
SEMANTIC SUPPORT FOR
RESOURCE-CONSTRAINED ROBOT SWARM
Xiang Su, Jukka Riekki and Janne Haverinen
Intelligent Systems Group and Infotech Oulu, University of Oulu, FIN-90014, Finland
Keywords: Robot Swarm, Entity Notation, Lightweight Data Representation, Ontology, Inference.
Abstract: Semantic Web technology could offer lots of intelligent functionality to multi-robot systems. But limited
processing power and storage capability of unsophisticated robots do not necessary allow them to support
and process Semantic Web technology. In this paper, we propose a novel solution to provide semantic
support for resource-constrained robots. Entity Notation is a lightweight data representation which can be
employed to transfer data between resource-constrained robots and intelligent applications at server side.
Resources-constrained robots only need to handle the lightweight Entity Notation while intelligent
applications handle the more advanced knowledge representation. When the Entity Notation is used, the
transfer between the robots and applications is unambiguous and lossless. In this way, an ontology and
ontology-based inference at server side can improve the capabilities of the robot swarm. We present a
simulator and discuss the future work.
1 INTRODUCTION
Research in multi-robot systems is producing more
and more robot swarm systems containing up to
hundreds of autonomous robots. Robot swarms can
be utilized in numerous interesting domains, like
space exploration, search and rescue operations,
cleaning, and other everyday applications.
Compared with individual complex autonomous
robots, swarms of simple and cost-efficient robots,
provide robustness against failure of individual
robots and the power of parallel operation.
To build the complex and intelligent structure of
a robot swarm, coordination among spontaneous
swarms, like stigmergy (
Holland and Melhuish 1999),
or environment-supported coordination is essential.
In this paper, we present how semantic support can
be provided for resource-constrained robots to
facilitate their coordination. Basically, the semantic
support enables reasoning the actions for achieving
the swarm’s goal.
Semantic Web technology is an ideal candidate
for implementing the reasoning, when information
can be expressed using a Semantic Web-based
formal context model – an ontology model (
Studer,
Benjamins and Fensel 1998
). But traditionally,
Semantic Web technology needs more processing
power and memory than small robots have. Hence
the robots are not capable to processing knowledge
representations such as Resource Description
Framework (RDF) (W3C.org 2004), not to mention
running the advanced reasoners or other applications
utilizing the representations.
This paper focuses on how resource-constrained
robots can be connected to Semantic Web–based
intelligent applications that have the required
resources for processing the knowledge
representations and running the reasoners. We
consider how information can be transferred from
resource-constrained robots to an advanced
knowledge representation, how actions can be
deduced, and how the actions can be transferred to
the robots performing them.
For transferring information from resource-
constrained robots to intelligent systems we propose
a lightweight representation called Entity Notation
(EN). The key idea is that the robots handle the
lightweight EN while the intelligent systems handle
the advanced knowledge representation – and an
unambiguous lossless transform can be performed
between these two representations. We develop for
the knowledge representation a context information
ontology for describing robots, sensors, persons, and
other important entities of an indoor office
environment. This ontology allows us to use
Semantic Web technologies in deducing actions for
the robots. We utilize rule-based inference for
271
Su X., Riekki J. and Haverinen J. (2009).
SEMANTIC SUPPORT FOR RESOURCE-CONSTRAINED ROBOT SWARM.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 271-277
DOI: 10.5220/0002217402710277
Copyright
c
SciTePress

deducing actions for robot swarm.
The rest of this article is organized as follows.
Section 2 introduces the architecture of EN-based
communication. Section 3 presents the Entity
Notation in brief. Section 4 presents the context
information ontology model. Section 5 describes the
rules and our inference mechanism. Section 6
presents the simulator for testing the system. Section
7 introduces the related work and Section 8
concludes the paper and suggests future work.
