
From Reactive to Deliberative Multi-agent Planning
Ammar Mohammed and Ulrich Furbach
Universit¨at Koblenz-Landau, Computer Science Department, Koblenz, Germany
Abstract. Various researches approached hybrid automata to formally model
and coordinate reactive multi-agent systems’ plans situated in a dynamic environ-
ment, where the time is critical. However in most of cases, reactivity in dynamic
environments is not satisfactory. It is favorable that agents plan their behaviors
according to some preference function. Most of current verification tools of hy-
brid automata are inadequate to model such agents’ plans. Therefore, this paper
extends hybrid automata’s decisions making by means of utility functions on tran-
sitions. A scenario taken from supply chain management is demonstrated to show
the paper’s approach. Analysis of agents’ plans are investigated using a constraint
logic program implementation prototype.
1 Motivation
Multi-agent planning [2] is a demanded task especially in a safety critical environ-
ment, where unexpected events typically arise. One key characteristics of multi-agent
planning is the nature of the environment in which the agents are involved. In realistic
problems, the environment tends to be dynamic and the behaviors of the agents change
continuously in their environment. Planning in this dynamical environment is called
continual planning [3]. Agents should engage in continual planning, if agents’ objec-
tives can evolve over time, where the purpose of the planning is to set a target that can
be achieved based on a given set of constraints at a given time. Therefore, it is becoming
increasingly important for the agents to react to the unexpected events, appeared during
the planning, in real time in order to avoid the risk that may occur during the planning.
However, agents should not only react to change those events that threaten the execu-
tion of the plan, but also coordinate for opportunities to improve the plan by taking into
account the expected future development in order to decide the most favorable course
of actions based on utility functions. Hence, there is a need to a formal way to model
and analysis the multi-agent planning in dynamical environments that combined both
aspects in a single framework.
Hybrid automata [8], on the other hand, can be used to model multi-agent systems
plans that are defined through their capability to continuously react in dynamic envi-
ronments, while respecting some time constraints. Therefore, there are researches, for
example [13,4, 5], which have proposed hybrid automata to formally model reactive
multi-agent systems [6]. There are authors, for example [10], who have approached a
simple form of hybrid automata that are called timed automata [1] to model reactive
agents. However, in reactive agents, decisions making depend entirely on the occur-
rence of events, where the agents base their next states on their current sensory events.
Mohammed A. and Furbach U. (2009).
From Reactive to Deliberative Multi-agent Planning.
In Proceedings of the 7th International Workshop on Modelling, Simulation, Verification and Validation of Enterprise Information Systems, pages 67-75
DOI: 10.5220/0002192700670075
Copyright
c
SciTePress

In contrast to reactive agents, deliberative/rational agents take into account the expected
future development in order to decide the most favorable course of actions based on
utility functions. Decisions making of deliberative agents are inadequately expressive
to hybrid automata. To our knowledge, current hybrid automata tools, like [9,7,12], do
not offer help for efficiently modeling these types of situations. Therefore, it seems to
be useful to extend hybrid automata in a way that they allow the combination of reactive
and deliberative decisions making. This combination can avoid catastrophic failure, and
provide good quality of decisions in time constrained dynamical environments. Conse-
quently, the formal verification of hybrid automata, by means of reachability analysis,
can be used as planning-problem solver, where a plan can be achieved, iff the final plan
is reachable.
To this end, this paper contributes to enhance the decision making of the hybrid
automata by coordinating their plans in dynamic environments to improve their future
outcomes . This can be accomplished by allowing discrete transitions occurring on the
basis not only of reactive decisions, but also of preference functions. We use our con-
straint logic program (CLP) implementation prototype [14]
1
to demonstrate the contri-
bution. The expressiveness of CLP facilitate this extension. Additionally, an example
taken from supply chain management in continuous dynamic environment is depicted.
As far as we know, this is the first attempt to use hybrid automata to plan multi-agent
systems with decisions making rely on a performance measurement.
