
LARGE-SCALE DEXTEROUS HAPTIC INTERACTION
WITH VIRTUAL MOCK-UPS
Methodology and Human Performance
Damien Chamaret, Paul Richard
LISA Laboratory, University of Angers, 62 avenue Notre Dame Du Lac, Angers, France
Sehat Ullah
IBISC Laboratory, University of Evry, 40 rue du Pelvoux, Evry, France
Keywords: Virtual Environment, Virtual Mock-up, Large-scale, Haptic Interaction, Human Performance.
Abstract: We present a methodology for both the efficient integration and dexterous manipulation of CAD models in
a physical-based virtual reality simulation. The user interacts with a virtual car mock-up using a string-
based haptic interface that provides force sensation in a large workspace. A prop is used to provide grasp
feedback. A mocap system is used to track user’s hand and head movements. In addition a 5DT data-glove
is used to measure finger flexion. Twelve volunteer participants were instructed to remove a lamp of the
virtual mock-up under different conditions. Results revealed that haptic feedback was better than additional
visual feedback in terms of task completion time and collision frequency.
1 INTRODUCTION
Nowadays, Car manufacturers use Computer Aided
Design (CAD) to reduce costs, time-to-market and to
increase the overall quality of products. In this
context, physical mock-ups are replaced by virtual
mock-ups for accessibility testing, assembly
simulations, operation training and so on. In such
simulations, sensory feedback must be provided in an
intuitive and comprehensible way. Therefore, it is of
great importance to investigate the factors related to
information presentation modalities that affect human
performance. This paper presents a methodology for
both the efficient integration and dexterous
manipulation of CAD models in a physical-based
virtual reality simulation. The user interacts with a
virtual car mock-up by using a string-based haptic
interface that provides force sensation in a large
workspace. An experimental study was carried out to
validate the proposed methodology and evaluate the
effect of sensory feedback on operator’s
performance. Twelve participants were instructed to
remove a car’s lamp from a virtual mock-up. Three
experimental conditions were tested concerning
sensory feedback associated with collisions with the
virtual mock-up: (1) no-feedback (only graphics), (2)
additional visual feedback (colour) and (3) haptic
feedback. Section 2 describes the CAD-to-VR
methodology. Section 3 presents the virtual
