
A NOVEL POTENTIAL FIELD ALGORITHM AND AN
INTELLIGENT MULTI-CLASSIFIER FOR THE AUTOMATED
CONTROL AND GUIDANCE SYSTEM (ACOS)
Thomas Statheros, Gareth Howells, Pierre Lorrentz
Department of Electronics,University of Kent, Canterbury, Kent, U.K.
Klaus McDonald-Maier
School of Computer Science and Electronic Engineering, University of Essex, Colchester, U.K.
Keywords: Autonomous Intelligent Guidance, Potential Field Algorithms, Weightless Neural Systems.
Abstract: The ACOS project seeks to improve and develop novel robot guidance and control systems integrating
Novel Potential Field autonomous navigation techniques, multi-classifier design with direct hardware
implementation. The project development brings together a number of complementary technologies to form
an overall enhanced system. The work is aimed at guidance and collision avoidance control systems for
applications in air, land and water based vehicles for passengers and freight. Specifically, the paper
addresses the generic nature of the previously presented novel Potential Field Algorithm based on the
combination of the associated rule based mathematical algorithm and the concept of potential field. The
generic nature of the algorithm allows it to be efficient, not only when applied to multi-autonomous robots,
but also when applied to collision avoidance between a single autonomous agent and an obstacle displaying
random velocity. In addition, the mathematical complexity, which is inherent when a large number of
autonomous vehicles and dynamic obstacles are present, is reduced via the incorporation of an intelligent
weightless multi-classifier system which is also presented.
1 INTRODUCTION
This paper presents additional novel algorithms,
methods and technologies adapted by the ACOS
automated guidance system (Statheros, 2006) for
collision free autonomous navigation, not only in a
single autonomous manner, as initially presented in
(Statheros et. al., 2006), but also for multi-
autonomous vehicles in the presence of independent
dynamic obstacles.. The technologies employed fall
into three major categories: Novel Potential Field
autonomous navigation techniques, multi-classifier
design and direct hardware implementation. This
paper presents an overview, further development and
ideas regarding the integration of these technologies
within the ACOS system. The paper presents the
novel features of the Potential Field methodology
described in (Statheros 2007), and also the new
concept of Trajectory Equilibrium State (TES)
between a potential field autonomous vehicle and a
dynamic obstacle. In addition, we propose the
combination of the multi-classifier with the novel
potential field algorithm in a new hybrid navigation
system. This is followed by a description of the
multi-classifier framework employed by ACOS
which utilises weightless neural network technology
allowing a rapid adaptable learning environment and
facilitating efficient direct hardware implementation.
The multi-classifier additionally possesses the
desirable properties of 1) a capacity to implicitly
adapt to the relative discriminant abilities of its
component classifiers and 2) be able to accept both
absolute and probability based classifications from
its component classifiers.
337
Statheros T., Howells G., Lorrentz P. and McDonald-Maier K.
A NOVEL POTENTIAL FIELD ALGORITHM AND AN INTELLIGENT MULTI-CLASSIFIER FOR THE AUTOMATED CONTROL AND GUIDANCE SYSTEM (ACOS).
DOI: 10.5220/0002171203370342
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-8111-99-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 NOVEL POTENTIAL FIELD
METHOD FOR
MULTI-AUTONOMOUS
VEHICLE NAVIGATION
A major part of ACOS work for autonomous
navigation is based on novel potential field
algorithmic methodology improving both single and
multi-autonomous vehicle navigation (Statheros
2007). The generic concept of “artificial potential
fields” originates from (Khatib, 1985). This study
introduces the potential field method (PFM) for real-
time obstacle avoidance for both manipulators and
mobile robots. In later years PFM quickly gained
popularity for autonomous vehicle navigation
because of its elegance and simplicity. A Widely
used PFM for mobile robot real-time obstacle
avoidance is termed Virtual Force Field (VFF)
(Borenstein, 1989, 1990). The VFF method has also
been utilised in complex hybrid systems for air, land
and water based autonomous navigation. A number
of VFF algorithms specialised in water based
navigation are briefly explained in (Statheros, 2008).
