This static foot exists
because the body requires at least one limb to
support its weight. Motion is achieved by switching
weight support to the other foot. Both feet can only
be off ground for a short moment if any, e.g.
running. This static foot constraint can be exploited
for pose recovery, since knowledge of the 3D
posture at one frame also provides the 3D
coordinates of one foot in the next frame. Therefore,
postures can be propagated from the reconstructed
key frames to their neighbouring frames. The detail
of this posture propagation using a static foot will be
discussed in Section 2.2.3.
K
e
y
f
r
a
m
e
s
Parame
t
ers
Figure 2: Details of 3D pose estimator.
Figure 3: Body model (red) and key points of the coplanar
model (green circles).
2.2.1 Camera Auto-Calibration
In order to perform 3D pose reconstruction based on
pin-hole projection, it is necessary to estimate the
camera calibration parameters. In order to make this
task automatic, the camera model needs to be
simplified. We assume the principal axis goes
EXPLOITING HUMAN BIPEDAL MOTION CONSTRAINTS FOR 3D POSE RECOVERY FROM A SINGLE
UNCALIBRATED CAMERA
559

through the centre of the image and there is neither
lens distortion nor skew. The validity of these
assumptions will be accessed in our result section.
The required projection parameters are the focal
length and the camera relative position to the body.
They are estimated by using the camera auto-
calibration method proposed in (Kuo et al., 2007).
This can summarised as follows. It is based on
Tsai’s coplanar calibration method (Tsai, 1987)
where a set of 3D coplanar points and their projected
locations on the image plane are required. A study of
human biomechanics reveals that the shoulders and
hips are expected to be coplanar at some time during
a cycle of bipedal motion, i.e. mid-stance position.
As a result, key points on (but not limited to) the
shoulders and hips are suitable for coplanar
calibration. Therefore, the automatic identification
of the coplanar instances and the 3D structure of the
key points can achieve camera auto-calibration. The
core of this auto-calibration method lies on the
observation that a smaller variation of the focal
length estimates indicates the smaller error in
coplanarity of the key points and the 3D coplanar
model, which results in more accurate calibration.
Tsai’s coplanar calibration estimates the focal length
by solving an over-determined linear system, which
yields 10 estimates of the focal length. The variation
of these 10 estimates is used in (Kuo et al., 2007) to
reflect errors in coplanarity and 3D representation of
the key points. Therefore, the key frames and the
coplanar model (which is part of the body model)
can be selected by minimising standard deviation of
the focal length estimates through frames of the
sequence and coplanar model space. Apart from the
key frames and a coplanar model being identified,
focal length and the camera relative position to the
body in terms of rotation and translation parameters
are also estimated from this auto-calibration process.
Since the coplanar model has been identified, a body
model is built using the shoulder length, hip length
and spine length which are extracted from the
coplanar model to estimate the size of the limbs
(lower/upper arms/legs) and the head (Figure 3).
2.2.2 3D Human Body Reconstruction using
Pin-Hole Projection Model
The pin-hole projection model, as illustrated in
Figure 4, is employed for 3D pose reconstruction.
This method relies on the determination of the
projection line of each image point. Then, along the
projection line the corresponding 3D point needs to
be localised using the known distances between its
neighbouring points as a constraint. This can be
achieved using the parameters estimated from auto-
calibration, i.e., focal length, camera relative
position and the body model. Since the 3D positions
of shoulder and hip points were already estimated in
the calibration process – they form the required 3D
coplanar model - (see Section 2.2.1), only limbs
(upper/lower arms/legs) and the head need to be
reconstructed. Their positions are calculated piece-
wisely from the points of the coplanar model (i.e.,
shoulders or hips) towards the limbs’ distal ends, by
applying Equation (1).
