
ONLINE CALIBRATION OF ONE-DIMENSIONAL SENSORS
FOR ROBOT MANIPULATION TASKS
Jan Deiterding and Dominik Henrich
Lehrstuhl für Angewandte Informatik III
Universität Bayreuth, D-95440 Bayreuth, Germany
Keywords: Learning and adaptive systems, Architectures and programming, Compliant assembly.
Abstract: The purpose of this paper is to enable a developer to easily employ external sensors emitting a one-
dimensional signal for flexible robot manipulation. To achieve this, the sensor must be calibrated using data
tuples describing the relation between the positional change of the supervised object and the resulting
sensor value. This information is used for adaptation methods, thus enabling robots to react flexibly to
changes such as workspace variations or object drifts. We present a sensor-independent method to
incrementally generate new data tuples describing this relation during multiple task executions. This
method is based on the Secant method and is the only generally applicable solution to this problem. The
method can be integrated easily into robot programs without detailed knowledge about its functionality.
1 INTRODUCTION
Industrial robots are able to perform complex tasks
with utmost precision and at high speed without
exhibiting symptoms of fatigue. However, these
tasks are nearly always executed in a fixed
environment, i.e. the precision is achieved by
ensuring that all objects are placed in exactly the
same position every time. All parts must have the
same dimension, position, orientation, etc. Only by
employing external sensors such as vision or
force/torque sensors, a robot can deal with
imprecisions and variations in objects and the
environment. When designing such programs for
more flexible robots, a developer faces the problem
of determining the relation between the sensor value
obtained and the actual physical variation of the
supervised object.
The task is to find a change function that
transforms sensor values into Cartesian descriptions
of the change in order to successfully deal with
these. The classical approach is to analytically
determine a function describing this mapping.
However, for complex sensors this task quickly
becomes difficult and it is sometimes simply not
possible to find an analytical solution if the
underlying physical principles are unknown to the
developer. In these cases data tuples describing the
relation between the positional change of an object
and the resulting sensor value are recorded and a
selected type of function is fitted to these tuples.
These approaches require a large amount of analysis
and programming before the robot executes the task
for the very first time. Another downside is, that this
pre-calculated solution is fixed and prevents the
robot from adapting to changes of the environment.
For example, the robot must be stopped and re-
calibrated if a drift in the workspace or the sensor
system occurs. The advantage in the use of change
functions is that an additional layer of abstraction is
introduced. The program can be designed
independent from the actual sensor because all
workspace changes are described in Cartesian
coordinates. Now, we may replace the sensor with a
different one using another measuring principle and
– as long as the change function is correct – no
alterations have to be made to the program. General
features of change functions are described in
(Deiterding, 08) and a general outline to determine
these functions is given, but no generally applicable
method is presented to calibrate sensors iteratively
during the execution of a robot manipulation task.
In this paper, we focus on sensors emitting one-
dimensional signals, such as distance or force/torque
sensors. We do not deal with imaging sensors as this
class of sensors usually requires an upstream pattern
matching algorithm to distinguish the relevant
information from background data. We show how
calibration data for a change function can be
387
Deiterding J. and Henrich D. (2009).
ONLINE CALIBRATION OF ONE-DIMENSIONAL SENSORS FOR ROBOT MANIPULATION TASKS.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 387-395
DOI: 10.5220/0002181803870395
Copyright
c
SciTePress

computed iteratively during the first executions of
the task and how these methods can be integrated
easily into the programming environment, only
requiring the developer to specify a minimum of
task-dependent parameters. Additionally, we show
how the robot adaptively optimizes the task with
respect to execution time based on a steadily
improving approximation of the function.
The rest of this paper is organized as follows: In
Section 2, we give a short overview of related work
concerning this topic. In Section 3, we will outline a
framework with which a developer can create sensor
based robot programs that automatically acquire
calibration data during execution. In Section 4, we
describe which algorithms are encapsulated into this
framework and compare them with other
approaches. Section 5 describes how a typical robot
task can be solved using our approach. In the last
section, we give a short summary of our work and
discuss further steps.
2 RELATED WORK
The task of inferring information from noisy sensor
data is covered thoroughly by various books on
pattern classification, e.g. (Duda, 00). But all of
these describe methods for extracting the relevant
information from sensor values, assuming that this
information is present in the data. Multiple papers
dealing with the planning of sensing strategies for
robots exist, e.g. (Leonhard, 98), (Rui, 06). Most of
these involve a specific task (Adams, 98), (Hager,
90) or are aimed at employing multi-sensor
strategies (Bolles, 98), (Dong, 04). Various papers
deal with the use of sensors in the work cell to allow
for information retrieval (Hutchinson, 88). In
(Kriesten, 06), a general platform for sensor data
processing is proposed, but once more it is assumed
that the sensors are already capable of detecting
changes. More general discussions of employing
sensors for robot tasks can be found in (Firby, 89),
(Pfeifer, 94).
Two types of sensors are typically used for
manipulation tasks: Force/torque and vision sensors.
When force/torque sensors are employed, maps may
be created describing the measured forces with
respect to the offset to the goal position. (Chhatpar,
03) describes possibilities to either analytically
compute these maps or create them from samples.
Based on this, (Thomas, 06) shows how these maps
can be computed using CAD data of the parts
involved in the task. In both cases, the maps must be
created before the actual execution of the task and
are only valid if the parts involved are not subject to
dimensional variations. If the information is
acquired using cameras, the first step is to perform
some kind of pre-processing of the data to extract
the relevant information. To determine how this
information relates to the positional variation is once
again the task of the developer and highly dependent
on the nature of the task. Examples for information
retrieval using vision sensors are given in (Dudek,
96), (Paragios, 99) and (Wheeler, 96).
