PERFORMANCES IMPROVEMENT AND STABILITY
ANALYSIS OF MULTIMODEL LQ CONTROLLED
VARIABLE-SPEED WIND TURBINES
Nadhira Khezami
1,2
, Xavier Guillaud
2
and Naceur Benhadj Braiek
1
1
LECAP, École Polytechnique de Tunisie, BP 743 – 2078 La Marsa, Tunisia
2
L2EP, École Centrale de Lille, Cité Scientifique, 59651 Villeneuve d’Ascq Cedex, France
Keywords: LQ controller, Multimodel approach, Global stability, LMI, Lyapunov equations.
Abstract: In this paper, a linear quadratic (LQ) control law combined with a multimodel approach is designed for
variable-speed, variable-pitch wind turbines. The presented technique is based on an optimal control method
in order to improve the system global dynamic. A set of linear local models (sub-models) is then defined for
different operating points corresponding to high wind speeds. Thereafter, a global asymptotic stability
analysis is developed by solving a bilinear matrix inequality (BMI) feasibility problem based on the local
stability of the sub-models.
1 INTRODUCTION
Nowadays, the growth of the utilization of the wind
turbines is more and more important since they are
producing carbon-emission-free electricity. Until
today, only classic control laws, such as P, PI or PID
controllers, are used in the wind turbines. However,
the performance of these controllers is limited by the
high nonlinear characteristics of the wind turbine
and by the appearance of new control objectives
required by the grid-codes; the reason why advanced
control research area is improving every day.
In the first axis of this paper, an LQ controller,
which had been advocated by many researchers, is
designed with a multimodel approach, for pitch
regulated variable speed wind turbines operating at
high wind speeds, in order to guarantee an optimal
behavior for the studied process. However, this
technique still presents some limits to satisfy all the
control objectives especially those concerning the
system global dynamic. This paper aims then to
present an issue for this problem by adding an
exponential term in the quadratic cost function.
The second section deals with the asymptotic
stability analysis of the global system by solving a
set of BMI according to the Lyapunov theorems. In
fact, the stability study is necessary and important to
illustrate the effectiveness of the presented strategy.
Finally, the simulation results realized on Matlab
Simulink are presented and discussed.
2 WIND TURBINE MODELLING
2.1 Wind Turbine Description
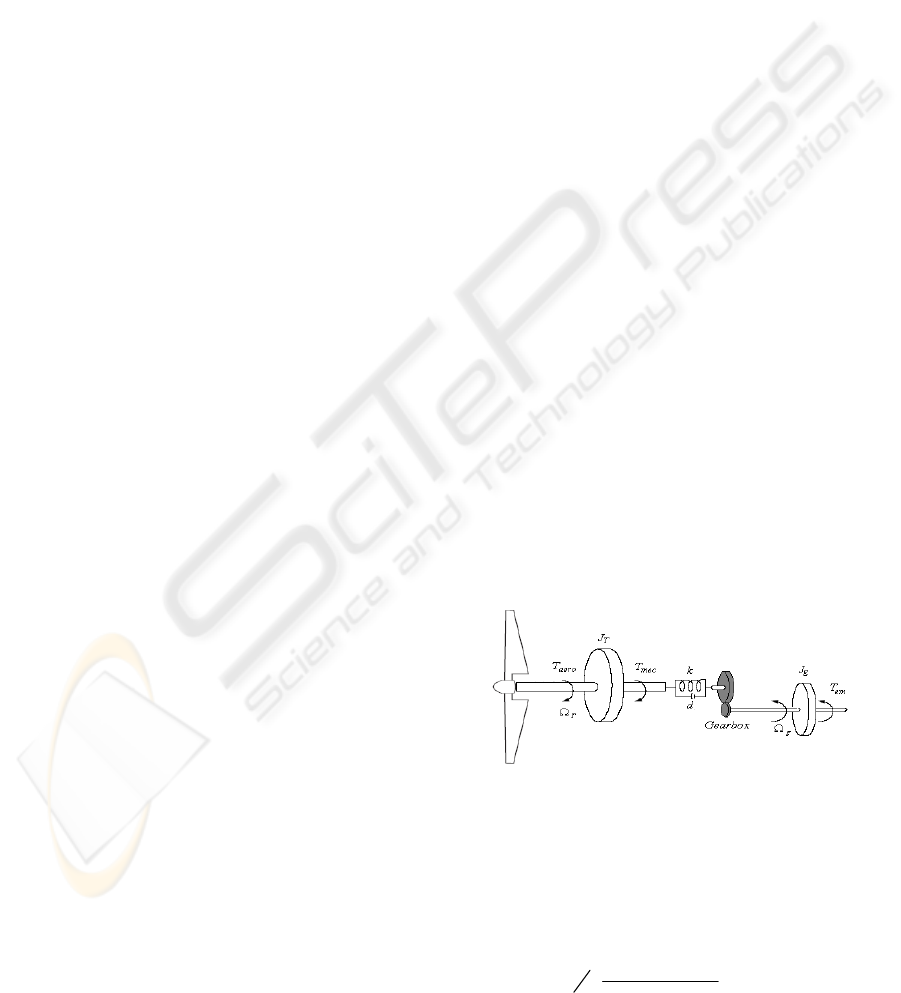
The considered wind turbine (Figure 1) is modeled
as two inertias (the generator and the turbine inertias
respectively J
g
and J
T
) linked to a flexible shaft with
a mechanical coupling damping coefficient d and a
mechanical coupling stiffness coefficient k. This
model is widely used in the literature (Bianchi et al.,
2004; Camblong et al., 2002).