2 ENTITY NOTATION-BASED
COMMUNICATION
ARCHITECTURE
Figure 1 presents a complete loop of EN-based
communication architecture for a robot system. EN
packets are utilized in all communication acts
between a robot swarm and a swarm server. This
robot swarm system consists of cleaning robots,
RFID tags, sensors, an air conditioner, and the
swarm server. A cleaning robot can measure the
light level and the temperature of a room and read
data from and write data to RFID tags. Robots and
sensors can communicate with the swarm server.
The swarm server includes ontology models, EN
composer/decomposer, and inference engine
components. It provides semantic support to robots
by receiving data from robots and sending the
actions to be performed back to corresponding
robots. This EN-based feedback loop is a key feature
of adaptive robot system.
In the application scenario shown in Figure 1,
the RFID tag in one room is marked with the
timestamp of cleaning work inside this room. When
a cleaning robot goes inside this room, it reads the
RFID tags of the room, and measures whether light
is on in this room. This information can be
transferred to the swarm server as EN packets. The
swarm server decomposes the EN packets and
transfers them to RDF statements in a lossless way.
When the context information ontology model is
supplied with new RDF statements, the reasoner is
triggered, the deduced statements are composed into
EN format and sent to the devices. Deduced
statements can be some information to a specific
device, like message “Cleaning robot521 cleans the
room TS354” should be sent to Cleaning robot521.
The statements can also be some general
information, like “Room TS354 is clean.” should be
sent to all cleaning robots subscribed room cleanness
information. In the process of compose/decompose
EN packets, we use communicative acts ontology
model to standardize the communicative acts
between robots and swarm server, which could be
attached as the first EN packet to indicate the type of
the following packet sequence. For example, the
‘ifRoomSituation’ packet will indicate that the
following packet will inform the situation of a
specific room, while the ‘ifCleanRoom’ packet will
follow with a packet to inform a specific cleaning
robot an action of cleaning a room.
Another use case of EN-based communication in
figure 2 is that, a temperature sensor measures the
temperature in room TS354, and sends the
measurement data to the same swarm server by
utilizing EN. The reasoner could deduce that “Air
conditioner of TS354 adjusts the temperature to
23 ºC.” or “TS354 has normal temperature.”
Figure 1: Loop of EN-based Communication.
3 ENTITY NOTATION
Entity Notation is introduced briefly in this section
and more detailed description can be found in the
publication by Riekki, Su and Haverinen (2008). EN
was designed as a lightweight representation for
exchanging information between nodes of a
distributed system. We started to develop EN as a
general representation that can be used by any
resource-constrained device, but now we are
focusing on mobile robots. It’s not a protocol, hence
we assume EN packets are payload of some
protocols delivering the packets, like HTTP or
TCP/IP.
The most important goals for developing EN are
that, on the one hand, it can be used over simple
communication links by resource-constrained
devices; on the other hand, the packet content can be
used in a straightforward fashion by intelligent
system. For example, it should be possible to
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
272

transform the packets into RDF format in an
unambiguous fashion.
We achieve these goals as follows. To support
resource-constrained robots and limited
communication links, EN offers short packets that in
their simplest form can be less than 40 bytes long.
To allow the packet content to be utilized by
Semantic Web applications, the EN offers complete
packets that can be transferred to advanced
knowledge representations – RDF unambiguously
and losslessly. Hence, packet content can be
delivered to a reasonor processing knowledge in
Web Ontology Language (OWL) format. Complete
packets and short packets can be transferred between
each other straightforwardly and unambiguously.
The complete EN packet format closely follows
the RDF format, which contains a sequence of
(subject, predicate, object) triplets. The EN, as its
name implies, describes entities. An entity is some
identifiable whole, physical or digital. For example,
a robot, a sensor, an RFID tag, a sending node, a
recipient, a person, a measurement, a message, and a
user terminal are entities.
