
INCREMENTAL MAINTENANCE OF ONTOLOGIES BASED
ON BIPARTITE GRAPH MATCHING
Preetpal Singh and Kalpdrum Passi
Dept. of Math and Computer Science, Laurentian University, 935 Ramsey Lake Rd., Sudbury ON, Canada
Keywords: Semantic matching, Ontology structure, Ontology mapping, Data integration, Weighted bipartite graphs,
Max- weighted matching, Hungarian algorithm.
Abstract: Today’s Information Society demands complete access to available information, which is often
heterogeneous and distributed. A key challenge in building the Semantic Web is integrating heterogeneous
data sources. This paper presents an incremental algorithm for maintaining integration in evolving
ontologies. For example, an increased number of smaller, task oriented ontologies, are emerging across the
Bioinformatics domain to represent domain knowledge; integrating these heterogeneous ontologies is
crucial for applications utilizing multiple ontologies. Most ontologies share a core of common knowledge
allowing them to communicate, but no single ontology contains complete domain knowledge. Recent papers
examined integrating ontologies using bipartite graph matching techniques. However, they do not address
the issue of incrementally maintaining the matching in evolving ontologies. In this paper we present an
incremental algorithm, OntoMaintain, which incrementally calculates the perfect matching among evolving
ontologies and simultaneously updates the labels of the concepts of ontologies. We show that our algorithm
has a complexity of O(n
2
) compared to complexity O(n
3
) of traditional matching algorithms. Experimental
results prove that our algorithm maintains the correctness of a ‘brute force method’ while significantly
reducing the time needed to find a perfect matching in evolving ontologies.
1 INTRODUCTION
Information today is dispersed in a variety of
disparate sources like public or proprietary
databases, books, journals, scientific publications
and national archives. A significant amount of this
data exists in heterogeneous format. Unfortunately
analysts and scientists are not able to identify and
exploit this information easily because of the variety
of semantics, interfaces and data formats used by the
underlying data sources (Reichhardt, 1999).
Semantic heterogeneity, also referred to as
conceptual heterogeneity and logical mismatch,
underlines the differences in modelling the same
domain of interest. Fundamental to resolving
semantic and organizational differences is the task of
matching ‘semantically heterogeneous data’.
Ontologies are an important paradigm for
managing the exponential growth of valuable data
generated by new technologies (Gruber, 1993).
Ontologies model the structure of data in terms of
classes and their attributes; they also represent the
semantics of data in the form of axioms, such as
inheritance relationships. These semantics explain
the relationship between structure and data in
different ontologies, to create a consistent integrated
ontology. However, existing integration approaches
(Mowbray and Zahavi, 1995), (Paolucci, et. al.,
2002), (Pinto and Martins, 2000) result in a static
ontology, which is hard to evolve as the core sub-
ontologies evolve and expand.
A primary task in designing a data integration
method is, establishing a mapping scheme between
the data sources; mappings represent semantics of
relationships and are used to create an integrated
ontology (Doan, et. al., 2002).
Our mapping scheme represents concepts of
ontology as vertices of a bipartite graph (Melnik, et.
al., 2002); it then invokes a bipartite graph matching
algorithm (Bellur and Kulkarni, 2007) to find a
perfect matching between these vertices.
Furthermore, we use the semantics of ontologies, to
create a coherent and consistent integrated ontology.
In this paper we propose an incremental
algorithm, OntoMaintain, based on the concept of
weighted bipartite graph matching. Our algorithm
incrementally computes the new perfect matching
444
Singh P. and Passi K.
INCREMENTAL MAINTENANCE OF ONTOLOGIES BASED ON BIPARTITE GRAPH MATCHING.
DOI: 10.5220/0001843904440449
In Proceedings of the Fifth International Conference on Web Information Systems and Technologies (WEBIST 2009), page
ISBN: 978-989-8111-81-4
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
between ontologies and updates the labels of vertices
as a new pair of vertices are added to the ontology.