Figure 1: Wind turbine dynamic model.
where Ω
T
and Ω
g
are the turbine and the generator
rotational speeds, T
em
is the generator torque, T
mec
is
the drive train mechanical torque and T
aero
is the
torque caught by the wind turbine which is
expressed by:
52
1
2
3
.(,)
T
aero p
R
Tc
ρπ
λβ
λ
⋅⋅ ⋅Ω
=⋅
(1)
81
Khezami N., Guillaud X. and Benhadj Braiek N. (2009).
PERFORMANCES IMPROVEMENT AND STABILITY ANALYSIS OF MULTIMODEL LQ CONTROLLED VARIABLE-SPEED WIND TURBINES.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 81-88
DOI: 10.5220/0002213100810088
Copyright
c
SciTePress

where ρ is the air density and R is the turbine radius.
The power coefficient c
p
(Figure 2) is a non
linear function of the blade pitch β and the tip speed
ratio λ depending on the wind speed value v and
given by:
T
R
v
λ
Ω⋅
=
(2)
Figure 2: Power coefficient curves.
The dynamic response of the rotor is given by:
.
TT aero mec
J
TTΩ= −
(3)
The generator is driven by the mechanical torque
and braked by the electromagnetic torque. Reported
to the low speed shaft, the characteristic equation is
the following:
..
g
ls g ls mec em
J
TGT
−−
Ω= −
(4)
where G is the gearbox gain and:
².
g
gls
gls g
G
J
GJ
−
−
Ω
−Ω =
−=
(5)
And the low speed shaft torque T
mec
results from
the torsion and friction effects due to the difference
between the generator and the rotor speeds
(Boukhezzara et al., 2007). It’s defined by the
following equation reported to the low speed shaft:
.( ) .( )
mec T gls T gls
Tk d
−−
= Ω −Ω + Ω −Ω
(6)
The pitch actuator dynamic is described by a first
order system:
1
()
ref
β
βββ
τ
=−
(7)
β
ref
represents the control value of the blade-pitch
angle β and τ
β
is the time constant of the pitch
actuator.
2.2 Linearization and State
Representation
The wind turbine is a complex non linear system
presenting several difficulties in study and control. It
seems then more suitable to describe it with a set of
linear local models valid in different operating
points corresponding to different levels of wind
speed values. The principle of this method is used in
several techniques. In this paper, we use the
multimodel approach which was the subject of many
research works (Kardous et al., 2006, 2007).
For the studied system, we define a multimodel
base made of four local models. The equivalent
instantaneous model, as described in Figure 3, is
obtained by a fusion of only two valid successive
models. The choice of these models depends on the
wind speed value.
Figure 3: Wind-turbine multimodel description.
The weighting coefficient µ
i
is the validity value
of the model M
i
and it can be expressed by:
1
ii
µ
r
=
−
(8)
r
i
is a normalized residue measuring the error
between the instantaneous and the valid local model
wind speed values (respectively v and v
i
). When M
i
and M
i+1
are the valid models, the residue can be
expressed as:
1
i
i
ii
vv
r
vv
+
−
=
+
(9)
Thus, the validities satisfy the convex sum, such
that:
1
1
ii
µµ
+
+
=
To obtain the local models, the system should be
then linearized around the operating point. The non-
linearity of the system is due to the c
p
characteristic
which is used in the expression of the aerodynamic
torque. We need then to linearize the expression (1)
M=µ
i
. M
i
+
µ
i+1
. M
i+1
Multimodel base
Equivalent model
Model M
1
Valid local models
Model M
2
Model
Model M
i
Model M
i+1
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
82

of T
aero
around an operating point (o.p) defined by
the wind speed value v
i
(Bianchi et al., 2007;
Munteanu et al., 2005). We can define:
.
.
..
..
aero aero
aero T
T
op
op
iTi
TT
T
ab
β
β
β
∂∂
Δ= ΔΩ+ Δ
∂Ω ∂
=ΔΩ+Δ
(10)
where:
_
2
3
__
3
2
_
(, )
1
... . .
2
(, )
1
... . .
