
FUZZY CONTROL FOR CIRCULAR INVERTED PENDULUM
Alan Hood
1
and Umut Avci
2
1
School of Computing and Creative Technologies, University of Abertay Dundee, DD1 1HG, Scotland, U.K.
2
Deptartment of Software Engineering, Izmir University of Economics, Sakarya Street No:156, Balcova, Izmir, Turkey
Keywords: Inverted pendulum, Fuzzy Control, Non-linear Systems.
Abstract: This paper offers alternative solutions to existing problems in inverted pendulum designs. Three main
problems can be listed as limited track length, hardware complexity and inappropriate control algorithm
usage. Circularly moving cart was proposed to provide unlimited track length. In order to reduce the
hardware complexity, the system was controlled by a microcontroller. Finally, fuzzy control was used for
the control algorithm because of its efficiency, robustness and simplicity. Efficiency of the system is
presented by carrying out experiments on developed inverted pendulum control system.
1 INTRODUCTION
Inverted pendulum, used as a control system
throughout the study, is composed of a rod attached
to a moving cart. Aim of the inverted pendulum is
to stabilize the pendulum vertically by moving the
base whose action is determined by the control
algorithm. One can find different designs for
inverted pendulum in the literature like supported
inverted pendulum (Joldis, 2006), dual inverted
pendulum (Lundberg, Roberge, 2003) or 360 degree
inverted pendulum (Tsai, Lin, 2003).
Main methods used for control can be listed as
PID, genetic algorithms, rule-based learning, neural
networks and fuzzy control (Gupta, Sinha, 1995).
Fuzzy control differentiates from others because it
facilitates the modeling of complex systems as in
real world. In addition to modeling, design and
simulation of these processes can be acquired by
fuzzy logic without using complicated mathematical
models because it uses linguistic variables like in
real world to represent the systems.
(Mirza, Hussain, 1998) developed an inverted
pendulum using PID modes for non-linear systems.
(Wang et al. 2004) proposed a method to balance a
rotary inverted pendulum in the minimum time.
Fuzzy control was used in rotary pendulum
balancing problem by (Yurkovich, Widjaja, 1996).
Swing up and balancing control were applied for
several phases of the process. It was seen that fuzzy
logic provided better solution to control problem
when system constraints were fully determined.
(Ray, Das, Tyagi, 2005) used a similar approach to
balance inverted pendulum moving in a limited
track.
Most of these studies intend only balancing
pendulum without considering all limitations like
lack of memory space, excessive hardware parts
and finite track length. For this reason, this study
focuses on designing an ideal control system with
appropriate control algorithm to overcome the
abovementioned problems. The main objectives of
the study are as follows:
• Building an inverted pendulum system with
minimum hardware configuration.
• Determining the effects of control algorithm on
system control.
• Designing inverted pendulum to provide
unlimited track length.
2 SYSTEM COMPONENTS
In this section, two main parts forming the inverted
pendulum system, control method and hardware,
will be introduced in detail.
2.1 Control Method
Fuzzy controller comprises four main parts: rule-
base, fuzzification, interface mechanism and
defuzzification.
351
Hood A. and Avci U. (2009).
FUZZY CONTROL FOR CIRCULAR INVERTED PENDULUM.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 351-354
DOI: 10.5220/0002178203510354
Copyright
c
SciTePress
Error, difference between vertical and actual
position of pendulum, has major impact on control.
So, we can assign error as our first input. Change in
error defines how fast pendulum changes its
position, which is another important factor for
control. Then, change in error can be assigned as
second input.
Rules include knowledge of how system works.
Each linguistic variable takes linguistic values that
change from negative large to positive large. Since
we have two inputs and an output it is easy to list all
the rules in a tabular form as follows. One can
create the tabular form for 3 and 7 linguistic values.