environment (VE) that allows large-scale haptic
interaction with the virtual car mock-up. In section 4,
the experimental study and the results are presented.
The paper ends by a conclusion and gives some
tracks for future work.
2 CAD-TO-VR METHODOLOGY
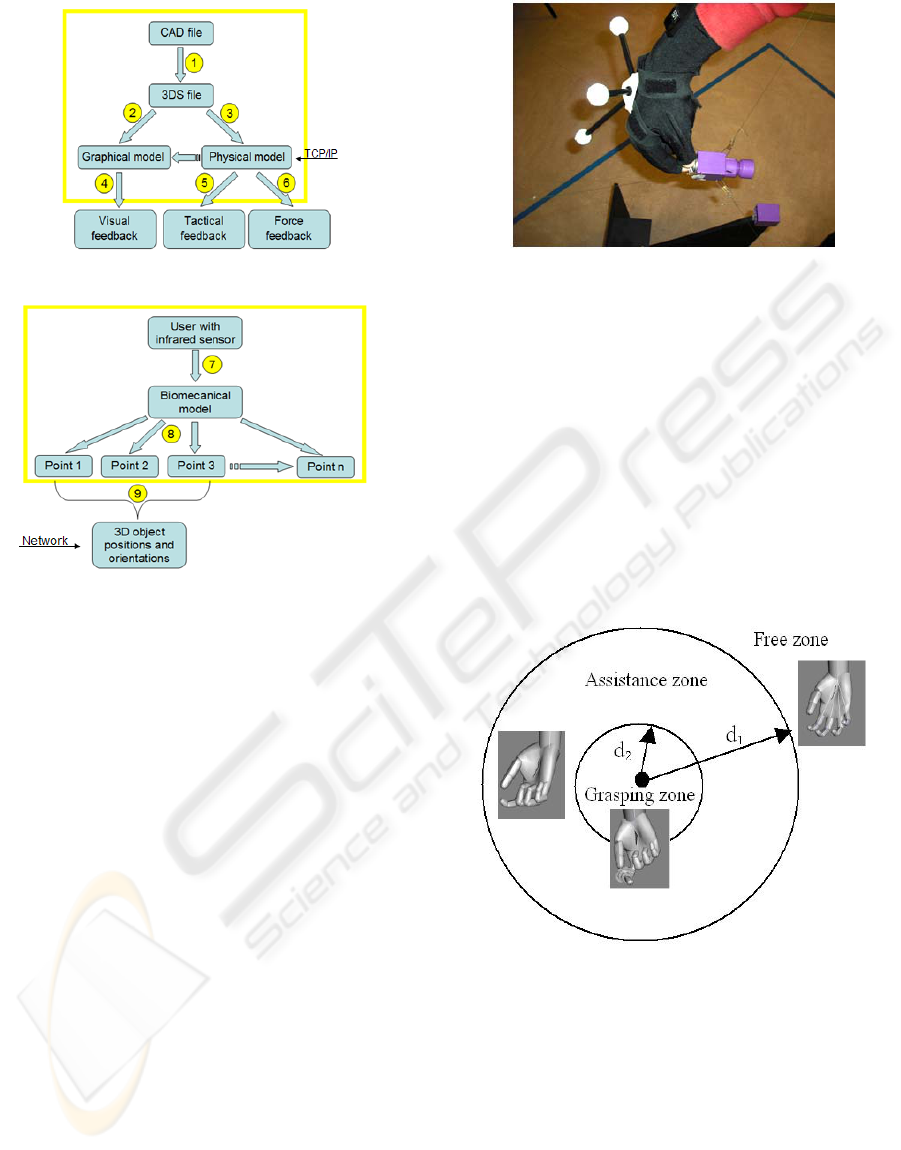
The proposed CAD-to-VR methodology involves
different steps (illustrated in Figure 1a), such as
model simplification (1), model integration (2-3).
The graphical model is used for visual display of the
virtual mock-up (4), while the physical one is used
for both tactile and kinaesthetic feedback (5-6). Our
methodology for model simplification allows to
decrease the number of polygons of the CAD models
while keeping the same level of visual quality. Model
integration allows to obtain both graphical and
physical models of CAD data. Physical models are
built using PhysX engine (www.nvidia.com).
453
Chamaret D., Richard P. and Ullah S. (2009).
LARGE-SCALE DEXTEROUS HAPTIC INTERACTION WITH VIRTUAL MOCK-UPS - Methodology and Human Performance .
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 453-456
DOI: 10.5220/0002219404530456
Copyright
c
SciTePress
(a)
(b)
Figure 1: Schematic of the CAD-to-VR methodology (a)
and human interaction using the mocap system (b).
3 VIRTUAL ENVIRONMENT
Our methodology also allows the integration of both
the graphical and physical models of users (Figure
1b). A biomechanical model is used for the animation
of operator’s hand and arm (7). In order to get
accurate position and orientation tracking of the user,
an infrared camera-based motion capture system is
used. Six reflected markers are placed on the
operator’s body (8): three markers on the data-glove
to assess hand position and orientation (9), one
marker on a cap worn by the operator for head
tracking, and two markers on the operator’s arm.
The large-scale VE provides force feedback using
the SPIDAR system (Space Interface Device for
Artificial Reality) (Ishii and Sato, 1994).
Stereoscopic images are displayed on a rear-
projected large screen (2m x 2.5m) and are viewed
using polarized glasses. The SPIDAR system uses a
SH4 controller from the Cyverse (Japan). In order to
provide force feedback to both hands, a total of 8
motors are placed on the corners of a cubic frame
surrounding the user. In order to provide haptic
grasping feedback to the operator, a prop (see Figure
2) was used (Chamaret et al., 2008).
Figure 2: The prop (real car lamp inside a plastic cap) used
for grasping feedback.
