
NOISE REDUCTION BASED ON MEDIAN ε- FILTER
Mitsuharu Matsumoto
The Education and Research Center for Frontier Science, The University of Electro-communications
1-5-1, Chofugaoka, Chofu-shi, Tokyo, 182-8585, Japan
Keywords:
Noise reduction, Median ε-filter, ε-filter, Impulse noise.
Abstract:
This paper describes a nonlinear filter, which can reduce the impulse noise with preserving the edge infor-
mation labeled median ε-filter. ε-filter is a nonlinear filter, which can reduce the small amplitude noise with
preserving the edge information. The algorithm is simple and it has many applications because it uses only
switching and linear operations. Although it is difficult to reduce the impulse noise by using ε-filter due to its
features, we can reduce the impulse noise effectively with preserving the edge information by combining the
concept of median filter and ε-filter. Due to its simple design, the calculation cost is relatively small the same
as ε-filter. To show the effectiveness of the proposed method, we also report the results of some comparative
experiments concerning the filter characteristics.
1 INTRODUCTION
Noise reduction has an important role in image pro-
cessing. Although there are many kinds of noise to be
reduced, impulse noise reduction is one of the impor-
tant topics because it appears in many practical cases
due to errors generated in noisy sensors or commu-
nication channels. Although there are many studies
to reduce the impulse type noise (Pitas and Venet-
sanopoulos, 1990), median filter is an attractive fil-
ter to reduce the impulse noise (Ko and Lee, 1991;
Brownrigg, 1984; Lin and Willson, 1988). It is simple
and effectively reduces the impulse noise. However,
as median filter smooths not only the pixels which in-
clude impulse noise but also the undistorted pixels, it
damages the good pixels.
Some researches aim to avoid the damages to the
image by combining the impulse detector and median
filter (Abreu et al., 1996; Wang and Zhang, 1999; Sun
and Neuvo, 1994; Wang and Zhang, 1998; Muneyasu
et al., 2000; Yamashita et al., 2006). Although these
approaches generally work well, the estimation error
degrades the filter performance. As these filters also
employ the learning algorithms or detecting process,
it requires much calculation cost compared to the sim-
ple median filter. They also need the noise free image
for learning.
To solve the problem, we look to a nonlinear fil-
ter labeled ε-filter (Harashima et al., 1982; Arakawa
et al., 2002; Arakawa and Okada, 2005). ε-filter is
a nonlinear filter, which can reduce the small ampli-
tude noise with preserving the edge the same as the
bilateral filter (Tomasi and Manduchi, 1998). The
algorithm is simple and the calculation cost is small
compared to bilateral filter because it requires only
switching and linear operation. Although it is diffi-
cult to reduce the impulse noise by using ε-filter due
to its design, the concept of ε-filter can be expanded
to design the improved median filter. Based on the
aspects, we propose a nonlinear filter combining the
concepts of ε-filter and median filter labeled median
ε-filter. The algorithm is simple and it can effectively
reduce the impulse noise. As it does not employ the
impulse detector, it does not require the noise free im-
age or learning process. In the next section, we first
describe the algorithm of the conventional ε-filter to
clarify its feature. In Sec.3, we describe the algorithm
of the median ε-filter. In Sec.4, we show our exper-
imental results of evaluating the filter characteristics
of median ε-filter. We also compare the filter perfor-
mance with some other filters. Conclusions follow in
Sec.5.
2 ε-FILTER
We firstly explain the algorithm of ε-filter. To clar-
ify the feature of ε-filter, we first describe the one di-
mensional case. Let us define x(k) as the input signal
(For instance, the signal including speech signal with
112
Matsumoto M. (2009).
