
OBSERVER-BASED STATE FEEDBACK REMOTE CONTROL WITH
BOUNDED TIME-VARYING DELAYS
Imane Dilaneh and Laurent Laval
ECS–ENSEA
6, avenue du Ponceau, 95014 Cergy-Pontoise Cedex, France
Keywords:
Networked Control Systems, Time-varying delays, Lyapunov–Krasovskii functional, LMI.
Abstract:
This paper investigates the problem of remote stabilization via communication networks with uncertain, “non-
small”, time-varying, non-symmetric transmission delays affecting both the control input and the measured
output. More precisely, this paper focuses on a closed-loop Master-Slave setup with a TCP network as commu-
nication media, and an observer-based state-feedback control approach to deal with the stabilization objective.
First, we establish some asymptotic stability criteria regarding to a Lyapunov–Krasovskii functional derived
from a descriptor model transformation, in case of “non-small” delays (that are time-varying delays with non-
zero lower bounds). Then, some stability conditions are given in terms of Linear Matrix Inequalities which
are used, afterwards, to design the observer and controller gains. Finally, the proposed stabilizing approach is
illustrated through numerical and simulation results, related to the remote control of a “ball and beam” system.
1 INTRODUCTION
Over the past few years, the widespread development
of low-cost wired and wireless data networks has lead
to an increasing interest for Networked Control Sys-
tems (NCSs) (for instance, see (Yang, 2006; Tang
and Yu, 2007; Hespanha et al., 2007) and references
therein). Indeed, such networks seem to be suitable
for large scale control systems with sensors, actua-
tors and controllers that communicate over a shared
medium. However, most of common network physi-
cal configurations and communication protocols
1
lead
to transmission delays and even data losses. Then,
from a control viewpoint, it is well-known that such
undesirable features affect the overall NCS behav-
ior, leading possibly to poor performance and/or in-
stabilities (e.g. (Niculescu, 2001; Ge et al., 2007)).
This justifies the increasing investigations on con-
trol strategies to insure both closed-loop stability
and good performance for time-delayed systems (see
(Tipsuwan and Chow, 2003; Richard, 2004) and ref-
erences therein). Following this, the present paper
then deals with the stabilization of a Networked Con-
trol System with consideration of TCP (Transmis-
sion Control Protocol) networking protocol for bi-
1
Such as User Datagram Protocol (UDP), Transfer Con-
trol Protocol (TCP), Medium Access Control protocols, etc.
directional communications between a Master sys-
tem (computing the control) and a Slave system (to
be controlled). In particular, we investigate the de-
sign of an observer-based (static) state-feedback con-
troller (located in the Master system) so as to insure
the asymptotic stability of the closed-loop NCS what-
ever the presence of time-varying, non-symmetric de-
lays in the control and feedback loops. In this pur-
pose, first, we establish some stability conditions by
means of a Lyapunov–Krasovskii functional derived
from a descriptor model transformation (Fridman and
Shaked, 2002). These conditions are given in terms
of Linear Matrix Inequalities which are used after-
wards to design both controller and observer gains,
by means of LMI optimization. This design approach
is then illustrated through an example related to the
remote control of a “ball and beam” system.
This paper is organized as follows. Section 2 de-
scribes the Networked Control System under consid-
eration. Section 3 defines the observer-based control
law, while section 4 focuses on the design of both
state-feedback controller and observer gains. Section
5 presents a “ball and beam” system as remote con-
trolled plant for illustrating the proposed control strat-
egy. Then, some numerical and simulations results
related to the observer-based control of this system
are presented. Finally, some concluding remarks are
given in section 6.
136
Dilaneh I. and Laval L.
OBSERVER-BASED STATE FEEDBACK REMOTE CONTROL WITH BOUNDED TIME-VARYING DELAYS.
DOI: 10.5220/0002170201360142
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-8111-99-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 SYSTEM DESCRIPTION
Regarding to Figure 1, the Networked Control System
under consideration consists in a Master-Slave setup,
with a TCP network as communication media linking
these two systems.
Figure 1: The Networked Control System (Master-Slave
configuration).
• The exchanged data correspond respectively to
the control input (sent by the Master to the Slave),
and a measured output of the remote system (sent
by the Slave to the Master). Due to the net-
working protocol and communication lines prop-
erties, we consider some time-delays τ
1
and τ
2
,
respectively related to the Master-to-Slave and
Slave-to-Master transmissions. Moreover these
delays are assumed to be time-varying, uncertain
(with known lower and upper bounds), and non-
symmetric (that is τ
1
6= τ
2
).