In summary, all of the papers mentioned above
either propose specific solutions for specific types of
sensors and tasks or algorithms to extract the
relevant information from the sensor signal. A
problem is that these solutions do not outline a
general approach which can be used regardless of
the type of sensor. Additionally, all papers assume
that the developer is capable of integrating the
methods into his own robot program. Unfortunately,
this is usually not the case for developers in small
and medium sized enterprises, which often possess
only basic knowledge about robot programming.
Here, we are interested in determining the
relationship between the sensor signal and the
Cartesian deviation iteratively during multiple task
executions. We want to integrate this algorithm into
an easy-to-use interface that will enable developers
having no special knowledge in robot programming
to create adaptive robot programs. We only focus on
one-dimensional data, such as distance sensors or
force/torque sensors. Vision sensors always require
some kind of pre-processing that is highly
dependent on the task.
3 INTEGRATION INTO THE
PROGRAMMING
ENVIRONMENT
In this chapter, we will explain how a developer
with minimal knowledge about sensor data
processing can easily create robot programs that
employ external sensors. We will explain which
considerations must be made by the developer, how
the program must be structured in general, and
which parameters are mandatory.
3.1 Setting Up the Workspace
The first thing a developer has to do is to decide in
which way a change can occur between consecutive
executions of the task. Based on this, a suitable
sensor must be chosen that is capable of recognizing
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
388

this change and that satisfies the requirements
imposed on change functions. Here we will only
provide a short summary, see (Deiterding, 08) for a
detailed explanation: A change function f describes
the alteration of a sensor signal when the object
supervised by the sensor has moved. It is a function
that relates a Cartesian position to a sensor value.
Using the inverse f
-1
gives us the position p
est
for the
current sensor value. Note that all functions are
defined in relation to a pre-set reference position p
ref
and a corresponding reference sensor value s
ref
. Only
the difference of the current sensor signal to s
ref
is
taken into account. This is not a limitation, but
rather a standardization of the function, so the only
root of this function is (0,0) because there is only
one reference position.
3.2 Online Computation of
Change Functions
The central idea of this paper is that the change
function f
real
, which is defined by the task and the
sensor, is unknown and cannot be calculated
analytically or approximated beforehand. Instead,
the robot will compute an approximation f
est
of f
real
online during the first executions of the task. Instead
of two separate phases – the calibration of the sensor
and the actual execution of the task – the calibration
process is encapsulated in the execution (see Figure
1). The calibration may take longer now,
nonetheless the program will work correctly right
from the very first execution. In addition the
developer will spend less time setting up the sensor
and the program is capable of adapting to changes
both in the workspace and in the sensor data, e.g.
due to a warm-up of the sensor, without the need for
a manual recalibration. The robot starts with a very
rough approximation f
est
of f
real
and refines this
approximation gradually with each execution by
incorporating newly gained information.
During execution, the robot uses f
est
-1
to react to
Cartesian changes of the supervised object. If the
object has moved away from p
ref
by x
change
to p
change
,
this is detected through the sensor value s
act
:
)(
changerealact
xfs =
(1)
Thus, the robot must modify its movement by
calculating:
))(()(
11
changerealestactest
xffsfx
est
−−
==
(2)
The stored reference position is then modified
accordingly:
estrefest
xpp
+
=
(3)
Now, the robot moves to
p
est
. If f
est
is close enough
to
f
real
then:
changeest
xx
=
(4)
Figure 1: In the classical approach to sensor-based robot
programming, the sensor is calibrated before the actual
program is executed (top). In our approach, the calibration
process is integrated into the execution cycle (bottom).
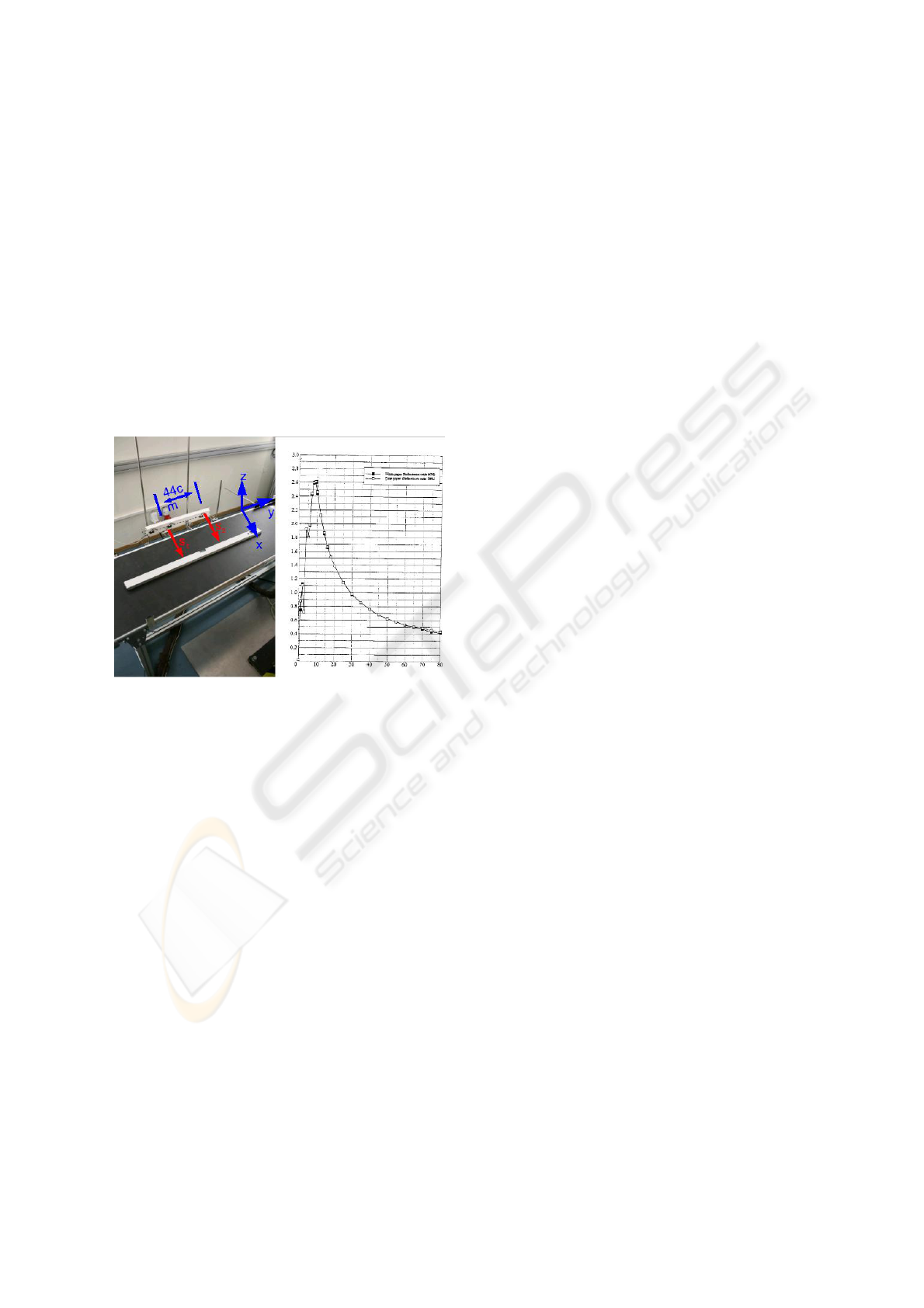
Figure 2: Experimental setup. A steel rod is delivered