NOISE REDUCTION BASED ON MEDIAN -FILTER.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 112-117
DOI: 10.5220/0002182701120117
Copyright
c
SciTePress

B
A
ε
ε
ε
ε
(a) Input signal
A
ε
ε
(b) In the case of ap-
plying ε-filter to the
point A
B
ε
ε
(c) In the case of ap-
plying ε-filter to the
point B
Figure 1: Basic concept of ε-filter.
noise) at time k. Let us also define y(k) as output sig-
nal of ε-filter at time k as follows:
y(k) = x(k) +
M
∑
i=−M
a(i)F(x(k+ i) − x(k)), (1)
where a(i) represents the filter coefficient. a(i) is usu-
ally constrained as follows:
M
∑
i=−M
a(i) = 1. (2)
The window size of ε-filter is 2M + 1. F(x) is the
nonlinear function described as follows:
|F(x)| ≤ ε : −∞ ≤ x ≤ ∞, (3)
where ε is the constant number. This method can re-
duce small amplitude noise while preserving the sig-
nal. For example, we can set the nonlinear function
F(x) as follows:
F(x) =
x (−ε ≤ x ≤ ε)
0 (else)
. (4)
Figure 1 shows the basic concept of ε-filter in case
that we utilize Eq.4 as F(x). Fig.1(a) shows the wave-
form of the input signal. Executing ε-filter at the point
A in Fig.1(a), we replace all the points whose differ-
ence from A is larger than ε by the value of the point
A. We then summate the signals in the same window.
Fig.1(b) shows the basic concept of this procedure. In
Fig.1(b), the dotted line represents the points whose
difference from A is larger than ε. In Fig.1(b), the
solid line represents the values replaced through this
procedure. As a result, if the difference between the
point A and the other point is large, the point is ig-
nored. On the other hand, if the difference between
the point A and the other point is small, the point is
smoothed. Because of this procedure, ε-filter reduces
the noise with preserving the precipitous attack and
decay of the speech signal, In the same way, execut-
ing ε-filter at the point B in Fig.1(a), we replace all
the points whose difference from B is larger than ε
by the value of the point B. The point is ignored
if the difference from the point B is large, while the
point is smoothed if the difference from the point B is
small. Consequently, we can reduce the small ampli-
tude noise near by the processed point while preserv-
ing the speech signal.
ε-filter can easily be improvednot only for one dimen-
sion but also for two dimension. Let us define x(k, l)
as the two dimensional input signal at (k, l). When we
apply ε-filter to two dimensional data such as image,
ε-filter is designed as follows:
y(k, l) = x(k, l) (5)
+
M
∑
i=−M
M
∑
j=−M
a(i, j)F(x(k+ i, l + j) − x(k, l)),
where a(i, j) represents the filter coefficient. a(i, j)
is usually constrained as follows:
M
∑
i=−M
M
∑
j=−M
a(i, j) = 1. (6)
The feature of two dimensional ε-filter is similar to
that of one dimensional ε-filter. We can smooth the
small amplitude noise near by the processed point
while preserving the edge. It requires less calculation
when it is compared to bilateral filter because it re-
quires only switching and linear operation. However,
it is difficult to reduce the impulse noise because of
its feature.
3 MEDIAN ε-FILTER
To reduce the impulse noise with preserving the edge
information, we combine the concept of median fil-
ter and ε-filter. In median filter, we set the adequate
window and replace the filtered point to the median
value in the window. The median filter can reduce
the impulse noise. However, the edge information is
sometimes damaged. To solve the problems, median
ε-filter is designed as follows:
y(k) = med
M
i=−M
[v(k+ i)], (7)
where med
M
i=−M
[v(k+ i)] represents the median func-
tion of v(k) from v(k − M) to v(k + M). v(k + i) is
described as follows:
v(k+ i) = x(k+ i) + F(x(k) − x(k+ i)), (8)
where F(x) is the same nonlinear function as Eq.(3)
constrained as follows:
|F(x)| ≤ ε : −∞ ≤ x ≤ ∞, (9)
NOISE REDUCTION BASED ON MEDIAN W-FILTER
113

C
A
ε
ε
ε
ε
B
Impulse noise
(a) Input signal
C
A
ε
ε
ε
ε
B
Impulse noise
Window size
(b) In the case of ap-
plying median ε-filter
to the point A
C
A
ε
ε
ε
ε
B
Impulse noise
Window size
(c) In the case of ap-
plying median ε-filter
to the point B
C
A
ε
ε
ε
ε
B
Impulse noise
Window size
(d) In the case of ap-
plying median ε-filter
to the point C
Figure 2: Basic concept of median ε-filter.