0
)1(,1
=−−
−− tttt
LPP
(1)
0)(cos2
)1(,
2
1
2
1
2
=−+−
−−
−
ttt
ttt
LDDDD
θ
(2)
Where P
t-1
is a 3D body key point (e.g., the left
shoulder, P
l_shdr
, see Figure 4) whose coordinates are
already known, and P
t
is the point which is to be
reconstructed (e.g., the left elbow, P
l_elb
, see Figure
4). L
t,,(t-1)
is the expected segment length between
two successive key points.
P
t
and P
t-1
’s projection lines can be established
by connecting the optical centre, O, and their
corresponding image points, p
t
and p
t-1
. Since P
t
is
constrained on its projection line, its location can be
computed by using Equation (2) which considers the
trigonometry of the triangle
△
O- P
t-1
-P
t
. D
t
and D
t-1
denotes the distance of P
t
to O
and
P
t-1
to O;
θ is the
angle between these two projection lines (see Figure
4). Since D
t-1
, θ and L
t,(t-1)
are known, D
t
can be
solved to locate P
t
. As the problem is ill-constrained
(
32
ℜ→ℜ
), the quadric formulation of Equation (2)
gives us two P
t
locations. This is because it cannot
distinguish, from a 2D image point, whether the
corresponding 3D point is closer or further away
from the camera than its neighbouring point, unless
some depth information is provided. As a
consequence, a number of 2
10
poses will be
generated (5 coplanar points have been located
uniquely by the calibration). The pose selection (see
Figure 1) will then determine the most proper 3D
posture for this frame among these pose proposals.
To evaluate our reconstruction, in this paper, we
assume pose selection is a solved problem.
2.2.3 Reconstruction Propagation using
Static Foot Points
The propagation of 3D reconstruction relies on the
static foot constraint which is observed in most
bipedal motions where generally at least one foot
stays on the ground to support body weight.
Identification of static foot locations in a sequence is
the key to propagate the estimated postures from the
key frames to non-key frames. The 3D coordinates
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
560

Figure 4: Pin-hole projection model for 3D pose
reconstruction applied to the reconstruction of the left arm.
of a stationary key point identified in a previous
frame is used as the starting point of pin-hole pose
reconstruction for the current frame. Walking, as an
example, requires that one leg always stays on the
ground while the other is swinging and there is a
short period of “double support” during which the
legs exchange the motion. Therefore the posture can
be propagated continuously from one static foot to
the other via the “double support” period. This
posture propagation can also be used in motions
which contain “off-ground” moments (such as
running or dancing) where pose interpolation is
required to fill the temporal gaps.
The static foot can be identified effectively and
accurately by comparing speed of foot points
between consecutive frames. Equation 3 makes a tri-
nary decision (left foot, right foot or none) of the
static foot for the current frame I
t
by computing the
displacement of the left and right feet between the
previous and next frames, I
t-1
and I
t+1
. I
t-1
LF
(x, y),
I
t+1
LF
(x, y), I
t-1
RF
(x, y) and I
t+1
RF
(x, y) denote the
locations of the left and right foot points in the
previous and next frames and Euclidean distance is
used to compute the displacement between two 2D
points. If the displacement of the right foot is greater
than the left one, the left foot is determined as the
static foot (i.e., SF(t)= left foot) and vice versa,
provided the speed of the foot is below a threshold,
Thr.
),(),(),(),()(
1111
yxIyxIyxIyxItD
t
RF
t
RF
t
LF
t
LF
+−+−
−−−=
If (D(t)<0 && |I
t-1
LF
(x, y)- I
t+1
LF
(x, y)|<Thr)
SF(t) =left foot
else if (D(t)>0 && |
I
t-1
RF
(x, y)- I
t+1
RF
(x, y)|<Thr)
SF(t) = right foot
else
SF(t) = None
(3)
If a static foot is identified, the pin-hole
reconstruction (see Section 2.2.2) can be performed
for non-key frames. This is a recursive process that
propagates the postures from the key frames in both
forward and backward directions in time. In each
direction, we firstly reconstruct the frame next to the
key frames whose static foot 3D position has been
identified so that it can be used as a seed of the pin-
hole reconstruction for this frame. The
reconstruction starts from the static foot 3D point
and estimates the 3D positions of the keen and hip of
the same leg. It then estimates the 3D position of
another leg, and followed by the spin, shoulders,
head and arms. Once this frame is reconstructed, its
static foot position can be passed on to its adjacent
frame that will be reconstructed in the same manner.