along a conveyor belt (blue arrow) until it reaches a light
barrier (blue line). The rod can be in any position on the
belt (red). Shown in this picture is the reference position
of the rod in order to be picked up.
If the change was estimated correctly, this
knowledge is incorporated into the change function.
If the estimate was wrong, then there is not enough
information stored in
S to perform a reasonable
correction using the current sensor value
s
act
. Thus,
the correct position must be determined and
f
est
must
be modified in such a way that the next estimate will
be correct for the current sensor value. Initially this
will often be the case since early values of
f
est
are
quite inadequate.
When the robot has performed the motion
defined by
x
est
, the new position is either correct or it
is skewed because
f
est
was not accurate enough. In
the latter case, two possibilities arise. The key point
is to decide whether the robot motion will modify
the sensor signal or not. This is best illustrated by an
example. Consider the following task: A steel rod is
delivered to the robot via a conveyor belt. The belt
ONLINE CALIBRATION OF ONE-DIMENSIONAL SENSORS FOR ROBOT MANIPULATION TASKS
389
stops when the rod passes a light barrier (see Figure
2). The robot shall pick up the rod using a vacuum
gripper and place it in a box for transport. To solve
this task, we could construct a feeding mechanism
ensuring that the rod is aligned the same way every
time. However, we want to allow the rod to be in
any position as long as it faces upwards. So we have
translational changes along the x-axis and rotational
changes around the z-axis of the coordinate system
of the conveyor belt. To sense this misalignments,
we employ two distance sensors that are placed
parallel to the y-axis of the conveyor belt. (Figure 3)
The developer faced with the task to design this
robot program now has to plan how the position and
orientation of the rod can be recognized and how the
robot should react. So, there are two cases:
Figure 3: Left: Reference position of the rod and
placement of the distance sensors to recognize the position
and rotation of the rod on the conveyor belt. The distance
is determined using s
1
. The rotation is determined using
the difference between s
1
and s
2
. Right: Scan of the data
sheet provided by the manufacturer describing the sensor
signal for given distances (x-axis: distance, y-axis: sensor
signal). The resolution of the sensor is in the range [10;
80] cm.
Case 1) When the robot moves onto the belt to
pick up the rod, this motion does not alter the sensor
signal because the rod itself has not moved. In this
case the correct position must be searched for. This
is usually the case when preparatory sensors are
used. The developer can either manually guide the
robot to the correct position or use a second sensor
to perform an automated search, but it is up to the
developer to define a valid search algorithm,
because this depends strongly on the task. The
search should be kept as simple as possible. When
the sensor is calibrated adequately well, the change
function's estimate is accurate and always locates the
object correctly. So this search is only executed in
the very first iterations. Because of this it is not
necessary to implement a fast, efficient search
strategy, since this represents only a backup strategy
in case the change function is still inadequate for a
given sensor value. Once the correct position
p
change
has been reached,
x
change
is calculated as
refchangechange
ppx −
=
(5)
and the data tuple (
x
change
, s
act
) describes a valid data
point of
f
real
, because the sensor value has not
changed during the search. This tuple is added to a
set
S describing the current knowledge about f
real
.
With increasing size of
S more and more knowledge
about
f
real
is collected and the more precise the next
estimations will be.
Case 2) This case occurs, when the robot has
located the rod and grasped it. Now, a robot motion
will alter the sensor signal. In this case a corrective
motion can be performed instead of a search. This is
usually the case if the sensor is used concurrently.
We can employ an automated search; the direction
of the search is defined by the Cartesian coordinates
that are altered by the sensor. The search terminates
when
s
act
= s
ref
.
If this value has been reached, the
robot has corrected the change. A detailed solution
describing the motions involved is described in
Section 4.