Remark 1. The consideration of TCP networking
protocol insure that all transmitted data are received
in the emission order. Thus, when considering a first
data packet emitted at time t
1
undergoing a delay τ
1
,
and a second data packet emitted at time t
2
undergo-
ing a delay τ
2
, the correct scheduling of data implies
that (see (Witrant et al., 2003)):
t
1
+ τ
1
< t
2
+ τ
2
⇔ −1 <
τ
2
− τ
1
t
2
− t
1
≃
dτ
dt
(1)
Therefore, the Master-to-Slave and Slave-to-
Master delays τ
i
(t) (with i = 1,2) can be expressed
as differentiable functions, and such that:
∀t ≥ 0, τ
i
(t) = h
i
+ η
i
(t),
with 0 ≤ η
i
(t) ≤ µ
i
,
˙
η
i
(t) ≤ d
i
< 1 (2)
where the τ
i
(t) (with i = 1,2) are considered as time-
varying bounded delays with non-zero lower bounds
h
i
> 0 (sometimes referred to as ”non-small delays”).
η
i
(t) is a differentiable function which characterizes
a (bounded) time-varying perturbation with bounded
time-derivative
˙
η
i
(t) < 1 (so that τ
i
(t) are commonly
referred to as slowly-varying delays – e.g. (Shustin
and Fridman, 2007)), and µ
i
and d
i
are strictly posi-
tive, constant upper-bounds (see (Fridman, 2004)).
Moreover, we can define τ
∗
i
= h
i
+ µ
i
as an upper-
bound for τ
i
(t), leading finally to h
i
≤ τ
i
(t) ≤ τ
∗
i
.
Remark 2. Such an assumption on non-zero lower
bounds h
i
of delays is realistic. Indeed, zero or
close to zero delays (corresponding to instantaneous
or quasi-instantaneous transmissions) are usually not
met in most of real networks (due to, at least, propa-
gation phenomena).
• The controlled system (within the Slave part),
is supposed to be linear, controllable and ob-
servable, with a known state-space representation
(A;B;C). By taking into account the time-delay
τ
1
(intrinsic to the Master-to-Slave transmission),
this Slave system is then given by:
˙x(t) = Ax(t) + Bu(t − τ
1
(t))
y(t) = Cx(t) (3)
where x(t) ∈ R
n
is the state vector, u(t) ∈ R
m
is
the delayed control input with an input time-delay
τ
1
(t) > 0 that we assume to be a differentiable
function satisfying to relation (2). y(t) ∈ R
p
is
the system output, and A, B and C are constants
matrices of appropriate dimensions.
• The Master system includes an observer which
aims at providing an estimation ˆx(t) of the full
state-vector x(t) of the Slave system, from the
output y(t) it receives after a delay τ
2
(t) (assum-
ing this delay also satisfies to relation (2)). From
this estimation ˆx(t), the Master then computes the
control and forwards it to the Slave.
3 THE OBSERVER-BASED
STATE-FEEDBACK CONTROL
3.1 The Full-state Observer
As already mentioned, this paper considers, from the
Master system viewpoint, a full-state reconstruction
of the Slave state-vector x(t) from the transmitted, de-
layed, scalar output y(t − τ
2
) coming from the Slave
system. As this last system is assumed to be linear,
we propose here to perform this full-state estimation,
by means of a Luenberger-typeobserver (Luenberger,
1971).
With respect to the NCS setup, the observer can
OBSERVER-BASED STATE FEEDBACK REMOTE CONTROL WITH BOUNDED TIME-VARYING DELAYS
137

then be defined by:
·
ˆx(t) = Aˆx(t) + Bu(t − τ
1
(t))
−L[y(t − τ
2
(t)) − ˆy(t − τ
2
(t))]
ˆy(t) = Cˆx(t) (4)
where L is the observer gain which has to be designed
so as to ensure a sufficiently fast convergence of ˆx(t)
towards the true system state x(t), regardless of time-
varying delay τ
2
(t).
Remark 3. Delay τ
2
(t) is supposed to be time-
varying and uncertain. Nevertheless, we assume the
knowledge of an upper-bound τ
∗
2
= h
2
+ µ
2
≥ τ
2
(t).
3.2 The Control Law
Regarding to the literature, many control strategies
have been proposed to deal with the stabilization
problem of NCS with delays. In our case, as the
Luenberger-type observer is supposed to provide a
full-state reconstruction ˆx(t) of the Slave state-vector
x(t), we propose to investigate the use of a simple
state-feedback control u(t) of the following form:
u(t) = K ˆx(t) (5)
where K is the control gain to design so as to guar-
antee the closed-loop stability of the controlled sys-
tem (the Slave), regardless of the control input time-
varying delay τ
1
(t).
4 DESIGN OF CONTROLLER
AND OBSERVER GAINS
With respect to (4) and (5), this section is devoted
to the design of both controller and observer gains
that guaranty the closed-loop stabilization of the NCS
(despite of both input and output time-varying delays
τ
1
(t) and τ
2
(t)). In this aim, let us establish some
asymptotic stability criteria, by applying a Lyapunov-
Krasovskii methodology based on a descriptor model
transformation (see (Fridman and Shaked, 2002)).