Since there are multiple key frames within a given
sequence, a linear combination of the propagated
postures from each key frame is calculated to
generate the final one. Weights are introduced to
penalise postures which are temporally further away
from their key frames.
3 EXPERIMENTAL RESULTS
3.1 Dataset and Experimental Settings
The algorithm was tested on the HumanEva (HE)
dataset (
http://vision.cs.brown.edu/humaneva), which is
used as benchmark for pose recovery. It provides
motion capture and video data which were collected
synchronously. Therefore, motion capture data
provide 3D ground truth of human poses: since
cameras are calibrated, 3D data points can be
projected on the image plane so that 2D locations of
key body points in the sequences are available for
pose recovery algorithms. Moreover, a standard set
of error metrics is defined to evaluate pose
estimations (Sigal and Black, 2006).
To validate our proposed method, two other pose
recovery techniques are also evaluated:
Reconstruction using orthographic projection
(Taylor, 2000),which is one of the most popular 3D
pose recovery method for uncalibrated cameras, and
pin-hole reconstruction using the calibration data
and body model directly provided by the HE. In
order to validate the assumption made for our
simplified camera model, in the later case, we
neglect lens distortion and skew, and set the image
centre as the principal centre. To make an unbiased
comparison between these two methods and our
proposed method, all experiments are conducted
with known body ratio (this is obtained from the
HE) and known depth relations between pairs of key
EXPLOITING HUMAN BIPEDAL MOTION CONSTRAINTS FOR 3D POSE RECOVERY FROM A SINGLE
UNCALIBRATED CAMERA
561

points, i.e. front or back, as a substitute for the pose
selection.
A sequence of “walking in a circle”-- S2 Walking
(C1) in the HE-- is selected as a testing sequence.
Since the original sequence is quite long, only one
complete walking circle is used, i.e. frame 340 to
760. The sequence was chosen to include a variety
of walking postures, i.e. a complete circle, seen from
different distances and view angles.
3.1.1 Orthographic Reconstruction
This method proposed by Taylor (Taylor, 2000)
does not require calibration since it assumes the
object to be reconstructed is far away from the
camera so that the Z coordinates (the depth) are
almost constant for all the points on the object. Since
this method requires the user selects a suitable
scaling factor, it only recovers the posture (i.e.,
relative positions of the key body points), but not the
actual size of the human subject. Therefore,
Procrustes Analysis (Seber, 1984) is performed to
facilitate the comparison between the reconstructed
body and the motion capture data, which is our
ground truth. Procrustes Analysis determines a linear
transformation (translation, rotation, and scaling) of
the reconstructed body to best match to the ground
truth by minimising Root-Mean-Square error
(RMS). Reconstruction errors of this method are
showed in Figure 6 (blue) and Table 1 (first
column).
3.1.2 Pin-Hole Reconstruction using
Parameters Supplied from the Dataset
To validate the assumption of the simplified
calibration model used in the proposed method,
poses are reconstructed using the pin-hole projection
model with a number of parameters directly
provided from the HE dataset. These include camera
calibration parameters, i.e. focal length, camera
relative position to a key point of the subject (the
shoulder centre), subject’s body model and relative
depth information of adjacent points. Lens distortion
and skew are not considered, and it is assumed the
principal axis of the camera goes through the centre
of the image. As a result, the pin-hole reconstruction
can be seeded from the known shoulder centre.
Positions of the other key points are obtained by
using projection lines and by taking into account the
body model and relative depth information.