3.3 Defining the General Program
Structure
When defining the program structure, the developer
must decide how the adaptation strategy for the
change can be integrated into the robot program.
This is done at the point when robot movements are
executed based on the sensor signal. The robot uses
the current sensor value
s
act
and current estimate of
the change function
f
est
using S to determine p
est
.
The key point is to decide whether the robot
motion will modify the sensor signal or not. This
leads to the following basic program structure:
If a motion does not change the signal, the
source code will look similar to this:
1 pos = changeFunction();
2 MOVE pos;
3 IF NOT isOkay() THEN {
4 performSearch();
5 pos = getCurrentPosition(); }
6 updateChangeFunction(pos,sensor.value());
The robot will calculate and move to the estimated
position using the change function by calling the
function
changeFunction (Lines 1 and 2). At this
point, a decision must be made if the position is
correct, which is either accomplished using a second
sensor or by asking the developer to check (Line 3).
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
390

If this is not the case, a search is initiated, guiding
the robot to the correct position (Lines 4 and 5).
Then a new data tuple is added to
S improving f
est
(Line 6) by calling
updateChangeFunction. This
must be called explicitly by the developer to update
S with the new, correct position p
real
for s
act
.
On the other hand, if a motion does change the
signal, the source code will look similar to this:
1 DO {
2 pos = getCorrection();
3 MOVE pos;
4 } WHILE sensor.value()!=s
ref
;
Here, the search is realized using a do/while-
loop. We estimate the current change (Line 2) and
move the robot accordingly (Line 3) until we have
reached the reference position (Line 4). We will
describe a suitable method to calculate reasonable
correction values in Section 4. Here, it is important
that these methods are encapsulated in the function
getCorrection, so they remain hidden from the
developer.
All the developer must do to use these methods is to
specify the following parameters:
1) The taskframe and the coordinate(s) in which the
change occurs.
p
ref
and s
ref
are calculated within
this taskframe. The default sensor values are
recorded when
p
ref
is stored.
2) The sensor used to supervise
p
ref
. This includes a
specification of the sensor’s signal-to-noise ratio
(SNR).
3) A Boolean value specifying if a robot motion will
alter the sensor signal. The function
getCorrection uses this value to determine
which estimation method is executed.
4) Furthermore, it makes sense to require all
estimates
x
est
to be within a specific range to
prevent the robot from leaving the workspace in
case of an extreme estimate. However, this may
increase the number of corrections necessary to
reach
p
ref
.
These four parameters enable the robot to learn a
change function adaptively during task execution.
All other functionality is independent from the task
and is integrated into the function
getCorrection.
The actual implementation of
f
est
is
interchangeable. The calibration data gained by the
adaptation is stored in
S. It is up to the developer to
determine how the tuples in
S are used to
approximate the function. Any interpolation method
can be employed, because no additional knowledge
about the function type of
f
est
is necessary. Curve-
fitting methods may be used as well, which will lead
to a reasonable approximation of
f
est
after fewer
executions compared to interpolation methods. But,
as is the case with all adaptation and learning
methods in general, the more information one has
available right from the start, the faster the methods
will work adequately.
4 SUPERVISING AND ADAPTING
TO CHANGES DURING
EXECUTION
In this section, we describe how corrective motions
can be executed by the robot using sensor
information gained during a movement. All
corrective motions are used to supplement the
existing knowledge about the change function. We
explain how this method can be integrated into a
programming environment and kept hidden from the
developer.
4.1 Using the Secant Method for
Corrective Motions
In principle, it is possible to use a search motion pre-
defined by the developer even if the correction has
changed the sensor signal, but this discards the
information gained by the alteration of the sensor
signal during the search. We can use this
information to our advantage and generate
corrective motions which locate
p
est
faster than a
standard search motion.
Since this correction alters the sensor signal, we
use it to judge the performed correction and
compute subsequent corrections accordingly.
Suppose we knew x
change
, the first tuple for S would
be (
x
change
, s
act
). Here, we only know s
act
, not x
change
.
But
x
change
is simultaneously the offset along the x-
axis of (
x
change
, s
act
) from the root, due to the
monotonicity of
f
est
. If we perform multiple
corrections until we reach the root, we can compute
x
change
as the sum of all corrections the robot has
made. From a mathematical point of view, this is
equivalent to finding the root of an unknown
function.
The Secant method (Press, 92) is defined by the
recurrence relation
)(
)()(
1
1
1 n
nn
nn
nn
xf
xfxf
xx
xx
−
−
+
−
−
−=
(6)
where
f is an unknown function. As can be seen
from the recurrence relation, the Secant method
requires two initial values,
x
0
and x
1
. The values x
n
of the Secant method converge to a root of
f if the
initial values
x
0
and x
1
are sufficiently close to the
ONLINE CALIBRATION OF ONE-DIMENSIONAL SENSORS FOR ROBOT MANIPULATION TASKS
391
root. The order of convergence is φ,
where
62.12/)51( ≈+=
ϕ
is the golden ratio. In
particular, the convergence is superlinear. This
result only holds true under some conditions,
namely that
f is twice continuously differentiable
and the root in question is simple and may not be a
repeated root. Change functions, as we have defined
them, fulfill these conditions.
In our case, the
f is the real change function f
real
and the first value
x
0
is simply the change we wish
to calculate,
x
change
, while the second value x
1
is the
first corrective motion the robot has performed,
x
est
,
which is based on the current estimate of the change
function
f
est
. Note that f
est
is used only once for the
initial correction, all subsequent corrections are
based on the Secant method (see Figure 4) only
using the current sensor values provided by
f
real
.
