
APPEARANCE-BASED DENSE MAPS CREATION
Comparison of Compression Techniques with Panoramic Images
Luis Payá, Lorenzo Fernández, Óscar Reinoso, Arturo Gil and David Úbeda
Departamento de Ingeniería de Sistemas Industriales, Miguel Hernández University
Avda. de la Universidad s/n. 03202, Elche (Alicante), Spain
Keywords: Robot Mapping, Appearance-based Methods, Omnidirectional Vision, Spatial Localization.
Abstract: The visual information captured by omnidirectional systems is very rich and it may be very useful for a
robot to create a map of an environment. This map could be composed of several panoramic images taken
from different points of view in the environment, and some geometric relationships between them. To carry
out any task, the robot must be able to calculate its position and orientation in the environment, comparing
his current visual information with the data stored in the map. In this paper we study and compare some
approaches to build the map, using appearance-based methods. The most important factor of these
approaches is the kind of information to store in order to minimize the computational cost of the operations.
We have carried out an exhaustive experimentation to study the amount of memory each technique requires
to build the map, and the time consumption to create it and to carry out the localization process inside it.
Also, we have tested the accuracy to compute the position and the orientation of a robot in the environment.
1 INTRODUCTION
When a robot or a team of robots have to carry out a
task in an environment, an internal representation of
it is usually needed so that the robot can estimate its
initial position and orientation and navigate to the
target points. Omnidirectional visual systems are a
widespread sensor used with this aim due to their
low cost and the richness of information they
provide. Extensive work has been carried out in this
field, using the extraction of some natural or
artificial landmarks from the images to build the
map and carry out the localization of the robot
(Thrun, 2003). However, these processes can be
carried out just working with the images as a whole,
without extracting landmarks nor salient regions.
These appearance-based approaches are useful
when working in unstructured environments where it
may be hard to create appropriate models for
recognition, and offer a systematic and intuitive way
to build the map. Nevertheless, as we do not extract
any relevant information from the images, an
important problem of such approaches is the high
computational cost they suppose.
Different researchers have shown how a
manifold representation of the environment using
some compression techniques can be used. A widely
extended method is PCA (Principal Components
Analysis), as (Kröse, 2004) does to create a database
using a set of views with a probabilistic approach for
the localization inside this database. Conventional
PCA methods do not take profit of the amount of
information that omnidirectional cameras offer,
because they cannot deal with rotations in the plane
where the robot moves. (Uenohara, 1998) studied
this problem with a set of rotated images, and
(Jogan, 2000) applied these concepts to an
appearance-based map of an environment. The
approach consists in creating an eigenspace that
takes into account the possible rotations of each
training image, trying to keep a good relationship
between amount of memory, time and precision of
the map. Other works rely on Fourier Transform to
compress the information, as (Menegatti, 2004), that
defines the concept of Fourier Signature and
presents a method to build the map and localize the
robot inside it, or (Rossi, 2008), that uses spherical
Fourier transform of the omnidirectional images.
The representation of an environment with
appearance-based approaches can be separated in a
low-level map, that represents a room with several
images and a high-level map, which tries to
modelize the spatial relationships between rooms
and between rooms and corridors. (Booij, 2007)
250
Payá L., Fernández L., Reinoso Ó., Gil A. and Úbeda D. (2009).
APPEARANCE-BASED DENSE MAPS CREATION - Comparison of Compression Techniques with Panoramic Images.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 250-255
DOI: 10.5220/0002210502500255
Copyright
c
SciTePress

shows how these concepts can be implemented
through a graph representation whose nodes are the
images and whose links denote similarity between
them and (Vasudevan, 2007) uses a hierarchy of
cognitive maps where place cells represent the
scenes through a PCA compression and the
information provided by a compass is used to
compute the connectedness between them.
Appearance-based techniques constitute a basis
framework to other robotics applications, as in
route-following, as (Payá, 2008) shows.
2 REVIEW OF COMPRESSION
TECHNIQUES USING
OMNIDIRECTIONAL IMAGES
In this section, we outline some techniques to extract
the most relevant information from a set of
panoramic images, captured from several positions
in the environment to map.