An EN packet is a sequence of entity
descriptions. Each description specifies the type of
an entity, a unique entity identifier, and a number of
property triplets (name, type, value). XML Schema
types are used for describing the data type of
property value. An entity description is of the form:
[EntityTye EntityID
PropertyName PropertyType PropertyValue
…
PropertyName PropertyType PropertyValue
]
An entity description contains a set of triplets
about a single entity. EntityId specifies the subject,
PropertyName is a predicate, and PropertyValue is
an object. EntityType and PropertyType specify the
types of the corresponding subject and object. It is
necessary that elements in EN packet are self-
describing. PropertyValue in EN can be an identifier
of the other entity, and additional statements can
give information about those entities. This allows
relations to be represented. The relations can be
between physical entities, e.g. a robot is in a room.
Or, the relations can be between digital entities. For
example, the first entity of a message can specify a
list and refer to all list member entities.
Here is an example in which a room entity
description refers to a temperature sensor in that
room. For convenience, in this and all the following
examples we replace "http://ee.oulu.fi/o" by "EE"
and "http://www.w3.org" by "W3":
[EE#Room EE#room1879
EE#hasTempSensor EE#EntityId
EE#tempSensor234
]
[EE#TempSensor EE#tempSensor234
EE#tempValue W3/2001/XMLSchema#float
“23.5”
EE#timestamp
W3/2001/XMLSchema#dateTime
“2007-10-22T12:00:00-17:00:00”
]
The type EntityID is an exception in the type
system as all other types are XML Schema types.
EntityId specifies the corresponding property value
to be an entity identifier – not a literal URI (that
would be the XML Schema type anyURI). Literals
are enclosed in double quotes, as some data types
such as base64Binary data type can contain white
space but not double quotes. EN has the ability to
carry any primitive data type defined in XML
Schema types, including text data, binary data, et al.
A complete packet can be transferred to a RDF
description in a straightforward fashion because of
their natural relationship. The entity type can be
represented as a resource class (using the rdf:type
property) and the entity identifier is the identifier of
the resource. Property names and values can be
mapped directly, and the property type can be
represented by adding a rdf:datatype attribute to the
property element. Here is the RDF graph
corresponding to the example above.
Figure 2: RDF graph representing a sensor’s data package.
Complete EN packets can be quite long because
of meaningful type names and URIs. To shorten the
complete packets, we suggest templates and
prefixes. The basic idea is that a template contains a
description of the constant part of a packet and
placeholders for the variable parts that differ in each
packet. The packet sent over the communication link
needs to contain only the template identifier and the
changing information. A complete packet can then
be assembled by replacing the template’s
SEMANTIC SUPPORT FOR RESOURCE-CONSTRAINED ROBOT SWARM
273

placeholders with the values contained in the
package. Prefixes are used where the values are
URIs. Such as the above example of room entity and
temperature sensor inside, if we have for the packet
the templates:
[EE#Room EE#room1879
EE#hasTempSensor EE#EntityId ?1
]
and
]
[EE#TempSensor EE#tempSensor234
EE#tempValue W3/2001/XMLSchema#float
?1
EE#timestamp
W3/2001/XMLSchema#dateTime ?2
]
And then template has the identifier urn:uuid:
ad7g38 and urn:uuid:5e76af, we can represent
the packets as:
[urn:uuid:ad7g38 EE#tempSensor234]
[urn:uuid:5e76af
“23.5”
“2007-11-22T12:00:00-17:00:00”]
Robots and swarm server can have predefined
templates for each packet they can send. Usage of
short packets can either be decided by the engineer
at design time or the robots can use complete
packets by default and agree the short format during
communication. The negotiation of EN packets is
not in the scope of this paper.
4 THE CONTEXT
INFORMATION ONTOLOGY
MODEL
Context information gathered from environment can
increase a robot swarm’s capabilities by enabling
them to adapt to the conditions of environment. By
context, we refer to any information that can be used
to characterize the situation of an entity (
Dey and
Abowd 2000
).
An ontology-based approach lets us describe
contexts semantically, and share common
understanding of context among devices, users, and
services. Here, ontology refers to the formal, explicit
description of concepts, which are often conceived
as a set of entities, relations, instances, functions,
and axioms. Our context information ontology
model facilitates context reasoning, context sharing
and reuse. For example, the model can be extended
with information about other devices, or it can be
merged with another ontology to describe a larger
domain. We will introduce ontology-reasoning and
general-purpose rule-based reasoning in the next
section.