Since the convergence of this method is superlinear,
we will not need many additional corrections
x
n
, n >
1, should
x
1
prove to be poor.
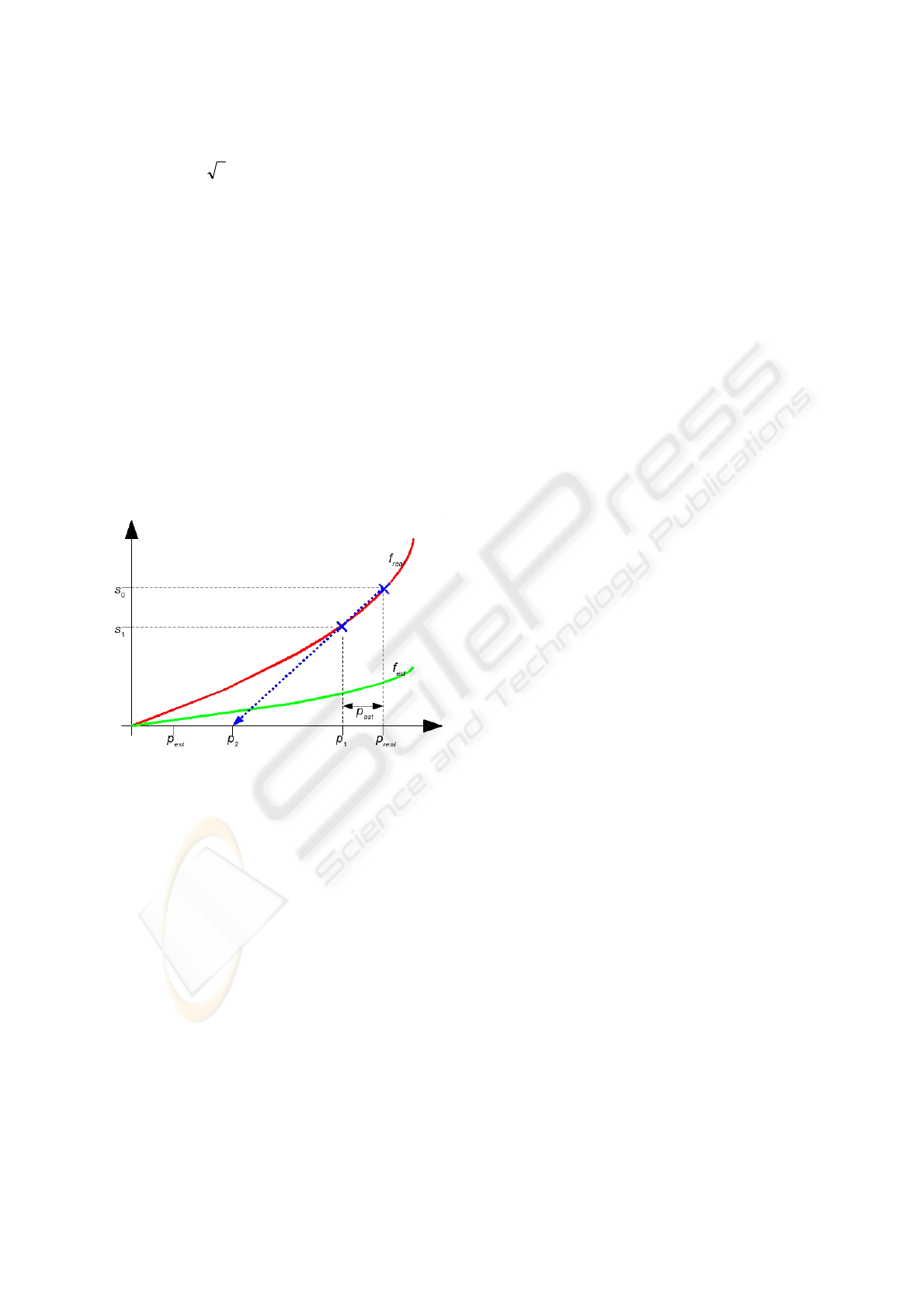
Figure 4: Illustration of the first two steps of the
correction algorithm: For a given variation p
real
we
perform an estimated correction p
est
based on the
corresponding sensor value s
0
, the real change function
f
real
(red) and our current estimate f
est
(green). We move
the robot to position p
1
and retrieve a new sensor value s
1
.
We then use the Secant method to grade the last correction
and move the robot accordingly to p
2
. All subsequent
corrections are performed using the Secant method only.
It is important to consider the following: When
the next value
x
i+1
is calculated, it must be kept in
mind that we have already performed correction
x
i
before we could measure
s
i+1
to rate x
i
. So we must
subtract the impact of
x
i
from x
i+1
.
Another advantage of this approach is that all
corrections
x
i
and corresponding sensor
values
)(
1−
=
ireali
xfs
are known. We can store these
as pairs (
x
i
, s
i
) in a temporary stack. When we have
reached
p
ref
, we can use this information to create
multiple new data tuples for
S. If we have performed
i corrections until the robot reaches p
ref
, the
topmostpair (
x
i
, s
i
) on the stack already describes a
valid data tuple for
S. The next pair on the stack (x
i-
1
, s
i-1
) describes a correction to p
ref
altered by x
i
. So
(
x
i
+ x
i-1
, s
i-1
) is another valid data tuple for the set.
Subsequent processing of the stack provides us with
a valid data tuple for every correction performed, so
we add
i new data tuples to S. This leads to an
accurate approximation of
f
est
after fewer executions
compared to the addition of only one tuple to
S in
every execution.
The Secant method only works for one-
dimensional functions. It is possible to combine
multiple sensors to obtain an
n-dimensional signal.