2.1 PCA-based Techniques
When we have a set of N images with M pixels each,
N
j
x
M
xj
K
r
1;
1
=ℜ∈
, each image can be transformed
in a feature vector (also named ‘projection’ of the
image)
N
j
p
K
xj
r
;
1
ℜ∈ K1=
, being K the PCA
features containing the most relevant information of
the image,
N
K
≤
(Kirby, 2000). The PCA
transformation can be computed from SVD of the
covariance matrix C of the data matrix, X that
contains all the training images arranged in columns
(with the mean subtracted). If V is the matrix
containing the K principal eigenvectors and P is the
reduced data of size K x N, the dimensionality
reduction is done by , where the columns
of P are the projections of the training images,
.
XVP
T
·=
j
p
r
However, the database built in this way contains
information only for the orientation the robot had
when capturing each image but not for all the
possible orientations on each point. (Jogan, 2000)
presents a methodology to include this orientation
information but acquiring just one image per
position. When we work with panoramic images, we
can artificially rotate them by just shifting the rows.
This way, from every image
N
j
x
M
xj
K
r
1;
1
=ℜ∈
MxQ
ℜ
we
can build a submatrix where the first
column is the original image, and the rest of them
are the shifted versions of the original one, with a
j
∈X
Q
π
2
rotation between them.
When having a set of N training images, the data
matrix is composed of N blocks, and the covariance
matrix has the following form:
[
]
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
==⇒
=
NNNN
N
N
T
N
XXX
XXX
XXX
XXC
K
MOMM
K
K
K
21
22221
11211
21
XXXX
(1)
Where are circulant blocks. The
eigenvectors of a general circulant matrix are the Q
basis vectors from the Fourier matrix (Ueonara,
1998):
QxQik
ℜ∈X
()
[
]
T
iQii
i
12
1
−
=
γγγω
K
r
1,,,,0
2
−===
−
jeQi
Qj
π
γ
K
(2)
This property allows us to compute the
eigenvectors without necessity of performing the
SVD decomposition of C (this would be a
computationally very expensive process). This
problem can be solved by carrying out Q
decompositions of order N. The eigenvectors of C
shall be found among vectors of the form:
[
]
Niv
T
T
i
N
i
T
ii
T
iii
,,0,,,,
21
K
r
K
r
r
r
==
ωαωαωα
(3)
where
[
]
Ni
T
N
iiii
,,0,,,,
21
KK
r
==
αααα
are the
eigenvectors of the following matrix:
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=Λ
NN
i
N
i
N
i
N
iii
N
iii
λλλ
λλλ
λλλ
K
MOMM
K
K
21
22221
11211
(4)
where is an eigenvalue of
jk
i
λ
jk
X
corresponding to
the eigenvector
i
ω
r
. As the matrix has N
eigenvectors, if we repeat this process for every
Λ
i
ω
r
we can obtain Q·N linearly independent eigenvectors
of C.
2.2 Fourier-based Techniques
2.2.1 2D Discrete Fourier Transform
When we have an image f(x,y) with N
y
rows and N
x
columns, the 2D discrete Fourier Transform is
defined through:
APPEARANCE-BASED DENSE MAPS CREATION - Comparison of Compression Techniques with Panoramic Images
251

()
[]
()
()
1,,0,1,,0
,
1
,,
1
0
1
0
2
−=−=
⋅=
==ℑ
∑∑
−
=
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+−
yx
N
x
N
y
N
vy
N
ux
j
y
NvNu
eyxf
N
vuFyxf
x
y
yx
KK
π
(5)
The components of the transformed image are
complex numbers so it can be split in two matrices,
one with the modules (power spectrum) and other
with the angles. The most relevant information in the
Fourier domain concentrates in the low frequency
components. Furthermore, removing high frequency
information can lead to an improvement in
localization because these components are more
affected by noise. Another interesting property when
we work with panoramic images is the rotational
invariance, which is reflected in the shift theorem:
()
[]
()
1,,0,1,,0
,,
00
2
00
−=−=
⋅=−−ℑ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+⋅−
yx
N
vy
N
ux
j
NvNu
evuFyyxxf
yx
KK
π
(6)
According to this property, the power spectrum
of the rotated image remains the same of the original
image and only a change in the phase of the
components of the transformed image is produced,
whose value depends on the shift on the x-axis (x
0
)
and the y-axis (y
0
). It means that when two images
are acquired from close points of the environment
but with different headings for the robot, then, the
power spectrum is very similar, and studying the
difference in phases we could estimate the angle
between the two orientations, using eq. (6).