4.1 Control Design
First, let us focus on the design of an ideal controller
u(t) = Kx(t) by considering a perfect observer (such
that ˆx(t) = x(t)), before to deal, in a later subsec-
tion, with the influence of the observation error on the
whole system stability.
Thus, first, let us recall that the controlled system
is represented by a linear system with bounded, time-
varying, input delay (see Remark 1), whose dynamics
can be expressed as:
˙x(t) = Ax(t) + BKx(t − τ
1
(t))
x(θ) = ϕ(θ), θ ∈ [−τ
∗
1
,0] (6)
where τ
∗
1
= h
1
+ µ
1
is an upper-bound for time-delay
τ
1
(t). Then, following a similar approach as in
(Fridman, 2004), let us express a result that gives
some asymptotic stability conditions for system (6),
in terms of Linear Matrix Inequalities, for a given K.
Theorem 1. Given a gain matrix K, system (6) is
asymptotically stable if there exists n×n matrices 0 <
P
1
, P
2
, P
3
, S
1
, S
a
1
,Y
1i
,Y
a
1i
,Z
1k
,Z
a
1k
, and R
1
,R
a
1
satis-
fying the LMI conditions for i = 1,2 and k = 1,2,3:
Γ =
Ψ
1
P
T
0
BK
−Y
T
a
1
Y
T
a
1
−Y
T
1
∗ −(1− d
1
)S
a
1
0
∗ ∗ −S
1
< 0
(7)
and,
R
1
Y
1
∗ Z
1
≥ 0,
R
a
1
Y
a
1
∗ Z
a
1
≥ 0 (8)
with,
Y
1
= [Y
11
Y
12
] Y
a
1
= [Y
a
11
Y
a
12
]
Z
1
=
Z
11
Z
12
∗ Z
13
Z
a
1
=
Z
a
11
Z
a
12
∗ Z
a
13
where ∗ denotes the symmetric, and Ψ
1
is given by:
Ψ
11
= P
T
2
A+ A
T
P
2
+ S
1
+ h
1
Z
11
+Y
11
+Y
T
11
+ S
a
1
+µ
1
Z
a
11
Ψ
12
= A
T
P
3
+ P
T
1
− P
T
2
+ h
1
Z
12
+Y
12
+ µ
1
Z
a
12
Ψ
13
= −(P
3
+ P
T
3
) + h
1
(Z
13
+ R
1
) + µ
1
R
a
1
+ µ
1
Z
a
13
Proof — Representing (6) in an equivalent descriptor
form ((Fridman and Shaked, 2002)) leads to:
˙x(t) = z(t) (9)
0 = −z(t) + Ax(t) + BKx(t − τ
1
(t))
By posing ¯x(t) = col{x(t), z(t)} and E =
diag{I
n
,0}, then (9) can be rewritten as:
E
·
¯x =
"
˙x(t)
0
#
=
"
z(t)
−z(t) + Λx(t)
#
−
"
0
BK
#
Z
t
t−h
1
z(s)ds
−
"
0
BK
#
Z
t−h
1
t−h
1
−η
1
z(s)ds (10)
where Λ = A+ BK.
Now, considering a Lyapunov-Krasovskii func-
tional (LKF) of the form:
V(t) = V
n
(t) + V
a
(t); (11)
where V
n
(t) is a nominal LKF corresponding to the
nominal system (10) with h
1
6= 0 and η
1
(t) = 0, and
such that (see (Fridman, 2004)):
V
n
(t) = ¯x(t)
T
EP¯x(t) +
Z
0
−h
1
Z
t
t+θ
z(β)
T
R
1
z(β)dβdθ
+
Z
t
t−h
1
x(s)
T
S
1
x(s)ds (12)
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
138

and V
a
(t) is an additional term (which corresponds to
the perturbed system), which vanishes when the delay
perturbation approaches to 0 (that is when η
1
(t) ≃ 0)
and such that:
V
a
(t) =
Z
0
−µ
1
Z
t
t+θ−h
1
z(s)
T
R
a
1
z(s)dsdθ
+
Z
t
t−τ
1
(t)
x(s)
T
S
a
1
x(s)ds (13)
with P =
P
1
0
P
2
P
3
, P
1
, R
1
, R
a
1
, S
1
and S
a
1
> 0.
