
STRATEGIES FOR ROUTE PLANNING ON CATASTROPHE
ENVIRONMENTS
Coordinating Agents on a Fire Fighting Scenario
Pedro Abreu
FEUP/DEI/LIACC, Rua Dr. Roberto Frias, s/n 4200-465, Porto, Portugal
Pedro Mendes
EZ4U, Rua Guerra Junqueiro, 417, Porto, Portugal
Keywords:
Multi-Agent System, Agent Collaboration, Simulated Environment.
Abstract:
The concept of multi-agent systems (MAS) appeared when computer science researchers had the need to
solve problems involving the simulation of real environments with several intervenients (agents). Solving
these requires a coordination process between agents and in some cases negotiation. Such is the case of a
catastrophe scenario with the need intervention to minimize the consequences, like for instance a fire. In this
particular case the agents (firemen) must have a good coordination process to achieve as fast as they can their
fire fighting position. The main goal of this project is to create an optimal strategy to calculate the best path
to the fire fighting position. Tests were conducted on an existing simulator platform Pyrosim. Three factors
have an important role: wind (intensity and direction), ground topology and vegetation variety. At the end the
results were quite satisfactory, mainly in what concerns the agents main objective. The A* algorithm proved
to be feasible for this particular problem, and the coordination process between agents was implemented
successfully. In the future this project may have its agents ported to the BDI concept.
1 INTRODUCTION
The Multi Agent System (MAS) concept appeared
in the early 80s although most of the relevant re-
search trends only began being explored in the 90s
(Wooldridge, 2002). At that time, several research
publications (magazines, journals and books) started
to attract researches all around the world and due to
that growth, the European Union created AgentLink
(Union, 2008) which is the premier Co-ordination
Action for Agent Based Computing. Most of these
systems find their application in domains where it is
relevant to simulate a real environment with several
intervenients with well known responses to stimu-
lus and to solve complex constraint based problems
with hundreds or thousands of variables, in which
case, hopefully by making every agent fight for him-
self, a solution close to the optimal one will emerge
in a short time. In this research project, the focus
is on the systems described first. By using the Py-
rosim platform(Thunderheadeng, 2008), which simu-
lates the emergence of natural fires in a forest area,
a MAS is proposed in order to coordinate a set of
agents that personify typical firefighters against a fire
with a single focus. The Pyrosim platform supports
variable weather conditions, types of vegetation and
other aspects that will be discussed in the next sec-
tions. In a catastrophe situation, like a big dimension
fire, the main goal is to confine it, so to reduce the
damage as much as possible in the forest area. The
steps involved in tackling these problems are many.
First, one must detect the exact position where the
fire is consuming the green area, the second is to de-
termine which is the optimal path to reach the most
effective fire fighting position and finally how should
the firefighters position themselves so to minimize the
fire spreading process and actually confine it. This re-
search project presents a strategy to effectively tackle
these goals. The remainder of this paper is organized
as follows. Section 2 describes the state of the art re-
garding MAS concepts and research topics. Section 3
shows some of the most relevant features of this par-
ticular approach in terms of applied algorithms and
undertaken strategies. Section 4 exposes results ob-
tained and finally in section 5 conclusions are pre-
sented and future work trends are discussed.
277
Abreu P. and Mendes P. (2009).
STRATEGIES FOR ROUTE PLANNING ON CATASTROPHE ENVIRONMENTS - Coordinating Agents on a Fire Fighting Scenario.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
277-280
DOI: 10.5220/0001852102770280
Copyright
c
SciTePress

2 STATE OF THE ART
In the past few years, MAS proved to be a good ap-
proach to solve in cost-effective time a large set of
several types of distinct problems. In short terms, a
MAS is nothing more than a computer system where
typically there are several computing entities (agents)
with autonomous or semi-autonomous behaviors in-
teracting simultaneously in a specific environment.