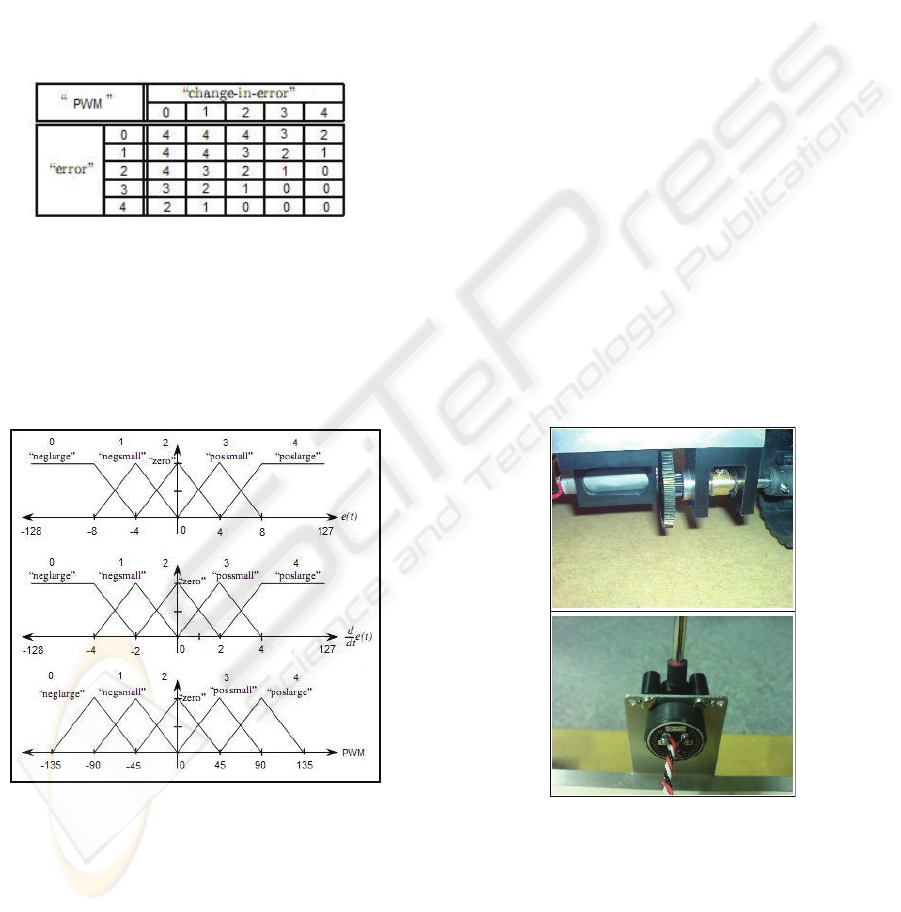
Figure 1: Rule-base with 25 rules.
In Figure 1, body represents the linguistic values
for output (PWM force), left column and top row
represent linguistic values for Error and Change in
Error respectively. Numbers represent the
magnitude of the linguistic values, i.e. “0” for
“neglarge”, “2” for zero and “4” for “poslarge”.
Figure 2: Fuzzy membership functions for 5 linguistic
values.
Mamdani type system was selected for inference
systems where minimum of the active membership
degrees were operated. Center of Gravity (COG)
defuzzification method was used because the
universe of discourse of the output PWM(force)
was continuous. As a result of this calculation, a
crisp output is produced which is the force to be
applied to DC motor at a time.
2.2 Hardware
In this stage, construction of the inverted pendulum
control system will be explained. Input signals will
be obtained from a potentiometer attached to the
pendulum. According to the inputs, the
microcontroller computes the control action and
transfers it to the manipulating element which is a
DC motor in our situation. Basic control operation
can be summarized in a number of steps. The
analog input from the potentiometer must be
converted into a digital word in order to be
processed. The microcontroller inputs these signals
periodically via its internal analog-to-digital
converter and calculates the required output. The
electrical power supplied to motor is determined by
a pulse-width modulated voltage derived using the
Pulse Width Modulation (PWM) peripheral within
the microcontroller. The current available from the
microcontroller is insufficient to drive the motor
directly so an H-bridge motor driver IC must be
used. Since the motor driver system operates at a
higher voltage than the microcontroller and a single
power supply is to be used, a step-down voltage
regulator was employed to power the
microcontroller system.
Figure 3: Geared DC motor (top) and Potentiometer
(bottom).