Noting that V
1
= ¯x(t)
T
EP¯x(t) = x(t)
T
P
1
x(t), then
differentiating this term in t along the trajectories of
the perturbed system (9) leads to:
dV
1
(t)
dt
= 2¯x(t)
T
P
T
˙x(t)
0
Then, replacing [ ˙x(t) 0]
T
by the right side of
(10), the derivative of V
n
(t) in t along the trajecto-
ries of the perturbed system (9) satisfies the following
relation:
˙
V
n
(t) = ¯x(t)
T
Ψ
0
¯x(t) + δ
1
(t) + δ
2
(t) + h
1
z(t)
T
R
1
z(t)
−
Z
t
t−h
1
z(s)
T
R
1
z(s)ds+ x(t)
T
S
1
x(t)
−x(t −h
1
)
T
S
1
x(t −h
1
) (14)
with Ψ
0
= P
T
0 I
n
Λ −I
n
+
0 I
n
Λ −I
n
T
P.
Moreover, it comes that δ
1
(t) and δ
2
(t) are given
by:
δ
1
(t) = −2¯x(t)
T
P
T
0
BK
Z
t
t−h
1
z(s)ds
δ
2
(t) = −2¯x(t)
T
P
T
0
BK
Z
t−h
1
t−h
1
−η
1
z(s)ds
Now, let us bound δ
1
(t) and δ
2
(t) by applying the
bounding given in (Moon et al., 2001), where, for any
a ∈ R
n
, b ∈ R
2n
, R ∈ R
n×n
, Y ∈ R
n×2n
, Z ∈ R
2n×2n
,
N ∈ R
2n×n
the following holds:
−2b
T
Na ≤
a
b
T
R Y − N
T
Y
T
− N Z
a
b
with
R Y
Y
T
Z
≥ 0.
By considering such bounding condition and tak-
ing N = P
T
[0 BK]
T
, a = z(s), b = ¯x(t), R = R
1
,
Z = Z
1
, Y = Y
1
such that:
R
1
Y
1
∗ Z
1
≥ 0
then, we can find the following bound for δ
1
:
δ
1
(t) ≤
Z
t
t−h
1
z(s)
T
R
1
z(s)ds+ h
1
¯x(t)
T
Z
1
¯x(t)
+2(x(t)
T
− x(t − h
1
)
T
)
(Y
1
−
0 (BK)
T
P) ¯x(t) (15)
Similarly to δ
1
(t), by posing N = P
T
[0 BK]
T
, a =
z(s) , b = ¯x(t), R = R
a
1
, Z = Z
a
1
, Y = Y
a
1
, such that:
R
a
1
Y
a
1
∗ Z
a
1
≥ 0
the bound of δ
2
(t) is given by:
δ
2
(t) ≤
Z
t−h
1
t−h
1
−η
1
z(s)
T
R
a
1
z(s)ds+ µ
1
¯x(t)
T
Z
a
1
¯x(t)
+2(x(t − h
1
)
T
− x(t − h
1
− η
1
)
T
)
(Y
a
1
−
0 (BK)
T
P) ¯x(t) (16)
Then, the time-derivative of V
a
(t) is given by:
˙
V
a
(t) = µ
1
z(t)
T
R
a
1
z(t) −
Z
t−h
1
t−h
1
−η
1
z(s)
T
R
a1
z(s)ds
+x(t)
T
S
a
1
x(t)
−(1− d
1
)x(t −h
1
− η
1
)
T
S
a
1
x(t −h
1
− η
1
)
Substituting (15) and (16) into (14), we find that the
derivative of V(t) along the trajectories of the per-
turbed system satisfies the following inequality:
˙
V(t) ≤ ζ(t)
T
Γζ(t) (17)
where ζ(t) = col{ ¯x(t),x(t − h
1
−η
1
),x(t − h
1
)}, and
Γ is a negative matrix given by (7). Thus
˙
V(t) is neg-
ative definite if conditions (7) and (8) are satisfied,
while V(t) ≥ 0. Therefore, system (6) is asymptoti-
cally stable, and the proof is achieved.
Note that conditions (7) and (8) are satisfied for
a given state-feedback gain K. However, in our case
(that is a stabilization problem involving a control law
u(t) = Kx(t)), K is an unknown control gain to be
designed so as to insure the closed-loop stability of
system (9). In such a case, the LMI condition (7)
contains a bilinear term coming from the product of
the LMI variable with K, leading (7) to be a Bilin-
ear Matrix Inequality. Therefore, to give rise to a
LMI condition for computing of gain K, we can ap-
ply the transformation given in (Suplin et al., 2004).
In this aim, let us define: P
3
= εP
2
where ε ∈ R is
a tuning scalar parameter. Moreover, let us note that
P
2
is nonsingular since the only matrix which can be
negative definite in the second block on the diago-
nal of Ψ
1
is −ε(P
2
+ P
T
2
). Therefore we can also
define:
¯
P = P
−1
2
. In addition, for any matrix V =
{P
1
,S
1
,S
a
1
,Y
1i
,Y
a
1i
,Z
1k
,Z
a
1k
,R
1
,R
a
1
}, for i = 1,2 and
OBSERVER-BASED STATE FEEDBACK REMOTE CONTROL WITH BOUNDED TIME-VARYING DELAYS
139

k = 1,2,3, let us define an other matrix
¯
V =
¯
P
T
V
¯
P. Then, by multiplying (7), from the right and
the left sides respectively, by ∆
4
= diag{
¯
P,
¯
P,
¯
P,
¯
P}
and its transpose ∆
T
4
, and multiplying (8) by ∆
3
=
diag{
¯
P,
¯
P,
¯
P} and its transpose ∆
T
3
, from the right and
the left sides respectively, and posing W = K
¯
P, the
proof of the following theorem is straightforward.