Poor grasp of the prop or a bad calibration due to
unexpected movements may cause problems of
feedback coherency between grasping (prop) and
simulated forces (SPIDAR). To avoid these
problems, three zones were defined: (a) a free zone
where the user can freely moves his/her hand (hand
position/orientation and fingers flexion) using a 5DT
data glove, (b) an assistance zone (d
1
= 10 cm from
the virtual lamp) where the user is no more able to
change fingers flexion, and (c) a grasping zone (d
2
=
5 mm from the virtual lamp) where the grasping
gesture is realized (Figure 3):
Figure 3: Illustration of the three zones used for the
grasping simulation and assistance.
4 EXPERIMENTAL STUDY
The aim of this experiment is twofold: (1) validate
the proposed CAD-to-VR methodology including
operator’s biomechanical model integration, and (2)
investigate the effect of haptic and visual feedback
on operator performance in a task involving
extraction and replacement of a car’s lamp in a
virtual car mock-up.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
454
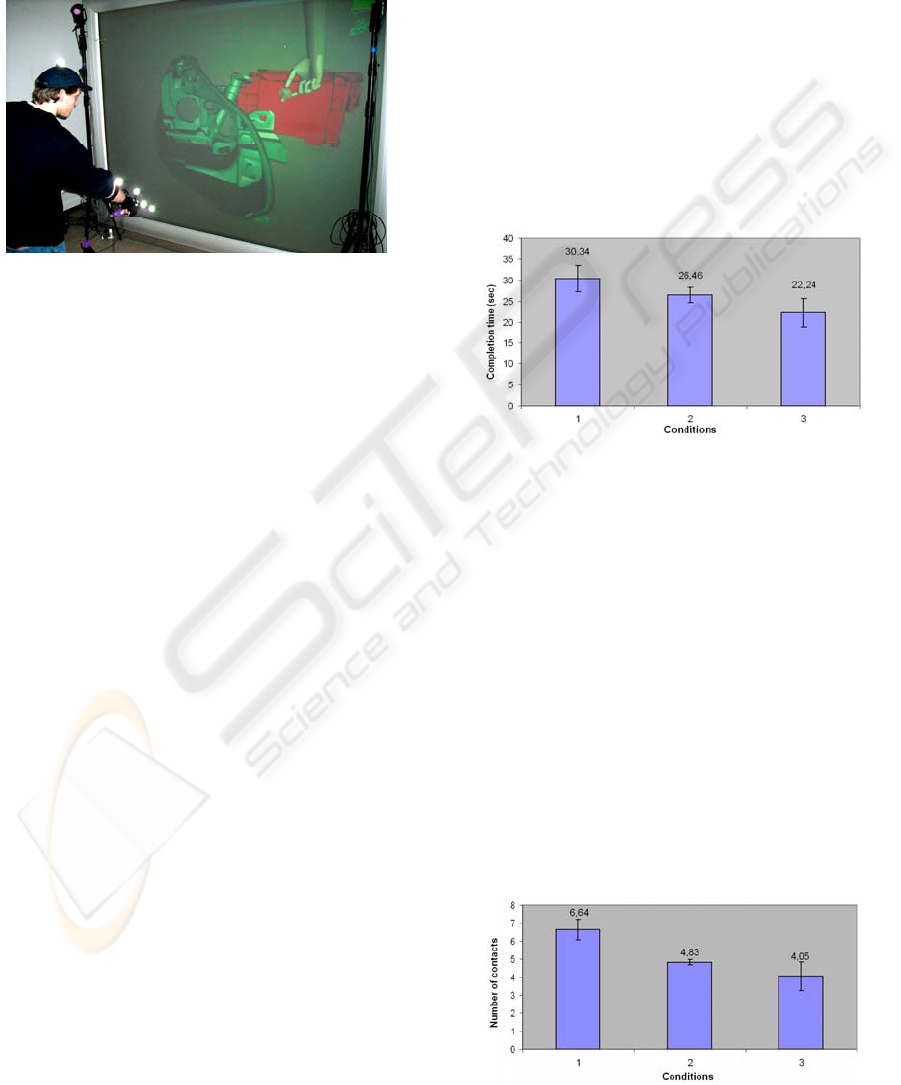
4.1 Experimental Set-up
The experimental set-up is illustrated in Figure 4.