In order to provide unlimited track length, a
circularly moving inverted pendulum trolley was
designed in the shape of a triangle as shown in
Figure 5. Control board to be attached on pendulum
platform was a 9cm x 9cm stripboard comprising a
40 pin PIC 18F4620 microcontroller, LM7805
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
352
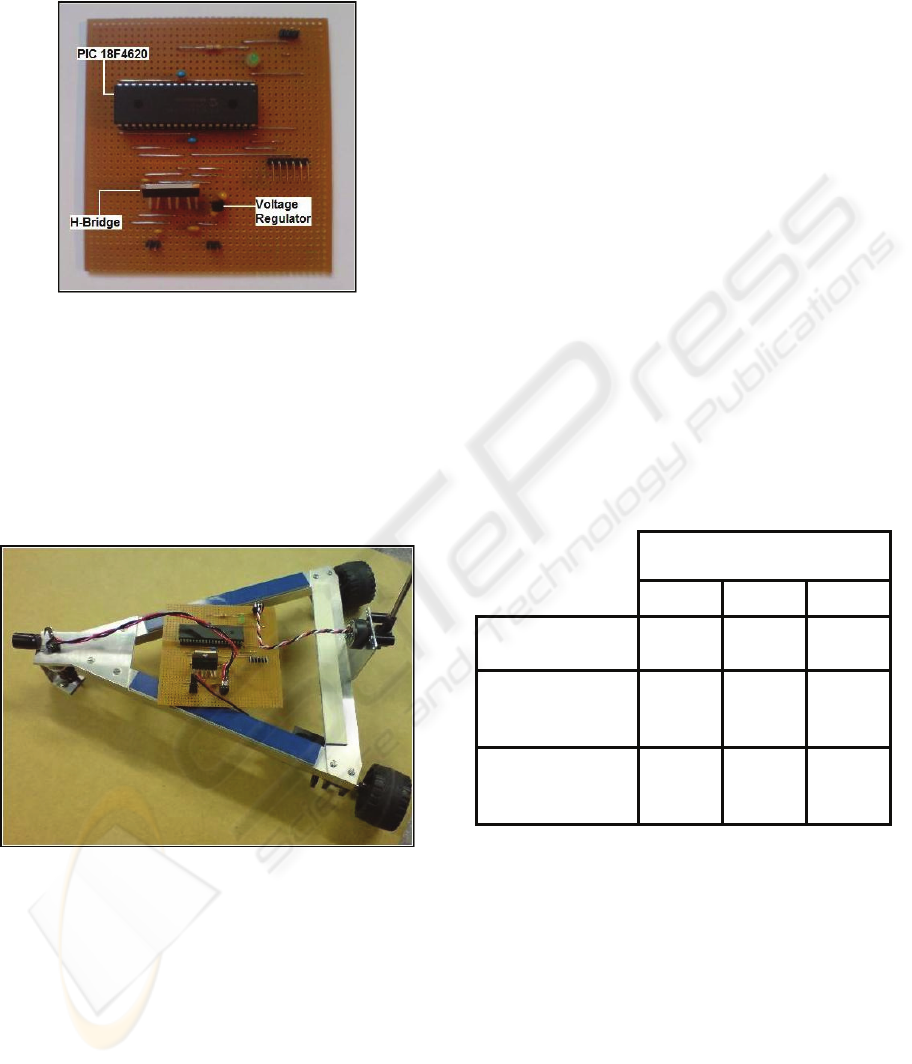
voltage regulator and L6203 H-bridge motor driver.
Using all these parts in such a small space enabled
us achieving minimum hardware object.
Figure 4: Control board.
The control board was used for three main
operations. First, voltage was regulated in order to
be used for different components throughout the
control board. Second, error was read from the pot
and transferred to microcontroller for processing.
And lastly, PWM output produced by
microcontroller was processed in H-bridge for
driving the motor.
Figure 5: Side view of the pendulum trolley.
3 PERFORMANCE
EVALUATION
For performance evaluation, three different fuzzy
controllers defined in previous phase were
embedded into inverted pendulum system one at a
time. Effects of variation in control algorithm were
observed experimentally in terms of system
oscillation, balance angles and steady state.
Number of membership functions and rule base
to be applied should be selected carefully such that
system provides low PWM output for small error
range and high PWM output for large error range.
In the first design, three membership functions for
each inputs and output were defined as well as 9
rules. For this design, system managed to lift the
pendulum up by applying high pulse to motor for
large errors. On the other hand, pendulum could not
be balanced due to high oscillation because control
action produced large PWM output even for small
errors.
Fuzzy inference system with seven membership
functions and 49 rules gave opposite results.
Control output was small enough to balance the
pendulum in very limited error angle. If pendulum
starts to move away from balance limits, motor
power is slowly increased by control action to keep
the pendulum within the boundaries. Nonetheless,
pendulum falls down to extreme edges due to
inadequate acceleration.
Final fuzzy inference system design was
composed of five membership functions and 25
rules. Advantages of the first two systems were
included in the last version that was capable of
balancing pendulum for small angles and lifting it
up for relatively large angles.
Number of Membership
Functions
3 5 7
Lifting up
angle (in degrees)
45
۫
◌-
50
۫
◌
45
۫
◌-
50
۫
◌
20
۫
◌-
25
۫
◌
Oscillation in
terms of angle (in
degrees)
45
۫
◌-
50
۫
◌
2
۫
◌-5
۫
◌ 2
۫
◌-10
۫
◌
Steady
State(S) or Dead-
Band(D)
None
Yes
(S or D)
Yes(S)
Figure 6: Performance comparison in terms of fuzzy
membership functions.