Theorem 2. Suppose that, for some positive number
ε, there exists a positive-definite matrix
¯
P
1
, n × n ma-
trices
¯
P,
¯
S
1
,
¯
S
a
1
,
¯
Y
1i
,
¯
Y
a
1i
,
¯
Z
1k
,
¯
Z
a
1k
,
¯
R
1
,
¯
R
a
1
and W ∈
R
m×n
satisfying the LMI conditions for i = 1,2 and
k = 1,2, 3:
Γ =
Ψ
2
BW
εBW
−
¯
Y
T
a
1
¯
Y
T
a
1
−
¯
Y
T
1
∗ −(1− d
1
)
¯
S
a
1
0
∗ ∗ −
¯
S
1
< 0 (18)
and,
¯
R
1
¯
Y
1
∗
¯
Z
1
≥ 0,
¯
R
a
1
¯
Y
a
1
∗
¯
Z
a
1
≥ 0 (19)
where,
¯
Y
1
= [
¯
Y
11
¯
Y
12
]
¯
Y
a
1
= [
¯
Y
a
11
¯
Y
a
12
]
¯
Z
1
=
¯
Z
11
¯
Z
12
∗
¯
Z
13
¯
Z
a
1
=
¯
Z
a
11
¯
Z
a
12
∗
¯
Z
a
13
and matrix Ψ
2
is given by:
Ψ
21
= A
¯
P+
¯
P
T
A
T
+ S
1
+ h
1
¯
Z
11
+
¯
Y
11
+
¯
Y
T
11
+
¯
S
a
1
+ µ
1
¯
Z
a
11
Ψ
22
= ε
¯
P
T
A
T
+
¯
P
1
−
¯
P+ h
1
¯
Z
12
+
¯
Y
12
+ µ
1
¯
Z
a
12
Ψ
23
= −ε(
¯
P+
¯
P
T
) + h
1
(
¯
Z
13
+
¯
R
1
) + µ
1
¯
R
a
1
+µ
1
¯
Z
a
13
Then, the gain,
K = W
¯
P
−1
(20)
asymptotically stabilizes the system (6) for delay
τ
1
(t) ≤ τ
∗
1
.
4.2 Observer Design
Since the pair (A;C) is assumed to be observable,
it is possible to determine, in the non-delayed case
(that is τ
2
= 0), a gain L such that the Luenberger-
type observer leads the estimation error to asymptot-
ically converge towards zero. Now, by taking into
account the variable delay τ
2
(t) on the Slave out-
put, then, from (3) and (4), the observation error
e(t) = ˆx(t) − x(t) is ruled by:
˙e(t) = Ae(t) + LCe(t − τ
2
(t)) (21)
We then express the following result which insures
that the observer state ˆx(t) converges sufficiently fast
towards the true system state x(t) despite of delay
τ
2
(t).
Theorem 3. Suppose that, for some positive scalar
ε, there exists n × n matrices 0 < P
1
, P, S
2
,
S
a
2
,Y
2i
,Y
a
2i
,Z
2k
,Z
a
2k
, R
2
,R
a
2
and X ∈ R
n×p
satisfying
the LMI conditions for i = 1,2 and k = 1, 2, 3:
Γ =
Ψ
1
XC
εXC
−Y
T
a
2
Y
T
a
2
−Y
T
2
∗ −(1− d
2
)S
a
2
0
∗ ∗ −S
2
< 0 (22)
and,
R
2
Y
2
∗ Z
2
≥ 0,
R
a
2
Y
a
2
∗ Z
a
2
≥ 0 (23)
where,
Y
2
= [Y
21
Y
22
], Y
a
2
= [Y
a
21
Y
a
22
]
Z
2
=
Z
21
Z
22
∗ Z
23
, Z
a
2
=
Z
a
21
Z
a
22
∗ Z
a
23
with matrix Ψ
1
is given by:
Ψ
11
= P
T
A+ A
T
P+ S
2
+ h
2
Z
21
+Y
21
+Y
T
21
+S
a
2
+ µ
2
Z
a
21
Ψ
12
= εA
T
P+ P
T
1
− P
T
+ h
2
Z
22
+Y
22
+ µ
2
Z
a
22
Ψ
13
= −ε(P+ P
T
) + h
2
(Z
23
+ R
2
) + µ
2
R
a
2
+µ
2
Z
a
23
Then, the gain
L = (P
T
)
−1
X (24)
leads the estimation error e(t) = ˆx(t)− x(t) to asymp-
totically converge towards zero.