In the sequel, we first introduce a case study that will be used throughout the paper
to illustrate our approachin Sec. 2. Then formaldefinitions of extended hybridautomata
are discussed in Sec. 3. Sec. 4 briefly shows the basic structure of our CLP implemen-
tation model, before showing how to specify and verify the planning requirements in
Sec. 5. Eventually, we end up with the conclusion in Sec. 6
2 Case Study
To this end, this section demonstrates a logistic scenario in a continuous dynamic envi-
ronment and shows how to specify it as hybrid automata. In this scenario, a customer
has a shipment of decayable freight items that has to be transported to some destina-
tion point. Therefore, s/he contacts a transportation service provider for this mission.
The transportation service provider, in turn, assigns a transportation truck to convey the
shipment. Assuming that the customer signs a contract with the service provider so that
the freight items have to delivered with certain threshold
θ
of items’ quality (e.g. at
most 20% putrefaction of the freight items). Otherwise, the provider has to recompense
the customer with a convenient deal. Therefore, for quality assurance and provider’s
profitable service constraints, the quality of freight items has to be monitored in the
truck during the transportation. In case of an exception (e.g. cooling temperature breaks
down), the truck has to find a suitable plan to deal with this exception, but taking into
account to utilize its transportation provider business.
1
Extended version with benchmarks results will appear in proceeding of the 7th International
Workshop on Programming Multi-Agent Systems (ProMAS 2009) at the eighth International
Joint conference on Autonomous Agents & Multi-Agent Systems (AAMAS 2009)
68
unsafe
stable
decay
System
init
Monitor
Truck
propose
init
transport estimate
w help
continuearrived
Provider
w propose to target w rescue
target
Disturbance
init
disturb
no disturb
init
error
accept
˙
D = 0
˙
D = 0
violate
finish
finish
D ≤
θ
Y := 0
˙
Y = 0
˙
Y = 0
D := 0
˙
Y = 1
erroraccept
finish
˙
Z = 0
˙
Z = 0
˙
Z = 0
˙
Z = 0
˙
Z = 1
Z := 0
cfp
accept
help
finish
finish
X := 0
˙
X = 0
˙
X = 0
˙
X = 0
˙
X = 50
˙
X = 0
X ≤ d
x
˙
X = 50
X ≤ d
x
cfp
accept
X = d
x
˙
X = 0
finish
error
rescuefinish
finish
help
Ex
T
:= f(d
x
, ˙x)
C
time
< Ex
T
finish
Z ≤ 2
Z ≥ 2
rescue
tosafeC
time
≥ Ex
T
rescued
finish
tosafe
error
tosafe
˙
D = 1.2D
D := 1.2
˙
D = 0
D ≥
θ
Y ≥ t
d
Y ≤ t
d
µ
1
µ
2
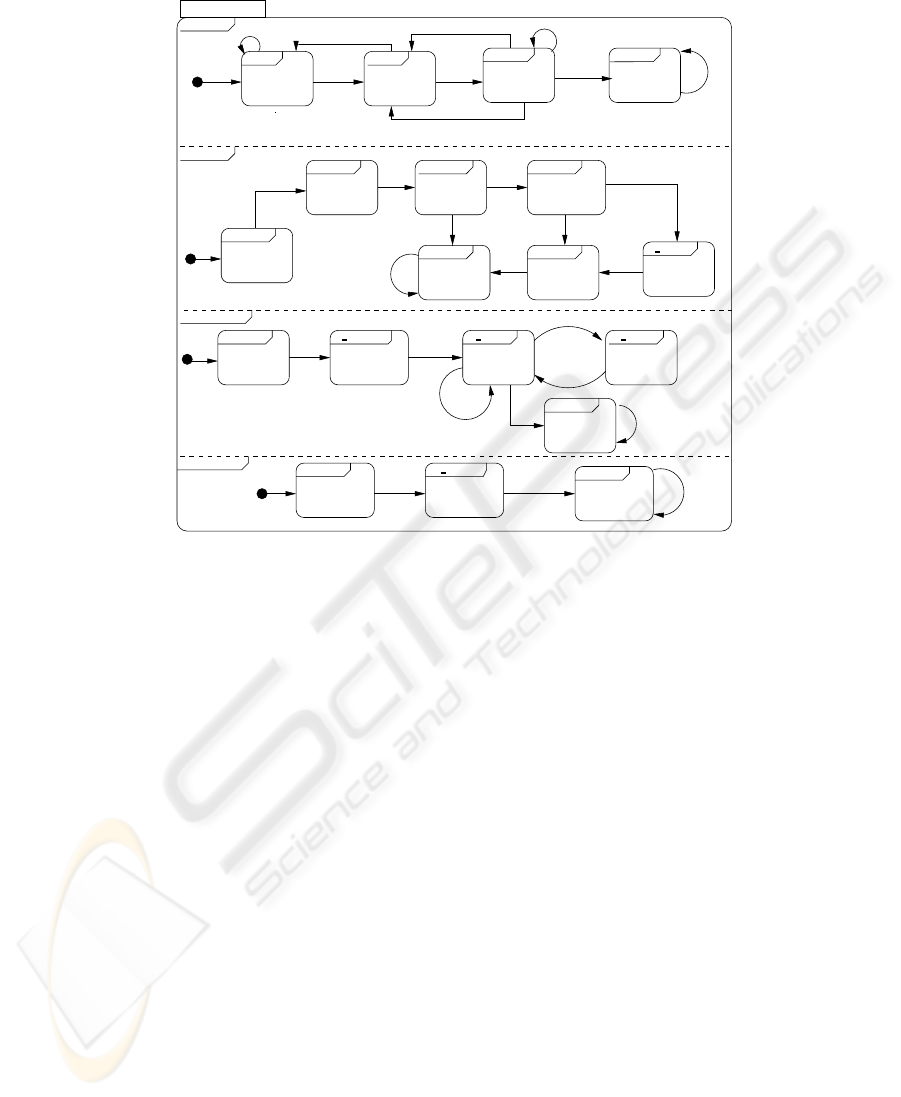
Fig.1. Specification of a logistic scenario as hybrid automata.
