
METHODS AND TOOLS FOR MODELLING REASONING
IN DIAGNOSTIC SYSTEMS
Alexander P. Eremeev and Vadim N. Vagin
Moscow Power Engineering Institute (Technical University), Krasnokazarmennaya 14, 111250, Moscow, Russia
Keywords: Artificial intelligence, Decision support, Expert diagnostic system, Assumption-based truth maintenance
system, Case-based reasoning, Knowledge base.
Abstract: The methods of case-based reasoning for a solution of problems of real-time diagnostics and forecasting in
intelligent decision support systems (IDSS) is considered. Special attention is drawn to a case library
structure for real-time IDSS and an application of this reasoning type for diagnostics of complex object
states. The problem of finding the best current measurement points in model-based device diagnostics with
using Assumption-based Truth Maintenance Systems (ATMS) is viewed. The new heuristic approaches of
current measurement point choosing on the basis of supporting and inconsistent environments are presented.
This work was supported by the Russian Foundation for Basic Research (projects No 08-01-00437 and
No 08-07-00212).
1 INTRODUCTION
The problem of human reasoning simulating (so
called “common sense” reasoning) in artificial
intelligence systems and especially in intelligent
decision support systems (IDSS) is very actual
nowadays (Vagin, 2007). That is why special
attention is turned to case-based reasoning methods
and heuristic methods of obtaining the effective
measurement in diagnostic systems on the basis of
ATMS. The precedents (cases) can be used in
various applications of artificial intelligence (AI)
and for solving various problems, e.g., for
diagnostics and forecasting or for machine learning.
At first we consider case-based reasoning (CBR)
methods including four main stages that form a
CBR-cycle and the application of CBR for
diagnostics of complex object states. Then model-
based diagnostics on the basis of ATMS and
heuristic methods of choosing a measurement point
in a diagnosed device are viewed. And finally
modeling results of the best measurement point
choosing for the 9-bit parity checker are given.
2 CASE-BASED REASONING
Case-based reasoning is an approach that allows to
solve a new problem using or adapting a solution of
a similar well-known problem (Eremeev, 2006). As
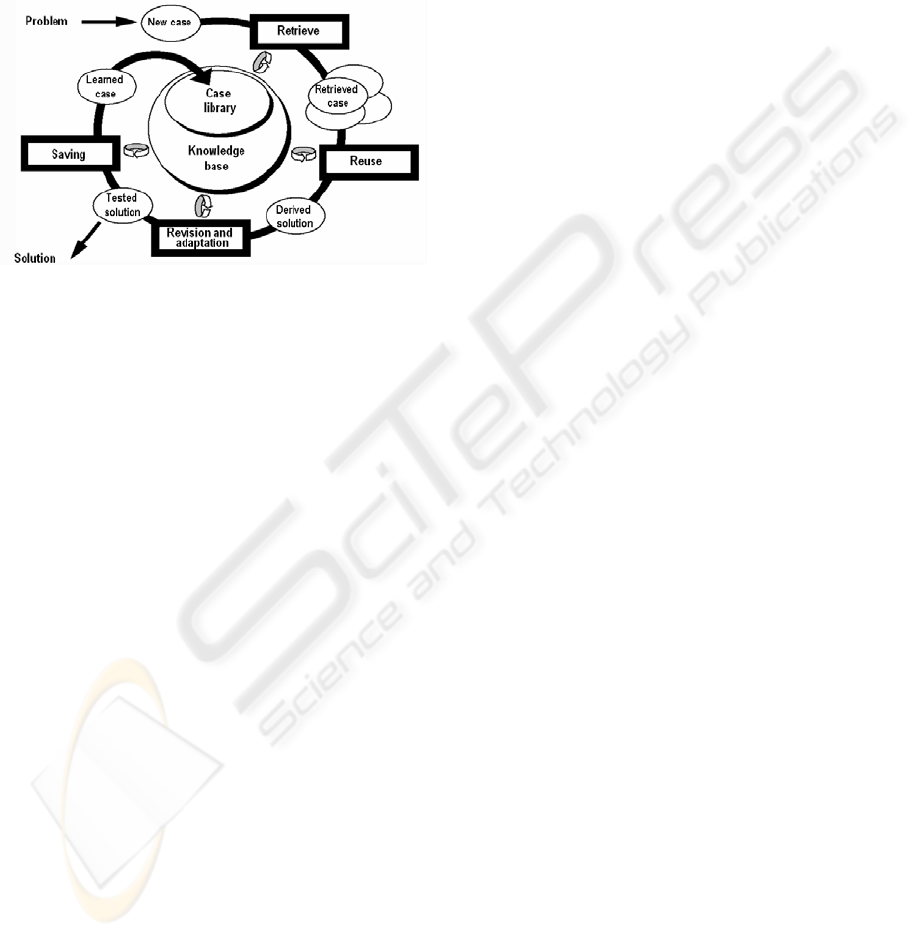
a rule, case-based reasoning methods include four
main stages that form a CBR-cycle, the structure of
which is represented in figure 1.
