
INDOOR WIRELESS LOCALISATION NETWORK USING A
DYNAMIC POSITION TRACKING MODEL
Montserrat Ros, Joshua Boom
School of Electrical, Computer and Telecommunications Engineering, University of Wollongong, Wollongong, Australia
Matthew D’Souza
Autonomous Systems Laboratory, CSIRO ICT Centre, Brisbane, Australia
Keywords: Wireless Sensor Network, Localisation, Zigbee, Propagation Channel Modelling.
Abstract: There has been great interest in using position location systems for indoor environments. Indoor
environments present many challenges to using wireless localisation systems, due to the interference caused
by metal beams and walls present. Current position localisation systems use wireless channel propagation
characteristics, such as receive signal strength to localise a user’s position. We present an inexpensive and
robust wireless localisation network that can track the location of users in an indoor environment. Our
localisation network uses a dynamic position tracking model to improve the real-time tracking of mobile
nodes. The localisation network uses the Zigbee/802.15.4 wireless communications protocol. Reference
nodes are placed at known positions in a building. The reference nodes are used by mobile nodes, carried by
users to localise their position. Further work involves improving the dynamic position tracking model by
incorporating the use of motion sensors to aid tracking and to investigate how large numbers of active users
can be supported.
1 INTRODUCTION
The widespread usage of position localisation
systems such as Global Positioning (GPS) has lead
to a variety of location based services applications
such as street map guide or asset tracking. Recently
there has been great interest in position locating for
indoor navigation applications. Indoor environments
tend to cause interference for wireless devices due to
the presence of obstacles such as metal beams or
walls. This causes outdoor localisation technologies
such as GPS to not function indoors. A variety of
radio frequency localisation techniques have been
developed such as Received Signal Strength or Time
of Arrival. An example is the cellular phone network
towers used by the GSM communications network
(Otsason et al., 2005) for indoor positioning. The
received signal strength indicator allows most RF
wireless transceivers to be used as localisers.
Our paper presents a wireless localisation
network that tracks the position of users in an indoor
environment. Our localisation network was designed
to track the position of users, in particular visually
impaired people, within a building. A user carries a
mobile node that tracks their current position. The
mobile node allows the user to approximate view
their location. The localisation network consists of
reference nodes placed at predetermined coordinates
in a building level. The reference nodes are used to
determine the coordinates of the user within the
region covered by the localisation network.
Using received signal strength or other wireless
channel propagation properties may not be suitable
for tracking users in real-time due to the lengthy