In Fig. 1, the specification of the previous multi-agent scenario is depicted as hybrid
automata - Due to the space limitation, the description of each automaton will not be
elaborated in details-. The multi-agent scenario constitutes four agents, Monitor, Truck,
Provider, and Disturbance. The agent Monitor, plugged into the truck, observes the oc-
currence of exceptional errors, as well as the putrefaction of the items. The items are
putrefied according to the exponential decay function, given as
˙
D = 1.2 ∗ D. When an
exceptional error occurs during the transportation, which is stimulated by the Distur-
bance agent after some time t
d
, the Monitor agent alarms the Truck with the occurrence
of this error. In turn, the Truck has to make an appropriate decision before the decayed
items reach a certain threshold
θ
. The decision is estimated, using the variable Ex
T
,
according to the remaining distance to the destination point. Here, Ex
T
is calculated
based on the dynamic of distance of the truck to the target. If the expected delivery
time is beyond a given critical time C
time
, then the Truck requests help from the trans-
portation service provider, who sends a rescue truck within two hours. However, if the
truck estimation is below the critical time C
time
, then it should continuously transport
the shipment according to the current conditions. At the end of transportation, both the
customer and the provider check the result of the previous plan.
The objective of the previous scenario is to check that the agents, particularly the
truck, will choose the right plan during the course of execution that utilize the profit of
its provider company.
69

3 Hybrid Automata
This section shows the basics extension to the syntax and semantics of hybrid automata.
A hybrid automaton is represented graphically as a state transition diagram dialect like
statecharts, augmented with mathematical formalisms on both transitions and locations.
Formally, a hybrid automaton/agent is defined as follows.
Definition 1 (components). A hybrid automaton is a tuple H =
(Var, Q, Inv, Flow, Init, E, Jump, Event,
ϒ
, Assgn) where:
– Var = R∪ A is a set of variables, where R ⊆ ℜ
n
is a finite set of n real-valued vari-
ables that model the continuous dynamics, whereas A is a set of auxiliary variables
that are used as a performance measure to make a decision. For example, the Truck
automaton has X ∈ R and Ex
T
∈ A.
– Q is a finite set of control locations. For example, the Disturbance automaton Fig. 1
has the locations init, no disturb,and disturb.
