
A SYSTEM-ARCHITECTURE FOR ROBOTIC
MOVEMENTS OF GOODS
Approaches Towards a Cognitive Material Flow System
Dennis Ommen, Carsten Beth, Jens Kamenik
OFFIS Institute for Information Technology, Escherweg 2, Oldenburg, Germany
Axel Hahn
Department of Computing Science, Carl von Ossietzky University, Ammerl
¨
ander Heerstrasse 114-118, Oldenburg, Germany
Keywords:
Network Robotics, Mobile Robots and Autonomous Systems, Robot Design, Development and Control, Intel-
ligent transportation technologies and systems.
Abstract:
Flexibility, throughput, maintainability, scalability, reliability and low cost: That are the main optimization
criteria of material flow systems (MFS). The most of this criteria are diametrical and so hardly to improve
considerably with today’s existing transportation devices and their static control structures. Hence a new
approach of a transportation systems with cooperating robotic units and a novel cognitive environment will be
presented. This approach will combine different research areas like robotics and wireless sensor networks to
achieve a higher degree of flexibility.
1 INTRODUCTION
This paper will discuss aspects that will lead to a
novel, cognitive material flow system (MFS). These
aspects are: modularity, energy consumption, dy-
namic sensor integration, and computational architec-
ture.
A few years ago carrying speed and throughput
were the main performance metrics in MFSs. In the
future properties like flexibility, modularity, reconfig-
urability and redundancy will play a decisive role.
Reasons are the growing number of different prod-
ucts and product variants and thereon shorter product
life-cycle and the growing complexity of products and
processes. At the same time the product quality shall
by high, the price low and the delivery time short. The
movements of goods in a transfer station thus have to
be organized in a flexible manner to fulfill these partly
conflicting requirements with minimal stock of inven-
tory.
Nowadays it isn’t possible anymore to build a
MFS for a transfer station which will last for 10 years
or longer without being rebuilt substantially. In the
future a MFS has to be reconfigurable by design, it
must be possible to change the layout with a small
amount of time and cost to be able to react on chang-
ing requirements (Windth, 2006). The static control
structure of former systems has proved to be too in-
flexible. Therefore a new dynamic control approach
an a new robotic system is needed to overcome these
issues.
To build such new systems it has to be investi-
gated (1) how to modularize the transportation system
and how to identify the modules of single transporta-
tion unit (horizontal/vertical actuators, energy supply,
controller, communication, etc.), (2) how these mod-
ules can be enabled to automatically acting as sin-
gle transportation units, (3) how the different trans-
portation units can cooperate with each other by using
agent-based technologies to achieve a common pur-
pose, (4) how to integrate all the necessary sensor in-
formation into a cognitive environment.
Paper Organization. The remainder of the paper is
organized as follows: Section 2 introduces the new
approach of a cognitive MFS. Section 3 discusses the
related work and will show a research trend. Sec-
tion 4 presents the cognitive MFS approach. The sec-
tions 5 and 6 highlights the systems requirements and
also approaches towards a cognitive MFS. Section 7
presents concluding remarks.
342
Ommen D., Beth C., Kamenik J. and Hahn A.
A SYSTEM-ARCHITECTURE FOR ROBOTIC MOVEMENTS OF GOODS - Approaches Towards a Cognitive Material Flow System.
DOI: 10.5220/0002249303420347
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-674-000-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 APPROACH
A cognitive MFS is characterized by (1) strict modu-
larization where all modules are able to take individ-
ual, autonomous decisions of there acting, (2) coop-
eration of the modules in order to form a larger en-
tity and/or to perform tasks collectively, (3) the in-
corporation of the environment in form of intelligent
sensors, (4) dynamic reconfigurability of the system
through adding, removing or rearrangement of mod-
ules, (5) goods accompanied by intelligent SW com-
ponents cooperating with the before-mentioned enti-
ties in order to reach their destination.
The approach of decentralized cooperating au-
tonomous logistic units, where goods and the trans-
portation system autonomously make decisions, can
be a way to realize the requirements drafted above
(Scholz-Reiter et al., 2007b), (Scholz-Reiter et al.,
2007a). Regarding where the decision is taken, the
approaches can be separated into two clusters (1)
good driven (Scholz-Reiter et al., 2006), (Scholz-
Reiter et al., 2007a): An embedded device attached to
the package escorts the goods to its destination. Dur-
ing the transportation process the embedded device
cooperates with the environment to achieve its goal.
(2) Transportation system driven: The environment
around the goods takes the decisions. Here a possible
process looks like that: With the arrival and identi-
fication of a good at the entry gate the environment
creates autonomously the specific transport order that
from now on escorts each autonomous transportation
unit that handles these goods.