Experimental results prove that our algorithm
maintains the accuracy of the “brute force” method
and significantly reduces the computation time in
finding the perfect matching of the extended
ontology O’. Our algorithm results in a time
complexity of
O(n
2
) compared to complexity O(n
3
) of
running the Hungarian algorithm (Kuhn, 1955).
2 RELATED WORK
In order to accommodate both semantic and
schematic differences between heterogeneous data
sources, it is crucial to integrate ontologies across
various knowledge domains such as anatomy, drug
and disease ontology in biomedical domains. A good
example is the Gene Ontology (GO). GO provides a
consistent description of genes in different
biological databases. Each term in GO has a unique
numerical identifier and a name; terms are further
assigned to an ontology like molecular function,
cellular component or biological process. Past
publications like OASIS (Song et. al., 2006) have
cited GO in their proposed matching system.
GO represents two forms of relationships: is_a
and part_of relationships. The is_a relationship
represents a simple class subclass relationship,
where A is_a B means that A is a subclass of B. The
part_of relation is slightly more complex; C part_of
D means that whenever C is present, it is always a
part of D, but C does not always have to be present.
An example would be nucleus part_of cell; nuclei
are always part of a cell, but not all cells have nuclei.
(Bellur and Kulkarni, 2007) propose an
improved version of semantic matchmaking
algorithm by (Paolucci, et al., 2002) to dynamically
discover and invoke a web service. They use the
Hungarian algorithm (Kuhn, 1955) to compute a
complete matching of a bipartite graph but minimize
the maximum weighted edge of graph to get an
optimal matching; this optimization criterion is
different from the Hungarian algorithm.
None of the works cited above discusses the
issue of maintaining mappings in evolving
ontologies; how to calculate a perfect matching
incrementally, every time new vertices are added to
the graph?
3 ONTOLOGY MAPPING
3.1 Similarity Measures
By comparing terms of ontologies, we first calculate
the similarity values between them, based on certain
metrics; each metric establishes a value based on
certain characteristics. Similarity values are in the
range [0, 1]. Larger the value, more similar the two
terms are.
Linguistic Similarity. Is based on term names. A
string match algorithm is used to match the names.
Definition Similarity. Certain terms in the ontology
database have definitions attached; a text
classification algorithm compares two definitions
and calculates a similarity value between two terms.
Structure Similarity. Neighbours of a term are
parents and children of the node; probability of a
term being similar to another is high if neighbours of
both terms are matched.
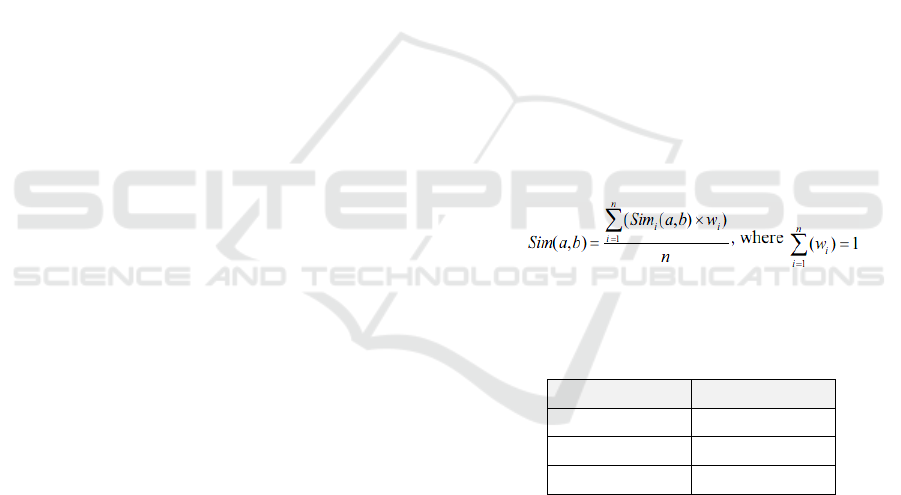
Based on the above three metrics, a similarity
chart is computed. If we have n similarity charts,
each of which has similarity values Sim
i
(a, b), i =
1..n, for any pair of elements (a, b); the overall
similarity for each pair (a, b) is calculated as:
Higher the weight w
i
,
more is its importance and
preference.