where ε is the constant number. For example, we can
set the nonlinear function F(x) similar to ε-filter as
follows:
F(x) =
x (−ε ≤ x ≤ ε)
0 (else)
. (10)
In this case, the output of median ε-filter can be de-
scribed as:
y(k) = med
M
i=−M
[v(k+ i)], (11)
where
v(k+ i) =
x(k) (|x(k + i) − x(k)| ≤ ε)
x(k+ i) (|x(k+ i) − x(k)| > ε)
.
(12)
Figure 2 shows the basic concept of median ε-filter in
case that we utilize Eq.(10) as F(x). Fig.2(a) shows
the waveform of the input signal. Executing ε-filter
at the point A in Fig.2(a), we replace all the points
where the difference from A is smaller than ε by the
value of the point A. We then apply the median fil-
ter to the signals in the same window. Fig.2(b) shows
the basic concept of this procedure. In Fig.2(b), the
dotted line represents the points where the difference
from A is smaller than ε. In Fig.2(b), the solid line
represents the values replaced through this procedure.
As the median filter outputs the median value in the
window, the input signal is basically intact when there
are many signals in the window within ε as shown in
Fig.2(b). In a similar fashion, executing ε-filter at the
point B in Fig.2(a), we replace all the points where
the difference from B is smaller than ε by the value
of the point B. In this case, although the point C is
(a) Original image of Lena. (b) Original image with
noise.
Figure 3: Original image (Lena) and input image with im-
pulse noise.
included in the window, as there are also many sig-
nals in the window within ε, the input signal is also
intact. Executing ε-filter at the pointC (Impulse noise
point) in Fig.2(a), as the differences between the point
C and the other points are larger than ε in the window,
the points within the same window are not replaced.
Hence, at the point C, median ε-filter works as a sim-
ple median filter and reduces this impulse noise. Due
to the above features, the median ε-filter can reduce
the impulse noise without damaging the good pixels.
To improve median ε-filter for two dimensional data,
we only have to design it as follows:
y(k, l) = med
M,M
i=−M, j=− M
[v(k+ i, l + j)], (13)
where
v(k+ i, l + j) = x(k + i, l + j) + F(x(k, l)−x(k+ i, l + j)).
(14)
The feature of two dimensional median ε-filter is sim-
ilar to that of one dimensional median ε-filter. The
calculation cost of median ε-filter is small the same
as ε-filter because it requires only the switching and
replacing operation. We can also reduce both im-
pulse noise and small amplitude noise with preserv-
ing edge information by combining the conventional
ε-filter and median ε-filter.