Proof — Representing (21) in an equivalent descrip-
tor form (Fridman and Shaked, 2002):
E
·
¯e(t) =
z(t)
−z(t) + Ae(t) + LCe(t− τ
2
(t))
(25)
where ¯e(t) = col{e(t),z(t)}, E = diag{I
n
,0}.
Recalling that τ
2
(t) = h
2
+ η
2
(t),0 ≤ η
2
(t) ≤
µ
2
,
˙
η
2
(t) ≤ d
2
< 1, the proof of this theorem use the
same Lyapunov-Krasovskii as given by (11) with a
single delay τ
2
(t):
V(t) = V
n
(t) + V
a
(t)
where V
n
(t) is a nominal LKF corresponding to the
nominal system (25) with h
2
6= 0 and η
2
(t) = 0, and
such that (see (Fridman, 2004))
V
n
(t) = ¯e(t)
T
EP¯e(t) +
Z
0
−h
2
Z
t
t+θ
z(β)
T
R
2
z(β)dβdθ
+
Z
t
t−h
2
e(s)
T
S
2
e(s)ds (26)
and V
a
(t) is an additional term of the following form:
V
a
(t) =
Z
0
−µ
2
Z
t
t+θ−h
2
z(s)
T
R
a
2
z(s)dsdθ
+
Z
t
t−τ
2
(t)
e(s)
T
S
a
2
e(s)ds (27)
Then, by differentiating of V(t) along the trajectories
of system (25), and posing P = P
2
, P
3
= εP
2
, where
ε ∈ R is a tuning scalar parameter, then the proof is
achieved by noting that X = P
T
L.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
140
5 ILLUSTRATIVE EXAMPLE
This section aims at illustrating the theoretical results
of section 4, through an example related to the re-
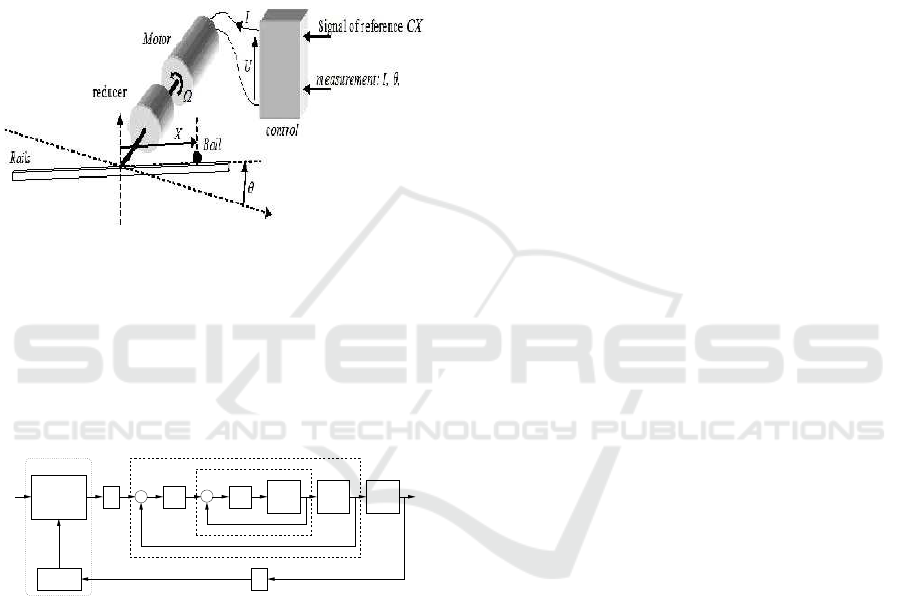
mote control of a “ball and beam” system. Regard-
ing to Figure 2, this plant mainly consists in a steel
ball rolling on two parallel tensioned wires. These are
mounted on a beam, pivoted at its center, such that the
beam angle may be controlled by a servo-motor and
sensed by transducers to provide measurements of the
beam angle and ball position.
Figure 2: The Ball and Beam system to be controlled.
Regarding to the control scheme of Figure 3, the
fast dynamics of the plant are regulated by two inner
loops (with PI and PD controllers located in the Slave
systems), so that the remaining control problem is to
regulate the ball position by varying the beam angle.
State
feedback
Controller
Elec.
Motor
Mecha.
Motor
Ball
Beam
+ PD + PI
Observer
Master
Inner loop 1
Inner loop 2
τ
1
τ
2
Figure 3: Control scheme of the Slave system.