Table 1: Match according to similarity values.
Value Range Match
0.50 – 1.00 Exact
0.25 – 0.50 Subsumption
0.25 – 0.00 Conditional
3.2 The Gene Ontology
The Gene Ontology is a well known web based bio-
ontology; an open source of bioinformatics
knowledge. We will use two key GO ontologies;
cellular component and molecular function as
examples to explain how the Match conditions
mentioned in Table 1 are assigned.
The cellular component and molecular function
ontologies are each represented as a directed acylic
graph or DAG. Relationships between any two
concepts in a DAG are depicted by semantic edges.
INCREMENTAL MAINTENANCE OF ONTOLOGIES BASED ON BIPARTITE GRAPH MATCHING
445
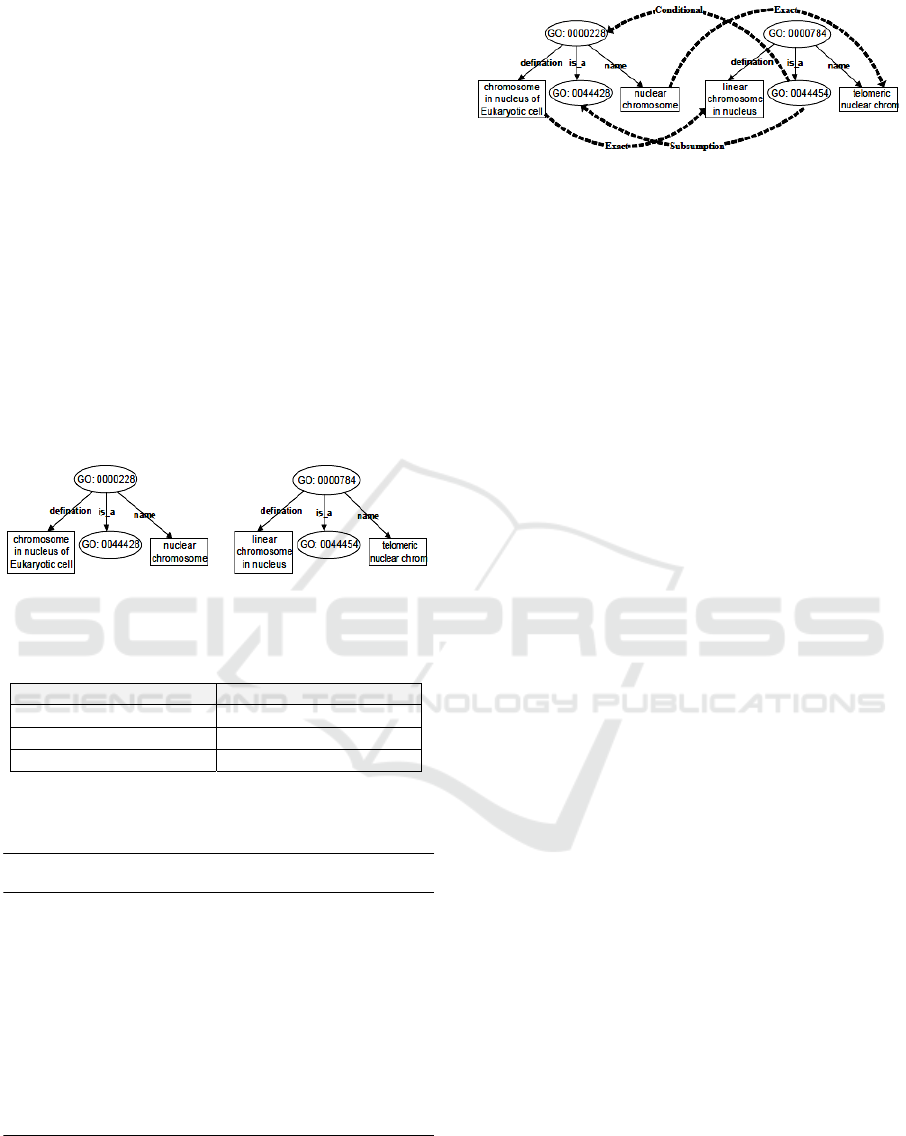
A gene may have more than one annotation in
different branches of GO. For example, the gene
nuclear chromosome is annotated as GO: 0000228
(Figure 1a) and GO: 0000784 (Figure 1b); it is
located in more than one cellular component, during
which it performs more than one molecular function.