time taken to accurately measure channel
propagation parameters. This paper also looks at
using a motion odometry model for tracking people
with in a building. Odometry information includes
directional-heading and speed which can be used to
predict the next position of user.
The ZigBee/802.15.4 wireless communications
protocol is used by the localisation network. Zigbee
is a low data rate wireless communications protocol
that can operate on devices with limited computing
or power resources and cater for large networks of
active devices (ZigBee Alliance, 2006).
21
Ros M., Boom J. and D’Souza M. (2009).
INDOOR WIRELESS LOCALISATION NETWORK USING A DYNAMIC POSITION TRACKING MODEL.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 21-26
DOI: 10.5220/0002226200210026
Copyright
c
SciTePress
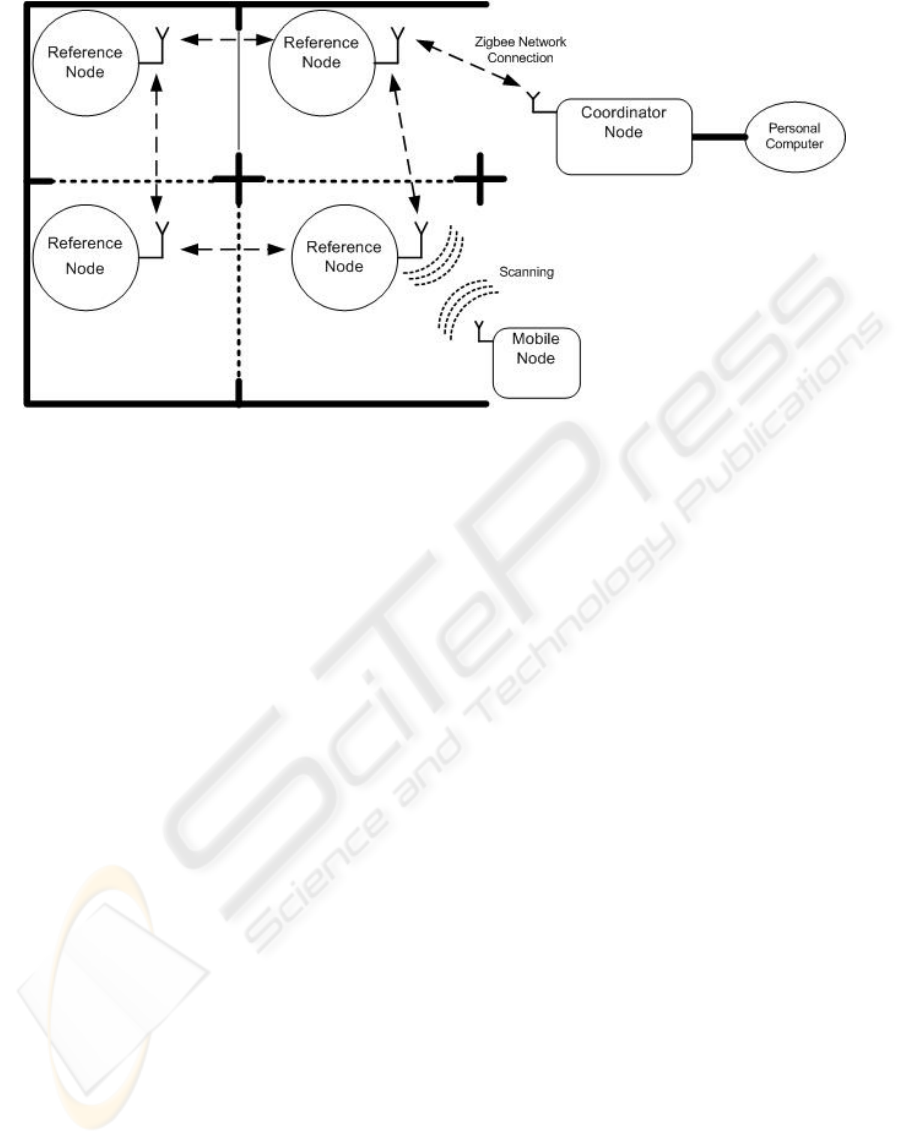
Figure 1: Localisation Network Overview.
The contributions of this paper can be
summarised as:
• Deployment of a sensor network for indoor
localisation and tracking.
• Analysis of a wireless channel propagation
model for indoor environments.
• Development and testing of a dynamic position
tracking model.
This paper is organised into 5 sections. Section 2
presents a review of related work. Section 3 discuss
the localisation network implementation. Section 4
presents the findings of testing conducted on the
localisation network. Conclusions and futher areas
of investigation are discussed in Section 5.
2 RELATED WORK
Different types of wireless technologies, such as
GPS have been investigated for outdoor and indoor
location systems. Unfortunately, GPS is not suitable
for indoor use and this has led to research into the
use of other wireless technologies including UWB
(Schwarz et al., 2005), ultrasonic and GSM (Otsason
et al., 2005) platforms. Regulations are not clear for
the use of UWB, and ultrasonic location detection
still requires RF transceivers. GSM uses existing
infrastructure, however accurate position resolution
indoors is difficult.
Lamarca et al (Hightower et al., 2006, LaMarca
et al., 2005) describe the Placelab geophysical
location system which users can determine their
position in an urban environment. Placelab uses the
Received Signal Strength Indicators (RSSI) from
Wireless LAN hotspots and GSM broadcast towers
to determine a user's position. The Placelab software
uses a database of known wireless LAN hotspots
and GSM broadcast towers. The Placelab software
can be used with a PDA or laptop with wireless
LAN or GSM connectivity. Localisation accuracy is
stated as being less then GPS, with 20-25m using
wireless LAN and 100 to 150m for GSM broadcast
towers. A similar technique of using RSSI is
employed by the reference node network.
Klingbeil and Wark (Klingbeil and Wark, 2008)
developed a wireless sensor network for monitoring
human motion and position in an indoor
environment. Mobile nodes with inertial and heading
sensors were worn by a person inside a building. A
Monte Carlo based localisation algorithm that used a
person’s heading, indoor map information and static
node positions was developed and tested.