2
inom
p
p
i
i
Tnom inom
p
i
i
T nom
c
c
v
aR
c
v
bR
λβ
ρπ
λλ
λβ
ρπ
β
⎡
⎤
∂
=−
⎢
⎥
Ω∂
⎢
⎥
⎣
⎦
∂
=
Ω∂
(11)
and:
()
_
__
__
3
,
2. .
..².
i nom
p p i nom i nom
T nom aero nom
i
cc
T
Rv
λβ
ρπ
=
Ω
=
(12)
The symbol Δ represents the deviation from the
chosen operating point corresponding to (Ω
T_nom
, Ω
g-
ls-nom
, β
i-nom
, T
mec-nom
, T
em-nom
and P
nom
) where: T
em-nom
and T
mec-nom
are respectively the nominal values of
the electromagnetic and the mechanical torques.
Thereafter, the linearization of the non-linear
system expressed in equations (3), (4), (6) and (7)
around an operating point gives a state space
representation of the form below:
{
..
..
ii
ii
x
Ax Bu
yCxDu
=+
=+
(13)
where x, u and y are respectively the state, control
and output vectors defined as:
,and
T
ref
gls
T
em
mec
xy u
P
T
T
β
β
−
ΔΩ
⎡⎤
Δ
⎢⎥
ΔΩ
⎡⎤
ΔΩ
⎡⎤
== =
⎢⎥
⎢⎥
⎢⎥
Δ
Δ
Δ
⎣⎦
⎣⎦
⎢⎥
Δ
⎣⎦
(14)
Notice that P=T
em
.Ω
g
designates the generated
electrical power. This leads to write around an
operating point:
()
__
.. .
em nom g ls em g ls nom
PGT T
−−
Δ= ΔΩ +Δ Ω
(15)
Hence, A
i
, B
i
, C
i
and D
i
, which are respectively
the state, input, output and feedthrough matrices, are
defined as follows:
_
_
1
0
1
000
1
00 0
..
11
.
00
0
1000
1
,
0
0. 00
.
0
00
and
0.
ii
TT T
gls
i
ii
TTTgls
gls
ii
em nom
gls
i
glsnom
ab
JJ J
J
A
ad db
kk d
JJJJ
G
J
BC
GT
dG
J
D
G
β
β
τ
τ
−
−
−
−
−
⎛⎞
−
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⎜⎟
=
⎜⎟
−
⎜⎟
⎜⎟
⎛⎞
⎜⎟
⎜⎟
+− −+
⎜⎟
⎜⎟
⎜⎟
⎝⎠
⎝⎠
⎛⎞
⎜⎟
−
⎜⎟
⎜⎟
⎛⎞
⎜⎟
==
⎜⎟
⎜⎟
⎝⎠
⎜⎟
⎜⎟
⎜⎟
⎝⎠
⎛⎞
=
⎜⎟
Ω
⎝⎠
(16)
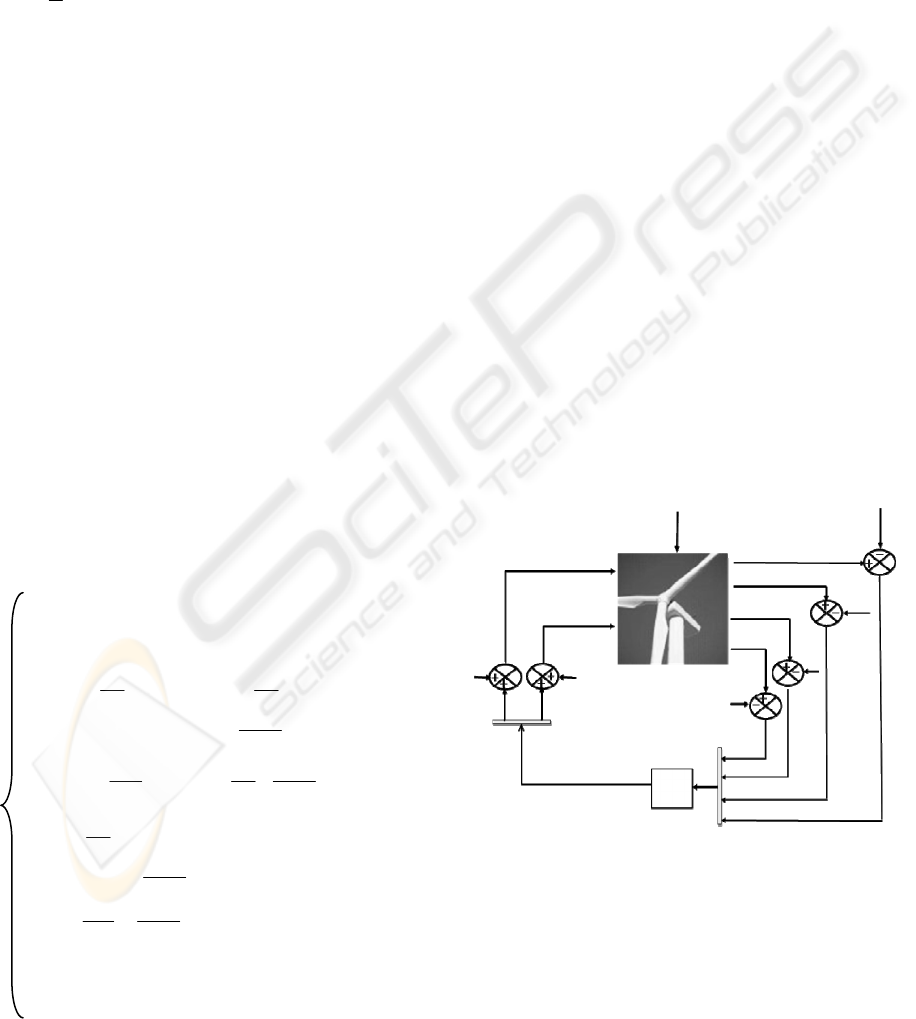
3 CONTROLLER DESIGN
The control task is based on the objective of
regulating the rotor rotational speed and the
generated power by acting on two control variables:
the electromagnetic torque T
em
and the regulating
pitch angle β
ref
.