Exact. Is the most desirable match. The degree exact
is assigned when a term in one ontology is
equivalent to or superclass of a term in another
ontology.
Subsumption. The degree subsumption is assigned
when a term of ontology includes a term in another
ontology i.e. it could be used as a substitute.
Conditional. The degree conditional is assigned
when a term of ontology doesn’t necessarily match a
term in the other ontology but may still be used to
achieve the desired result.
Figure 1a: Ontology O
1
. Figure 1b: Ontology O
2.
Table 2: Weights according to degree of Match.
Match Weight
Exact w
1
Subsumption w
2
Conditional w
3
Exact > Subsume > Conditional
The criteria in Table 2 are implemented as follows:
Algorithm 1: match(value)
1: if value ≥ 0.50 then
2: return Exact
3: else if 0.50 ≤ value ≥ 0.25 then
4: return Subsume
5: else if value < 0.25 then
6: return Conditional
7: else
8: return Fail
9: end if
We match the concepts of ontologies O
1
and O
2
based on the matching criteria proposed in Table 1.
The final match is an integrated ontology O shown
in Figure 2 below.
Figure 2: Ontology O.
4 BIPARTITE GRAPH
MATCHING
4.1 Overview
A Bipartite Graph is a graph G = (V, E) in which the
vertex set can be partitioned into two disjoint sets,
V=V
1
U V
2
such that every edge e E has one
vertex in V
1
and the other in V
2
.
A weighted bipartite graph G = (X U Y, X × Y)
having partitions with size V can be represented by a
weight matrix W of size V × V. In the weight matrix,
rows correspond to the X partition and columns
correspond to the Y partition of vertices. Each entry
w
ij
represents the weight of the edge between the
vertices x
i
and y
j
.
Feasible vertex labelling l is defined on the
vertices of both partitions of the bipartite graph as
follows:
l (x
i
) + l(y
j
) ≥ w
ij
x
i
X, y
j
Y
The subgraph corresponding to the feasible
vertex labeling l defined by the edges satisfying the
following equality is called the equality subgraph G
l
l (x
i
) + l(y
j
) = w
ij
We seek the max-weighted perfect matching in
bipartite graphs.
5 INCREMENTAL ALGORITHM
Our algorithm is based on the Hungarian algorithm,
which produces the feasible vertex labelling of the
vertices together with the max-weighted matching.
OntoMaintain updates the new feasible vertex
labelling of the extended graph while producing the
max-weighted matching or so called perfect
matching.
The Hungarian algorithm assumes the existence
of a weighted bipartite graph, G = (X U Y, X × Y) as
described in Section 4.1. The edge weights, w
ij
are
stored in a matrix W. An edge (x
i
, y
j
) is matched if x
i
is matched to y
j
and unmatched otherwise. We
WEBIST 2009 - 5th International Conference on Web Information Systems and Technologies
446

represent matched edges with solid lines and
unmatched edges with dotted lines. Furthermore, let
S X and T be neighbour of S i.e. T = nhbor(S) but
T ≠ Y. So T contains only those vertices from
partition Y, which are matched to a vertex in S.
The Hungarian algorithm outputs a complete
matching M*
V.