According to this, the system dynamics to be con-
trolled by means of the remote observer-based state-
feedback controller, can then be defined by:
˙x(t) =
0 1
0 0
x(t) +
0
k
b
u(t − τ
1
(t))
y(t) =
k
x
0
x(t) (28)
where x(t) = [x
x
(t) x
v
(t)]
T
∈ R
2
is the state-vector,
x
x
(t) and x
v
(t) correspond respectively to the position
and the speed of the ball. u(t − τ
1
(t)) is the control
input (with input delay τ
1
(t))), y(t) is the measured
output (corresponding to the ball position) which is
forwarded to the Master system. k
b
and k
x
are two
constant parameters (with k
b
= 6.1 ms
−2
rad
−1
and
k
x
= 7 V/m).
Now, let us consider non-symmetric delays
τ
1
(t) 6= τ
2
(t), with, according to (2): h
1
= 0.3s, h
2
=
0.25s, µ
1
= µ
2
= 0.1s (recalling that h
1
and h
2
are con-
stant values, while η
1
(t) and η
2
(t) are time-varying
perturbations bounded by µ
1
the and µ
2
respectively).
Moreover, let us consider d
1
= d
2
= 0.1. By applying
Theorem 2 to (6) for ε = 9 , we find the LMI (18) is
feasible for symmetric, positive-definite matrices:
¯
P
1
=
1.98 0
0 1.98
¯
R
1
=
2.29 −0.64
−0.64 1.38
¯
R
a
1
=
2.13 −0.45
−0.45 1.48
¯
S
1
=
0.12 −0.08
−0.08 0.11
¯
S
a
1
=
0.1934 −0.1241
−0.1241 0.5671
and,
¯
P =
0.5138 −0.2327
−0.2327 0.3694
W
T
=
−0.0088
−0.0699
With respect to (20), the state-feedback controller
gain K is then given by,
K =
−0.1440 −0.2800
(29)
Now, by applying Theorem 3 to (21) for ε = 5.5
(tuned by trial and error), we find the LMI (22) is fea-
sible for symmetric, positive-definite matrices:
P
1
=
8.27 0
0 8.27
R
2
=
1.05 −1.46
−1.46 10.29
R
a
2
=
4.22 −2.16
−2.16 15.84
S
2
=
0.62 −0.23
−0.23 0.70
S
a
2
=
0.157 −0.112
−0.112 0.373
with,
P =
0.963 −2.240
−2.240 9.964
X =
−0.069
−0.097
Then, from (24), we finally obtain the observer gain:
L = [−0.198 − 0.054]
T
(30)
By considering the control scheme of figure 3 (mean-
ing that the two inner loops are taking in account in
simulating the dynamical behavior of the closed-loop
Master-Slave system), and numerical results (29)–
(30) for the controller and observer gains respectively,
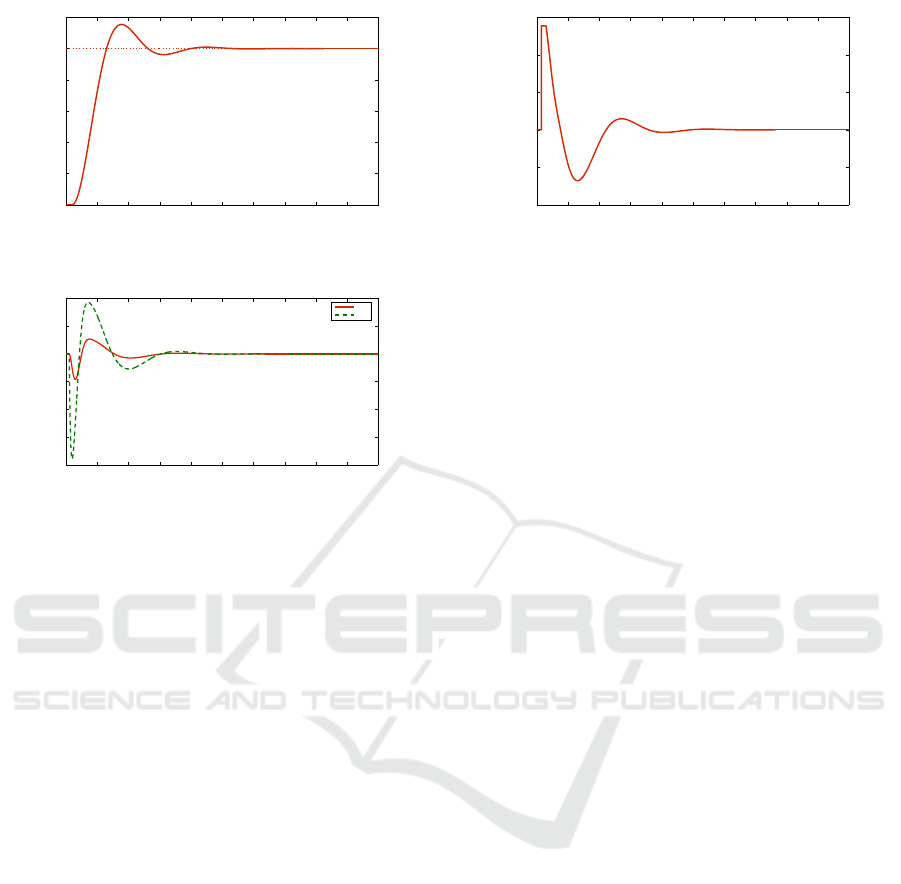
we then obtain the simulation results of figures 4 and
5 (for delays h
1
= 0.3s, h
2
= 0.25s). Figure (4) rep-
resents the ball position on the beam axis when deal-
ing with a step response of the closed-loop system
OBSERVER-BASED STATE FEEDBACK REMOTE CONTROL WITH BOUNDED TIME-VARYING DELAYS
141
0 2 4 6 8 10 12 14 16 18 20
0
0.02
0.04
0.06
0.08
0.1
0.12
t(time sec)
The ball position on the beam
axis : X(m)
Figure 4: Step response of the closed-loop system.