Let us look at the situation where pendulum was
balanced while platform was rotating. Main reason
of this is narrow dead-band which can be defined as
angle range at which pendulum is balanced and
motor stops. For the project, dead-band was
automatically created as narrow based on the
definitions of membership functions. Since dead-
band was small, pendulum was able to stay steady
at the points close to the range. Thus, balance is
achieved while pendulum platform rotates.
Circular movement of pendulum platform is a
FUZZY CONTROL FOR CIRCULAR INVERTED PENDULUM
353

good way for lifting the pendulum up only if
enough acceleration is provided which is dependent
on sudden change of speed. Acceleration rate can be
changed by adjusting sampling time of Error and
Change in Error. Longer sampling time results with
higher alteration rate. Nevertheless, longer sampling
time has negative effects on system control. If one
selects sampling time close or bigger than falling
time, system will not stabilize the pendulum.
Besides, higher sampling time causes oscillation in
the system between the positive and the negative
sides of the vertical because of the magnitude of the
PWM output. To solve this dilemma, appropriate
sampling time must be selected. During inverted
pendulum development process, several artificial
sampling times (30 ms, 60 ms, 125 ms, 250 ms and
500 ms) were created using delay function. Test
results indicated that oscillation decreases for
smaller sampling times. That’s why, for inverted
pendulum system the fastest internal oscillator
option was employed without any delay function to
provide the shortest calculation interval possible.
4 CONCLUSIONS
In this paper, we focus on developing an inverted
pendulum with the aim of minimizing the size and
the cost of the system structure while increasing the
reliability and performance. By using a
microcontroller, hardware requirements are greatly
reduced as well as total cost. A new approach to
inverted pendulum design is proposed so that
unlimited circular movement is assured. Fuzzy
inference system with five triangular membership
functions and 25 rules provide an appropriate way
of control as far as low memory capacity of the
microcontroller is concerned. Empirical results
show that pendulum is balanced vertically either in
steady-state or in dead-band.
Inverted pendulum control system can be
improved in a number of ways. Lifting the
pendulum up from extreme edges can be achieved
by replacing the current pendulum with a lighter
and/or shorter one. A mass can be added at the top
of the pendulum in order to provide steady
movement and to facilitate the stabilization but such
a modification changes the place of center of
gravity to a great extent. Type of the motor and size
of the wheels affect the acceleration. Motor can be
changed with a powerful one or/and size of the
wheels can be bigger to provide more speed and
acceleration correspondingly.
It is known that oscillation can be reduced by
decreasing sampling time. Lower sampling time can
be achieved by using higher processor speeds. In
the project, sampling time was determined by the 8
MHz internal oscillator. So, a crystal oscillator may
be added to system as external clock source. Such a
modification increases the processor speed from 8
MHz up to 40 MHz.
REFERENCES
Gupta, M. M., Sinha N. K. 1995. Intelligent Control
Systems. New Jersey. IEEE Press.
Joldis, A. 2006. Supported inverted pendulum, another
kind of inverted pendulum. IEEE International
Conference on Automation, Quality and Testing,
Robotics. Vol. 1. pp. 143-148.
Lundberg, K. H., Roberge, J. K. 2003. Classical dual-
inverted-pendulum control. Proceedings. 42nd IEEE
Conference on Decision and Control. Vol. 5. pp.
4399 - 4404.
Mirza, A., Hussain, S. 1998. Robust controller for
nonlinear and unstable systems: inverted pendulum.
Journal of AMSE. Vol. 55. No. 3,4.
Ray, G., Das, S. K., Tyagi, B., 2005. Stabilization of
Inverted Pendulum via Fuzzy Control, IE(I) Journal–
EL.
Tsai, F. K., Lin, J.S. 2003. Backstepping Control Design
of 360-Degree Inverted Pendulum Systems.
Automatic Control Conference. pp. 138 – 143.
Wang, Z., Chen, Y., Fang, N., 2004. Minimum-time
swing-up of a rotary inverted pendulum by iterative
impulsive control. Proceedings of the 2004 American
Control Conference. Vol. 2. pp. 1335 – 1340.
Yurkovich, S., Widjaja, M., 1996. Fuzzy controller
synthesis for an inverted pendulum system. Control
Engineering Practice. Vol. 4. Issue 4. pp. 455-469.
Microchip PIC18F4620 Data Sheet. [online].
Available from:
http://ww1.microchip.com/downloads/en/DeviceDoc/396
26e.pdf
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
354