4 EXPERIMENTS
To show the effectiveness of the proposed method, we
first show the output images after the filtering. As
examples, we show the results using Lena and Boat
listed in standard image database (SIDBA). To com-
pare the effectiveness of the proposed methods to the
other methods, we also show the filter outputs of the
simple median filter and progressive switching me-
dian filter (PSMF) (Wang and Zhang, 1999). In the
experiments, we set the window size to 5 pixels ×
5 pixels. Figure 3 and Figure 5 show the examples
of Lena and Boat, respectively. They show the orig-
inal images and the input images with impulse noise
SIGMAP 2009 - International Conference on Signal Processing and Multimedia Applications
114
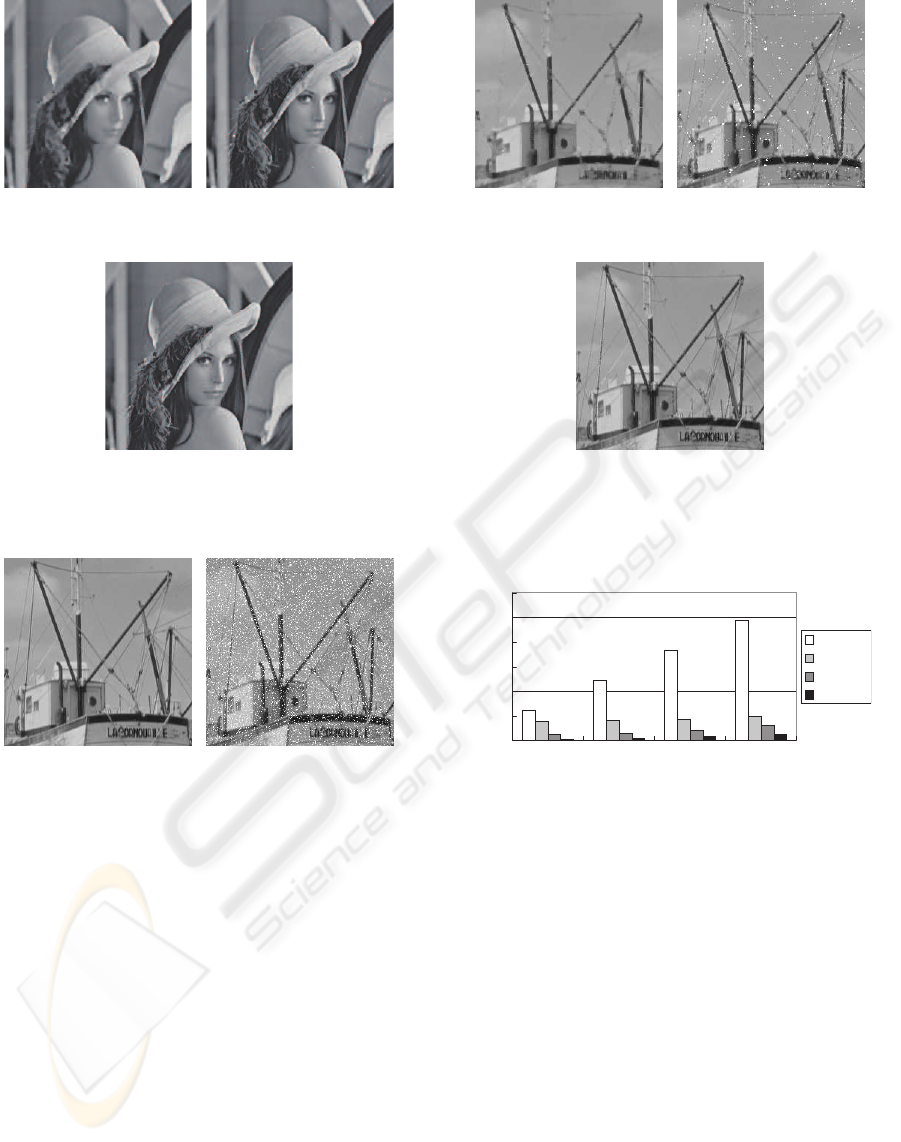
(a) Output image of me-
dian filter.
(b) Output image of pro-
gressive switching median
filter.
(c) Output image of me-
dian ε-filter.
Figure 4: Filter outputs using Lena.
(a) Original image of Boat. (b) Original image with
noise.
Figure 5: Original image (Boat) and input image with im-
pulse noise.
whose noise level is 10%, i.e. 10% pixels of the im-
age are added the impulse noise. Figure 4 and Figure
6 show the filter outputs of the simple median filter,
PSMF and the median ε-filter concerning Lena and
Boat, respectively. As shown in Figs.4(a) and 6(a),
when we employed the simple median filter, as all the
pixels were filtered, the edge information was also
damaged. When we employed the PSMF, although
the edge was preserved compared to the simple me-
dian filter, some impulse noises remained due to the
estimation error as shown in Figs.4(b) and 6(b). On
the other hand, the median ε-filter could reduce the
impulse noise without damaging the original image
information.