Figure 3: Main catalogue of Context Information
Ontology Model.
In our scenario, we assume a smart house which
is equipped with networked robots and devices, such
as cleaning robots, RFID tags, temperature sensors,
and air conditioners. As shown in Figure 3, context
information ontology models the basic concepts for
our scenario, like device, environment, person, time
and location; describes properties and relationship
between these concepts. The context information
ontology can be extended to different environment
easily depending on other application scenarios.
5 INFERENCE MECHANISM
As discussed above, inference engine will be
triggered when the information from robots is added
into context information ontology. New knowledge
will be produced by reasoner and distributed to
devices in EN format. If the EntityID of the deduced
statement is one device, EN composer will add one
header packet before other packets and deliver them
to that device. If its EntityID is not device, the
swarm server will distribute it to robots have
subscribed this information.
Currently, our inference mechanism supports
OWL Lite inference and rule-based inference. OWL
Lite inference supports constructs of describing
classes, properties, and also relationship between
classes and properties. The following example
illustrates that a subClassOf relationship among
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
274

devices is transitive.
(CleaningRobot rdfs:subClassOf Robot)
∧
(Robot rdfs:subClassOf Device) ->
(CleaningRobot rdfs:subClassOf Device)
Rule-based inference could provide forward
chaining, backward chaining and hybrid models to
execute rules over RDF graph. Here are example
rules to show how robots’ data is reasoned and how
reasonor deduces an informed action. In these rules,
a cleaning robot tests whether the light of room
TS354 is on, and reads previous cleaning time from
RFID tag. If the light is on, it may means that
someone is working in the office, cleaning robot will
go away. If previous cleaning time is not longer than
24 hours, room is no need to be cleaned. In case that
the light is off and previous cleaning time is longer
than 24 hours, cleaning robot will clean this room.
(roomTS354, lightIntensity, on) ->
(cleaningRobot521, goAway, roomTS354)
(rfidTS354, previousCleaningTime, ?PT)
∧
lessThan(currentTime-PT, 24hours) ->
(cleaningRobot521, goAway, roomTS354)
(roomTS354, lightIntensity, off)
∧
(rfidTS354, previousCleaningTime, ?PT)
∧
greaterThan(currentTime-PT, 24hours)
-> (cleaningRobot521, clean, roomTS354)
6 SIMULATOR
We develop a simulator to simulate the EN-based
communication between devices and provide the
semantic support from the swarm server. We create
four types of devices in the simulator: cleaning robot,
temperature sensor, a wireless device designed for
reporting the patient’s well-being to nurses (Riekki
et al. 2007) and a location sensor. In the indoor robot
system scenario we described in this paper, we pay
attention to cleaning robot and temperature sensor in
the simulator.
In the simulator, the user can specify messages for
any device, assemble short packets or complete
packets, and send them to the swarm server. The
swarm server transforms packets into RDF format,
adds them into context information ontology model,
and reasons on data from the robots. The deduced
result will be delivered to the specific device or all
devices according to the entity identification of the
deduced packet. We add one entity in front of each
message to describe the message itself: the type, the
sender, receiver, and a sequence number. This entity
is included in template. In a real implementation,
such an entity will not be needed if the same
information is carried by the lower layer protocol.
Figure 4 shows situations in which the cleaning
robot has sent a short packet to the swarm server and
got responded action. In the cleaning robot window,
user can specify the details of the message: the
receiver’s ID, message type, and the data content
which shows the room situation that the cleaning
robot is located in, including previous cleaning time
and whether the room’s light is on. Cleaning robot
can assemble complete or short message, and will
get corresponding message format from the swarm
server. The swarm server responds the robots’
message automatically, and sends the deduced
message according to the rules specified in previous
section.