The incremental algorithm adds a new pair of
vertices to the max-weighted matched bipartite
graph whose feasible vertex labelling is also given,
together with the max-weighted matching. Then, it
assigns any feasible labelling to the newly added
pair of vertices and, by using this labelling,
determines the maximum-weighted matching of the
whole extended bipartite graph.
When we add a new pair of vertices to the max-
weighted-matched graph, a new weight matrix is
generated by adding a new row and a new column to
the previous weight matrix as the (V + 1)st row and
column corresponding to the edges incident to the
new vertices.
Algorithm 2: OntoMaintain.
Input: The extended bipartite graph
G’= (X
U Y, X × Y), with partitions of size
V+1 represented by a weight matrix W’of size
(V + 1) × (V + 1)
A feasible vertex labeling l of the first V
vertices such that it corresponds to G
l
containing the max-weighted matching
among the first V vertices
The max-weighted matching M*
V
among
the first V vertices of the partitions
Output: Perfect matching M*
V+1
and the updated
labels l of the vertices of the extended
bipartite graph G’.
1. Begin with matching M*
V
derived by Hungarian
algorithm.
Assign labels to new vertices Y
V + 1
and X
V + 1
as follows:
l(Y
V+1
) = 0
l(X
V+1
)= max y
j
Y (w
v+1
,
j
)
2. On the equality subgraph G
l,
pick an unmatched
vertex in partition X (called U) using matching
M*
V
. Grow a Hungarian tree rooted at this
vertex, while doing so; include all vertices
encountered in X (with U) into S and all vertices
encountered in Y into T.
3. If an augmenting path A is found, interchange
matched and unmatched edges in the augmenting
path. Calculate new matching by increasing size
by one.
4. If no augmenting path is found, revise the
labeling l. After label revision, labels of vertices
in S are decreased by the smallest possible
amount which adds at least one edge between S
and Y-T. Concurrently, labels of vertices in T are
increased by the same amount in order to
maintain the current matching between S and T.
Adding such edges will increase the chance of
finding an augmenting path. Revise labels as:
α
l
= min
xi
S, yj
Y - T
{ l (x
i
) + l(y
j
) - w
ij
}
l(v) + α
l
l’(v) =
l(v) - α
l
l(v) otherwise
5. Go to Step 2 to search for an augmenting path
with the new equality subgraph G’
l
defined by
the new labeling
5.1 Complexity Analysis
Our Incremental Algorithm, OntoMaintain, has a
time complexity of O(n
2
), where n denotes the total
number of vertices in the bipartite graph. Finding the
feasible labelling for the new row and column takes
linear time, so it has time complexity of O(n). In
order to find an augmenting path, provided we don’t
find one straight away, we have to modify the labels
of the vertices. This adds at least one edge to the
tree, so in the worst case after n iterations we will
find an augmenting path. Each iteration requires
O(n) operations. The computation of
α
l
requires
O(n
2
) complexity, adding edges from S to Y – T
requires O(n
2
) operations. Thus, the total complexity
of our algorithm is O(n
2
).
5.2 Correctness of the Algorithm
When we add a new pair of vertices to the
maximum-weighted-matched bipartite graph,
feasible labelling for the extended bipartite graph
can be determined by using the labelling on the
already determined max-weighted-matched part of
the graph. After adding the new vertices, all the
matched edges will be in the equality subgraph.
If there is no edge between the new pair of
vertices, then they will be the only unmatched
vertices in the graph. Because there is only a single
unmatched vertex pair, it is possible to find only a
single augmenting path in the equality subgraph. So
INCREMENTAL MAINTENANCE OF ONTOLOGIES BASED ON BIPARTITE GRAPH MATCHING
447
when the augmenting path is discovered and the
matching inverted, the size of the matching must
only be increased by one. This in turn would give us
the perfect matching.