2.2.2 Fourier Signature of the Image
If we work with panoramic images, we can use
another Fourier-based compact representation that
takes profit of the shift theorem applied to
panoramic images (Menegatti, 2004). It consists in
expanding each row of the panoramic image
{
}
{
}
110
,,,
−
=
y
Nn
aaaa K
using the Discrete Fourier
Transform into the sequence of complex numbers
{
}
{
}
110
,,,
−
=
y
Nn
A
A
A
A
K
.
This Fourier Signature presents the same
properties as the 2D Fourier Transform. The most
relevant information concentrates in the low
frequency components of each row, and it presents
rotational invariance. However, it exploits better this
invariance to ground-plane rotations in panoramic
images. These rotations lead to two panoramic
images which are the same but shifted along the
horizontal axis (fig. 1). Each row of the first image
can be represented with the sequence
{
and each
row of the second image will be the sequence
}
n
a
{
}
qn
a
−
,
being q the amount of shift, that is proportional to
the relative rotation between images. The rotational
invariance is deducted from the shift theorem, which
can be expressed as:
{}
[]
1...,,0;
2
−==ℑ
⋅−
− y
N
qk
j
kqn
NkeAa
y
π
(7)
where
{
}
[
]
qn
a
−
ℑ
is the Fourier Transform of the
shifted sequence, and are the components of the
Fourier Transform of the non-shifted sequence.
According to this expression, the amplitude of the
Fourier Transform of the shifted image is the same
as the original transform and there is only a phase
change, proportional to the amount of shift q.
k
A
Figure 1: A robot rotation on the ground plane produces a
shift in the panoramic image captured.
3 MAP BUILDING
To carry out the experiments, we have captured a set
of omnidirectional images on a pre-defined 40x40
cm grid in an indoor environment, including an
unstructured room (a laboratory) and a structured
one (a corridor). We work with panoramic images
with size 56x256 pixels. Once we have all the
panoramic images, we have used the compression
methods exposed in the previous section. Fig. 2(a)
shows a bird’s eye view of the grid used to take the
images and two examples of panoramic images.
Before using the compression methods, a
normalisation and a filtering process have been
carried out to make the map robust to changes in
illumination. There have been significant differences
when using each one of the compression methods,
regarding the elapsed time and the amount of
memory the map takes up once it is built.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
252
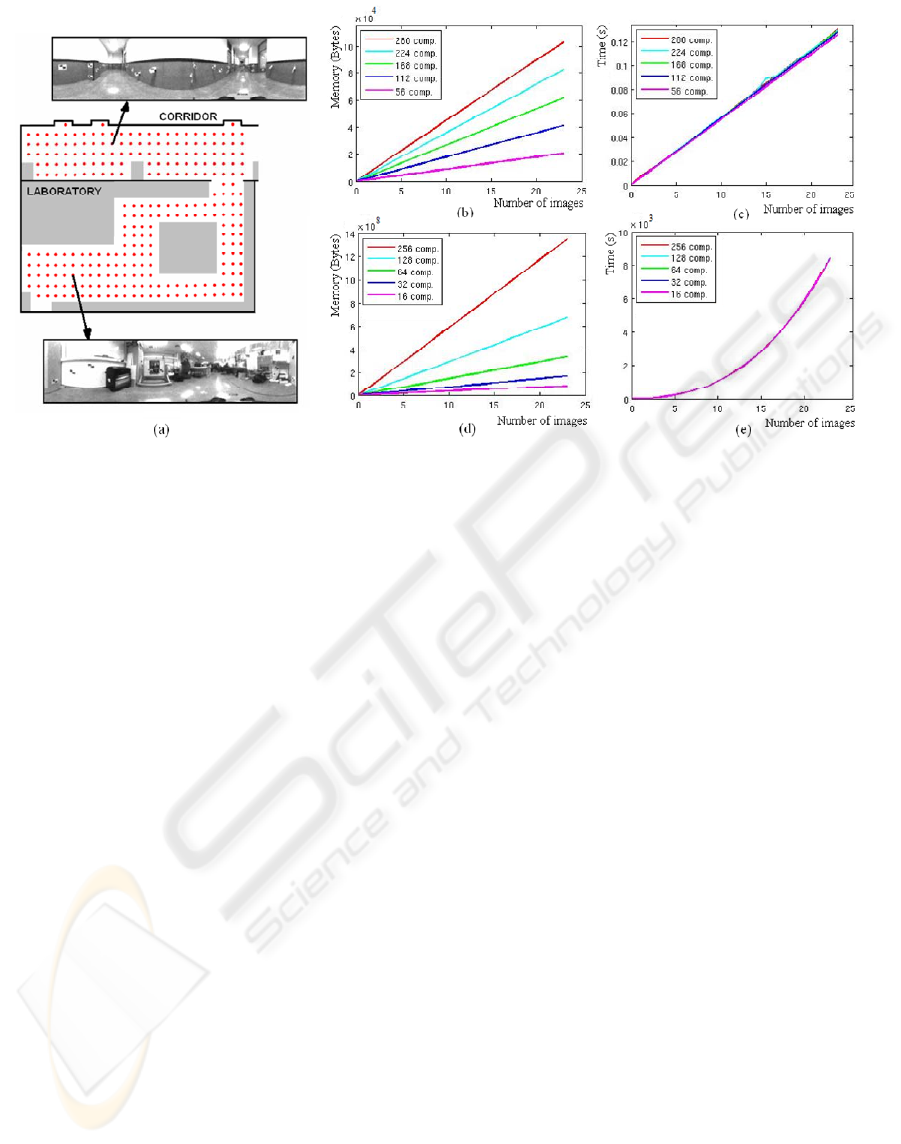