– Inv(q) is the invariant predicate, which assigns a constraint to the dynamic vari-
ables R ⊆ Var for each control location q ∈ Q. The control of a hybrid automaton
remains at a location q ∈ Q, as long as Inv(q) holds. For instance, the location
decay in the Monitor automaton has the invariant D ≤
θ
. Omitting the invariant at
some location indicates that the location is always achievable.
– Flow(q) is the flow predicate on the dynamic variables R ⊆ Var for each control
location q ∈ Q, which defines how the variables in R evolve over the time at location
q. It constrains the time derivative of the continuous part of the variablesat location
q. The flow of a variable X is denotedas
˙
X. For example,
˙
X = 50 describes the speed
of the automaton Truck at the location transport.
– Init is the initial condition that assigns an initial values to the variables R ∈ Var to
each control location q ∈ Q. For example, X = 0 is the initial condition of the Truck
automaton.
– E ⊆ Q× Q is the discrete transition relation over the control locations. Each edge
e = (q
1
, q
2
) ∈ E is augmented by the following annotations:
Jump: jump condition (guard), which is a constraint over Var that must hold upon
firing a transition e.
Event: synchronization label, used to synchronize concurrent automata. The syn-
chronization labels define how the automata are coordinated in terms of the
parallel composition.
Utility cost, which captures the preference of an agent over e. Formally, this is
done by introducing the function
ϒ
: E → ℜ. For example, at the location es-
timate, the Truck has preferences to go to either location w help or continue,
with utilities
µ
1
and
µ
2
respectively. The utility cost is omitted if there is no
preference on the edge e.
– Assgn is the updating function Assgn : R∪ A → ℜ, which resets the variables before
the control of a hybrid automaton goes from location q
1
to location q
2
. It is denoted
as v := Assgn(v). Here, we graphically distinguish between two types of updating
depending on types of variables v ∈ Var. Case v ∈ R (i.e. updating continuous vari-
ables), then the update is annotated graphically on the transitions e = (q
1
, q
2
). For
example, D := 1.2 is the updating of the continuous variable D between location
70

stable and decay in the automaton Monitor. Updating the variables on transitions
are omitted, if the value of the variables at end of location q
1
are the same at the
beginning of location q
2
. On the other hand, case v ∈ A (i.e. updating auxiliary
variables), then the update is annotated inside location q
1
. The reason behind this
is that these variables will be used afterward as decisions making on transitions.
For example, in the location estimate of the Truck automaton, EX
T
:= f (d
x
, ˙x) is
updating the auxiliary variable EX
T
to the estimated remaining time to deliver the
shipment to the target based on the current remaining distance to the target.
Semantically, both types of updates are the same. This is because both of them will
be eventually executed before the control goes immediately to location q
2
.
Informally speaking, the semantics of a hybrid automaton is defined in terms of a la-
beled transition system between states, where a state consists of the current location of
the automaton and the current valuation of the real variables. To formalize the seman-
tics of the hybrid automaton, we first need to define the concept of a hybrid automaton’s
state.
Definition 2 (State). At any instant of time, a state of a hybrid automaton is given by
σ
i
= hq
i
, v
i
,ti, where q
i
∈ Q is a control location, v
i
is the valuationof the real variables,
and t is the current time. A state
σ
i
= hq
i
, v
i
,ti is admissible if Inv(q
i
)[v
i
] holds.
A state transition system of a hybrid automaton H starts with the initial state
σ
0
=
hq
0
, v
0
, 0i, where the q
0
and v
0
are the initial location and valuations of the variables
respectively. For example, the initial state of the Truck (Fig. 1) can be specified as
hinit, 0, 0i.
Since we need to extend the agent decisions by means utilities, here we define the
term preference.
Definition 3 (Preference).Let q ∈ Q is a control location, whose preferences with con-
trol locations {q
1
, q
2
, .., q
n
} with respective utilities {
µ
1
,
µ
2
, ..,
µ
n
}. We call q
i
is the best
preference location to q if
µ
i
= Max{
µ
1
,
µ
2
, ..,
µ
n
}
Intuitively, an execution of a hybrid automaton corresponds to a sequence of transitions
from one state to another. In fact, a hybrid automatonevolvesdepending on two kinds of
transitions: continuous transitions, capturing the continuous evolution of states, and dis-
crete transitions, capturing the decision making to change into another location. More
formally, we can define hybrid automaton operational semantics as follows.