β
ref
Pitch
actuator
Aerodynamic
s
y
ste
m
Electrical
s
y
ste m
β
Ω
T
P
el ec
wind
T
em
Figure 4: Wind turbine block diagram.
The LQ control strategy had been advocated by
many research works (Boukhezzara et al., 2007;
Khezami et al., 2009; Poulsen et al., 2005;
Hammerum et al., 2007; Cutululis et al., 2006). This
technique presents a good compromise between the
performances optimization and the minimization of
the control signals by the use of a quadratic cost
function. However, it also presents the disadvantage
of the non possibility of controlling the global
system dynamic. In this paper, a solution that can
partially solve this problem is presented.
This controller aims to minimize the following
quadratic criterion J :
()
2
0
1
.. .. .
2
TT t
J
yQy uRue dt
α
+∞
=+
∫
(17)
where Q and R are diagonal positive definite
matrices.
PERFORMANCES IMPROVEMENT AND STABILITY ANALYSIS OF MULTIMODEL LQ CONTROLLED
VARIABLE-SPEED WIND TURBINES
83
The term y
T
.Q.y expresses the performances
optimization, the term u
T
.R.u expresses the
minimization of the control signals and the term e
2αt
allows the performances improvement of the classic
quadratic criterion. It leads to the placement of the
system poles on the left of -α.
The criterion can be rewritten as follows with an
input-state cross term:
()
2
11
0
1
.. 2... ...
2
TTTt
J
xQx xNu uRue dt
α
+∞
=++
∫
(18)
where Q
1
, R
1
and N are defined as :
1
1
..
..
..
T
T
T
QCQC
RRDQD
NCQD
⎧
=
⎪
=+
⎨
⎪
=
⎩
(19)
For this criterion, the optimal gain can be
calculated from the following Riccati equation:
1
11 1
1
1
11
.. (. )..(. )
0
.
.( . )
TTT
iii i
ii
TT
ii
ALLA LBNRBLN
Q
AA I
KRBLN
αα
α
α
−
−
⎧
+−+ +
⎪
⎪
+=
⎨
=+
⎪
=+
⎪
⎩
(20)
where I is the identity matrix.
Since the dynamic of the pitch actuator should
not be changed, the controller is designed in two
steps. In the first step, we consider the blade pitch
angle β and the electromagnetic torque T
em
as control
variables instead of β
ref
and T
em
. The state
representation becomes then:
{
..
..
1i11i11
i1 1 i1 1
x
Ax Bu
yCx Du
=+
=+
(21)
where:
()
,and
.
.
,
.
.
.
and
T
T
1gls 1
em
mec
i
TT
i1
gls
i
TTgls
i
T
i1
gls
i
Tgls
i1
em nom
xyu
T
P
T
a
1
0
JJ
1
A00
J
ad
11
kkd
JJJ
b
0
J
G
B0
J
db
dG
JJ
100
C
0GT 0
β
−
−
−
−
−
−
⎡⎤
ΔΩ
ΔΩ
Δ
⎡⎤
⎡⎤
⎢⎥
=ΔΩ = =
Δ
Δ
⎢⎥
⎢⎥
⎣⎦
⎣⎦
⎢⎥
Δ
⎣⎦
⎛⎞
⎜⎟
−
⎜⎟
⎜⎟
⎜⎟
=
⎜⎟
⎜⎟
⎛⎞
⎜⎟
⎜⎟
+−−+
⎜⎟
⎜⎟
⎝⎠
⎝⎠
⎛⎞
⎜⎟
⎜⎟
⎜⎟
=−
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⎝⎠
=
()
i1
00
D
01
=
(22)
From this representation, the optimal gain
_
_
i1
i1
i1 Tem
K
K
K
β
⎡
⎤
=
⎢
⎥
⎢
⎥
⎣
⎦
is calculated such that:
.