The environment may directly related to real world,
and in such case the agents (usually the program that
a robot runs) base their behavior on sensor reading;
or it may interact with a fully digital environment
(simulators; industrial control engines etc.), (Lesser,
1999). The architecture of these is in most cases dis-
tributed as typically there is no need to centralize the
processing of each individual agent and thus over-
load the computing capacity of the station at hand.
Multi-Agent systems usually involve coordinating the
agents’ actions. This can be achieved following two
approaches. In one of them each agent tries to op-
timize its well being which is something that suits
well on competitive situations, as in most cases agents
may have contradictory objectives. In the other ap-
proach, a global goal is the pursued by a team of
agents and thus the coordination involved is quite dif-
ferent specially in what concerns the information to
be shared (Jennings, 2000). Such shared informa-
tion may be distributed among all the agents or there
may be hierarchical topologies so to promote agents
to leader agents. Coordinated agent positioning is one
of most sonant research topics concerning MAS. The
concepts involved point to strategies regarding decen-
tralized algorithms to make a group of agents with
a logical presence in a 2D or 3D space to position
themselves efficiently in order to effectively achieve
a common goal. One example of work conducted in
this area is presented by Scheutz (Scheutz and Bauer,
2006), where he presents a simulator of a biological
swarm where agents jointly achieve tasks using lo-
cal rules rather than global centralized or distributed
strategies. Each agent has a coverable area and the
main goal is to maximize the global coverable area
by the swarm by making the agents form a geometri-
cal polygon autonomously. Nowadays, there are sev-
eral real world systems that are simulated using MAS.
Many of them are already associated with worldwide
competitions while others are related to specific sce-
narios like particular ecosystems. Some of the MAS
that best fit the first case are the ones involved in
the Robocup competitions. The soccer competition
was the first to be introduced in 1997 on a worldwide
scale. In the last few years other competition with
MAS emerged. The RoboCup Rescue was probably
the most relevant one. Proposed by Kitano (Kitano
et al., 1999), the idea behind this new competition is
to simulate how do rescuing entities (Fire Brigades,
Police Forces, Medical Teams) act after a large scale
disaster like tsunamis, earthquakes, tornados, fires.
The simulator creates an environment representing a
virtual city with a set of rescuing objectives (save peo-
ple and property) that must be addressed within a lim-
ited time frame. It supports six categories of agents
with different missions. There is a type of agent for
each rescuing force and also a leader agent for each
of these forces. The common agents coordinate them-
selves by communicating with their respective leader.
The leaders can also communicate among themselves
to plan large scale actions.
3 APPROACH
3.1 The Pyrosim Platform
The massive destruction of our planet’s forests is one
of nowadays most critical issues for nearly every gov-
ernment on the globe. Following that perspective it is
important to study this phenomenon in order to draw
better and more precise fight plans. The Pyrosim plat-
form simulates fire in a forest area with several pos-
sible focuses. Fire emerges as a result of a combi-
nation of multiple nature factors. The spread of the
fire is also dependant on several factors that combine
themselves on many different ways. The most rel-
evant factors that are supported in Pyrosim simula-
tor are: wind, ground topology and vegetation vari-
ety. The Wind has two sub variables that should be
taken into account, namely its intensity and direction:
Intensity. It is relevant to state that the fire propaga-
tion increases with the wind intensity; however, if it
has extremely high values, the wind may transform
itself in a fire extinction factor. Direction. In a sit-
uation analysis the direction of the wind is often the
direction of the spread of the fire and thus it is also
a relevant factor. In Pyrosim the terrain can be plain
or heterogeneous with several valleys and hills. This
topology not only because that influence the positions
that the fireman (agents) must assume to fight the fire
but also because it has an effect on the fire propaga-
tion speed. In the case of a climbing fire it tends to
spread faster as the air overheats and moves up cre-
ating optimal conditions for this effect. On the oppo-
site situation the propagation of the fire has a reverse
behavior. In Pyrosim the terrain can be plain or het-
erogeneous with several valleys and hills. This topol-
ogy not only because that influence the positions that
the fireman (agents) must assume to fight the fire but
also because it has an effect on the fire propagation
ICEIS 2009 - International Conference on Enterprise Information Systems
278

speed. In the case of a climbing fire it tends to spread
faster as the air overheats and moves up creating op-
timal conditions for this effect. In this specific simu-
lator there are four types of vegetation: trees, sticks,
ground plants and humus. Each randomly generated
terrain by this platform has different ignition temper-
atures concerning this factor.