Procrustes Analysis is performed to allow
comparison with motion capture data. The results of
this method is showed in Figure 6 (red) and Table 1
(second column)
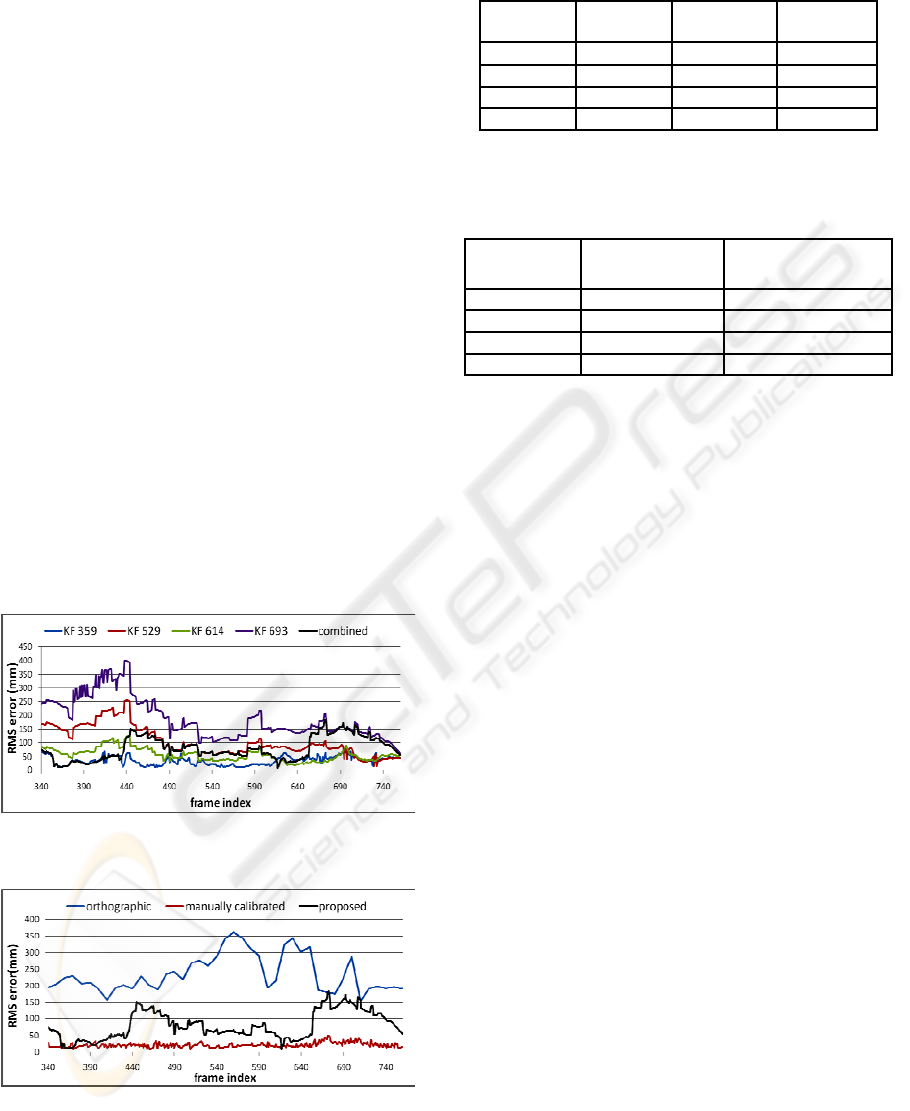
3.2 Evaluation of Pose Reconstruction
The auto-calibration process identified four key
frames, frame 359, 529, 614, 693, within the target
walking circle (See Figure 7 for original key frame
postures). Thus, their postures were estimated and
propagated to other frames using identified static
foot points. The final posture estimates are produced
by combining propagated poses produced by each
key frame as described in Section 2.2.3. Figure 5
shows the RMS errors of propagated postures from
each key frame and their combined postures.
Figure 6 and Table 1 show a comparison of our
proposed method with the reconstructions described
in Section 3.1.1 and 3.1.2. The result of the pose
estimation based on manual calibration (Section
3.1.2) produces an average error of 20.5 mm. This
validates the assumption of the simplified pin-hole
projection model used in our proposed method.