However, Artificial potential field based
algorithms experience local minima traps, which
cause autonomous vehicle’s trajectory deadlocks
and/or oscillations (Koren 1991). This problem can
be resolved by PFM in integration with intelligent
methods and/or mathematical navigational
algorithms.
In recent years potential field algorithms have
also gained popularity in the field of multi-
autonomous navigation (Pradhan 2006, Masoud
2007). In (Statheros 2007) a novel multi-
autonomous navigation algorithm enables a simple
VFF algorithm to navigate local multi-autonomous
independent vehicles exceptionally efficient in terms
of trajectory length, trajectory smoothness and time
of arrival. This approach uses a novel rule-based
mathematical algorithm and the newly defined
concept of trajectory equilibrium state (TES).
2.1 VFF Trajectory Equilibrium State
In a multi-mobile robot environment where the
robots are guided by the VFF method, in which the
virtual repulsive force is described in (Statheros
2007), we can observe the Trajectory Equilibrium
State (TES) as shown in Figure 1. Here, we observe
that the robot trajectories cross at point C to reach
their target destinations in straight line trajectories.
However, with VFF, the trajectory diversion leads to
autonomous navigational deadlock and both robots
stop at points D and E without reaching their target
destinations T1 and T2. We can define the distance
DE as
Saturation
D , the minimum distance they may
have between them. The robots will only stop
without reaching their target destination in Absolute
TES. Where equation (2) is not fully satisfied but
equation (1) is satisfied, we define the state as Close
TES.
Saturation Efficiency
DDD
≤
< (1)
A
CBC
=
and
12
VV= (2)
In equation 1,
Efficiency
D is the minimum distance
between the two robots so the non-linear effect of
the equation 1 is not apparent. Where V1 is the
speed of mobile robot 1 and V2 is the speed of
mobile robot 2.
As stated above, the TES causes trajectory
inefficiencies such as long and curved power
consuming trajectories for all the guided robots. In
the most extreme case, absolute TES, both robots
divert from their target destination and the distance
between them decreases to the point where the
resultant force vectors are equal to zero. The
Absolute TES has been identified utilizing two
mobile robots in (Statheros 2007).
Figure 1: Two mobile robots at Absolute Trajectory
Equilibrium State (TES).
2.2 TES Detection and Avoidance
The TES detection and avoidance algorithm predicts
and prevents Absolute and Close TES. This
algorithm maintains close to straight line efficient