3.2 Multi-Agent System Architecture
In our approach there are two types of agents, namely
leader and worker. The classes that control them are
FireBirde and FireFoz respectively. They are both
extensions of the AgentSkeleton class because each
agent must have a physical representation on the map
and so it can virtually die. If this happens before his
death the leader passes his global information to the
healthiest worker which is later promoted to leader.
Every 20 ms the leader collects data on its work-
ers. The agent’s perceptions and their knowledge of
the world are stored instances in the class floatmap.
These are basically bidimensional matrixes represent-
ing an area surrounding the agent in what concerns a
given factor of the world. In this research work the
used matrixes were the ones related to presence of
fire at short and medium distance. The matrixes that
represent the presence of fire in the global map and
the terrain medium height were also used. These last
are less accurate than the previous ones because they
are 32*32 and the map is 128*128 which means that
each positions in the global map represents an aver-
age value of the four aggregates. These large scale
matrixes intend to simulate an area pocket map.
3.3 Multi-Agent Communication
System
When launched on the platform, the worker agents
send their position (POS) to the leader. The leader
agent acknowledges the worker as a team member,
estimates a good position to fight the fire (the used
method is described in the next subsection) and sends
it the coordinates of such position (GOTO). After re-
ceiving the new coordinates, the worker agent con-
sults his global firemap and calculates the best possi-
ble path to achieve these new coordinates. After get-
ting to the assigned point, the agent notifies the leader
(FORM) and the leader answers back with a request to
enter the team formation. The worker agent also no-
tify the leader of the impossibility to reach the desire
destination (e.g the designated point is inhabitable).
3.4 Heuristical Route Algorithm
To store the paths that must be ran, the agents use
graphs that are implemented the classes Graph, Edge
and Vertex. The graph is based on the world map ma-
trix, which is formed by a matrix of 32*32. By de-
fault it is assumed that the agents are able to go from
a given point to every neighbor in both ways assum-
ing 8 connectivity. This graph is generated in an ex-
tremely efficient way as from the top left corner, three
threads are launched to quickly explore the map con-
sidering the south, southeast and east directions. After
the generation process which assumes the same cost
in both ways for each edge, a heuristic calculus is per-
formed to reevaluate these variables. The first step is
to recalculate all the distances using 3D coordinates
and then for each edge the algorithm calculates the
percentage difference of height between the two con-
necting points and adds a cost to one of the ways in
case of a climb or a bonus in case of a descent (this
is only applied if the considered slope is bigger than
20%). If the slope is larger than 70%, the route is
considered to be impossible. The map has enough
resolution so that this algorithm does not fail in the
presence of valleys. The route calculus is based on
the well known A* (Russel and Norving, 2003) star
algorithm by providing it the fireman’s current posi-
tion and final position which is estimated according
to what is described in the next paragraph. At this
point it is relevant to state that each worker agent has
a specific memory region to store the graph and pro-
cess the A* algorithm, allowing a faster path recogni-
tion than what would be achievable by simply using a
collections data structure provided by the Java Virtual
Machine.To estimate a good position to fight the fire,
the leader agent consults his world fire map and stores
the coordinates where the temperature is higher (fire
point). After that to estimate a good fire fighting posi-
tion, the leader consults the current wind conditions
and determines a position where the worker agents
may center their formation. The formation will face
the fire against the wind. It may slightly rotate if such
rotation allows the agents to assume a higher ground
position.