1i11
em
uKx
T
β
Δ
⎡⎤
==−
⎢⎥
Δ
⎣⎦
(23)
The relation (23) leads to the following optimal
control law using the global state vector as shown in
Figure 5:
_
_
.
i
iref
i
iTem
uKx
K
K
K
β
=−
⎧
⎪
⎡
⎤
⎨
=
⎢
⎥
⎪
⎢
⎥
⎣
⎦
⎩
(24)
with:
(
)
_ 1_ 1_11 1_1_2
1_ 1_ 1_ 1
_1_1
... ...
.. . .
.
iref i i i i i
i i Tem i Tem
i Tem i Tem
KKKATKBT
KB K T
KKT
βββββββ
ββ
ττ
τ
⎧
=
++ −
⎪
⎪
⎨
⎪
=
⎪
⎩
(25)
and:
[]
1_ 1_ 1
1
2
1000
0100
0001
0010
iiTemi
BB B
T
T
β
⎧
⎡⎤
=
⎣⎦
⎪
⎪
⎡⎤
⎪
=
⎢⎥
⎨
⎢⎥
⎪
⎣⎦
⎪
=
⎪
⎩
(26)
Figure 5: The LQ controller design.
4 STABILITY STUDY
The quantum advance in stability theory that
allowed one the analysis of arbitrary differential
equations is due to Lyapunov, who introduced the
x
T
Ω
g
ls−
Ω
β
mec
T
em nom
T
−
em
TΔ
Tnom−
Ω
g
ls nom−−
Ω
i nom
β
−
i nom
β
−
ref
β
Δ
ref
β
em
T
T
ΔΩ
g
ls−
ΔΩ
β
Δ
mec
TΔ
u
i
K
−
()
ii1
wind
vvv
+
<<
mec nom
T
−
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
84

0 5 10 15 20 25 30 35 40 45 50
1.87
1.88
1.89
1.9
1.91
1.92
time (s)
rot at ional speed (rad/ s)
1
st
local model
improved LQ
classsic LQ
0 5 10 15 20 25 30 35 40 45 50
1.86
1.88
1.9
1.92
2
nd
local model
time (s)
rot ati onal speed (rad/ s)
0 5 10 15 20 25 30 35 40 45 50
1.84
1.86
1.88
1.9
3
rd
local model
time (s)
rot at ional speed (rad/ s)
classic LQ
improved LQ
improved LQ
classic LQ
0 5 10 15 20 25 30 35 40 45 50
1.84
1.86
1.88
1.9
1.92
4
th
local model
time (s)
rot at ional speed (rad/ s)
classic LQ
improved LQ
Figure 6: Comparison simulation between classic and improved LQ control laws.
basic idea and the definitions of stability that are in
use today. The concept of Lyapunov stability plays
an important role in control and system theory.
As we define a global model
M by fusion of two
successive local models
M
i
and M
i+1
, the
characteristic matrices of the system (13) can be
obtained by:
11
11
11
11
..
..
..
..
ikkkk
ikkkk
ikkkk
ikkkk
AA A
BB B
CC C
DD D
μμ
μμ
μμ
μμ
++
++
++
++
=+
⎧
⎪
=+
⎪
⎨
=+
⎪
=+
⎪
⎩
(27)
The input vector is calculated by:
()
11
...
kk k k
uKKx
μμ
++
=− +
(28)
Hereafter, the state vector can be represented as:
()
2
1
.. . .
.. 2. .. .
2
ij i i j
ij
ij ji
iii ij
iji
xABKx
GG
Gx x
μμ
μμμ
=+
=−
+
⎛⎞
=+
⎜⎟
⎜⎟
⎝⎠
∑∑
∑∑
(29)
where:
.
ij i i j
GABK=−
To study the global asymptotic stability of the
above system supplied by the multimodel LQ
control, the first necessity is to analyze the stability
of every local model. A
s we focus here especially on
the closed-loop system, the criterion of stabilization
consists then in finding, for a local model
M
i
, a
positive definite matrix
P that satisfies the following
LMI (Chedli, 2002; Liberzon and Morse, 1999):
..0
T
ii ii
GP PG+<
(30)
In the case of the multimodel systems, an extra
condition is to add to the LMI (30) in order to
guarantee the global stability (Chedli, 2002;
Liberzon and Morse, 1999; Kardous
et al., 2003)
and it consists in:
..0,
T
ij ij
QP PQ i j
+
<<
(31)
where
2
ij ji
ij
GG
Q
+
=
And in our case, only two successive local
models are valid at a time, which means that this
condition will be considered for i=1 to 3 and j=i+1.
5 SIMULTATION RESULTS
The proposed control approach and the stability
analysis of the controlled system have been
illustrated through simulations on Matlab Simulink.
The simulated wind turbine parameters are
presented in Table 1.