In this case, the Broyden method (Broyden, 65) can
be used, which is similar to the Secant method.
This method is only applicable if a robot motion
alters the sensor signal, as is described in Case 2 in
Section 3.2. In the first case of that section, there is
no other option as to use either a manual guidance
method or an automated search.
4.2 Possible Utilization of other
Approaches
The Secant method is not the only method to
determine the root of a function. Some other
methods are Newton's method, fixed point iteration,
and the bisection method. We will now compare the
Secant method with these and show why the Secant
method is the best choice for this task.
Newton's method and fixed point iteration both
use the derivative of the function to calculate the
next correction. But, as we have explained in
Section 1, it is not always possible to find an
analytical solution. Additionally, if this solution was
known, it would be more sensible to record a
number of examples before setting up the main
program and use the examples to determine the
function parameters.
The bisection method does not rely on the
function's derivative, but has another drawback: To
find the root of a function f in an interval [a, b], both
f(a) < 0 and f(b) > 0 must hold, or vice versa. If both
values are negative or positive, this method cannot
be employed. This is a serious drawback for this
case, since we cannot ensure that the first correction
we have performed will result in a new sensor value
which has the inverse sign of the first value.
In summary, we can say that to our knowledge
the Secant method is the only applicable method that
enables a robot to perform a series of corrective
motions without any need for backtracking until the
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
392

root of an unknown change function is reached.
5 EXPERIMENTS
In this section, we show the validity of our approach
and explain the interaction of all components
described in Sections 3 and 4.
We have implemented the task described in
Section 3.2. The sensors used are distance sensors
GP2D12 made by SHARP with a measurement
range of [10; 80] cm. The first sensor supervises the
position where the robot is supposed to pick up the
rod and measures the translation along the x-axis.
The second is located 44 cm away from the first
along the y-axis of the belt (Figure 3, left). The
difference between the two sensor values describes
the rotation around the z-axis.
The data sheet for the sensors shows that the
sensor signal is not linear with respect to the
physical distance (Figure 3, right), so it is not
possible to use a simple linear conversion to
determine the translation or the rotation of the rod.
In theory, the change function describing the
rotation can be derived as an Arcus-Tangens
function, but the parameters for this function are
unknown. Therefore, the robot shall learn both
functions adaptively during task execution. A
reference position pref is set up (Figure 3, left),
describing the ideal position and orientation the rod
should have. This position would be identical with
the position of the rod in case a feeding mechanism
is employed. It is important to measure the sensor
values for
p
ref
as well. Later on, all measurements
are compared against these values and if the
difference exceeds the SNR of the sensor in
question, a change is recognized. The developer
now sets up two mappings describing the changes
(Table 1).
The robot program for a single task execution is
now short and relatively simple:
1 PROGRAM pickupRod() {
2 offset
est
= getCorrection(Distance);
3 MOVE offset
est
;
4 IF (force
z-axis
() < force
contact
) THEN
5 searchRod();
6 update(Distance, HERE);
7 graspRod();
8 MOVE p
ref
;
9 DO
10 rotation
est
= getCorrection(Rotation);
11 MOVE rotation
est
;
12 WHILE (rotation
est
!= p
ref
)
13 MOVE p
dropoff
;
14 releaseRod();
15 }
Table 1: Change function mappings used for the
experiment.
Distance Rotation
Position
p
p
icku
p
p
p
icku
p
Dimension
Translation along x Rotation around z
Sensors
Sensor1 Sensor1 - Sensor2
SNR of Sensor
5.0 10.0
Movement
modifies sensor
signal
FALSE TRUE
Range of
Correction
[-240; 240] mm [-10; 10] mm
In Lines 2 and 3 the function getCorrection
receives a reference to a mapping structure defined
in Table 1 as parameter and moves the robot to the
estimated position of the rod. We use a force/torque
sensor to check whether the rod was grasped
correctly (Line 4). If this is not the case, we employ
a basic search motion probing the conveyor belt in
fixed intervals for the rod (Line 5). When the rod is
located, we manually update
S, grasp the rod and
move it to the reference position (Lines 6 to 8). At
this point the rod may still be rotated by an unknown
amount. In Lines 9 to 12 we correct this rotation by
repeatedly calling
getCorrection until the reference
position is reached. Then we move the rod to
p
dropoff
and release it (Lines 13 and 14). Note that the
program itself does not contain any sensor data
processing. Additionally, it is neither necessary for
the developer to determine the type of the change
functions nor any parameters for these functions. To
calculate the Cartesian change for an unknown
sensor value, we use a simple linear interpolation
over all data tuples in
S.
We executed the program 100 times. Every time
the translation and rotation of the rod was chosen
randomly. The initial estimate of both change
functions was deliberately chosen badly as a
bisecting line (Figure 5). For the change function
describing the distance of the rod, we could have
also created data tuples using the data sheet of the
sensor (Figure 4, right). We have chosen not to do
this, for two reasons: Firstly, the data tuples would
have to be measured manually by the developer in
the figure and modified by the distance of the rod's
default position, which is a cumbersome task.
Secondly, the data sheet is rather small and the
resolution is low so it is difficult to determine exact
values. Here, it is easier to just use a bad
approximation for the very first executions, because
this will change after a few executions. Because of
this, the robot was unable to grasp the rod correctly
ONLINE CALIBRATION OF ONE-DIMENSIONAL SENSORS FOR ROBOT MANIPULATION TASKS
393
during the very first executions and also needed
multiple corrections to compensate the rod's
rotation. After 10 executions the estimations of the
change function look similar to the one in Figure 3,
and an Arcus-Tangens function respectively (Figure
6). After 100 executions we obtained a precise
interpolation of both change functions (Figure 7),
allowing the robot to grasp the rod 20 out of 20
times (100%) without the need for a search motion.