Figure 2: (a) Grid used to capture the training set of images, (b) amount of memory taken up and (c) time elapsed to build
the map with the Fourier-based approaches, (d) amount of memory and (e) time elapsed with the PCA-based approach.
Fig. 2(b) shows the amount of memory the map
constructed takes up, depending on the number of
images in the map, and the number of Fourier
Components we retain (those of lower frequency).
When we work with the Fourier Signature, taking
224 components implies we retain 4 Fourier
Components per row (56 rows in the image). In the
case of 2D Fourier transform, 224 components
means we take the firs 7 rows and 32 columns
(where the main information is concentrated).
Fig. 2(c) shows the elapsed time to build the
database, depending on the number of images in the
map and the number of Fourier components we
retain. The time elapsed is very similar when we use
the Fourier Signature and the 2D Fourier Transform.
On the other hand, fig. 2(d) and 2(e) show the results
when using the PCA compression technique for
spinning images. Fig 2(d) shows the amount of
memory required. The PCA map is composed of the
matrix
K
xM
CV ∈
, which contains the K main
eigenvectors and the projections of the training
images
N
j
C
p
K
x
j
r
;
1
∈ K1=
.
Although the training images have been
artificially rotated to add the orientation information
in the database, it is not necessary to store the
projections of all the rotated images but only the
projections of one image per training position. This
is due to the fact that a rotation in the image results
in the change of angle of the PCA coefficients of
this image, but not in the module. So, if we have the
coefficients for one representative viewpoint, the
coefficients of the rotated images can automatically
be generated through a rotation in the complex
plane. So the module of the projections can be used
to compute the position of the robot, and the phase is
useful to know the orientation. Anyway, as we can
see on fig. 2, PCA is a computationally more
expensive process comparing to Fourier Transform.
4 LOCALIZATION AND
ORIENTATION RECOVERING
To test the validity of the previous maps, the robot
has captured several test images in some half-way
points among those stored in the map. We have
captured two sets of test images, the first one, at the
same time we took the training set and the second
one a few days later, in different times of the day
(with varying illumination conditions) and with
changes in the position of some objects. The
objective is to compute the position and orientation
of the robot when it took the test images, just using
the visual information in the maps.