To calculate the linearization coefficients a
i
and
b
i
, the following c
p
empiric expression relative to
2MW wind turbines is used:
8
0.16
2
0.4 0.5
90
0.18 6.8 0.115
0.4 0.5
p
ce
λ
β
λ
−
+
+
⎛⎞
=× −− ×
⎜⎟
+
⎝⎠
(32)
Table 1: Wind turbine parameter values.
Parameters
Values
Air density ρ 1,22 Kg/m
3
Turbine radius R 40m
Nominal power P
nom
2MW
Nominal speed Ω
T
-nom
18 rpm
Optimal power
coefficient
c
p-opt
0.4775
Optimal speed ratio λ
o
p
t
9
Gearbox gain G 92.6
Turbine inertia JT 4.9×10
6
N.m.s²
Generator inertia Jg 0.9×10
6
N.m.s²
Mechanical coupling
damping coefficient
d 3.5×10
5
N.m
-1
.s
Mechanical coupling
stiffness coefficient
k 114×10
6
N.m
-1
PERFORMANCES IMPROVEMENT AND STABILITY ANALYSIS OF MULTIMODEL LQ CONTROLLED
VARIABLE-SPEED WIND TURBINES
85
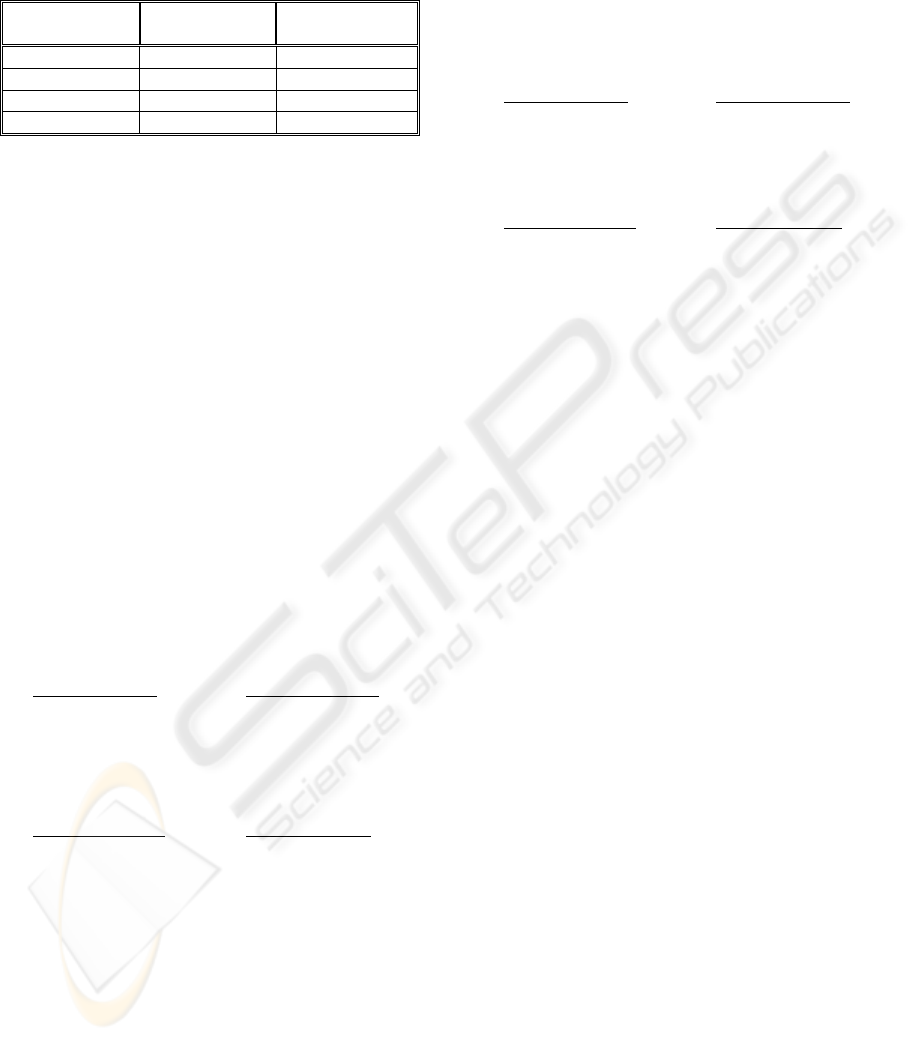
Table 2 describes the four local models multimodel
base used for the simulations.
Table 2: Multimodel base parameters.
Local model
Mi
Wind speed
vi (m/s)
Pitch angle
β
i-nom
(°)
M1 11.6 1.1
M2 14 8
M3 17 11.1
M4 25 15.4
From this base, four optimal gains are calculated.