If we don’t discover an augmenting path, we
modify the vertex labels to add another edge to the
tree. In the end, an augmenting path starting with the
only unmatched vertex in one partition and ending
with the only unmatched vertex in the other partition
will be discovered. That equality subgraph will
contain the perfect matching or the max-weighted
matching of the bipartite graph.
6 PERFORMANCE ANALYSIS
We implemented our algorithm in Java and tested it
on a Windows operating environment under optimal
conditions.
6.1 Experimental Results
Environment: The code was tested on a Windows
System, running Windows Vista Home Premium,
Intel Core 2 Duo 2.4 GHz with 2037 MB of RAM.
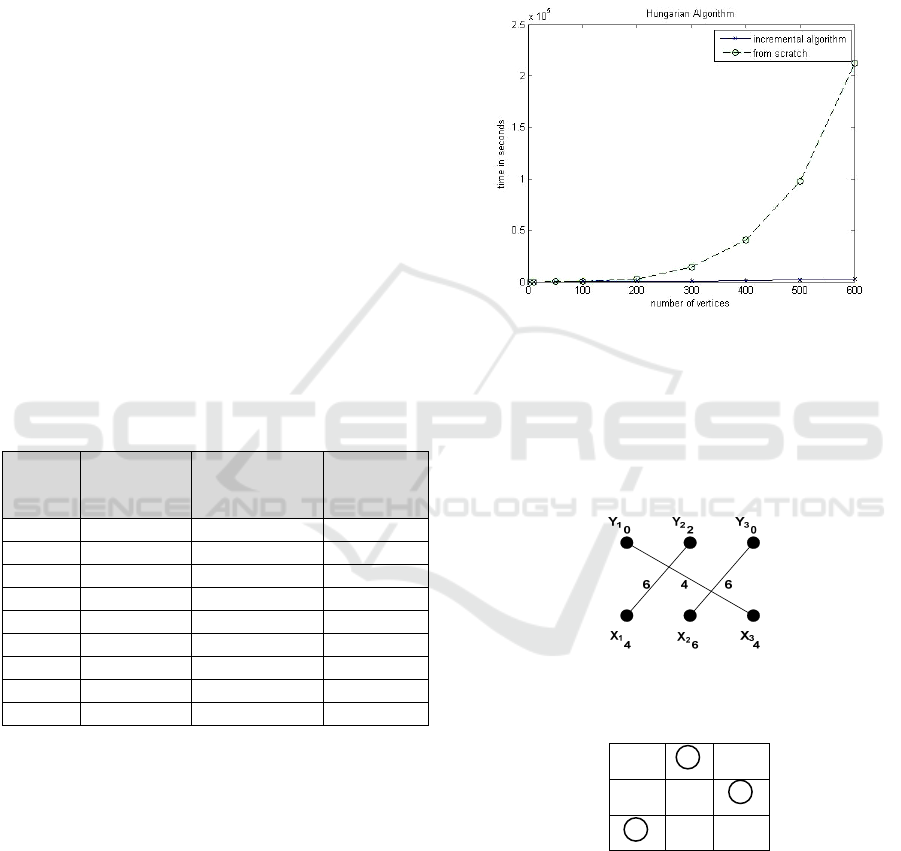
Table 3: Computation Time.
No.
of
Nodes
Hungarian
Algorithm
(ms)
OntoMaintain
Algorithm
(ms)
From
Scratch
(ms)
3 0 0 0
10 0 0 0
50 16 0 31
100 187 16 202
200 2980 140 2777
300 14118 312 14102
400 39873 1280 40528
500 91369 2168 97407
600 209602 2824 212206
In Table 3: Column 1. Shows number of nodes,
column 2. Shows time taken to run the original
algorithm, column 3. Shows time taken to run the
incremental algorithm and column 4. Shows time
taken to recalculate matching from scratch.
6.2 Performance Graph
The performance results of our algorithm are shown
in Figure 7 below. As is evident from the graph, the
time taken by the Incremental Algorithm to calculate
the new matching is significantly less than the time
taken to run the complete algorithm from scratch.