To clarify the effectiveness of the proposed method,
we also calculated the mean absolute error (MAE). In
the experiments, we used ten images listed in SIDBA
(a) Output image of me-
dian filter.
(b) Output image of pro-
gressive switching median
filter.
(c) Output image of me-
dian ε-filter.
Figure 6: Filter outputs using Boat.
Mean absolute error (MAE)
0
10
20
30
40
50
60
5% 10% 15% 20%
Noise level
MAE
Noisy
Median
PSMF
Proposed
Figure 7: Mean absolute error of input signal, median filter
and median ε-filter with changing the noise level from 5%
to 20%.
and changed the noise level from 5% to 20% with
5% interval. Tables 1, 2, 3, and 4 show the MAE
results when we used the input image with the im-
pulse noise whose noise level was 5%, 10%, 15% and
20%, respectively. To clarify the effectiveness of the
proposed method compared to the other methods, we
also show the average MAE. Figure 7 shows the av-
erage MAEs of input signal, median filter, PSMF and
median ε-filter. As shown in Fig.7, the MAE values
of the proposed filter are much smaller than those of
median filter in all the cases in spite of its simple de-
sign.
NOISE REDUCTION BASED ON MEDIAN W-FILTER
115

Table 1: MAE results when we added impulse noise whose
noise level is 5%.
Noisy Median PSMF Proposed
Lena 12.1282 3.9409 0.7034 0.2803
Mandrill 12.2644 12.1395 4.7043 0.6881
Airplane 12.4084 5.9639 1.8183 0.4003
Barbara 12.3033 12.4223 4.8263 0.7331
Boat 11.922 4.7659 1.0482 0.2938
Bridge 12.3889 13.1145 4.7397 0.749
Building 12.0309 7.5519 1.4239 0.453
Girl 12.3734 4.0123 0.4649 0.2812
Lax 12.5095 12.1752 5.5711 0.8165
Woman 12.3111 5.2059 1.1797 0.364
Table 2: MAE results when we added impulse noise whose
noise level is 10%.
Noisy Median PSMF Proposed
Lena 24.6922 4.3668 1.1233 0.5985
Mandrill 24.0891 12.474 5.1548 1.388
Airplane 24.4821 6.444 2.4129 0.8411
Barbara 24.3965 12.7899 5.4746 1.4835
Boat 24.2603 5.1177 1.5635 0.6371
Bridge 24.7934 13.5914 5.6281 1.6209
Building 24.6961 8.0907 1.9957 1.0329
Girl 24.8829 4.4298 0.8757 0.5783
Lax 24.4549 12.4003 5.9064 1.4839
Woman 24.0269 5.5859 1.7034 0.7206
5 CONCLUSIONS
In this paper, we proposed a nonlinear filter which can
reduce the impulse noise with preserving the image
information labeled median ε-filter. The proposed fil-
ter is simple and can reduce the noise effectively com-
pared to the simple median filter or more complicated
median filters. It does not require the noise free image
or learning process. For future works, we would like
to employ the median ε-filter for musical noise reduc-
tion by applying it to the acoustical signal in time-
frequency domain.
ACKNOWLEDGEMENTS
This research was supported by the research grant
of Support Center for Advanced Telecommunications
Technology Research (SCAT), by the research grant
of Foundation for the Fusion of Science and Tech-
nology, by the research grant of Tateisi Science and
Technology Foundation, and by the Ministry of Edu-
cation, Science, Sports and Culture, Grant-in-Aid for
Young Scientists (B), 20700168, 2008.
Table 3: MAE results when we added impulse noise whose
noise level is 15%.