These autonomous transportation units are able to
make their own decisions and to cooperate with each
other. They can decide which transportation order
they accept and how to deliver the good to the de-
sired sink. Furthermore they achieve a high degree
of freedom through the ability of cooperation with
other units. To raises the degree of flexibility even
more the transportation units consists of 1...n inter-
changeable modules. These modules are pluggable
in vertical and horizontal direction to build an unique
transportation unit. The abilities that these unique
transportation unit now has, is derived from the cur-
rently used modules (G
¨
unthner et al., 2008b). The
control paradigm of smart independent, autonomous
transportation units shall lead to positive emergence
with the promise to cope with the high dynamic of
logistic systems (Windth, 2006). The main goals of
such distributed systems are increased flexibility, car-
rying speed and throughput, increased maintainabil-
ity, scalability and reliability through redundancy and
decreased livecycle cost.
3 RELATED WORK
This section will provide an overview of the state of
the art of robotic MFSs. It will not only focus on sys-
tems that are available on the free market but also on
the current research. This paper will separate these
products/projects into the following three categories:
(1) central control and autonomous behavior: These
MFSs are controlled via a central instance, where all
the decisions regarding the transportations order are
scheduled. These robotic systems are usually appli-
cation specific and, hence there is no need for coop-
eration between the robots to fullfill a goal. (2) lo-
cal control with autonomous behavior: Because of lo-
cal control the presented system are scalable, flexible
and failsafe. Thereon, the installation and reconfigu-
ration costs are lower in comparison to central con-
trolled systems. The robots act autonomously and
don’t cooperate. (3) local control with swarm be-
havior: robots cooperate with each other to achieve
a common goal. This requires the ability to commu-
nicate with each other and to make local decisions.
Central Control with Autonomous Behaviour.
The Kiva warehouse management system by Kiva
Systems (Guizzo, 2008), (Wurman et al., 2008) is a
commercial system for commissioning of products in
stocks with small parts. The stock consists of many
adjustable shelves with a matrix like structure on a
flat ground. Small autonomous robots (Drive Units,
DU) are able to drive under a shelf, lift it up and
bring it autonomously to other locations, e.g. a pick-
ing station. Orders are accepted from a warehouse
management system by a central computer (Job Man-
ager, JM) which is responsible to schedule the DUs
and picking stations as well as the shelf space at
the station. After receiving a transportation request
from the JM the DUs are responsible for their own
task planning, path planning plus motions planning
and control. Communication between the agents is
done with XML messages at the higher level trans-
mitted by wireless technologies. Because of the agent
based architecture the system is highly scalable and
can grow with the requirements, where the central-
ized Job Manager is a limiting part. A disadvantage is
the limited field of application domains. The system
is mainly useful for order picking processes that have
a high degree on manual work.
Local Control with Autonomous Behaviour. Mul-
tishuttle is a product by Siemens Dematic AG devel-
oped together with Fraunhofer-Institute for Material
Flow and Logistics in Dortmund,Germany. The mod-
ular system consists of autonomous vehicles driving
A SYSTEM-ARCHITECTURE FOR ROBOTIC MOVEMENTS OF GOODS - Approaches Towards a Cognitive Material
Flow System
343

rail-bounded inside of a warehouse system. The vehi-
cles can drive at the horizontal direction and they can
autonomously load and unload product carrier (at the
same time). Rails are laid in several stacked levels.
They take care for both - guiding the vehicles and en-
ergy delivery. Movement at the vertical direction is
done by lifts. Transport orders are communicated to
the vehicles by WLAN. The rail-bound energy deliv-
ery leads to a lower weight and price. But for the same
reason the vehicles are bound to the warehouse, they
can’t deliver goods in the total area of the delivery sta-
tion. In contrast to traditional warehouse systems like
a shelf access equipment, the Multishuttle system is
scalable. Thereon, the throughput be increased with
some additional vehicles.
The system Servus form the Austrian company
Servus Robotics (Servus Robotics, 2006), (Robotics,
2005) is intended for intra-logistics assembly automa-
tion. Like Multishuttle the system is rail bounded.
The vehicles are able to act autonomously. They
accept transportation orders through an infrared or
WLAN interface. Additional information of the
goods, like necessary processing steps, is stored at the
vehicle. The goods themselves don’t need to be intel-
ligent. Additional actuators can be build upon the ve-
hicles, e.g. to be able perform processing steps while
the goods are carried. Energy is not supplied by the
rail, unlike the Multishuttle, instead each vehicle has
its own fast rechargeable energy supply.