The main stages of CBR-cycle are the following
(Aamodt, 1994; Eremeev, 2007).
• Retrieving the closest (most similar) case (or
cases) for the situation from the case library;
• Using the retrieved case (precedent) for solving
the current problem;
• If necessary, reconsidering and adaptation of the
obtained result in accordance with the current
problem;
• Saving the newly made solution as part of a new
case.
It is necessary to take into account that a solution
on the basis of cases may not attain the goal for the
current situation, e.g., in the absence of a similar
(analogous) case in the case library. This problem
can be solved if one presupposes in the CBR-cycle
the possibility to update the case library in the
reasoning process (inference). A more powerful (in
detecting new facts or new information) method of
reasoning by analogy is means of updating case
libraries.
Use of the mechanism of cases for IDSS of real
time (RT IDSS) consists in issuing the decision to
the operator (DMP – Decision Making Person) for
271
P. Eremeev A. and N. Vagin V. (2009).
METHODS AND TOOLS FOR MODELLING REASONING IN DIAGNOSTIC SYSTEMS.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
271-276
DOI: 10.5220/0001832902710276
Copyright
c
SciTePress
the current situation on the basis of cases which are
contained in a system. As a rule, the last stage in a
CBR-cycle is excluded and performed by an expert
(DMP) because the case library should contain only
reliable information confirmed by an expert.
Reconsidering and adaptation of the taken decision
is required seldom because the same object
(subsystem) is considered.
Figure 1: CBR-cycle.
The modified CBR-cycle for RT IDSS includes
the following stages:
• Retrieving the closest (most similar) case (or
cases) for the situation from the case library;
• Using the retrieved case (precedent) for solving
the current problem.
• Case-based reasoning for IDSS consists in
definition of similarity degree of the current
situation with cases from case library. For
definition of similarity degree, the nearest
neighbor algorithm (k-nearest neighbor algorithm)
is used.
There was built the structure of case library for
RT IDSS on the basis of non-classical logics for
monitoring and control of complex objects like
power units.
The case library for RT IDSS should join in itself
the cases concerning a particular subsystem of a
complex object, and also contain the information on
each parameter which is used for the description of
cases (parameter type and range). Besides, the case
library should include such adjustments, as:
• the significance of a parameter;
• a threshold value of similarity;
• a value which limits quantity of considered cases.
It is necessary to emphasize, that the case library
can be formed on the basis of:
• the experience, accumulated by an expert;
• analysis of the system archive;
• analysis of emergencies;
• operative instructions;
• technological requirements.
The case library can be included in the structure
of the knowledge base of RT IDSS or act as a
separate component of the system.
3 APPLICATION OF
CASE-BASED REASONING
FOR DIAGNOSTICS OF
COMPLEX OBJECT STATES
As a complex object, we shall understand an object
which has a complex architecture with various
interrelations, with a lot of controllable and operated
parameters and small time for acceptance of
operating influences. As a rule, such complex
objects like the power unit are subdivided into
technological subsystems and can function in
various modes (in regular, emergency, etc.).