3.5 Fire Fighting
After the agent reaches the designated position it asks
the leader where it should position itself to start fight-
ing the fire. The leader that knows where every agent
is and also knows the current wind direction, assigns
each of them a base position on a line that is perpen-
dicular to the wind direction and also that has its 0
axis point aligned with the front of the fire.
STRATEGIES FOR ROUTE PLANNING ON CATASTROPHE ENVIRONMENTS - Coordinating Agents on a Fire
Fighting Scenario
279
4 RESULTS
The obtained results were quite satisfactory, mainly
in what concerns the agent’s main objective, to extin-
guish the fire. Using the proposed strategy the agents
are able to reach their designated fire fighting posi-
tion really fast because the A* star algorithm seems
to be correctly applied and the processing has been
tuned up by using a memory region for the Pathfind-
ing of each single agent. The tests were conducted
with the default conditions, having the fire a single
focus (point of ignition) and having the teams from
five to fifteen members plus the leader agent.
5 CONCLUSIONS AND FUTURE
WORK
The proposed strategy proved to be efficient in the
terms assumed in the previous section. Even small
five member teams are able to extinguish the fire,
assuming that it ignites when all the agents are al-
ready in the map. The Pyrosim proved to be a mature
platform mainly in what concerns fire generation and
spreading and robustness in the communication pro-
tocol between the agents. The heuristics used in the
A* algorithm proved to be close to optimal because
the paths walked by the agents were apparently good
choices. Some tests were conducted having worker
agents use the A* and others the simulated anneal-
ing algorithm (Russel and Norving, 2003). In all the
tests the A* agents got to the destination faster than
the simulated annealing ones (considering the same
departure point). From the visual analysis on Py-
roviz, one could state that the second method disre-
gards some interesting paths that seem to be bad on a
short term perspective and that are chosen by the A*
algorithm. As for future work trends, there are several
possibilities. At this point the agents are only able to
fight fires with a single focus. However it would be
interesting to increase the number of focuses of the
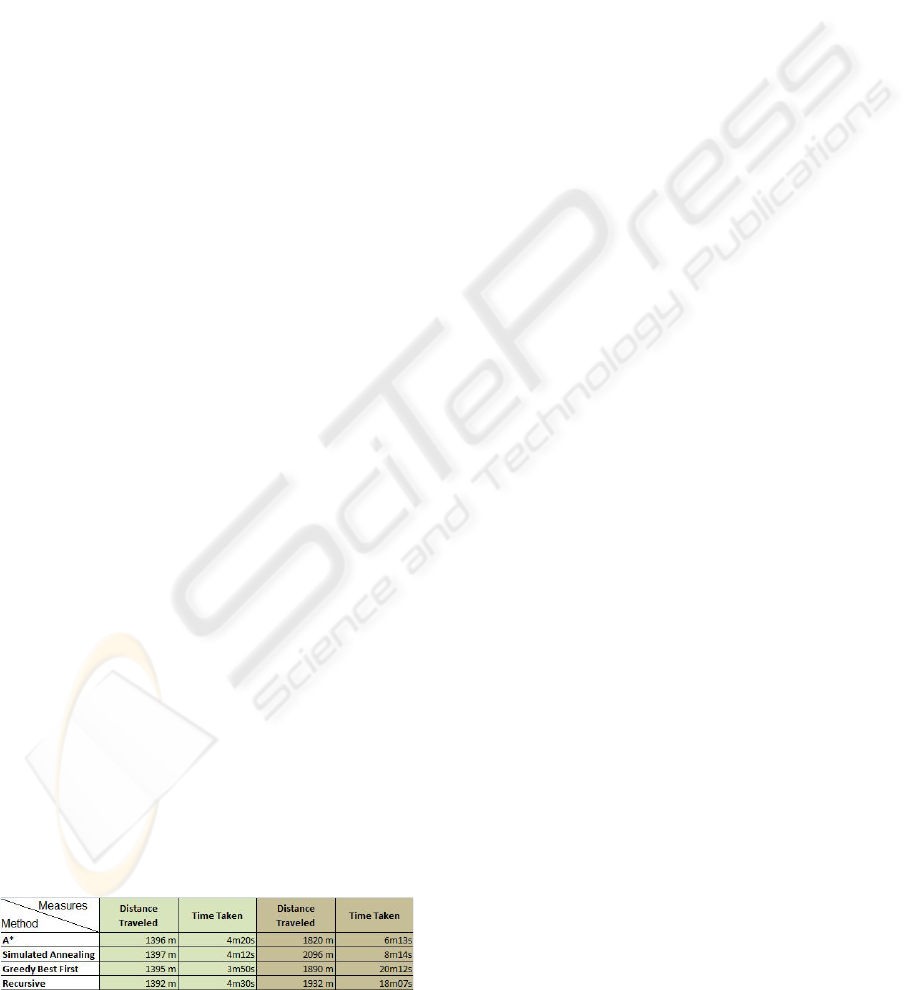
fire. The following figure (Figure 1) which comprises
data about landscapes with of 1960 square kilometer
of area, having the line segment between the agent’s
starting point to the fire focus about 1300 meters, con-
firms that the best suited method for this approach is
A*.
Figure 1: Results Obtained by different Methods.