Noisy Median PSMF Proposed
Lena 36.7582 4.8799 2.1492 1.006
Mandrill 36.3613 13.052 6.1686 2.2151
Airplane 37.1239 7.1861 3.3719 1.4578
Barbara 37.3263 13.3853 6.7379 2.4936
Boat 36.2212 5.7219 2.5915 1.0588
Bridge 37.1201 14.4864 6.6049 2.666
Building 36.6181 8.849 3.2259 1.6762
Girl 36.6804 4.9845 1.7034 1.0209
Lax 37.0422 13.0186 7.0353 2.3751
Woman 36.5364 6.1773 2.6824 1.1469
Table 4: MAE results when we added impulse noise whose
noise level is 20%.
Noisy Median PSMF Proposed
Lena 49.0226 5.947 4.0882 1.8503
Mandrill 49.2094 14.178 8.5962 3.4303
Airplane 49.2094 8.2621 5.7692 2.3816
Barbara 49.0226 14.3624 8.8842 3.7084
Boat 49.0109 6.637 4.6289 1.8491
Bridge 48.3533 15.9184 9.1091 4.1476
Building 48.4701 9.9992 5.6002 2.7381
Girl 49.0148 5.9428 3.5904 1.7574
Lax 49.0421 14.428 9.3909 3.957
Woman 48.2444 7.2482 4.8524 1.997
REFERENCES
Abreu, E., Lightstone, M., Mitra, S. K., and Arakawa, K.
(1996). A new efficient approach for the removal of
impulse noise from highly corrupted image. In IEEE
Transactions on Image Processing. IEEE.
Arakawa, K., Matsuura, K., Watabe, H., and Arakawa, Y.
(2002). A method of noise reduction for speech sig-
nals using component separating ε-filters. In IEICE
Transactions on Fundamentals. IEICE.
Arakawa, K. and Okada, T. (2005). ε-separating nonlinear
filter bank and its application to face image beautifica-
tion. In IEICE Transactions on Fundamentals. IEICE.
Brownrigg, D. R. K. (1984). The weighted median filter. In
Communications of the ACM. ACM.
Harashima, H., Odajima, K., Shishikui, Y., and Miyakawa,
H. (1982). ε-separating nonlinear digital filter and its
applications. In IEICE Transactions on Fundamen-
tals. IEICE.
Ko, S.-J. and Lee, Y. H. (1991). Center weighted median
filters and their application to image enhancement. In
IEEE Transactions on Circuits and Systems. IEEE.
Lin, H. and Willson, A. N. (1988). Median filter with adap-
tive length. In IEEE Transactions on Circuits and Sys-
tems. IEEE.
Muneyasu, M., Ochiai, T., and Hinamoto, T. (2000). An
implementation for switching median filters based on
SIGMAP 2009 - International Conference on Signal Processing and Multimedia Applications
116

pattern classification. In IEICE Transactions on Fun-
damentals. IEICE.
Pitas, I. and Venetsanopoulos, A. N. (1990). Nonlinear dig-
ital filters: principles and applications. Kluwer Aca-
demic Pub, USA, 1st edition.
Sun, T. and Neuvo, Y. (1994). Detail-preserving median
based filters in image processing. In Pattern recogni-
tion letters. Elsevier.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In International Conference
on Computer Vision. IEEE.
Wang, Z. and Zhang, D. (1998). Restoration of impulse
noise corrupted image using long-range correlation. In
IEEE Transactions on Signal Processing. IEEE.
Wang, Z. and Zhang, D. (1999). Progressive switching
median filter for the removal of impulse noise from
highly corrupted images. In IEEE Transactions on
Circuits and Systems. IEEE.
Yamashita, N., Ogura, M., Lu, J., Sekiya, H., and Yahagi,
T. (2006). A random-valued impulse noise detector
by using level detection. In IEICE Transactions on
Fundamentals. IEICE.
NOISE REDUCTION BASED ON MEDIAN W-FILTER
117