For the description of such complex object and
its subsystems, a set of parameters is used. The state
of an object is characterized by a set of concrete
values of parameters.
In the operative mode, reading of parameter
values from sensors for the whole object is made by
the system of controllers with an interval at 4
seconds. For this time interval, it is necessary to give
out to the DMP (operator) the diagnosis and the
recommendation on the developed situation.
Diagnosing and detection of operating influences
is carried out on the basis of expert knowledge,
technological requirements and operative
instructions. The developed software (Case Library
Constructor – CLC) can be applied to the decision of
the specified problems.
Basic components of CLC are:
• module for storage and loadings case libraries and
for data import;
• a subsystem of visualization for browsing the
structure of case libraries;
• a subsystem of editing and adjustment of case
libraries;
• a module of new cases check;
• a subsystem of case library testing and case-based
reasoning.
CLC was implemented in Borland C++ Builder
6.0 for Windows NT/2000/XP.
Implementation of case libraries with use of
CLC for systems of expert diagnosing is
subdivided
into the following main stages:
ICEIS 2009 - International Conference on Enterprise Information Systems
272

• Creation of case libraries for subsystems of
complex object;
• Adjustment of the created case libraries;
• Addition of cases in case libraries;
• Check of the added cases;
• Testing of the filled case libraries with using case-
based reasoning;
• Reservation of the created case libraries for their
subsequent transfer to operative maintenance.
This tool was applied in the prototype of a RT
IDSS for monitoring and control of complex objects
like power units on an example of a pressurizer in
pressurized water reactor (PWR) of the atomic
power station (Eremeev, 2008).
4 MODEL-BASED DIAGNOSTICS
The generalized problem of diagnostics can be
formulated as follows. There is a device exhibiting
an incorrect behaviour. The device will consist of
components, one or several of which are not
working properly what is the reason of incorrect
behaviour. There is a structure of connections
between components and a possibility to get
measurements on their inputs and outputs. It is
necessary to determine what of components are
faulty with minimal resource expenses.
At present two main approaches to a solution of
the given problem are viewed (Clancey, 1985; de
Kleer, 1987; Forbus, 1993).
The first approach is heuristic diagnostics. The
base of this approach is the knowledge extraction
from an expert and building fault determining rules
in the form of "symptoms → faults".
Because this approach suffers from a rigid
dependence on a device structure and difficulties
using the knowledge bases for other diagnostic
problems we use the second approach – so called
model-based diagnostics. This approach is based on
the knowledge of device component functionality.
The model of a device is a description of its
physical structure, plus the models for each of its
components. A compound component is a
generalized notion including simple components,
processes and even logical inference stages.
Model-based diagnosis process is the comparison
of predicted device behaviour with its observed
behaviour.
It is supposed, that the model is correct, and all
differences between device behaviour and a device
model indicate availability of broken components.
Main advantages of the model-based approach:
• diagnosing the multiple faults;
• unexpected fault recognition;
• a precision of a component model description does
not depend on the expert experience;
• a possibility of new device diagnosing;
• multiple using the models;
• detailed explanations.
5 ASSUMPTION-BASED TRUTH
MAINTENANCE SYSTEMS
For building a prognosis network, a component
behaviour model, finding minimal conflicts
characterizing mismatch of observations with
prognoses and candidates for a fault, it is efficient to
use possibilities given by ATMS (de Kleer, 1986;
Vagin, 2008).
The truth maintenance systems (TMS) are the
systems dealing with the support of coherence in
databases. They save the assertions transmitted to
them by a problem solver and are responsible for
maintaining their consistency. Each assertion has the
justification describing what kind of premises and
assumptions this justification was obtained. The
environment is a set of assumption.
The inference of an inconsistency characterizes
assumption incompatibility within the
presuppositions of which this conclusion was made.