Also, since it is manually calibrated, it is considered
as the optimal result we could obtain in our method.
As shown in Figure 6, our proposed method (black)
clearly outperforms the orthographic reconstruction
(blue); the average error is reduced by two-third
(from 235.8 mm down to 79.5 mm, Table 1).
Statistical analysis in Table 1 also indicates our
method has reasonable accuracy (average error 79.5
mm) and is consistent (standard deviation is 41.7
mm). We also compare our results with the state-of-
the-art; (Husz et al., 2007) worked on similar
scenarios (single uncalibrated camera with
unspecified action) and an average error of 200 mm
was reported. Elgammal and Lee (2006) was able to
achieve 30 mm error on tracking joints in the same
sequence. However, their method is activity specific
(walking) and requires such motion to happen
cyclically. Further analysis of reconstruction of each
key frame and its posture propagation is shown in
Table 2. We notice the reconstruction and
propagation of the key frame 693 is significantly
worse than other key frames. Since the posture of
this key frame is approximately parallel to the image
plane (see Figure 7), it results in unreliable coplanar
calibration as shown in (Kuo et al., 2007).
Moreover, the reconstruction is further deteriorated
by lens distortion as the subject is positioned near
the border of the image in this frame.
Due to the limited space of the paper, Figure 7
illustrates only a subset of our reconstructed poses
against the ground truth. We show the reconstruction
of 4 key frames and other poses with a variety of
view angles and distances, including the difficult
cases where the subject is near the image border or
the posture is parallel to image plane.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
562
4 CONCLUSIONS
In this paper, we presented a novel 3D pose recovery
algorithm by exploiting human bipedal motion
constraints using images from a single uncalibrated
camera. The algorithm can estimate camera
calibration parameters from a number of frames (i.e.,
key frames) in the sequence automatically,
reconstruct the key frames’ postures using a
simplified pin-hole camera model and infer postures
for other frames. To achieve this, two constraints
observed from human bipedal motion were used.
One is the coplanarity of the body points in the mid-
stance position to perform camera auto-calibration
and the other refers to the static point of the foot that
allows pose propagation from one frame to next.
Our method was validated experimentally. Results
showed an accuracy of 8 cm, which is usually
sufficient to label poses for action recognition
applications.
We plan to use 2D feature detectors and trackers
to localise the joints on real video sequences to test
further our method against noisy feature locations.
We will also incorporate a pose selection module
which embeds human motion dynamics and
constraints to select the most plausible posture
among the generated 3D pose proposals.
Figure 5: RMS error of our proposed pose recovery
algorithm.
Figure 6: RMS errors of 3 pose reconstruction algorithms.
Table 1: Statistical results of 3 reconstruction algorithms.
error(mm)
ortho‐
graphic
manually
calibratedproposed
average 235.8 20.5 79.5
max. 363.1 50.0 182.8
min. 153.3 8.0 7.4
s.d. 57 6.9 41.7
Table 2: Statistical results of key frame reconstruction and
propagation.
keyframe
reconstruction
error(mm)
Averageerror(mm)
inpropagation
359 23.0 35.5
529 67.4 106.3
614 46.3 58.0
693 172.4 189.6
REFERENCES
P. Kuo, J.-C. Nebel and D. Makris. Camera Auto-
Calibration from Articulated Motion, AVSS: pp. 135-
140. 2007.
R.Y. Tsai, A versatile camera calibration technique for
high accuracy 3D machine vision metrology using off-
the-shelf TV cameras and lenses, IEEE Journal of
Robotics and Automation, vol. RA-3 pp323-343 Aug,
1987.
C. J. Taylor. Reconstruction of Articulated Objects from
Point Correspondences in a Single Image, CVPR: pp.
677-684. 2000.
G. Mori and J. Malki. Estimating Human Body
Configurations using Shape Context Matching, ECCV,
LNCS 2352, vol. 3, pp. 666–680. 2002
G. Mori and J. Malki. Recovering 3D Human Body
Configurations Using Shape Contexts, IEEE Tran.