Definition 4 (Operational Semantic). A transition rule between two admissible states
σ
1
= hq
1
, v
1
,t
1
i and
σ
2
= hq
2
, v
2
,t
2
i is defined as follows:
discretely: iff t
1
= t
2
and Jump(v
1
) holds, then variables are reset at location q
2
such
that, Inv(q
2
)[v
2
] holds. Additionally, q
2
is the best preference of q
1
. In this case an
event a ∈ Event may be fired.
continuously(time delay): iff q
1
= q
2
, and (t
2
− t
1
> 0) is the duration of time passed
at location q
1
, during which the invariant predicate Inv(q1) continuously holds,
v
1
, v
2
are the variable valuations according to the flow predicate Flow(q1).
71

In principle, an execution of a hybrid automaton corresponds to a sequence of transi-
tions from one state to another, therefore we define the valid run as follows.
Definition 5 (Run). A run of hybrid automaton
∑
=
σ
0
σ
1
σ
2
.., is a finite or infinite
sequence of admissible states, where
σ
0
is the initial state.
In a run
∑
, the transition from a state
σ
i
to a state
σ
i+1
is related by either a discrete or
a continuous transition, according to Def. 4.
It should be noted that the continuous change in the run may generate an infinite
number of reachable states. It follows that state-space exploration techniques require a
symbolic representation system for the sets of states that have to be manipulated (this
is implemented efficiently using our CLP model [14] by means of mathematical finite
interval). We call the symbolic interval a region. Consequently, the set of all reachable
states at location q ∈ Q can be represented as hq,V, Timei, where V and Time repre-
sent the reachable region and time at location q respectively. Now, the run of hybrid
automata can be re-stated as a form of reachable regions, where the change from one
region to another one is fired using a discrete step.
The operational semantics is the basis for verification of hybrid automata. In partic-
ular, model checking of a hybrid automaton is defined in terms of reachability analysis
of the hybrid automaton.
Definition 6 (Reachability). A state
σ
j
is reachable from a state
σ
i
, if there is a se-
quence of admissible states starting from
σ
i
and ending in
σ
j
. A state
σ
j
is called
reachable if it can be reached from the initial state
σ
0
.
To model multi-agents system, one needs to coordinate the behaviors of the agents. For
this reason, hybrid automata can beextendedby parallel composition. Basically, parallel
composition of hybrid automata can be used for specifying larger systems (multi-agent
systems), where a hybrid automaton is given for each part of the system, and communi-
cation between the different parts may occur via shared variables and synchronization
labels. Technically, the parallel composition of hybrid automatais obtainedfrom the dif-
ferent parts using a product construction of the participating automata. The transitions
from the different automata are interleaved, unless they share the same synchronization
label. In this case, they are synchronized during the execution.As a result of the parallel
composition, an automaton is created, which captures the behavior of the entire system.
4 CLP Model
This section shows briefly how to encode the hybrid automata described in the previous
section using our CLP model [14]. The key advantage of our implementation model in
contrast to the other hybrid automata verification tools is that we do not need to con-
struct the composition of hybrid automata prior to verification phase. Instead, we con-
struct the behaviors dynamically during the computation. This relieves the state space
problem that may occur when modeling multi-agent systems. The prototype was built
using ECLiPSe Prolog [11]. Due to the space limitation, we will omit some details, but
we will show the basic outline of the CLP model.
An automaton is defined by a predicate ranging over the respective locations of the
automaton, real-valued variables, and the time:
72

automaton(Location,Vars,Vars0,T0,Time):-
c(Inv),c(Vars,Vars0,T0,Time).
Here, automaton is the name of the automaton itself, and Location represents is the
current location of the automaton. Vars is a list of real variables participating in the
automata, whereas Vars0 is a list of the correspondent initial values. c(Invs) is the
constraint that represents the invariant of the location, and the constraint predicate
c(Vars,Vars0, T0, Time) represents the continuous flows of the variable Vars wrt. time
{T0, Time} , where T0 is the initial time at the start of the continuous flow. The opera-
tional semantics are encode into CLP
evolve
predicate as follows.
evolve(Automaton,(L1,Var1),(L2,Var2),T0,Time,Event) :-
continuous(Automaton,(L1,Var1),(L1,Var2),T0,Time,Event);
discrete(Automaton,(L1,Var1),(L2,Var2),T0,Time,Event).
the
evolve
alternates between
continuous
and
discrete
based on the constraints that
appear during the run, as well as the Event that may occur.