4.1 PCA-based Techniques
The PCA map is made up of the matrix
K
xM
CV
∈
,
which contains the K main eigenvectors and the
projections of the training images
1
K
xj
C
p
∈
r
(one per
position, as explained in the previous section), that
APPEARANCE-BASED DENSE MAPS CREATION - Comparison of Compression Techniques with Panoramic Images
253

have been decomposed in two vectors,
1
K
xj
m
R
p
∈
r
containing the modules of the components of the
projections and
1
K
xj
ph
R
p
∈
r
containing the phases.
To compute the location where the robot took
each test image, we have to project the test image
onto the eigenspace,
1Mxi
Rx ∈
r
1
·
Kxi
Cx ∈
Ti
Vp =
r
r
.
Then, we compute the vector of modules
1Kxi
m
Rp ∈
r
and compare it with all the vectors
j
m
p
r
stored in the
map. The criterion used is the Euclidean distance.
The corresponding position of the robot is extracted
as the best matching. Once this position is known,
we make use of the phases vector
i
ph
p
r
to compute
the orientation of the robot.
Table 1 shows the results we have obtained
when computing the position and the orientation
when the training set is taken over a 30x30 cm grid
and table 2 shows the same results for an 40x40 cm
grid, depending on the number of eigenvectors (K)
we retain. In these tables, p
1
is the probability that
the best match is the actually nearest image
(geometrically), p
2
is the probability that the best
match is one of the two actually nearest images, and
p
3
is the probability it is one of the three nearest
images. At last, e
θ
is the average error in the
orientation estimation.
Table 1: Accuracy in the estimation of the position and
orientation with PCA methods. 30x30 cm grid training set.
K
p
1
p
2
p
3
e
θ
112
81.8 96.7 97.1 3.21º
224
82.6 96.8 98.8 2.89º
448
87.2 96.8 98.8 5.29º
Table 2: Accuracy in the estimation of the position and
orientation with PCA methods. 40x40 cm grid training set.
K
p
1
p
2
p
3
e
θ
112
96.3 97.1 98.4 8.07º
224
96.7 97.5 99.3 5.95º
448
97.9 98.8 99.5 4.79º
Fig. 3(a) shows the time taken up by this method
to compute the position and orientation, depending
of the number of images stored in the map, and the
number of eigenvectors.
4.2 Fourier-based Techniques
To compute the position and orientation of the robot
for each test image, we compute the Fourier
Transform (with the two methods described in the
previous section) and then, we compute the
Euclidean distance of the power spectrum of the test
image with the spectra stored in the map. The best
match is taken as the current position of the robot.
On the other hand, the orientation is computed
with eq. (6), when we work with 2D Discrete
Fourier Transform (assuming y
0
= 0) and with the
expression (7), when we work with the Fourier
Signature. We obtain a different angle per row so we
have to compute the average angle. Tables 3 and 4
show the accuracy we obtain in position and
orientation estimation with the Fourier methods.
Table 3: Accuracy in the estimation of the position and
orientation. Fourier methods. 30x30 cm grid training set.
K
p
1
p
2
p
3
e
θ
2x56
76.5 94.6 96.3 3.13º
4x56
78.5 95.5 97.5 3.04º
8x56
83.9 97.4 98.4 2.91º
16x56
85.5 98.4 98.4 2.89º
Table 4: Accuracy in the estimation of the position and
orientation. Fourier methods. 40x40 cm grid training set.
K
p
1
p
2
p
3
e
θ
2x56
94.2 96.7 97.2 4.36
4x56
94.6 97.5 98.3 4.35
8x56
96.7 98.8 100 4.40
16x56
97.5 99.6 100 4.37
Fig. 3(b) shows the time elapsed since the robot
captures the omnidirectional image until the position
and orientation of the robot are obtained, depending
on the number of images stored in the map and the
number of Fourier components we retain. This
approach clearly outperforms the PCA methods in
accuracy and time consumption.
(a) (b)
Figure 3: Time consumption to compute position and
orientation with (a) PCA and (b) Fourier methods.
5 CONCLUSIONS
In this work, we have exposed the principles of the
creation of a dense map of a real environment, using
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
254

omnidirectional images and appearance-based
methods. We have presented three different methods
to compress the information in the map. The
mathematical properties of these methods together
with the rich information the omnidirectional images
pick up from the environment permit the robot to
compute its position and orientation into the map.