trajectories for the robots in cases of possible
collision by adjusting separately their speeds. The
performance of this algorithm is demonstrated in
Figure 2.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
338
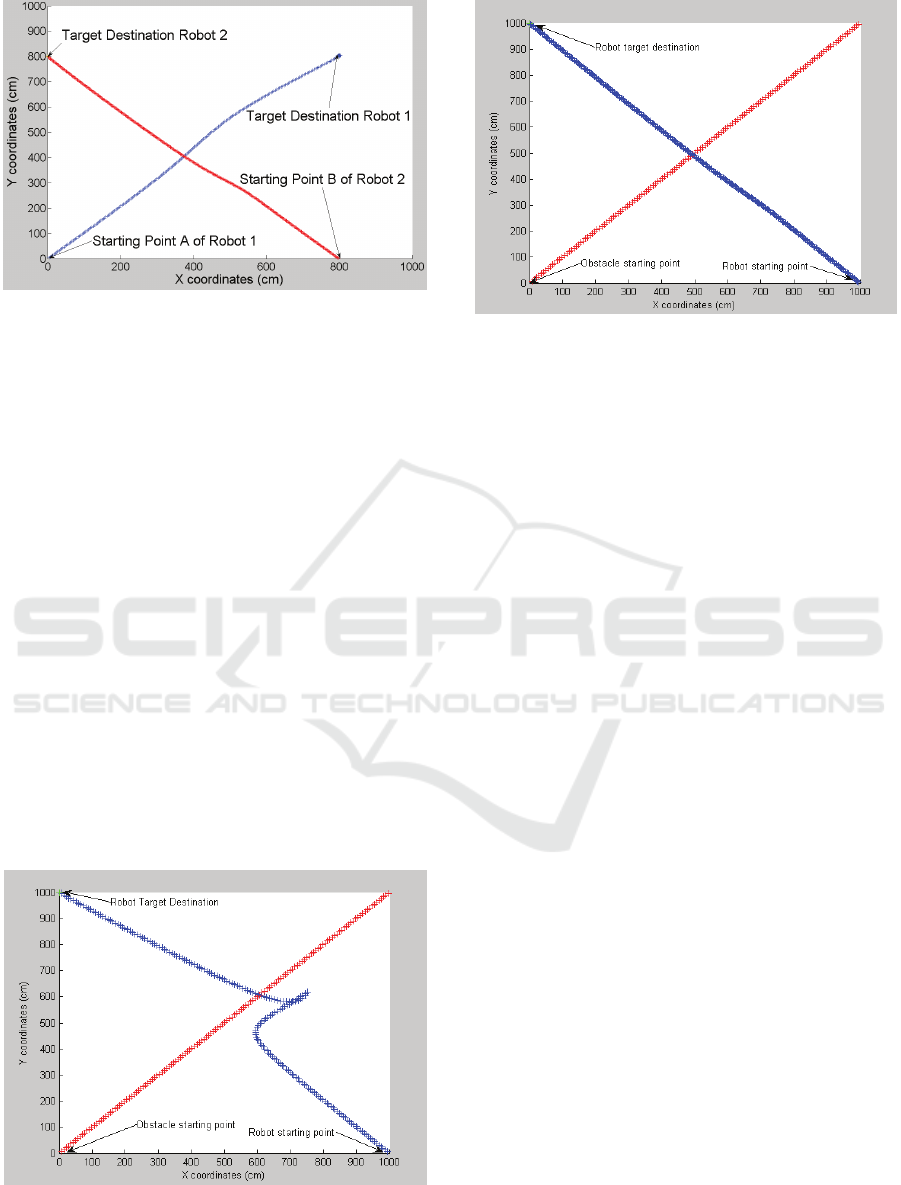
Figure 2: Two mobile robots close-optimum trajectories
due to TES Detection and Avoidance algorithm in case of
Absolute TES.
The above has introduced the concept of guiding
independently multi-autonomous robots or vehicles
with identical algorithmic principle with exceptional
efficiency. However, in this paper, we have
identified that the above algorithm is more generic
in nature, as it may also be applied to dynamic
obstacles. For example, in Figure 3, a collision
scenario is presented between a dynamic obstacle
and a standard potential field guided robot. In this
case, we can consider a new concept of TES
between a potential field robot and a dynamic
obstacle. This TES forces the potential field guided
robot to divert from its target destination and follow
the inefficient trajectory shown in figure 3. The TES
detection and avoidance algorithm can also be
applied in this case. The algorithm incorporates a
velocity variation of the autonomous guided robot
based on the potential field algorithm dynamics. The
effectiveness of the algorithm is displayed in Figure
4, where the autonomous vehicle follows a near
optimum straight line trajectory.
Figure 3: Standard Potential Field robot with dynamic
obstacle.
Figure 4: The effect of TES Detection and Avoidance
algorithm when a Potential Field robot is in TES with a
dynamic obstacle.
The processing requirements of the above
algorithm increase in a presence of a large number
of autonomous vehicles and/or dynamic obstacles.
We can reduce its processing load by focusing the
algorithm onto a group of similarly behaving
dynamic vehicles and/or obstacles that are
recognised by an intelligent multi-classifier, which
we present in the next section. This is possible due
to the patterns of location, direction, speed and
potential field algorithm dynamics, which are
generated from the autonomous vehicles and/or
dynamic obstacle in the same local navigation
environment).
3 THE INTELLIGENT
FAST-LEARNING
MULTI-CLASSIFIER SYSTEM
Modern intelligent Robotic Guidance systems are
being employed in practical application domains
where the required performance level often exceeds
that achievable from a single guidance paradigm
typically because the complexity of the problem is
such that too many potential outcomes are present,
equivalent to the number of pattern classes when the
system is viewed as a pattern recognition problem.