PAMI, vol.28. pp. 1052-1062. 2006
F. Remondino and A. Roditakis. 3D Reconstruction of
Human Skeleton from Single Images or Monocular
Video Sequences. 25th Pattern Recognition
Symposium, Lecture Notes in Computer Science,
Springer, DAGM 03, pp. 100-107. 2003
X. Ren, A.C. Berg and J. Malik. Recovering human body
configurations using pairwise constraints. ICCV: pp.
824-831. 2005
P. Kuo, D. Makris, N. Megherbi and J.-C. Nebel.
Integration of Local Image Cues for Probabilistic 2D
Pose Recovery", 4th International Symposium on
Visual Computing (ISVC), Springer-Verlag. 2008
A.O. Balan and M.J. Black. An Adaptive Appearance
Model Approach for Model-based Articulated Object
Tracking. CVPR: pp. 758-765. 2006.
R. Urtasun, D.J. Fleet and P. Fua. 3D People Tracking
with Gaussian Process Dynamical Models. CVPR:
pp.238-245. 2006.
EXPLOITING HUMAN BIPEDAL MOTION CONSTRAINTS FOR 3D POSE RECOVERY FROM A SINGLE
UNCALIBRATED CAMERA
563

Frame 359 Frame 529 Frame 614 Frame 693 Frame 393 Frame 450 Frame 555 Frame 653 Frame 742
(rms =23.0) (rms =67.4) (rms =46.3) (rms =172.4) (rms =21.2) (rms =
143.3) (rms = 62.6) (rms = 54.7) (rms = 92.9)
Figure 7: Reconstruction results; first row: frame index; second row: associated posture error, (Root-Mean-Square error in
mm); third row: original images; forth row: reconstructed (solid) and ground truth (dotted) postures observed from the
original viewpoint; fifth row: reconstructions observed from a novel viewpoint. The first 4 images are the key frames;
Frame 693 and 450 show poor reconstructions where the subject is located near the borders of the image.
S. Bhatia, L. Sigal, M. Isard and M.J. Black. 3D Human
Limb Detection using Space Carving and Multi-View
Eigen Models. CVPR: pp. 17-24. 2004.
T. Izo and W.E.L. Grimson. Simultaneous pose recovery
and camera registration from multiple views of a
walking person. Journal of Image and Vision
Computing: pp. 342-351. 2007.
A. Elgammal and C.S. Lee. Body Pose Tracking from
Uncalibrated Camera using Supervised Manifold
Learning. NIPS. 2006.
T. P. Tian, R. Li and S. Sclaroff. Articulated Pose
Estimation in a Learned Smooth Space of Feasible
Solutions. CVPR: pp: 50-57. 2005.
H. Lim, V. I. Morariu, O.I. Camps, M. Sznaier. Dynamic
Appearance Modeling for Human Tracking. CVPR: pp:
751-757. 2006.
C.H. Ek, P.H.S. Torr and N.D. Lawrence. Gaussian
Process Latent Variable Models for Human Pose
Estimation. LNCS 4892. Springer. pp: 132-143. 2008.
J. Martinez-del-Rincon, J.-C. Nebel, D. Makris, C. Orrite-
Urunuela. Tracking Human Body Parts Using Particle
Filters Constrained by Human Biomechanics. BMVC
2008.
http://vision.cs.brown.edu/humaneva. HumanEVA dataset,
Brown University.
L. Sigal and M. J. Black, HumanEva: Synchronized video
and motion capture dataset for evaluation of
articulated human motion, Tech. Report CS0608,
Brown Univ. 2006.
G. A. F. Seber. Multivariate Observations, Wiley, 1984.
Z. Husz, A. Wallace and P. Green, Evaluation of a
Hierarchical Partitioned Particle Filter with Action
Primitives. CVPR 2
nd
workshop on EHuM
2
. 2007
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
564