The rotation was corrected successfully with just
one rotation in 14 out of 20 cases (75%). In the
other cases, the robot had to perform more than one
rotation to align the rod correctly.
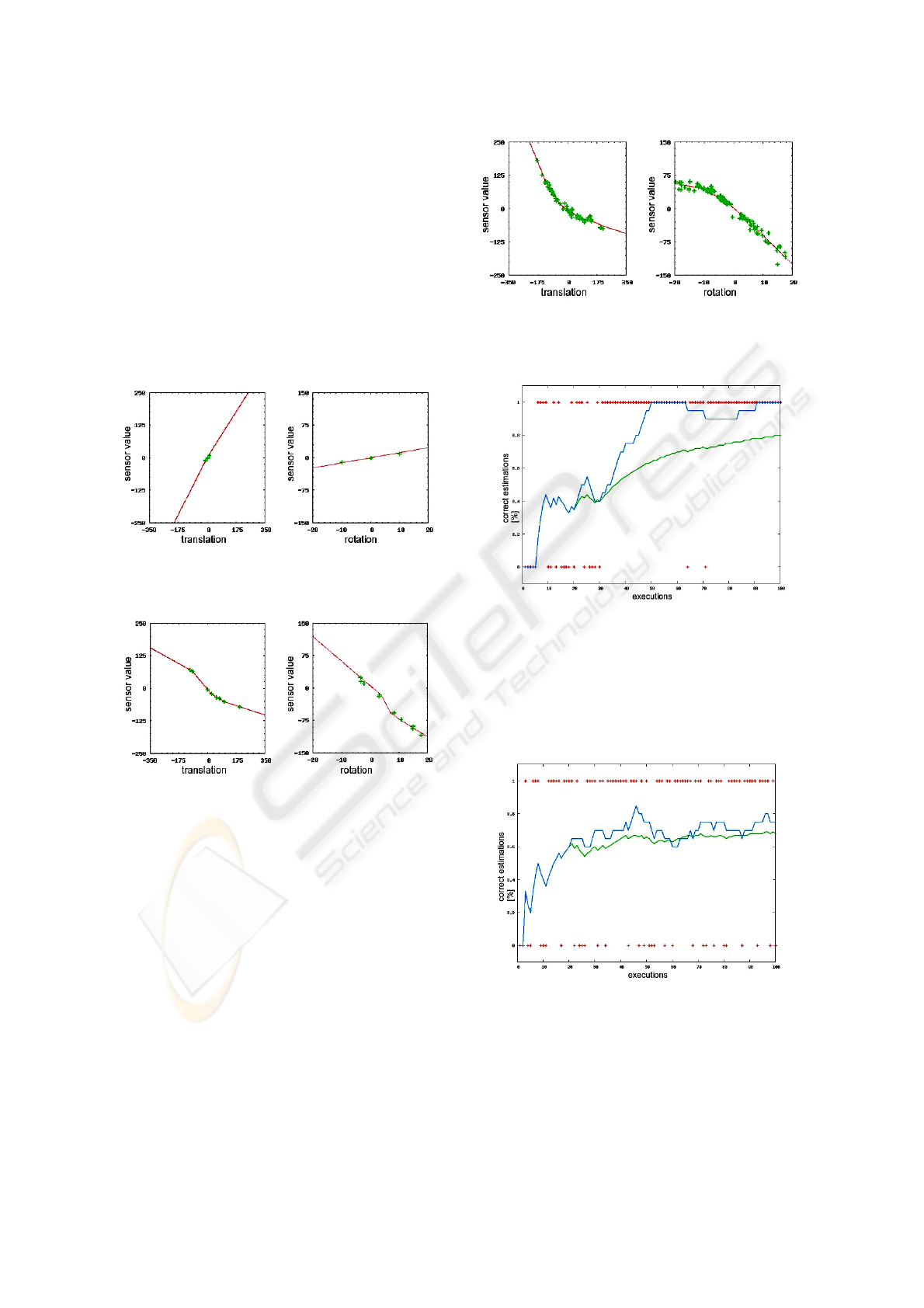
Figure 5: Initial estimates of the change functions used to
compute the translation (left) and rotation of the rod
(right).
Figure 6: Estimates of the change functions used to
compute the translation (left) and rotation of the rod
(right) after 10 executions.
The accuracy of the estimated change functions in
locating and rotating the rod during the adaptation
process is shown in Figures 8 and 9. In both figures
we show whether the robot was able to grasp the rod
and rotate it correctly using the estimates of the
change functions (red). A value of 0 means that the
robot had to search for the rod or perform multiple
rotational corrections, respectively, while a value of
1 means that the estimate was correct. The green
lines show the overall accuracy of the robot over all
task executions up to that point, while the blue lines
show the accuracy over the last 20 executions. We
can see that the robot was capable of grasping the
rod correctly nearly all the time after 50 executions,
Figure 7: Estimates of the change functions used to
compute the translation (left) and rotation of the rod
(right) after 100 executions.
Figure 8: Overall (green) and averaged (blue) percentage
of correct estimations of the rod's translation on the
conveyor belt using the change function for 100
executions. A red dot with a value of 0 indicates that the
robot could not locate the rod with the given change-
function, but had to perform a search instead. A value of 1
indicates that the rod was found without the need for a
search motion.