0 2 4 6 8 10 12 14 16 18 20
−8
−6
−4
−2
0
2
4
x 10
−3
t(time sec)
Estimation errors : e1(t) and e2(t)
e1(t)
e2(t)
Figure 5: Estimation error ˆx(t) − x(t).
with a step magnitude 0.1 m, while Figure (5) repre-
sents the observations errors e
1
(t) = ˆx
x
(t) − x
x
(t) and
e
2
(t) = ˆx
v
(t) − x
v
(t). Moreover, Figure (6) shows the
corresponding delayed control input.
By looking at these simulations results, we can see
that the Luenberger-type observer insure the asymp-
totic convergence of the estimation error towards
zero, while the state-feedback control guarantees the
asymptotic stability of the closed-loop system, what-
ever the presence non-symmetric delays τ
1
6= τ
2
in the
control and feedback loops.
6 CONCLUSIONS
This paper has dealt with the stabilization problem
of a Networked Control System with a TCP network
as communication media. In particular, our attention
was focusing on a Master-Slave setup with uncertain,
time-varying, ”non-small”, non-symmetric transmis-
sion delays affecting the Slave control input and its
transmitted (scalar) output. A main feature of our
work was the use of a Lyapunov-Krasovskii func-
tional derived from a descriptor model transforma-
tion, to give rise to some conditions for the design
of an observer-based state-feedback control. In future
works, we will study the stability of Networked Con-
trol Systems with both delays and packet dropping.
0 2 4 6 8 10 12 14 16 18 20
−0.01
−0.005
0
0.005
0.01
0.015
t(time sec)
The corresponding delayed control
Figure 6: The corresponding delayed control input.
REFERENCES
Fridman, E. (2004). Stability of linear functional differen-
tial equations: A new lyapunov technique. In Proc. of
the Mathematical Theory of Networks and Systems.
Fridman, E. and Shaked, U. (2002). An improved stabi-
lization method for linear time-delay systems. IEEE
Transactions on Automatic, 47:1931–1937.
Ge, Y., Tian, L., and Liu, Z. (2007). Survey on the stabil-
ity of networked control systems. Journal of Control
Theory and Applications, 5(4):374–379.
Hespanha, J., Naghshtabrizi, P., and Xu, Y. (2007). A sur-
vey of recent results in networked control systems.
Proceedings of the IEEE, 95(1):138–162.
Luenberger, D. (1971). An introduction to observers. IEEE
Trans. on Automatic Control, AC-16(6):596–602.
Moon, Y., Park, P., Kwon, W., and Lee, Y. (2001). Delay-
dependent robust stabilization of uncertain state de-
layed systems. Int. J. of Contr, 74:1447–1455.
Niculescu, S.-I. (2001). Delay Effects on Stability. LNCIS
No.269, Springer.
Richard, J.-P. (2004). Time delay systems: an overview of
some recent advances and open problems. Automat-
ica, 39:1667–1694.
Shustin, E. and Fridman, E. (2007). On delay-derivative-
dependent stability of systems with fast-varying de-
lays. Automatica, 43:1649–1655.
Suplin, V., Fridman, E., and E Shaked, U. (2004). h
∞
con-
trol of linear uncertain time-delay systems- a projec-
tion approach. In Proc. of the CDC.
Tang, X. and Yu, J. (2007). Networked Control System: Sur-
vey and Directions, pages 473–481. Springer edition.
Tipsuwan, Y. and Chow, M.-Y. (2003). Control methodolo-
gies in networked control systems. Control Engineer-
ing Practice, 11(10):1099–1111.
Witrant, E., Canudas de Wit, C., and Alamir, M. (2003).
Remote output stabilization under two channels time-
varying delays. In Proc. of the 4th IFAC Workshop on
Time Delay Systems.
Yang, T. (2006). Networked control system : A brief survey.
Control theory and applications (IEEE proceedings),
153(4):403–412.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
142