3 LOCALISATION NETWORK
The localisation network as seen in Figure 1 consists
of three different nodes, coordinator, reference and
mobile. Mobile nodes are carried by users to
determine their current location. The reference nodes
are used to determine a mobile node’s position via
trilateration. The coordinator node displays the
current position of the mobile nodes in use, on a
building floor-plan.
WINSYS 2009 - International Conference on Wireless Information Networks and Systems
22

Figure 2: Mobile Node Position Localising Process.
3.1 Coordinator Node
The coordinator node tracks the location coordinates
of each mobile node. The coordinator node
communicates with the mobile node via the Zigbee
mesh routing connection using the reference nodes.
The coordinator is accessed by the Z-Location
graphical user interface (Texas Instruments). It
displays the current locations of users on a building
floor-plan. The coordinator node was implemented
using a CC2430 Zigbee/802.15.4 module on a
SmartRF development board, (Texas Instruments).
The coordinator node is connected via a serial
connection to a Personal Computer and is also
powered by standard mains electricity.
3.2 Reference Node
Each reference node communicates to the
coordinator node via a Zigbee network connection.
The position of each reference node has to be
initialised by the coordinator node. The reference
nodes are used by the mobile nodes for triangulation.
The reference node was implemented using the
CC2430 Zigbee/802.15.4 wireless transceiver
module from Texas Instruments (Texas
Instruments). Each CC2430 module has a unique 64-
bit network address which is used as the reference
node’s identifier. The reference nodes are powered
by rechargeable batteries.
3.3 Mobile Node
The function of the mobile node is to determine a
user’s position. The mobile node detects reference
nodes in near proximity, to determine a current
user’s position. The mobile node uses the RSSI
values of nearby reference nodes to calculate its
position. More details are given in Section 3.4. The
mobile node was implemented using the CC2431
Zigbee/802.15.4 Location Engine Module from
Texas Instruments (Texas Instruments).
3.4 Position Localisation
As mentioned earlier, the mobile node uses the
coordinates of nearby reference nodes and RSSI
values to localise the user’s current position. Figure
2 shows the process in which the mobile nodes
interact with the reference nodes. The mobile node
periodically transmits “RSSI Measure” messages to
all reference nodes within range (Figure 2a). The
reference nodes use the RSSI Measure messages to
estimate the received signal strength. Typically 5
messages are needed to calculate an averaged RSSI
value. As seen in Figure 2b, once a cycle of RSSI
Measure messages has been transmitted, the mobile
node will then broadcast an “RSSI and Position
request” message to all reference nodes in range.
Each reference node will then respond with its
calculated RSSI value and coordinates.
The RSSI value from the reference node is used
to calculate the distance between the mobile and
reference nodes using the channel propagation
equation as shown in equation (1).
(
)
nARSSI
d
−
= 10
(1)
Where:
• RSSI = Received Signal Strength Indicator of
Reference Node (dBm),
• d = Separation Distance between Reference and
Mobile Nodes ,
• n = the pathloss coefficient of the channel,
• A = Absolute Power received at a distance of 1m
from the transmitter (dBm) ,
Once the separation distances between all
detected reference nodes and the mobile node has
been calculated, a trilateration algorithm (Texas
Instruments) is used to compute the position of the
mobile node. The trilateration algorithm uses each
reference node’s coordinates and separation
distance. The mobile node’s CC2431 Zigbee
transceiver has an onboard location engine module
that computes the position when given the RSSI and
coordinates of detected reference nodes (Texas
Instruments). The CC2431 Zigbee transceiver has
special registers that allow the propagation channel
model to be configured (Texas Instruments).
INDOOR WIRELESS LOCALISATION NETWORK USING A DYNAMIC POSITION TRACKING MODEL
23

Figure 3: Test Deployment of Localisation Network.
3.5 Dynamic Position Tracking
One of the key aims of the localisation network is to
track a person in real-time. One of the drawbacks of
using RSSI as a localisation mechanism is that the
receive signal strength must be averaged over a
period of time. Averaged RSSI values are needed to
provide suitable accuracy. However lengthy
averaging periods can lead to localisation
inaccuracies. For example a moving mobile node
will distort the average received signal strength
values calculated by reference nodes.