To address this issue, current systems often
concurrently employ a number of distinct classifiers,
where the component classifiers are trained on a
subset of situation which the robotic system may
encounter in practice. Therefore, the component
classifiers will possess the ability to distinguish well
between certain situations but will be unable to offer
the same distinguishing pattern classification
performance over the entire range of scenarios
A NOVEL POTENTIAL FIELD ALGORITHM AND AN INTELLIGENT MULTI-CLASSIFIER FOR THE
AUTOMATED CONTROL AND GUIDANCE SYSTEM (ACOS)
339

specific to the problem domain because they are
unaware of all possible situations. In such
circumstances, engineering a solution to a practical
problem is reduced to a selection process of
available classifiers where the combination of the
classifiers chosen is able to distinguish the entire set
of pattern classes present within the problem
domain. A combiner classifier is required in addition
which is trained on the outputs of the component, or
base, classifiers and makes an overall decision.
The ACOS system utilises an intelligent multi-
classifier combiner system which is able to
automatically assimilate outputs of component
system classifiers which are inaccurate due to their
restricted training knowledge and produce a single
classification for a given classification instance The
system possesses the following significant
properties:-
• All base classifiers and the combiner classifier
follow a generic architecture based on the
Probabilistic Convergent Network (PCN)
(Howells 2000, Lorrentz 2007).
• The significance of the classification decision of
a given classifier is varied according to the likely
pattern classes under consideration. Therefore, a
classifier which possesses good knowledge of the
scenario in question is able to provide a strong
weighted decision which is utilised by the
combiner network. Conversely, when an
unfamiliar scenario is encountered, a low
weighted incorrect decision is produced due to
the unfamiliarity of the classifier with the true
scenario.
• The multi-classifier system possesses fast
learning properties so that the significance of
class distinguishing properties are immediately
accepted by the system
• The system is problem domain independent and
may be adapted to a large number of automated
navigation based scenarios.
• The system uses simple logic operations to guide
its decision making process and it is thus suitable
for fast direct hardware based implementation
As stated, the proposed technique employs a type
of weightless artificial neural system known as the
Probabilistic Convergent Network (PCN) to
assimilate the classification potential of each of the
component classifiers employed in a given situation.
The PCN network architecture (Howells 2000,
Lorrentz 2007). is designed to provide an extended
recognition information base to the user whilst
retaining the training and performance potential
achieved with previous Weightless architectures
(Austin 1998). An example PCN architecture is
illustrated in Figure 5.
Figure 5: PCN Network Architecture.
The following are significant points regarding the
architecture:-
• The neurons comprising the network are
arranged in x × y matrices or layers where x and
y are the dimensions of the input sensor data
under consideration.
• Each element within the sensor data is therefore
associated with a corresponding neuron within
each layer.
• The layers comprising the network are arranged
in two groups, termed the Pre group and the
Main group. A Merge layer exists after each
group whose function is to combine the outputs
of the constituent layers of the group. The
connectivity of the neurons comprising a Merge
layer is equal to the number of layers within the
group to which it pertains.
• The merged output of the Main Group is fed
back, unmodified, to the inputs of each layer
comprising the group.
• The number of layers within each group may be
varied depending on the recognition performance
required from the network.
• The constituent layers of a group differ in the
selection of sensor data elements attached to the
inputs of their constituent neurons (termed the
connectivity pattern).
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
340
• Neurons within a given layer possess the same
connectivity pattern relative to their position
within the matrix.
The PCN architecture utilises highly efficient
training and recognition algorithms which are
detailed in (Lorrentz 2007). These allow the network
to produce weighted decisions on their output giving
a confidence level associated with the decision.
Specifically:-
• Symbols within the PCN architecture are taken
from an extended compound set.
• A given symbol is designed to contain a
component for each of the possible pattern
classes on which the network has been trained.
• Each component itself is constructed from a pre-
determined number of sub-symbols. This number
represents the number of divisions available for
each pattern class where each divisional symbol
represents a probability approximation that the
given sample pattern belongs to the given pattern
class.
The neurons comprising the network differ
between the Pre and Main groups. The Pre group
neurons take their inputs from the binary sensor
values comprising the network input data. The
contents of the memory locations of the neurons are
taken from the extended compound set of symbols
described above. The main group neurons take their
inputs and memory contents from the compound set
of symbols.