Also there is introduced the environment set which
contains some inconsistency (de Kleer, 1986). The
sets of inconsistency environments E
1,
E
2
, ..., E
m
are
Nogood = {E
1
, E
2
, ..., E
m
). A consistent ATMS
environment is not Nogood.
There are the following correspondences
between ATMS and the model-based diagnosis
approach:
• ATMS premises – an observed device behaviour;
• ATMS assumptions – components of a device;
• inferred ATMS nodes – predictions of an
diagnostic system;
• Nogood – the difference between predicted and
observed device behaviour.
6 THE CURRENT
MEASUREMENT POINT
DETERMINATION
One of the key aspects of the model-based fault
search algorithm is to determine the optimal current
measurement in a diagnosed device. Efficiency of
METHODS AND TOOLS FOR MODELLING REASONING IN DIAGNOSTIC SYSTEMS
273

the current measurement choosing allows essentially
reducing a decision search space while the
inefficiency of choice will increase an operating
time, the space of a searching algorithm, and also
require additional resource spends to implement a
measurement.
The best measurement point in a diagnosed
device is a place (point) of measuring a value giving
the largest information promoting the detection of a
set of fault components at minimal resource
spending.
One of the best procedures for reducing resource
expenses is to produce the measuring giving the
maximal information concerning predictions made
on the basis of the current information on a system.
6.1 Heuristic Methods of Choosing
a Measurement Point
The purpose of the best choosing a measurement
point is to derive the maximal component state
information. After each measuring there is a
confirmation or refutation of prediction values in a
point of measurement. So, it is possible to use the
following aspects:
• Knowledge about environments that support
predicted values in the measurement points which
can be confirmed or refuted.
• Knowledge about inconsistent environments.
• Knowledge about coincided assumptions of the
inconsistent environments.
6.2 Knowledge about Supporting
Environments
The diagnostic procedure constructs predictions of
values for each device point with the list of
environments in which the given prediction is held.
The list of environments represents assumption sets
about correctness of corresponding device
components. As we are interested with a
measurement point with the greatest information on
failure, a point is selected from a quantity of
assumptions. Let’s introduce the function Quan(x),
by which we will designate the information quantity
obtained at measuring values in the point x. The
points with the greatest value of this function have
the greatest priority of a choice. We will call the
given method of choosing a measurement points as
SHE (Supporting Environment Heuristics).
6.3 Knowledge about the Sets
of Inconsistent Environment
As a result of each measurement there is a
confirmation or refutation of some prediction. The
environments E
1
, E
2
, ..., E
m
of refuted prediction
form the set Nogood = {E
1
, E
2
, ..., E
m
}. It can be
used for directional searching for more precise
definition what kind of components from Nogood is
broken.
Obviously the more of the components from
Nogood are specified by measuring a value in some
device point the more the information about which
components of Nogood are broken will be obtained.
Designate an environment set as Envs (x). For using
this possibility, it is necessary to take the
intersection of each environment from Envs(x) with
each set from Nogood:
Envs(x) ∩ Nogood = {A ∩ B: A ∈ Envs(x), B ∈
Nogood}.
Points with the greatest value of a variety of the
function Quan(x) have the greatest priority of a
choice. We will call the given method of choosing a
measuring point as SIEH (Supporting and
Inconsistent Environment Heuristics).
6.4 Knowledge about Coincided
Assumptions of the Inconsistent
Environments
During diagnostics of faulty devices as a result of
confirmations and refutations of some predictions
there is a modification of a set of inconsistent
environments Nogood.
In each component set from Nogood one or more
components are broken what was a reason of
including a supporting set into the inconsistent
environments Nogood. Taking the intersection of all
sets of the inconsistent environments, we receive a
set of components which enter into each of them, so
their fault can be a reason explaining an
inconsistence of each set holding in Nogood. Thus,
we obtain the list of components a state of which is
recommended to test first of all, i.e. the most
probable candidates on faultiness.
The set intersection of inconsistent environments
is expressed by the following equation:
∩
NogoodE
i
i
EodSingleNogo
∈
=
.