One way to improve the accuracy of real-time
tracking is to use other odometry information such
as a person’s directional-heading and speed to
predict the next position of user. Odometry motion
models have been used for localisation tracking by
Klingbeil et al, (Klingbeil and Wark, 2008) and E.
Lau et al (Lau and Chung, 2007). We implemented
the Dynamic Position Tracking model used in (Lau
and Chung, 2007), to localise a person’s position.
The dynamic position tracking model used the speed
and current position to predict the person’s next
position. The dynamic position tracking model was
implemented using the following equations of
motion:
ˆ
R
est(i)
=
ˆ
R
pred(i)
+ a(
ˆ
R
prev(i)
−
ˆ
R
pred(i)
)
(2)
)
ˆˆ
(
ˆˆ
)()()()( ipredipreviprediest
RR
T
b
VV −+=
(3)
ˆ
R
pred(i+1)
=
ˆ
R
est(i)
+
ˆ
V
est(i)
T
s
(4)
)()(
ˆˆ
iestipred
VV = (5)
Where:
ˆ
R
est(i)
= The ith estimated Range,
ˆ
R
pred(i)
= The ith predicted Range,
ˆ
R
prev(i)
= The ith measured Range,
ˆ
V
est(i)
= The ith estimated Velocity,
ˆ
V
pred(i)
= The ith predicted Velocity,
a, b = Gain Constants,
T
s
= Time Update Period
Equation (5) is an iterative process, which uses
Equation (3) to adjust the position calculated by the
mobile node until the position error has been
sufficiently reduced. The speed value was initially
WINSYS 2009 - International Conference on Wireless Information Networks and Systems
24

set to the average human walking speed of 1.3m/s
(Murray et al., 1964) for Equation (4). The next
section will examine the accuracy of the dynamic
position tracking model. A prototype of the dynamic
position tracking model was implemented on the
Personal Computer connected to the Coordinator
node. The current prototype of the dynamic position
tracking model does not yet perform tracking in real-
time. However we intend to incorporate the model
into the coordinator node’s graphical user interface
as part of our ongoing future work.
4 EVALUATION
An initial trial of the localisation network used six
reference nodes, a mobile and coordinator nodes.
The localisation network was deployed in a building
floor corridor and covered a space of 72m
2
. The aim
of the trial was to evaluate the channel propagation
and the dynamic position tracking accuracy. The test
deployment can be seen in Figure 3.
4.1 Channel Propagation Estimation
We estimated the channel propagation parameters
for Equation (1): pathloss coefficient (n) and
absolute transmitted power (A), by conducing range
tests. This involved moving the mobile node in a
straight direction-heading from a reference node. At
specific separation distances, the RSSI was
measured and recorded. Maximum range testing of
the mobile node showed that it had a range of at
least 20m indoors.
Using the measured RSSI values and calculated
positions, we were able to estimate suitable values
for n and A. We found that that n=3.375 and A=40
from the linear relationship between the RSSI and
separation distance. Our testing also showed that the
Figure 4: Distance vs Time with a Constant Velocity.
channel propagation parameters are dependent on
the surrounding indoor environment and the
positions of the reference nodes. Walls and other
metal fittings will cause multipath fading to occur.
Incorrect calibration of n and A values will cause
large errors in estimating position.
4.2 Dynamic Position Accuracy
We conducted a series of experiments to test the
accuracy of the dynamic position tracking model
used by the localisation network. The first
experiment involved moving the mobile node in a
straight line in the test deployment area at a constant
walking speed. Figure 4 shows the actual, measured
and estimated travelled distances of the mobile over
time. The distance is the displacement of the mobile
node from a starting point. The measure distances
are calculated directly from the mobile node’s
coordinates (using RSSI) and the estimated distance
is computed by using the dynamic position tracking
model. The maximum error in position is 75% using
the mobile node’s coordinates. Using the dynamic
tracking model, the maximum position error was
55%. Using the dynamic position tracking model
produced a smaller error in the position estimation
the mobile node.
The second experiment was similar to the first
experiment except that a delay of 15s was
introduced midway during the test. This was done to
test how the localisation network responds to
changes in movement. Figures 4 & 5 show the
actual, measured and estimated distances with
constant velocity and changing velocity.
Two estimated distances were calculated by
varying the gain constants: a and b, in dynamic
position tracking equations’ (1) and (3). As seen in
Figure 5, the dynamic tracking model is better at
tracking the position of the mobile node than by only
relying on the mobile node’s coordinates. Also
Figure 5: Distance vs Time with a Changing Velocity.