Figure 9: Overall (green) and averaged (blue) percentage
of correct estimations of the rod's rotation on the conveyor
belt using the change function for 100 executions. A red
dot with a value of 0 indicates that the first correction of
the rotation did not align the rod perfectly and further
corrections were necessary. A red dot with a value of 1
indicates that the rod was aligned correctly with only one
motion.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
394

and had an overall accuracy of 80%. Due to the fact
that two sensors are necessary to measure the
rotation, the SNR of this combined sensor is
relatively high, so the correction could not be
performed in one motion every time. In spite of this,
the robot was still capable of performing a perfect
correction in 75% of all cases.
6 CONCLUSIONS
The aim of this work is to enable a developer to
easily employ external sensors for flexible robot
programs. The focus of this study was to show that
data tuples describing the connection between
sensory data and positional variations can be
acquired automatically by the robot independent of
the task and without the need for intricate
calculations by the developer. We have presented a
method to determine this data online during multiple
executions of the task. The intention was to keep the
requirements and methods independent from the
type of sensor and make them universally applicable
so they can be easily incorporated into a robot
program. Finally, we presented an experiment to
validate our research. We showed that it is possible
to employ the proposed methods to successfully
determine two change functions for a pick-and-place
task.
In the next step our aim is to integrate time
stamps into the data set
S. Then we are able to deal
with drifts in the sensor data due to heating
processes of the sensor itself by discarding the older
data tuples which do not reflect the current state of
the system any more.
REFERENCES
Adams, M., “Sensor Modelling, Design and Data
Processing for Autonomous Navigation”, World
Scientific Publishing, 1998, ISBN 9810234961.
Bolles, B., Bunke, H., Christensen, H., Noltemeier, H.,
“Modelling and Planning for Sensor-Based Intelligent
Robot Systems”, Seminar on, Schloß Dagstuhl, 1998,
http://www.dagstuhl.de/Reports/98391.pdf.
Broyden, C.G., “A Class of Methods for Solving nonlinear
Simultaneous Equations”, Mathematics of
Computation, Vol. 19, No. 92. (Oct., 1965), pp. 577-
593, Jstor.
Chhatpar, S.R., Branicky, M.S. “Localization for robotic
assemblies with position uncertainty”. Proc. IEEE/RSJ
Intl. Conf. Intelligent Robots and Systems, Las Vegas,
NV, October, 2003.
Deiterding, J., Henrich, D. “Acquiring Change Models for
Sensor-Based Robot Manipulation”, Int. Conf. o.
Robotics and Automation 2008.
Dong, M., Tong, L., Sadler, B.M., “Information retrieval
and processing in sensor networks: deterministic
scheduling vs. random access”, Proc. o.t. Int. Symp.
on Information Theory, 2004. ISIT, pages 79 – 85.
Duda, R., Hart, P. and Stork, D., “Pattern Classification”,
Wiley & Sons, 2000, ISBN 0471056693.
Dudek, G., Zhang, C. “Vision-based robot localization
without explicit object models” Int. Conf. On Robotics
and Automation, 22-28 Apr 1996, ISBN 0-7803-2988-
0, pages 76-82 vol.1.
Firby, R.J. “Adaptive execution in complex dynamic
worlds”, Dissertation, Yale university, 1989,
www.uchicago.edu/users/firby/thesis/thesis.pdf.
Hager, G. “Task-Directed Sensor Fusion and Planning: A
Computational Approach”, Springer, 1990, ISBN
079239108X
Hutchinson, S.A., Cromwell, R.L. and Kak, A.C.,
“Planning sensing strategies in a robot work cell with
multi-sensor capabilities”, in. Proc. IEEE Int. Conf.
On Robotics and Automation, 1988, pages 1068-1075.
Kriesten, D., Rößler, M., et al., “Generalisierte Plattform
zur Sensordatenverarbeitung”, Dresdner Arbeitstagung
Schaltungs- und Systementwurf, 2006, http://
www.eas.iis.fhg.de/events/workshops/dass/2006/dassp
rog/pdf12_kriesten.pdf.
Leonhardt, U., Magee, J., “Multi-sensor location
tracking”, Proceedings of the 4th annual ACM/IEEE
international conference on Mobile computing and
networking, Dallas, USA, 1998, ISBN 1-58113-035-
X, pages: 203 – 214.
Paragios, N., Tziritas, G.. “Adaptive Detection and
Localization of Moving Objects in Image Sequences”
Signal Processing: Image Communication, 14:277-
296, 1999.
Pfeifer, R., Scheier, C., “From perception to action: The
right direction”, Proc. “From Perception to
Action”Conference, IEEE Computer Society Press,
Los Alamitos, 1994, pages = "1-11".
Press, W.H., Flannery, B.P., Teukolsky, S.A., Vetterling
W.T. "Secant Method, False Position Method, and
Ridders' Method." §9.2 in Numerical Recipes in
FORTRAN: The Art of Scientific Computing, 2nd ed.
Cambridge, England: Cambridge University Press,
pp.347-352, 1992.
Rui, K., Yoshifumi, M., Satoshi, M., “Information
Retrieval Platform on Sensor Network Environment”,
IPSJ SIG Technical Reports, 2006, No. 26, ISSN
0919-6072, pages 37-42.
Thomas, U., Movshyn, A., Wahl, F., “Autonomous
Execution of Robot Tasks based on Force Torque
Maps”, Proc. o. t. Jnt. Conf. on Robotics. 2006,
Munich, Germany, May 2006.
Wheeler, M. “Automatic modeling and localization for
object recognition”, Carnegie Mellon University,
Computer Science Technical Report CMU-CS-96-
118, 1996.
ONLINE CALIBRATION OF ONE-DIMENSIONAL SENSORS FOR ROBOT MANIPULATION TASKS
395