Now, after the automata have been specified, a driver program is needed to coor-
dinate and execute the behaviors of the automata. For this reason, driver predicate is
implemented to do these missions. The last argument of the driver represents symboli-
cally the list of reachable regions.
driver((L1,Var01),(L2,Var02),...,(Ln,Var0n),T0,
[(L1,L2,..,Ln,Var1,Var2,..,Varn,Time,Event)|NextRegion]) :-
automaton1(L1,Var1,Var01,T0,Time1),
automaton2(L2,Var2,Var02,T0,Time2),
... ,
automatonn(Ln,Varn,Var0n,T0,Timen),
Time1 $=Time2, Time1 $=Time3, ..., Time1 $=Timen,
evolve(automaton1,(L1,Var01),(NextL1,Nvar01),T0,Time1,Event),
evolve(automaton2,(L2,Var02),(NextL2,Nvar02),T0,Time1,Event),
... ,
evolve(automatonn,(Ln,Var0n),(NextLn,Nvar0n),T0,Time1,Event),
driver((NextL1,Nvar01),(NextL2,Nvar02),...,(NextLn,Nvar0n),Time1,NextRegion).
To run the program, the driver has to be invoked with a query starting from the initial
states of the hybrid automata. An example, showing how to query the driver on logistic
multi-agent scenario, takes the form:
driver((init1,0),(init2,0),(init3,0),(init4,0),0,Reached).
5 Planning as Reachability Analysis
Now we have an executable constraint based specification, which can be used to ver-
ify several properties of our multi-agent team by means of a reachability analysis. Let
Reached represents the set of reached regions, then in terms of CLP, the reachability
analysis can be generally specified by checking whether
Reached
|=
Ψ
holds, where
Ψ
is the constraint predicate that describes a property of interest.
73

In the context of planning, the reachability question is equivalent to a plan existence.
For example, one can check that there is no bad plan, where the shipment is arrived to
its destination unsafely (i.e. the ratio of decayed items is below 20%). This can be in-
vestigated by showing that the location unsafe in the Monitor agent will not be reached.
Using the CLP computational model and with the help of the standard Prolog predicate
member/2, gives us the answer no as expected, after executing the following query:
?- drive((init1,0),(init2,0),(init3,0),(init4,0),0,Reached),
member((Monitor,_truck,_cargo,_disturbance,D,_x,_z,_y,Time,Event),
Reached),
Monitor = unsafe .
We are interested not only to find a plan, but also to find the plan that utilizes certain
tasks in case of happening an exceptional error. In the supply chain example, one can
check that the truck will choose the best plan that utilizes its company business and in
the same time fulfill the customer demands. This can be accomplished by investigating
the reachability of the shipment to its destination point with a certain precentage of
putrefaction D. For this purpose, the following query should be invoked.
?- drive((init1,0),(init2,0),(init3,0),(init4,0),0,Reached),
member((_monitor,Truck,_cargo,_disturbance,D,X,Z,Y,Time,Event),
Reached),
Truck = arrived.
However, there are several constraints, which influence the outcome of this query, such
as the time of the unexpected error generated by the Disturbance agent and the remain-
ing distance to the destination during the transportation. For example, setting the distur-
bance time t
d
= 8 in the supply chain model, the previous query gives the D ≃ 1.626%
upon the truck’s arrival to the destination, whereas setting t
d
= 24, the query gives
D ≃ 5.542%. In both cases, the customer’s demand is not violated according to the deal
with the provider. However, the contrast between the two values of D results from the
truck’s decision based on the constraintsappeared in the environment. In the first case of
t
d
, the truck requested a rescue from the provider. However in the second case, the truck
remains transporting the shipment without requesting a help. The previous analysis can
be checked using the following query:
?- drive((init1,0),(init2,0),(init3,0),(init4,0),0,Reached),
member((_monitor,_truck,_cargo,_disturbance,D,X,Z,Y,Time,Event),
Reached),
Event = rescue.