Until 50 nodes, the Incremental Algorithm takes
about the same time as the Hungarian run from
scratch. However with 100 nodes and onwards, the
Incremental Algorithm takes dramatically less time
to calculate the new perfect matching than the
Hungarian Algorithm run from scratch. As the
number of nodes in the graph increases, a significant
difference in performance time is observed.
Figure 3: Performance Graph.
6.3 An Illustrative Example
The max-weighted matching M*
V
among the first V
vertices of the partition and the corresponding
weight matrix are displayed in Figure 4a. and Figure
4b.
Figure 4a: Max-weighted matching M*V.
Y
1
0
Y
2
2
Y
3
0
X
1
4
X
2
6
X
3
4
Figure 4b: Weight Matrix.
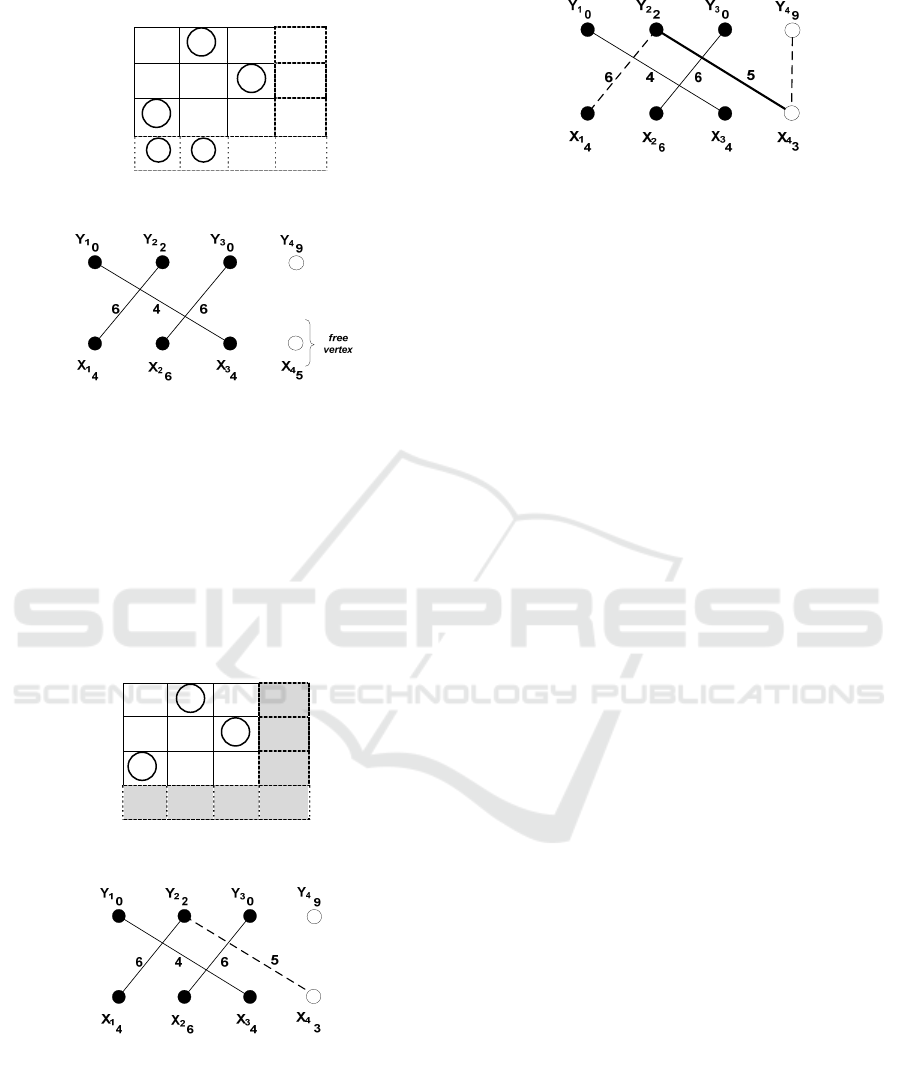
Now consider the (V + 1) x (V + 1) weight matrix
W’ in Figure 4c. The last row and column
correspond to the newly added vertices. Feasible
labels are assigned to X
4
and Y
4
as discussed in
Section 4.1
0 6 0
0 0 6
4 0 0
WEBIST 2009 - 5th International Conference on Web Information Systems and Technologies
448
Y
1
0 Y
2
2 Y
3
0 Y
4
9
X
1
4
X
2
6
X
3
4
X
4
5
Figure 4c: Extended Weight Matrix W’.