The first screenshot in Figure 4 shows a short
packet including the previous cleaning time and light
on/off as following:
[urn:uuid:9c38ee “900”
“2008-05-26T05:00:00” “false”]
In this message, the identifier
urn:uuid:9c38ee determines the template, 900 is
the sequence number, and the last two values are the
previous cleaning time of the room and the light off
boolean tag. The swarm server deduces that the
cleaning robot should clean this room TS354 and
informs the cleaning robot to clean it by the
following short packet:
[urn:uuid:bd61dee5-e9b8-422e-948d-
e7799caae04b “1001” EE#TS354 “pending”]
In this message, 1001 is sequence number, and
the following value shows the room need to be
cleaned and the action status is pending.
In the simulator, the swarm server and the robots
can send 17 different packets in total: the server can
send requests to the robots, while the robots can
reply to the server’s requests, and send
asynchronous inform to the server. We calculate the
length of these 17 packets, and find the result is
quite promising. Short EN packet format contains on
the average only 12.68% of the characters that a
complete package contains and 9.67% of the
characters that the corresponding RDF document
contains.
SEMANTIC SUPPORT FOR RESOURCE-CONSTRAINED ROBOT SWARM
275
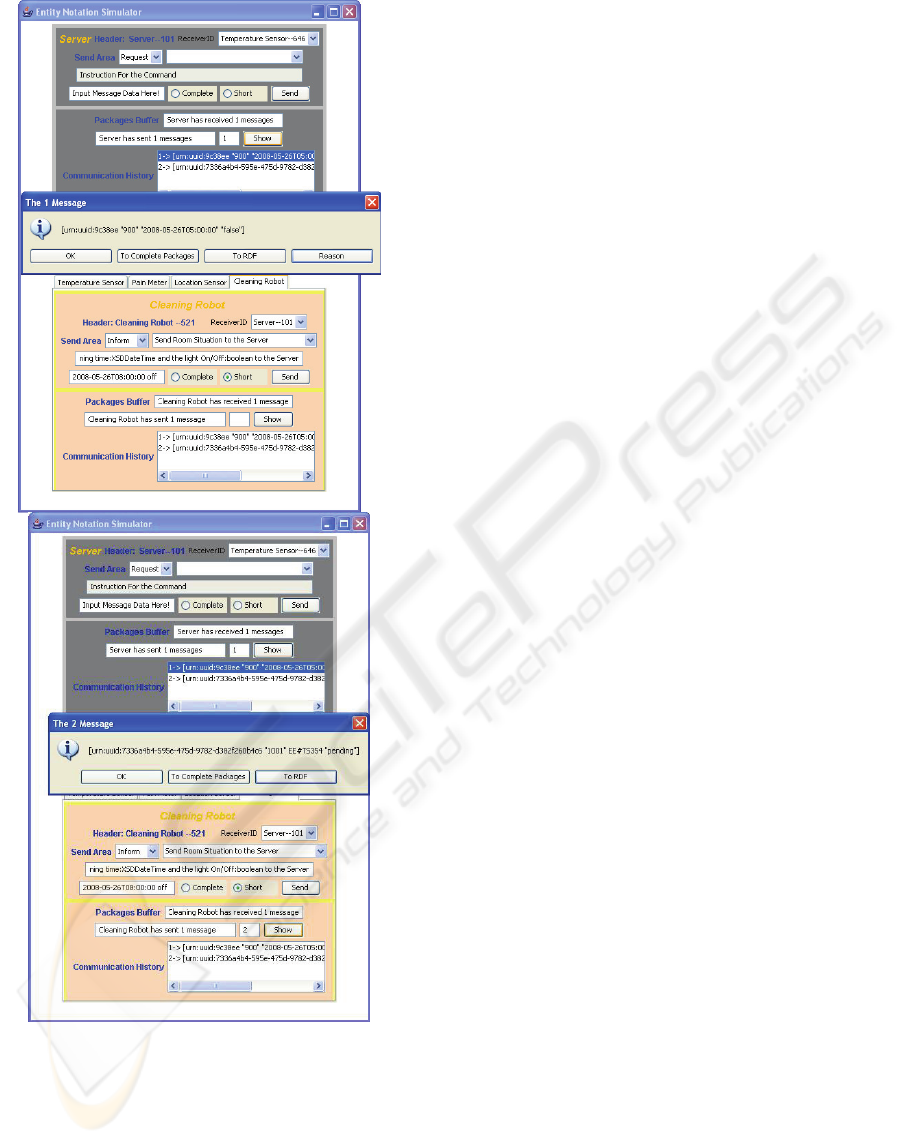
Figure 4: The Simulator Simulates the Cleaning Robot
Scenario.