The user interaction with the virtual mock-up using
the camera-based mocap system. Global force
feedback is provided using the SPIDAR system.
Local (grasp) feedback is achieved using the prop.
Figure 4: Illustration of a user performing the task.
4.2 Procedure
Twelve volunteer students participated in the
experiment. They were naives in the use of virtual
reality technique. Each participant had to perform the
maintenance task in the following conditions:
- C1: no additional feedback (only graphics);
- C2: additional visual feedback (colour);
- C3: haptic feedback (from SPIDAR).
The task has to be repeated three times for each
condition. Conditions were presented in different
order to avoid any training transfer. Participants were
in front of a large rear-projected screen at a distance
of approximately 1.5 meter. They worn a 5DT data
glove equipped with three reflective balls (Figure 2).
In order to get acquainted with the system each
participant performed a pre-trial of the task in C1
condition.
4.3 Data Collection
The following data were collected during the
experiment for each single trial:
- task completion time
- number of collisions
4.4 Results
Results were analysed through ANOVA. We
examine the effect sensory feedback on (a) task
completion time and (b) collision time. Then, we
look into the learning process associated with the
different sensory feedback.
4.4.1 Task Completion Time
Results, illustrated in Figure 5, revealed that sensory
feedback has a significant effect on task completion
time: (F(2,11)=14.08; p<0.005). A statistical
difference between conditions C1, C2 and C3 was
observed. In C1 condition the average completion
time was 30.34 sec (STD = 3.1). Average completion
time was 26.45 sec (STD = 1.8) for C2 (additional
visual feedback) and 22.24 sec (STD = 3.4) for C3
(haptic feedback). Thus visual and haptic feedbacks
allow increasing performance, as compared with the
open-loop case (no additional feedback), by 12.8 %
and 16 % respectively. Haptic feedback increase
performance by 15.6 % as compared to additional
visual feedback. However, participants’ performance
was more disparate.
Figure 5: Completion time versus conditions.
4.4.2 Number of Collisions
Results, illustrated in Figure 6, revealed that sensory
feedback has a significant effect on the number of
collisions: (F(2,11)=63.70; p < 0.005). As previously,
a statistical difference between C1, C2 and C3
conditions was observed. In C1 the average number
of collisions was 6.64 (STD = 0.58). The average
number of collisions was 4.83 sec (STD = 0.15) for
C2 and 4.05 (STD = 0.8) for C3. Thus visual and
haptic feedbacks led to a significant reduction of the
number of collisions as compared to the open-loop
case, by 27.3 % and 39.0 % respectively. Haptic
feedback increase performance by 16.2 % as
compared with additional visual feedback. As for
task completion time, participants’ performance was
more disparate in condition C3.
Figure 6: Number of collisions versus conditions.