Local Control with Swarm Behaviour. Another
project investigating in robotic conveyers is the
KARIS project of the Institute for Conveying Tech-
nology and Logistics (IFL) at the University of Karl-
sruhe, Gemany. They have presented a robotic trans-
portation system (Baur et al., 2008), that consists of
several homogeneous transportation units which are
able to drive at the floor or stand at the floor while
acting as a conveyer. The wheels thereby are turnable
at 360 degrees providing free movement at the hori-
zontal plane. A KARIS unit is able to carry payload
by its own or if the charge is too large or too heavy,
many KARIS units build a swarm and carry the pay-
load together. If a large throughput is required several
units can be combined to build a continuos conveyer
with sorter function. Swarm building and acting is the
actual research work at IFL.
The institute for Materials Handling, Material
Flow, Logistics (IML) in Munich (Gemany) pro-
posed a concept for future material handling systems
(G
¨
unthner et al., 2008b), (G
¨
unthner et al., 2008a) con-
sisting of low-scale autonomic transportation units.
All transportation vehicles are small and have a sim-
ple and basic design causing a low price because
of high volume production. For special roles they
shall be able to be equipped with manipulators like
a lift fork, roller or belt conveyer. They shall be au-
tonomous with their own intelligence and communi-
cation options. If a task can’t be achieved by a single
vehicle, more of them shall form a swarm and act to-
gether.
Figure 1: Trendline of robotic material flow systems.
Conclusion on the Related Work. As it is de-
picted in Figure 1 there is clear trend line towards au-
tonomous robotic systems that can act in a swarm to
achieve common goals in MFSs. The discussed re-
search projects KARIS is an elaborated robotic sys-
tem that shows that these systems can act in two
ways: as a discontinuous or continuous conveyer.
Nevertheless, this systems has no flexibility regard-
ing the transported goods. The concept of the IML
has this ability because of its changeable manipula-
tors. Thereon, it can pickup different kinds of goods,
like pallets and mixed cargo. But both approaches
are limited to operate on the floor. In the following
this paper will present an promising approach that self
adapts to the transported goods and the layout of the
transport area.
4 COGNITIVE MATERIAL FLOW
SYSTEMS
A transfer station scenario with cognitive transporta-
tion units (CTU) is drafted in figure 2. Here the sta-
tion consists of entrance and exit areas, a storing area
and a working area between the entrance and the exit.
Goods are delivered, e.g. by trucks at the ports of the
entrance area. On the other side goods are removed
at the ports of the exit area. The CTUs (red vehicles
in the picture) are responsible for good transportation
(goods are represented as pallets at the picture). Ac-
cording to the requirements CTUs can act as continu-
ous conveyors or discontinuous conveyors equipped
with different manipulation units depending on the
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
344
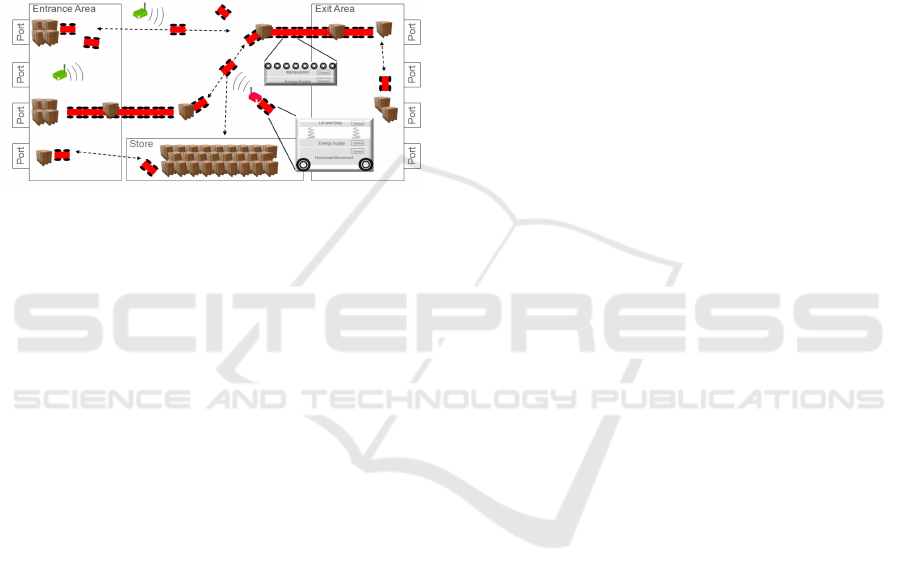
kind of goods. In general the CTUs are modular. Be-
cause of the unified model it is possible to combine
arbitrary modules in vertical and horizontal manner.