If SingleNogood = ∅, it means that there are
some disconnected faults. In this case the given
approach is inapplicable and it is necessary to define
ICEIS 2009 - International Conference on Enterprise Information Systems
274

more precisely the further information by any other
methods.
After obtaining a set SingleNogood
≠
∅, on the
base of environments of value predictions in device
points it is necessary to select those measurement
points that allow to effectively test components to be
faulted from SingleNogood.
For this purpose we will work with the sets
obtained as a result of an intersection of each
environment from Envs(x) with SingleNogood:
Envs(x) ∩ SingleNogood = {J ∩ SingleNogood: J ∈
Envs{x)}.
The following versions are possible:
a) ∃ J ∈ Envs(x): J ≡ SingleNogood. One of
environments of the value prediction in the point
x coincides with the set SingleNogood. The given
version allows to test faulty components from the
set SingleNogood most effectively so this
measurement point x is selected with the most
priority.
b) ∃ J ∈ Envs(x): |J ∩ SingleNogood| < |SingleNog
ood|. The cardinality of SingleNogood is more
than the cardinality of a set obtaining as a result
of an intersection SingleNogood with a set from
Envs(x). We evaluate this version as
||max
)(
odSingleNogoJ
xEnvsJ
∩
∈
, i.e. the more of
components from SingleNogood are intersected
with any environment from Envs(x), the more
priority of a choice of the given measurement
point for the observation.
c) ∃ J ∈ Envs(x): SingleNogood
⊂
J. The
SingleNogood includes in a set from Envs(x). We
evaluate this version as
|)||(|min
)(
odSingleNogoJ
xEnvsJ
−
∈
, i.e. the less a
difference between SingleNogood and Envs(x),
the more priority of a choice of the given
measurement point for the current observation.
d) ∀ J ∈ Envs(x):J ∩ SingleNogood = ∅, i.e. no one
of the most probable faulty candidates includes
in environments Envs(x) supporting predictions
at the point x. We evaluate this version as the
least priority choice, i.e. 0 in the numerical
equivalent.
Also to the version D there are referred other
methods of definition of current measurement point
priorities which happen when SingleNogood = ∅.
Thus, in the estimations of a choice priority a
numerical value returned as a result of call of other
method is accepted. We call it by ResultD(x).
At appearance of the greater priority choosing
between versions B and C, heuristically we accept
the version B as at this choice the refinement of
faulty candidates is produced better.
Note for various supporting sets of the same
Envs(x), the availability of both the version B and
the version C is also possible. In this case, as a
resulting estimation for the given Envs(x) the version
B is also accepted.
We will call the method of choosing the place
where reading is taken by the heuristics based on the
set of supporting and coinciding assumptions of
inconsistent environments as SCAIEH (Supporting
and Coinciding Assumptions of Inconsistent
Environment Heuristics).
The developed methods of heuristic choice of the
best current measurement point are recommended to
use for devices with a great quantity of components
as quality of guidelines directly depends on the
quantitative difference of environments.
7 PRACTICAL RESULTS
Let's test the developed methods of the best
measurement point choosing for the 9-bit parity
checker (Frohlich, 1998).
For each experiment one of device components
is supposed working incorrectly what is exhibited in
a value on its output opposite predicted. A
consequence of the incorrect component work is
changing of outputs of those components which
produce the results depending on values on the
output of a faulty component. These changed results
of component operations are transmitted to
appropriate inquiries of a diagnostic system.
In figure 2 the quantity of the stages required to
each method for fault localization is shown. A
method stage is a measurement point choosing. The
smaller the quantity of method stages, the faster a
fault is localized.
From the obtained results one can see that the
method efficiency for different fault components is
various and hardly depends on the device structure.
Let's estimate the method efficiency. The device
is consists of 46 components. The output values of
45 components are unknown (a value on the output
of Nor5 is transmitted to the diagnostic system with
input data together). So, the maximal stage quantity
necessary for a fault definition is equal 45. Let's
accept 45 stages as 100 %. For each experiment it is
computed on how many percents each of the
developed methods is more effective than exhaustive
search of all values. Then define the average value
of results. The evaluated results are represented in
table 1.