The Fourier Transform method (both the 2D
Discrete Fourier Transform and the Fourier
Signature) has proved to be a good method to
compress the information comparing to PCA
regarding both the time and the amount of memory,
and the accuracy in position and orientation
estimation. Another important property is that the
Fourier Transform is an inherently incremental
method. When we work with PCA, we need to have
all the training images available before carrying out
the compression so this method cannot be applied to
tasks that require an incremental process (e.g. a
SLAM algorithm where the information of the new
location must be added to the map while the robot is
moving around the environment). The Fourier
Transform does not present this disadvantage
because the compression of each image is carried
out independently. These properties make it
applicable to future tasks where the robots have to
add new information to the map and localize
themselves in real time.
This work opens the door to new applications of
the appearance-based methods in mobile robotics.
As we have shown, the main problem these methods
present is the high requirements of memory and
computation time to build the database and make the
necessary comparisons to compute the position and
orientation of the robot. Once we have studied in
deep some methods to compress the information and
separate the calculation of position and orientation,
the next step should be to test their robustness to
changes in illumination and in the position of some
objects in the scene. Also, their robustness and
simplicity make them applicable to the creation of
more sophisticated maps, where we have no
information of the position the robot had when he
took the training images.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish
government through the project DPI2007-61197.
‘Sistemas de percepción visual móvil y cooperativo
como soporte para la realización de tareas con redes
de robots’.
REFERENCES
Artac, M.; Jogan, M. & Leonardis, A., 2002. Mobile
Robot Localization Using an Incremental Eigenspace
Model, In Proceedings of IEEE International
Conference on Robotics and Automation, Washington,
USA, pp. 1205-1030, IEEE.
Booij, O., Terwijn, B., Zivkovic, Z., Kröse, B., 2007.
Navigation using an Appearance Based Topological
Map. In IEEE International Conference on Robotics
and Automation, pp. 3297-3932 IEEE Press, New
York.
Jogan, M., Leonardis, A., 2000. Robust Localization
Using Eigenspace of Spinning-Images. In Proc. IEEE
Workshop on Omnidirectional Vision, Hilton Head
Island, USA, pp. 37-44, IEEE.
Kirby, M., 2000. Geometric data analysis. An empirical
approach to dimensionality reduction and the study of
patterns, Wiley Interscience.
Kröse, B., Bunschoten, R., Hagen, S., Terwijn, B.
Vlassis, N., 2004. Household robots: Look and learn.
In IEEE Robotics & Automation magazine. Vol. 11,
No. 4, pp. 45-52.
Menegatti, E.; Maeda, T. Ishiguro, H., 2004. Image-based
memory for robot navigation using properties of
omnidirectional images. In Robotics and Autonomous
Systems. Vol. 47, No. 4, pp. 251-276.
Payá, L., Reinoso, O., Gil, A., Sogorb. J., 2008. Multi-
robot route following using omnidirectional vision and
appearance-based representation of the environment.
In Lecture Notes in Artificial Intelligence. Hybrid
Artificial Intelligence Systems, Vol. 5271, pp. 680-687
Springer.
Rossi, F., Ranganathan, A., Dellaert, F., Menegatti, E.,
2008. Toward topological localization with spherical
Fourier transform and uncalibrated camera. In Proc.
Int. Conf. on Simulation, Modeling and Programming
for Autonomous Robots. Venice (Italy), pp. 319-330.
Thrun, S., 2003. Robotic Mapping: A Survey, In
Exploring Artificial Intelligence in the New Milenium,
pp. 1-35, Morgan Kaufmann Publishers, San
Francisco, USA.
Ueonara, M., Kanade, T, 1998. Optimal approximation of
uniformly rotated images: relationship between
Karhunen-Loeve expansion and Discrete Cosine
Transform. In IEEE Transactions on Image
Processing. Vol. 7, No. 1, pp. 116-119.
Vasudevan, S., Gächter, S., Nguyen, V., Siegwart, R.,
2007. Cognitive maps for mobile robots – an object
based approach. In Robotics and Autonomous Systems.
Vol. 55, No. 1, pp. 359-371.
APPEARANCE-BASED DENSE MAPS CREATION - Comparison of Compression Techniques with Panoramic Images
255