Due to the weightless nature of PCN it lends
itself to straightforward hardware implementation
that requires mainly standard memory to realise the
network structure and some limited arithmetic
resources. An enhanced version of the PCN
architecture has been prototyped and forms a
hardware fabric the for the systems implementation
(Lorrentz 2008).
The ACOS system consists of several base PCN
base classifiers based on separate scenarios which a
robot may encounter. It is infeasible to train a single
PCN classifier with a large number of scenarios due
to the exponential increase in memory required as
each neuron memory will increase in size for each
new scenario. The PCN architecture naturally lends
itself to employment as an intelligent multi-classifier
however. To achieve this end, the output
classifications of the selection of base classifiers
employed, form the input to a given combiner PCN
classifier. The outputs of the combiner PCN will
then represent a weighed classification for the
problem at hand based on the combined wisdom of
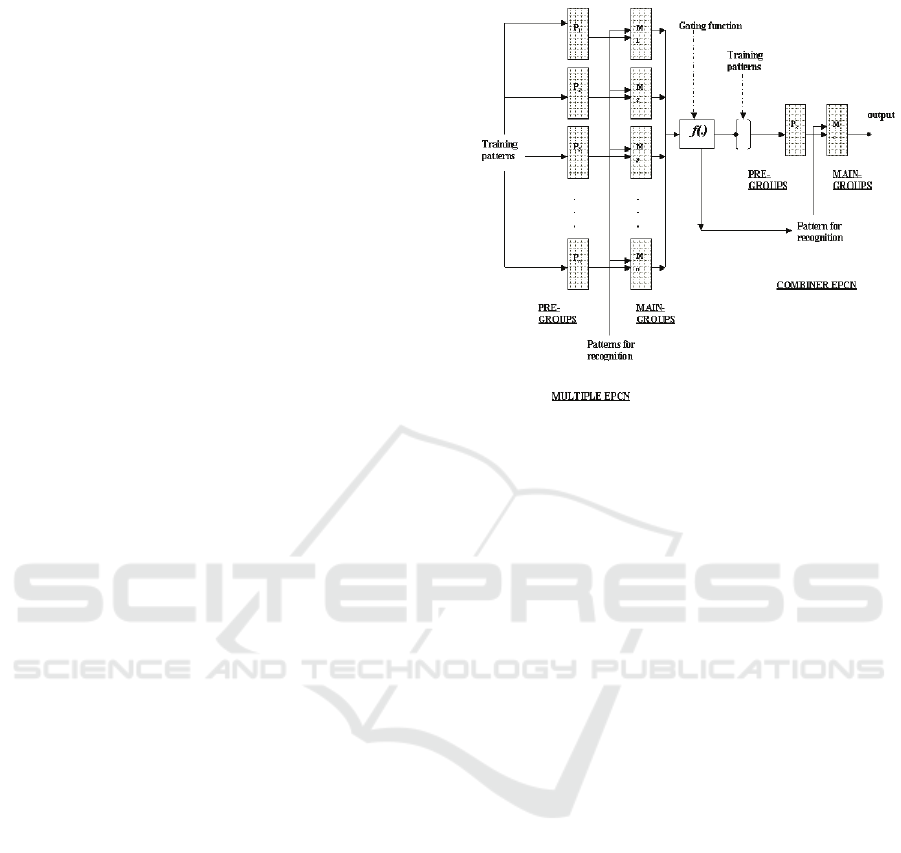
the component classifiers as illustrated in Figure 6.
Figure 6: Schematic of the PCN based Multi-Classifier.
As stated, in order to employ the PCN
architecture as a basis for a multi-classifier system, it
is necessary to combine the outputs of the
component classifiers to form a single input which
may be considered as a classification image for the
particular problem in question. The general strategy
requires the following steps to be taken:-
• Outputs of component classifiers are interpreted
as binary numbers, either indicting a single
preferred pattern class or representing a
combination of classed with associated
probabilities.
• The combiner PCN overloads the meanings of
the outputs of the component classifier in order
to address the memory scale issue associated
with the requirement that it be able to distinguish
between a large number of component decisions.
So, for example, the meaning of class decision 1
for base classifier 1 will differ from the same
output for classifier 2. However, the combiner
PCN sees a compound input pattern which
essentially represents a compressed
representation of all possible decision scenarios
with associated weightings and is able to
efficiently reach a conclusion.