LARGE-SCALE DEXTEROUS HAPTIC INTERACTION WITH VIRTUAL MOCK-UPS - Methodology and Human
Performance
455
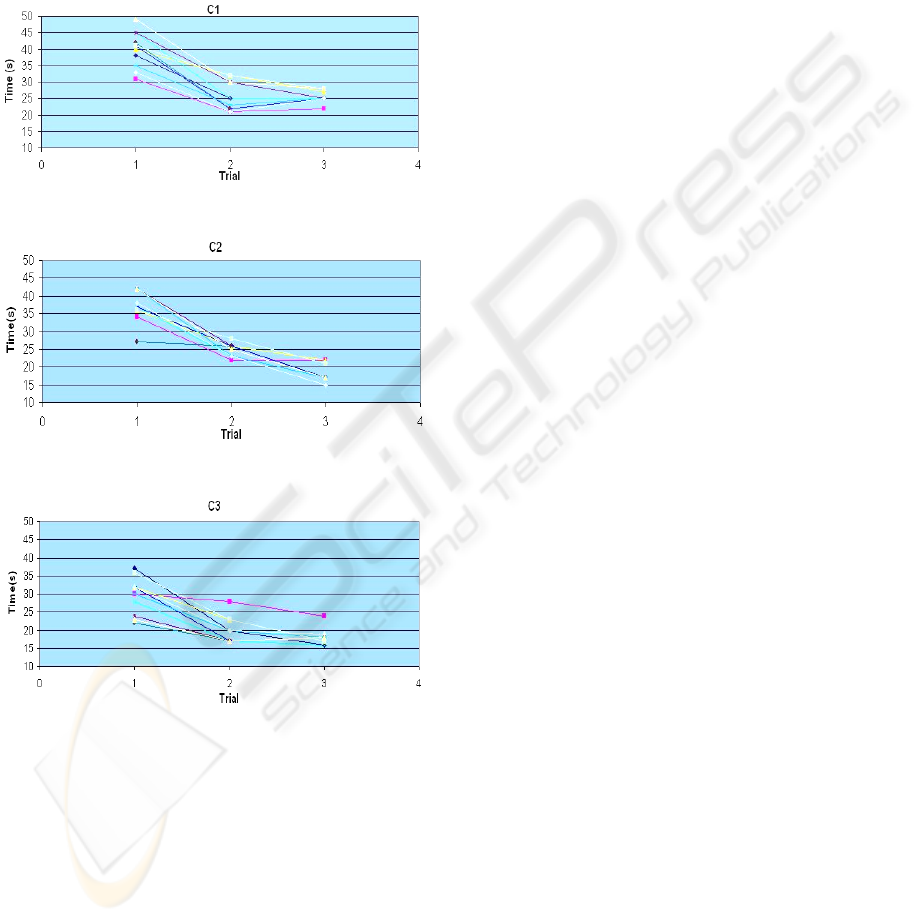
4.4.3 Learning Process
The learning process is defined here by the
improvement of participant performance associated
with task repetitions. We analysed the learning
process associated with both task completion time
and number of collisions. Although each participant
repeated the task three times only, a learning process
was observed for all conditions (Figure 7, 8, and 9).
Figure 7: Learning process associated with condition 1.
Figure 8: Learning process associated with condition 2.
Figure 9: Learning process associated with condition 3.
Average task completion time was 40.2 sec at the
first trial and 25.4 sec at the last trial for condition
C1, 36.7 sec at the first trial and 18.1 sec at the last
trial for condition C2, and 29.2 sec at the first trial
and 17.9 sec at the last trial for condition C3. This
results in a performance improvement of about 37%,
50%, and 48% for conditions C1, C2 and C3
respectively.
Concerning the number of collisions, we
observed a poor learning process for each condition.
This result is not very surprising for C1 condition
since no feedback was displayed for collisions. In the
C3 condition, participants were good at the first trial.
This shows that the haptic interface is user-friendly
and efficient. The poor learning process associated
with C2 condition may be explained by the lack of
spatial information as is it the case with force
feedback (sensation of force direction during
collision).
5 CONCLUSIONS
This paper presented a methodology for both the
integration and dexterous manipulation of CAD
models with biomechanical model in a physical-
based virtual reality simulation. The user interacts
with a virtual car mock-up using a string-based
haptic interface that provides force sensation in a
large workspace. Twelve participants were instructed
to remove a lamp of the virtual mock-up under
different conditions. Results revealed that haptic
feedback was better than additional visual feedback
to reduce both task completion time and collision
frequency. In the near future we plan to integrate
haptic guides in order to assist the users to reach and
grasp the cars lamps in a more efficient way.
REFERENCES
Ishii M., Sato M., 1994. A 3d Spacial interface Device
using Tensed Strings. Presence, 3(1).
Chamaret D. Richard P. Ferrier J.L., 2008. From CAD
Model to Human-Scale Multimodal Interation with
Virtual Mockup: An Automotive Application. 5
th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO 2008) Madeira,
Portugal.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
456