7 RELATED WORK
The idea of using Semantic Web technology to
facilitate swarm intelligence has been reported by
Boley (2007), but no resource-constrained robots
have been integrated into the Semantic Web-based
system before. We propose EN as a lightweight data
representation for robots to support Semantic Web
technology. We have compared EN in (Riekki, Su
and Haverinen 2008), with XML compression
technologies, e.g. Gzip (
Gzip.org 2003), XMLPPM
(
Cheney 2000), XMLZip (XMLSolutions 1999), and
some markup or data serialization languages, like
JSON (
json.org 1999), and YAML (yaml.org 2008).
The result shows that the EN can almost reach the
best compression ratio among XML compression
technologies, while requiring minimal amount of
computation for composing EN packets. Another
alternative is binary XML formats, e.g. EXI
(
W3C.org 2008), WAP Binary XML Content Format
(
W3C.org 1999), and Infoset (W3C.org 2004). They
are designed to provide a compact representation of
XML for communication. They mainly use token-
based compression schema in which each element,
attribute, and so forth is encoded as a small integer
value. Compared with them, EN could reach better
compression rate and require less message
sterilization processing power. Besides, EN has the
advantage over the XML compression and binary
XML solutions is that the EN packets are more
human readable.
Many systems also adopted the solutions of
expressing context information as ontology and
using Description Logic (DL) based rules. Chen et
al. (2004) proposed OWL to represent context
information, and they utilized Java Expert System
Shell (Jess) (
Friedman-Hill 2008) to realize rule-based
reasoning. Want et al. (2004) also modelled context
by OWL in semantic Space project. They designed a
two-layer context model for expressing context
information, and reasoning was implemented using
Jena. Korpipää et al. (2003) also presented a work
on developing a lightweight ontology for mobile
device context-awareness. But their context structure
is represented using RDF, and this ontology contains
only concepts, properties, and concept taxonomies,
but no constraints. Our system has the advantage
that the system can produce real-time deduced
packets, and inform the robot swarm to perform
them.
8 CONCLUSIONS
This paper presented an approach for semantic
support of resource constrained robots in intelligent
applications. We described our EN-based
communicative architecture, which can complete the
loop between robots and the swarm server by EN
packets. We proposed EN formats, context
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
276

information ontology model, and a reasoner based
on context information. We presented experiments
and some promising results using a simulator.
The EN-based communicative architecture can
be utilized for very resource-limited robots. It
enables semantic functionality for the swarm of
robots. The EN allows very simple and short packets
to be sent by the robots; on the other hand these
packets can be transformed into advanced
knowledge representations in an unambiguous
fashion. For example, when the robot does not even
contain any OS but all functionality is programmed
directly using C, it is straightforward to use UUID
values as constants that are used to identify received
packets and placed at the beginning of the sent
packets.
The swarm server can transform EN packets
from the robots into RDF format, use the
information to deduce new tasks relevant to context
information, and adapt the operation of the swarm to
perform given actions efficiently. The context
information ontology model and inference
mechanism of swarm server provide semantic
support for the swarm robots.
The simulation result shows that the length of
short packets is less than 10% of the corresponding
RDF document’s length. These results are compared
with other lightweight representation. Furthermore,
when short EN packets are used, only composer and
decomposer are needed for pre-process. A resource-
constrained device does not need to run any complex
algorithm to process the packet.