This query checks the reachability of a state where an event rescue is reached. In other
words, the query means does the truck need a rescue?. In the first case of t
d
, the query
returns with answer Yes, but it returns No in the second case.
6 Conclusions
Planning in dynamic environments is an essential task. Especially, when an exception
occurs during the planning. For this purpose, this paper showed how to extend the de-
74

cision making of hybrid automata on the base of performance functions for the unex-
pected events that occur during planning in dynamic environments. The extension was
illustrated by a scenario taken from supply chain management. Our CLP implementa-
tion model, helped us to achieve this extension flexibly.
As a future work, we intend to experiment and relate our work to the other works of
multi-agent planning in dynamic environments, where the time is critical.
References
1. R. Alur and D. Dill. A Theory of Timed Automata. Theoretical Computer Science,
126(2):183–235, 1994.
2. M. de Weerdt, A. ter Mors, and C. Witteveen. Multi-agent planning: An introduction to
planning and coordination. Handouts of the European Agent Summer School, pages 1–32,
2005.
3. M. desJardins, E. Durfee, C. Ortiz Jr, and M. Wolverton. Survey of research in distributed,
continual planning. AI MAG, 20(4):13–22, 1999.
4. M. Egerstedt. Behavior Based Robotics Using Hybrid Automata. Lecture Notes in Computer
Science, pages 103–116, 2000.
5. A. El Fallah-Seghrouchni, I. Degirmenciyan-Cartault, and F. Marc. Framework for Multi-
agent Planning Based on Hybrid Automata. Lecture Notes in Computer Science, pages 226–
235, 2003.
6. J. Ferber and A. Drogoul. Using reactive multi-agent systems in simulation and problem
solving. Kluwer Computer And Information Science Series, pages 53–80, 1992.
7. G. Frehse. PHAVer: Algorithmic verification of hybrid systems past HyTech. In M. Morari
and L. Thiele, editors, Hybrid Systems: Computation and Control, 8th International Work-
shop, Proceedings, LNCS 3414, pages 258–273. Springer, 2005.
8. T. Henzinger. The theory of hybrid automata. In Proceedings of the 11th Annual Symposium
on Logic in Computer Science, pages 278–292, New Brunswick, NJ, 1996. IEEE Computer
Society Press.
9. T. Henzinger, P. Ho, and H. Wong-Toi. HYTECH: a model checker for hybrid systems. In-
ternational Journal on Software Tools for Technology Transfer (STTT), 1(1):110–122, 1997.
10. G. Hutzler, H. Klaudel, and D. Y. Wang. Towards timed automata and multi-agent systems.
In Formal Approaches to Agent-Based Systems, Third InternationalWorkshop, FAABS 2004,
Greenbelt, MD, USA, April 26-27, 2004, Revised Selected Papers, volume 3228 of Lecture
Notes in Computer Science, pages 161–172. Springer, 2005.
11. M. W. Krzysztof R. Apt. Constraint Logic Programming Using Eclipse. Cambridge Univer-
sity Press, Cambridge, UK, 2007.
12. K. Larsen, P. Pettersson, and W. Yi. Uppaal in a nutshell. International Journal on Software
Tools for Technology Transfer (STTT), 1(1):134–152, 1997.
13. A. Mohammed and U. Furbach. Modeling multi-agent logistic process system using hybrid
automata. In U. Ultes-Nitsche, D. Moldt, and J. C. Augusto, editors, Proceedings of the 6th
International Workshop on Modelling, Simulation, Verification and Validation of Enterprise
Information Systems, MSVVEIS, pages 141–149. INSTICC PRESS, 2008.
14. A. Mohammed and F. Stolzenburg. Implementing hierarchical hybrid automata using con-
straint logic programming. In S. Schwarz, editor, Proceedings of 22nd Workshop on (Con-
straint) Logic Programming, pages 60–71, Dresden, 2008. University Halle Wittenberg, In-
stitute of Computer Science. Technical Report 2008/08.
75