Figure 4d: Unsaturated nodes X
4
and Y
4.
In Figs. 4c and 4d X
4
and Y
4
are the only unsaturated
vertices and there is no augmenting path in the
equality graph, so we revise labels. Figure 5a shows
the new labelling after labels are revised using Step
4 of OntoMaintain. Figure 5b shows the equality
subgraph corresponding to the new labelling; the
augmenting path, in bold, is shown in the Final
Matching in Figure 5c.
Y
1
0 Y
2
2 Y
3
0 Y
4
9
X
1
4
X
2
6
X
3
4
X
4
3
Figure 5a: New Labelling.
Figure 5b: Equality Subgraph.
Figure 5c: Final Matching.
REFERENCES
Bellur, U., Kulkarni, R., 2007. Improved Matchmaking
Algorithm for Semantic Web Services Based on
Bipartite Graph Matching In IEEE International
Conference on Web Services (ICWS 2007), July 9-13,
2007, Salt Lake City, Utah, USA, pp. 86-93.
Doan, A., Madhavan, J., Domingos, P., Halevy, A., 2002.
Learning to Map between Ontologies on the Semantic
Web In Proceedings of the Eleventh International
World Wide Web Conference, WWW2002, Honolulu,
Hawaii, USA, 7-11 May 2002. ACM, 2002, pp.662-
673.
Gene Ontology (GO). http://www.geneontology.org/
Gruber, T.R., 1993. A Translation Approach to Portable
Ontology Specification. Knowledge Acquisition, 5(2),
1993, 199-220.
Kuhn, H., 1955. The Hungarian method for the assignment
problem. Naval Research Logistic Quarterly.
Melnik, S., Garcia-Molina, H., Rahm, E., 2002. Similarity
Flooding: A Versatile Graph Matching Algorithm and
its Application to Schema Matching, Proceedings of
the 18th International Conference on Data
Engineering, 26 February-1 March 2002, San Jose,
CA. IEEE Computer Society 2002, 117-128.
Mowbray, T.J., Zahavi, R., 1995. The Essential CORBA:
Sytems Integration Using Distributed Objects. New
York: Wiley.
Paolucci, M., Kawamura, T., Payne, T.R., Sycara, K.,
2002. Semantic Matching of Web Services
Capabilities, ISWC 2002, LNCS 2342, pp. 333–347,
Springer Verlag Berlin Heidelberg.
Pinto, H.S., Martins, J.P., 2000. Reusing Ontologies. In
Proc. of AAAI2000 Spring Symposium Series,
Workshop on Bringing Knowledge to Business
Processes, AAAI Press, pp. 77-84.
Reichhardt, T., 1999. It’s sink or swim as a tidal wave of
data approaches. Nature 399 (6736): 517-20.
Song, G., Qian, Y., Liu, Y., Zhang, K., 2006. OASIS: a
Mapping and Integration Framework for Biomedical
Ontologies, Proceedings of the 19th IEEE Symposium
on Computer-Based Medical Systems (CBMS 2006),
22-23 June 2006, Salt Lake City, Utah, USA, pp. 611-
616.
0
6
0 1
0 0
6
7
4
0 0 9
3 5 2 1
0
6
0 1
0 0
6
7
4
0 0 9
3 5 2 1
INCREMENTAL MAINTENANCE OF ONTOLOGIES BASED ON BIPARTITE GRAPH MATCHING
449