METHODS AND TOOLS FOR MODELLING REASONING IN DIAGNOSTIC SYSTEMS
275

Figure 2: The quantity of the stages required to each
method.
Table 1: Evaluated results.
The method SEH SIEH SCAIEH
On how many percents
the method is more effective, %
30,79 63,17 68,65
From table 1 one can see that the greatest
efficiency of current measurement point choosing
has the heuristic method based on the knowledge
about coincided assumptions of the inconsistent
environments SCAIEH.
8 CONCLUSIONS
The method of case-based reasoning was considered
from the aspect of its application in modern IDSS
and RT IDSS, in particular, for a solution of
problems of real-time diagnostics and forecasting.
The CBR-cycle is viewed and its modification for
application in RT IDSS is offered. The k-nearest
neighbor algorithm for definition of similarity
degree of a current situation with cases from a case
library is supposed. Note that elements of case-based
reasoning may be used successfully in analogy-
based reasoning methods, i.e., these methods
successfully compliment each other and their
integration in IDSS is very promising.
Also the heuristic methods of finding the best
current measurement point based on environments
of device components work predictions are
presented.
Practical experiments have confirmed the
greatest efficiency of current measurement point
choosing for the heuristic method based on the
knowledge about coincided assumptions of the
inconsistent environments SCAIEH.
Advantages of heuristic methods of the best
current measurement point choosing is the simplicity
of evaluations and lack of necessity to take into
consideration the internal structure interconnections
between components of a device.
REFERENCES
Vagin V.N., Yeremeyev A.P., 2007. Modeling Human
Reasoning in Intelligent Decision Support Systems //
Proc. of the Ninth International Conference on
Enterprise Information Systems. Volume AIDSS.
Funchal, Madeira, Portugal, June 12-16, INSTICC,
pp.277-282.
Eremeev, A., Varshavsky, P., 2006. Analogous Reasoning
and Case-Based Reasoning for Intelligent Decision
Support Systems // International Journal
INFORMATION Theories & Applications (ITHEA),
vol. 13 № 4, pp. 316-324.
Aamodt, E., 1994. Plaza “Case-Based Reasoning:
Foundational Issues, Methodological Variations, and
System Approaches” // AI Communications, No. 7.
Eremeev, A., Varshavsky, P., 2007. Application of Case-
based Reasoning for Intelligent Decision Support
Systems // Proceedings of the XIII
th
International
Conference “Knowledge-Dialogue-Solution” – Varna,
vol. 1, pp. 163-169.
Eremeev, A., Varshavsky, P., 2008. Case-based Reasoning
Method for Real-time Expert Diagnostics Systems //
International Journal “Information Theories &
Applications”, Volume 15, Number 2, pp. 119-125.
Clancey W., 1985. Heuristic Classification. // Artificial
Intelligence, 25(3), pp. 289-350.
de Kleer, J. and Williams, B.C., 1987. Diagnosing
Multiple Faults. // Artificial Intelligence, v.32, pp. 97-
130.
Forbus K.D., de Kleer, J., 1993. Building Problem Solver.
// A Bradford Book, The MIT Press, Cambridge,
Massachusetts, London, England.
de Kleer J., 1986. An Assumption-based TMS. // Artificial
Intelligence, v.28, p.127-162.
Vagin V.N., Golovina E.Ju., Zagoryanskaya A.A., Fomina
M.V., 2008. Exact and Plausible Inference in
Intelligent Systems. 2
nd
edition. // Vagin V.N.,
Pospelov D.A. (eds). M.: Fizmatlit, – 710 p. (in
Russian).
Frohlich P., 1998. DRUM-II Efficient Model-based
Diagnosis of Technical Systems. //PhD thesis,
University of Hannover.
ICEIS 2009 - International Conference on Enterprise Information Systems
276