INDOOR WIRELESS LOCALISATION NETWORK USING A DYNAMIC POSITION TRACKING MODEL
25

is the large position inaccuracy (50%), if the gain
constants a and b are not calibrated correctly. Using
a=0/06 and b=0.01 was found to produce the best
results.
5 CONCLUSIONS AND FURTHER
WORK
In this paper we presented a localisation network
system that tracked users in an indoor environment.
The localisation network consisted of reference
nodes placed at known positions throughout a
building. A user carried mobile node that tracked
their current position.
A dynamic position tracking model for real-time
tracking of users was also developed. We found that
using received signal strength or other wireless
channel propagation properties was not suitable for
tracking users in real-time due to the lengthy time
required to sample the channel propagation
parameters.
An initial trial of the localisation network was
conducted using six reference nodes, a mobile and
coordinator nodes. We deployed the localisation
network along a building floor corridor and covered
a space of 72m
2
. We measured the channel
propagation parameters and the dynamic position
tracking model accuracy. We found that by using the
dynamic position tracking model, the maximum
error in position location was reduced from 75% to
50%.
Further work involves developing a multi-
hypothesis testing model to accurately predict and
track user position. We will also look at
incorporating human motion sensors such as
accelerometers to accurately determine walking
speed. We will also be looking at a larger scale
deployment over multiple building levels and
investigating how the network’s capacity to facilitate
large numbers of active users.
ACKNOWLEDGEMENTS
The authors acknowledge the support provided to
this project by the Urban Interfaces Project,
Australasian CRC for Interaction Design (ACID).
REFERENCES
Hightower, J., LaMarca, A. & Smith, I. E. (2006) Practical
Lessons from Place Lab. Pervasive Computing, IEEE,
5, 32-39.
Klingbeil, L. & Wark, T. (2008) A Wireless Sensor
Network for Real-Time Indoor Localisation and
Motion Monitoring. Proceedings of the 7th
international conference on Information processing in
sensor networks. IEEE Computer Society.
LaMarca, A., Chawathe, Y., Consolvo, S., Hightower, J.,
Smith, I., Scott, J., Sohn, T., Howard, J., Hughes, J.,
Potter, F., Tabert, J., Powledge, P., Borriello, G. &
Schilit, B. (2005) Place Lab: device positioning using
radio beacons in the wild. Pervasive Computing. Third
International Conference, PERVASIVE 2005.
Proceedings (Lecture Notes in Computer Science Vol.
3468). Springer-Verlag. 2005, 116-33.
Lau, E.-E.-L. & Chung, W.-Y. (2007) Enhanced RSSI-
Based Real-Time User Location Tracking System for
Indoor and Outdoor Environments. Convergence
Information Technology, 2007. International
Conference on.
Murray, M. P., Drought, A. B. & Kory, R. C. (1964)
Walking Patterns of Normal Men. J Bone Joint Surg
Am, 46, 335-360.
Otsason, V., Varshavsky, A., LaMarca, A. & de Lara, E.
(2005) Accurate GSM indoor localization. UbiComp
2005: Ubiquitous Computing 7th International
Conference, UbiComp 2005. Proceedings (Lecture
Notes in Computer Science Vol. 3660) . Springer-
Verlag. 2005, 141-58.
Schwarz, V., Huber, A. & Tuchler, M. (2005) Accuracy of
a commercial UWB 3D location/tracking system and
its impact on LT application scenarios.
Texas Instruments CC2430 System-on-Chip Solution for
2.4 GHz IEEE 802.15.4 / ZigBee™, accessed 2009,
http://focus.ti.com/docs/prod/folders/print/cc2430.html.
Texas Instruments CC2431 ZigBee Development Kit,
accessed 2009, http://focus.ti.com/docs/toolsw/folders/
print/cc2431zdk.html.
Texas Instruments CC2431System-on-Chip (SoC) Solution
for ZigBee/IEEE 802.15.4 Wireless Sensor Network,
http://focus.ti.com/docs/prod/folders/print/cc2431.html.
ZigBee Alliance (2006) ZigBee Specification,
http://www.zigbee.org/en/spec_download/.
WINSYS 2009 - International Conference on Wireless Information Networks and Systems
26