And thus, the stability feasibility problem
consists in solving 8 LMI as shown after:
0(1 )
. . 0, 1..4 (4 )
..0,1..3, 1(3)
T
ii ii
T
ij ij
PLMI
GPPG i LMI
QP PQ i j i LMI
⎧
>
⎪
+<=
⎨
⎪
+<= =+
⎩
(33)
The simulation leads to the following result:
8.848 8.335 0.008 0.298
8.335 8.101 0.007 0.258
0.53 0.523 0.026 0.001
0.298 0.258 0.001 0.084
P
−−
⎛⎞
⎜⎟
−−
⎜⎟
=
⎜⎟
−−
⎜⎟
−−
⎝⎠
Finding this positive definite matrix P is a
sufficient condition proving the global stability of
the control technique presented above.
For the simulations, we had chosen to place the
closed loop poles for the local models at the left of
-α=-0.5. This gives the following poles for each
local model:
1
st
local model:
1
1.032 12.24
1.032 12.24
1
1.069
i
i
P
−+
⎡⎤
−−
⎢⎥
=
⎢⎥
−
⎢⎥
−
⎣⎦
2
nd
local model:
2
1.032 12.24
1.032 12.24
1
1.06
i
i
P
−+
⎡⎤
−−
⎢⎥
=
⎢⎥
−
⎢⎥
−
⎣⎦
3
rd
local model:
3
1.033 12.24
1.033 12.24
1
1.049
i
i
P
−+
⎡⎤
−−
⎢⎥
=
⎢⎥
−
⎢⎥
−
⎣⎦
4
th
local model:
4
1.037 12.24
1.037 12.24
1
1.046
i
i
P
−+
⎡⎤
−−
⎢⎥
=
⎢⎥
−
⎢⎥
−
⎣⎦
Thus, we can see that the pitch system pole (-1)
is invariant for the four local models, and that all the
other poles have their real parts less than –α.
To test the performance of this control strategy, a
series of simulation for several wind steps has been
performed to show the improvement of the studied
controller against a classic multimodel LQ controller
(Khezami et al., 2009).
The Figure 6 presents a comparison simulation
between the two control laws. For this simulation,
only the turbine rotational speed response for a wind
step of 0.5 m/s is presented for the four local
models.
The local models poles for the classic LQ
strategy have the following values:
1
st
local model:
1
0.346 12.25
0.346 12.25
1.162 + 0.868
1.162 0.868
i
i
P
i
i
−+
⎡
⎤
−−
⎢
⎥
=
⎢
⎥
−
⎢
⎥
−−
⎣
⎦
2
nd
local model:
2
1.2 12.401
1.2 12.401
2.693 + 2.013
2.693 2.0128
i
i
P
i
i
−+
⎡⎤
−−
⎢⎥
=
⎢⎥
−
⎢⎥
−−
⎣⎦
3
rd
local model:
3
1.62 12.587
1.62 12.587
3.417+2.287
3.417 2.287
i
i
P
i
i
−+
⎡
⎤
−−
⎢
⎥
=
⎢
⎥
−
⎢
⎥
−−
⎣
⎦
4
th
local model:
4
2.148 12.845
2.148 12.845
4.108+2.418
4.1081 2.418i
i
i
P
i
−+
⎡⎤
−−
⎢⎥
=
⎢⎥
−
⎢⎥
−−
⎣⎦
In the comparison between both strategies, the
system response for the proposed controller has
indeed kept almost the same response time (about
4s), unlike the case with the classic LQ where the
response times are varying from 12s for the 1
st
local
model to 2s for the 4
th
local model.
Compared to the proposed strategy, the classic
multimodel LQ control law shows responses with a
more oscillating transient mode.
The improvements of the multimodel LQ
controller consist in a more damped oscillatory
mode and a faster dynamic than the classical control
mode with an almost fixed response time for all the
local models.
The simulation of the system with the proposed
control strategy for a variable wind speed between
12m/s and 25m/s leads to the results presented in the
curves of Figure 7.
The Figure 7 (a) illustrates a realistic aspect of
the wind speed as described in a method elaborated
by C. Nichita in (Nichita et al., 2003). From this
aspect, the controller allowed a good regulation of
the generated electrical power (Figure 7 (d)) and the
rotation speeds of both the rotor (Figure 7 (b)) and
the generator (Figure 7 (c)) around their rated values
with taking into account the fatigue damage since
the mechanical torque (Figure 7 (e)) maintains an
almost constant value which thereby leads to have
alleviated mechanical loads.
The variations of the electromagnetic torque
presented in Figure 7 (g) are smooth. However, the
price paid for these performances is shown in Figure
7 (h) by a large activity of the pitch actuator.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
86

0 10 20 30 40 50 60 70 80 90 100
15
20
25
time (s)
Wind speed (m/s)
0 10 20 30 40 50 60 70 80 90 100
1.8
1.9
2
2.1
time (s)
Rotor speed (rad/s)
0 10 20 30 40 50 60 70 80 90 100
170
175
180
185
time (s)
Generator speed (rad/s)
0 10 20 30 40 50 60 70 80 90 100
1.9
2
2.1
2.2
x 10
6
time (s)
Generated power (W)
0 20 40 60 80 100
1
1.05
1.1
1.15
x 10
6
time (s)
Mechani cal t orque (Nm)
0 10 20 30 40 50 60 70 80 90 100
5
10
15
time (s)
Pitch angle (°)
0 10 20 30 40 50 60 70 80 90 100
1.1
1.15
1.2
x 10
4
time (s)
Electromagnetic torque (Nm)
0 10 20 30 40 50 60 70 80 90 100
0
20
40
time (s)
Control pitch angle (°)
Figure 7: Variation of the system variables.