Other methods were tried on landscapes with dis-
tinct levels of sinuosity. On the left side of the figure,
(green background), the values represent tests con-
ducted having Pyrosim configured for plain scenar-
ios while on the right (brown background) mountain
ones. On plain scenarios, A* might not be the best
approach since there is no real gain with the process-
ing overhead. In this case one might even say that
the best solution is to use greedy algorithms. Counter
measuring this last observation, A* is clearly the best
method for mountain scenarios, which in fact corre-
spond to the places where there is more need for a
good planning in finding the correct path. In a real
fire fighting situation, the firemen have emotions that
affect their judgment and performance. To add these
additional variables to our approach, an integration
with the work presented by Sarmento in (Sarmento
et al., 2004) would probably be a good contribution.
The current version of Pyrosim also supports indoor
spaces. Fighting fire in these spaces is quite differ-
ent from fighting in outdoors. Indoors have different
types of materials and a flammable conditions, spaces
and accesses tend to small sized, smokes may be toxic
and the propagation may differ a lot from room to
room. To create a good fire extinction strategy that
keeps every fireman alive is a challenge by itself.
REFERENCES
Jennings, N. (2000). On agent-based software engineering.
Artif. Intell., 117(2):277–296.
Kitano, H., Tadokoro, S., Noda, I., Matsubara, H., Taka-
hashi, T., Shinjou, A., and Shimada, S. (1999).
Robocup rescue: search and rescue in large-scale dis-
asters as a domain for autonomous agents research.
6:739–743.
Lesser, V. R. (1999). Cooperative multiagent systems: A
personal view of the state of the art. IEEE Trans. on
Knowl. and Data Eng., 11(1):133–142.
Russel, S. and Norving, P. (2003). Artificial Intelligence: A
Modern Approach Second Edition. Prentice Hall.
Sarmento, L., Moura, D., and Oliveira, E. (2004). Fighting
fire with fear.Proceeding of the 2nd European Work-
shop on Multi-Agent Systems (EUMAS 2004)
Scheutz, M. and Bauer, P. (2006). A scalable, robust, ultra-
low complexity agent swarm for area coverage and in-
terception tasks. Intelligent Control, 2006. IEEE In-
ternational Symposium on, pages 1258–1263.
Thunderheadeng (2008). Pyrosim oficial site. In Avaiable
online at http://www.thunderheadeng.com/pyrosim/.
Union, E. (2008). Agent link oficial site. In Avaiable online
at http://www.agentlink.org/.
Wooldridge, M. (2002). An Introduction to Multi-Agent
Systems. John Wiley and Sons,Ltd.
ICEIS 2009 - International Conference on Enterprise Information Systems
280