• Suitable training examples must be compiled
which will allow the PCN system to distinguish
between the various scenarios. To this effect it is
a supervised learning environment.
Examples of classifications may now be
A NOVEL POTENTIAL FIELD ALGORITHM AND AN INTELLIGENT MULTI-CLASSIFIER FOR THE
AUTOMATED CONTROL AND GUIDANCE SYSTEM (ACOS)
341

presented to the PCN architecture according to the
training algorithm in (Howells 2000, Lorrentz 2007).
The system effectively relies of the fact that if a base
classifier encounters a situation with which it is
familiar (i.e. it has encountered in training), it will
produce a decision with high confidence.
Conversely, if a base classifier encounters a scenario
with which it is not familiar, it will produce a
classification from one of the scenarios which it is
familiar but with low confidence. i.e. it will produce
an erroneous but low weighted result. The combiner
PCN is able to sift these decisions and produce the
desired decisions based on their confidence rating.
4 CONCLUSIONS
The ACOS project has been successful in producing
an integrated, automated, robotic guidance system
which is highly flexible and capable of fast
autonomous learning. It has achieved its primary
aim of providing state-of-the-art knowledge on
autonomous navigation techniques and technologies
as well as a novel autonomous navigation techniques
architecture which constitutes design and
implementation suitable for industrial exploitation.
ACKNOWLEDGEMENTS
This research is supported by the European Union
ERDF Interreg IIIa scheme under the ACOS Grant.
REFERENCES
Statheros, T., Howells, G, McDonald-Maier, K.D, 2007
Trajectory equilibrium state detection and avoidance
algorithm for multi-autonomous potential field mobile
robots. Electronics Letters, 43(15): p. 799-801.
Khatib, O. 1985 Real-time obstacle avoidance for
manipulators and mobile robots. 2: p. 500.
Borenstein, J., Koren, Y. 1989. Real-time obstacle
avoidance for fast mobile robots. Systems, Man and
Cybernetics, IEEE Transactions on, 1989. 19(5): p.
1179.
Borenstein, J., Koren, Y. 1989, Real-time obstacle
avoidance for fast mobile robots in cluttered
environments. Proceedings., IEEE International
Conference on, 1990: p. 572 - 577.
Statheros, T., Howells, G, McDonald-Maier, K.D, 2008
Autonomous ship collision avoidance navigation
concepts, technologies and techniques. Journal Of
Navigation.. 61: p. 129-142.
Koren, Y., Borenstein, J., 1989. Potential field methods
and their inherent limitations for mobile robot
navigation. p. 1398.
Pradhan S.K. et al 2006, Potential field method to navigate
several mobile robots. Applied Intelligence. 25(3): p.
321-333.
Masoud, A.A., 2007. Decentralized self-organizing
potential field-based control for individually motivated
mobile agents in a cluttered environment: A vector-
harmonic potential field approach. IEEE Transactions
On Systems Man And Cybernetics Part A-Systems And
Humans,. 37(3): p. 372-390.
Statheros, T et. al., 2006. Automated Control and
Guidance System (ACOS): An overview Sixth
International Conference on Recent Advances in Soft
Computing, Canterbury, UK,
Howells, G., Fairhurst, M.C., Rahman, F. 2000
.
An
exploration of
a
new
paradigm
for
weightless
RAM-
based
neural
networks,
Connection
Science,
Vol.
12,
No.
1
pp.
65-90.
Lorrentz, P. Howells, G., McDonald-Maier, K.D., 2008:
An FPGA based adaptive weightless Neural Network
Hardware, IEEE, NASA/ESA Conference on Adaptive
Hardware and Systems 2008, AHS-2008, Noordwijk,
The Netherlands.
Austin, J. (ed.) 1998 'RAM-based Neural Networks'
World Scientific ISBN 981-02-3253-5
Lorrentz, P. Howells, G., McDonald-Maier, K.D., 2007.
Design and Analysis of a novel weightless artificial
neural based Multi-Classifier, International
Conference of Computational Intelligence and
Intelligent Systems (ICCIIS 2007), part of World
Congress on Engineering 2007 (WCE 2007), London,
UK.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
342