6 CONCLUSIONS
This paper dealt with a technique of designing a
multimodel LQ regulator allowing to partially
control the process global dynamic, and with a study
of the global asymptotic stability of the controller by
means of a set of LMI. The proposed strategy
presented a compromise between different control
objectives: optimizing the performances of the
different system variables especially generating an
electrical power of a good quality, minimizing the
control efforts, alleviating the drive train dynamic
loads and controlling the global dynamic of the
studied process. The simulations results showed
good performances of the controller with acceptable
mechanical stress. But, satisfying such a trade-off
between all these objectives is indeed difficult and
the cost is however some high forces on the pitch
actuator. These effects brought more challenges in
the system analysis to improve the obtained results
in order to control actively the system dynamic and
to totally damp the oscillatory mode.
REFERENCES
Bianchi, F. D., Mantz, R. J. and Christiansen, C. F., 2004,
Control of Variable-speed Wind Turbines by LPV
Gain Scheduling. In Wind Energy, vol. 7, issue 1, pp:1-8.
Camblong, H., Rodriguez, M., Puiggali, J. R. and Abad,
A., 2002, Comparison of different control strategies to
study power quality in a variable-speed wind turbine.
In 1
st
World wind Energy Conference Proceeding,
Berlin.
Boukhezzara, B., Lupua, L., Siguerdidjanea, H. and Hand,
M., 2007. Multivariable control strategy for variable
speed, variable pitch wind turbines. In Science Direct,
Renewable Energy, vol. 32, pp: 1273–1287.
Kardous, Z. , Benhadj Braiek, N. and Al Kamel, A., 2006.
On the multimodel stabilization control of uncertain
systems – Part 1, In International Scientific IFNA-ANS
Journal: Problems on Nonlinear Analysis in
Engineering Systems, No 2.
Kardous, Z., Benhadj Braiek, N. and Al Kamel, A., 2007.
On the multimodel stabilization control of uncertain
systems – Part 2. In Int. J. of Problems of Nonlinear
Analysis in Engineering Systems, No.1(27), pp: 76-87,
vol. 13.
Bianchi, F. D., De Battista, H. and Mantz, R. J., 2007.
Wind turbine control systems: principles, modeling
and gain scheduling design, Springer-Verlag. London,
1
st
edition.
Munteanu, I., Bratcu, A. I., Cultululis, N. A. and Ceanga,
E., 2005. A two loop optimal control of flexible drive
train variable speed wind power systems, 16
th
Triennial World Congress-IFAC, Prague.
Khezami, N., Guillaud, X., and Benhadj Braiek, N., 2009.
Multimodel LQ controller design for variable-speed
and variable pitch wind turbines at high wind speeds.
In IEEE International Multi-conference on Systems,
Signals and Devices, Djerba.
(a)
(b)
(c)
(d)
(e) (f)
(g)
(h)
PERFORMANCES IMPROVEMENT AND STABILITY ANALYSIS OF MULTIMODEL LQ CONTROLLED
VARIABLE-SPEED WIND TURBINES
87

Poulsen, N. K., Larsen, T. J., and Hansen, M. H., 2005.
Comparison between a PI and LQ-regulation for a 2
MW wind turbine. Risø National Laboratory-I-2320.
Hammerum, K., Brath1, P. and Poulsen, N. K., 2007. A
fatigue approach to wind turbine control. In Journal of
Physics: Conference Series 75.
Cutululis, N. A., Bindner, H., Munteanu, I., Bratcu, A.,
Ceanga, E., and Soerensen, P., 2006. LQ Optimal
Control of Wind Turbines in Hybrid Power Systems.
In European Wind Energy Conference and Exhibition,
Athens.
Chedli, M., 2002. Stabilité et commande de systems
décrits par des multimodèles. PhD thesis, Institut
National Polytechnique de Lorraine.
Liberzon, D. and Morse, A. S., 1999. Basic problems in
stability and design of switched systems. In IEEE
Control Systems Magazine, vol. 19, pp: 59-70.
Kardous, Z., Elkamel, A., Benhadj Braiek, N. and Borne,
P., 2003. On the quadratic stabilization in discrete
multimodel control. In IEEE Conference on Control
Applications, vol.2, pp: 1398-1403.
Nichita, C., Luca, D. and Dakyo, B., 2003. Méthodes de
simulation de la vitesse du vent. In Decentralized
energy seminar, Toulouse.
*
This work was supported by the CMCU project number:
08G1120
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
88