The future work includes building the first
prototype where real robots use our EN-based
communication. We will consider the uncertainty
and dynamics in a real robot swarm system. EN can
also be used in robot-to-robot communication in
order to minimize bandwidth and computational
overhead. Finally, we will develop the lightweight
communication framework further based on this
work, for example, to make more complex data
structure be transferred to EN possible.
ACKNOWLEDGEMENTS
This work was funded by Infotech Oulu. The author
would like to thank the participants of
ROBOSWARM project.
REFERENCES
Boley, H & Chang, E 2007. Digital Ecosystems:
Principles and Semantics, in Proceeding of IEEE
International Conference on Digital Ecosystems and
Technologies. IEEE Computer Society Press, Cairns, pp.
398-403.
Chen, H, Finin, T, Anupam, J, Kagal, L, Perich F & Dipanjan,
C 2004, ‘Intelligent Agents meet the Semantic Web in
Smart Spaces’, Internet Computing, vol. 8, no. 6, pp.
1545-1651.
Cheney, J 2000. Compressing XML with Multiplexed
Hierarchical PPM Models, in Proceedings of the IEEE
Data Compression Conference. IEEE Computer Society
Press, Snowbird, pp.163-172.
Dey, A & Abowd, G 2000. Towards a Better Understanding
of Context and Context-Awareness, in Workshop the
what, who, where, when, and how of context-awareness at
CHI 2000. ACM Press.
Friedman-Hill, E 2008, Jess, the rule engine for the javaTM
platform, viewed by 24 April 2009,
<http://herzberg.ca.sandia.gov/jess/index.shtml>.
Gzip.org 2003, The gzip home page, viewed 24 April 2009,
<http://www.gzip.org/>.
Holland, O & Melhuish, C 1999. ‘Stimergy, Self-
Organization, and Sorting in Collective Robots’, Artificial
Life, vol.5, no. 2, pp. 375-393.
Json.org 1999, Introducing JSON, viewed 24 April 2009,
<http://www.json.org/>.
Korpipää, P, Mantyjärvi, J, Kela, J, Keranen, H & Malm, EJ
2003. ‘Managing Context Information in Mobile
Devices’, Pervasive Computing. vol.2, no. 3, pp. 42-51.
Riekki, J, Alakärppä, I, Koukkula, R, Angeria, J, Brockman,
M & Saloranta, T 2007, Wireless Pain Monitoring, in The
2nd International Symposium on Medical Information
and Communication Technology. University of OULU
Press.
Riekki, J, Su, X & Haverinen, J 2008. Connecting Resource-
Constrained Robots to Knowledge-Based System, in
Proceeding of International Conference on Modelling,
Identification and Control. ACTA Press.
Studer, R, Benjamins, VR & Fensel, D 1998. ‘Knowledge
engineering: principles and methods’, Data Knowledge
Engineering, vol.25, no.1-2, pp. 161-198.
Wang, X, Dong, JS, Chin, CY, Hettiarachchi, SR & Zhang, D
2004, ‘Semantic Space: An Infrastructure for Smart
Spaces’, Pervasive Computing, vol.3, no. 3, pp. 32-39.
W3C.org 2004, RDF Primer, viewed 24 April 2009,
<http://www.w3.org/TR/REC-rdf-syntax/>.
W3C.org 2008, Efficient XML Interchange (EXI) Format 1.0,
viewed 24 April 2009, http://www.w3.org/TR/2008/WD-
exi-20080919/.
W3C.org 1999, WAP Binary XML Content Format, viewed
24 April 2009, <http://www.w3.org/TR/wbxml/>.
W3C.org 2004, XML Information Set (Second Edition),
viewed by 24 April 2009, <http://www.w3.org/TR/xml-
infoset/>.
XMLSolutions 1999, XMLZip - XML Solutions, viewed 07
June 2008, <http://www.xmls.com/>.
Yaml.org 2008, YAML Ain’t Markup Language Version
1.2, viewed 24 April 2009, <http://yaml.org/spec/1.2/>.
SEMANTIC SUPPORT FOR RESOURCE-CONSTRAINED ROBOT SWARM
277