Communication between the CTUs and the environ-
mental sensors is done wireless. In figure 2 two types
of communicating sensors are shown. The red one is a
mobile sensor (CTU in its rule as a sensor); the green
one is a fixed location sensor. The shown scenario
raises some questions to the aspects of modularity,
energy supply, sensor data delivery, dynamic sensor
integration, and communication. These aspects are
highlighted in the following sections.
Figure 2: A cognitive material flow scenario.
5 COGNITIVE
TRANSPORTATION UNIT
Modularization. As it has been stated in the pre-
vious section the CTU consists of modules that have
different abilities. This key approach of modulariza-
tion gives cognitive MFSs the flexibility to adapt not
only to fluctuation in the load but also to adapt to
different kind of goods that need to be transported.
So needs a parcel an other manipulator as an mobile
shelve. The decomposition of the CTU leads to the
following kinds of modules: (1) A conveyer module
for fast transportation of goods in horizontal direc-
tion. If many of this modules stands next to each other
they can act like a continuous conveyer system. (2) an
elevating module, for movements in vertical direction
to lift or lowering goods. This module is needed, e.g.
to transport an mobile shelve or to compensate dif-
ference in the height during the pick up process of a
good. (3) A manipulator module can either work in
combination with the conveyer module or with the el-
evating module to grab or release a good. To be able
to handle different kind of goods, e.g. pallets or mo-
bile stock, there should also different kind of manip-
ulators. (4) A power supply unit, that energizes the
system. Like the other modules this is also designed-
for-purpose. So can the power supply unit be based on
batteries or can even be a stationary power supply to
support or load other CTUs. (5) The movement unit
allow the CTU to act as an discontinuous conveyer
system, with different kind of this modules the CTU
are able to drive on the floor and also to drive into a
stock.
Because the power supply is an mandatory on,
there are at least 20 CTU combinations possible,
which will leverage the MFS to respond in an even
more flexible way. The modules can either be stacked
vertical (on top of each other) , e.g. to build discon-
tinuous CTU (with modules (1)-(5) ) or horizontal to
build a continuous CTU with module type (1). There
should be no limitation regarding the used number
of modules to build an CTU. The modularization re-
quires new ways of communication, control and per-
ception between the CTU modules and then between
the CTUs themselves.
Towards a CTU System Architecture. The pre-
viously described modularization has also its impact
on the computational architecture of the CTU. Here
are different communication channels mandatory: (1)
The vertical channel handles the communication be-
tween the modules of the CTU. This communication
channel have hard criteria regarding the reliability of
data transmission and real-time requirements, e.g. be-
cause of used closed control loops that set the speed
of the CTU wheels. Thereon this channel is typically
wired and represented by a field bus with high band-
width, like CAN or Flexray. (2) A horizontal chan-
nel: This communication interface is used to interact
with (a) other CTUs and (b) the cognitive environ-
ment, which is discussed in detail in the next sec-
tion. A communication between the CTUs occurs,
when goods need to be transfered between them or
when transportation orders need to be negotiated or
for swarm cooperation. The channel (2) with its dif-
ferent interfaces is a wireless one, that has to ful-
fill special requirements regarding energy optimiza-
tion or real-time. Because of the numerous commu-
nication interfaces, that have divers API and physi-
cal characteristics, an abstraction layer is needed that
makes the communication to the CTU modules and
CTU itself transparent. This abstraction layer (mid-
dleware) has to support Quality of Service parameters
that specify the fault tolerance or real-time level of the
communication. Furthermore this Middleware has to
support different embedded devices, that are used in-
side the CTU modules or the sensors from the cogni-
tive environment. This can differ in used micropro-
cessor architecture, e.g. from 8-Bits to 32-Bits archi-
tectures and their program storage size (flash-size).
Energy Efficiency. As stated in (Overmeyer et al.,
2007) optimization under changing general condi-
A SYSTEM-ARCHITECTURE FOR ROBOTIC MOVEMENTS OF GOODS - Approaches Towards a Cognitive Material
Flow System
345

tions has still to be favorable for the overall logistic
system. A battery is a limiting factor for the time t
of useful work. The strategies the CTUs are using
to fulfill a task directly influence the energy drain of
the battery. For example, if the CTUs try to greed-
ily minimize the waiting time criterion in (Overmeyer
et al., 2007) they drive with the highest speed to the
nearest source, catch a palette and drive with highest
speed to the sink of the palette. If all CTUs choose
this egoistic strategy they start to block each other be-
cause the most efficient path from the source to the
sink is overused. At the end they may not be able
to fulfill the task at all because the strategy is to en-
ergy consuming for the whole system. For this kind
of system the optimization criteria has to be reformu-
lated in a way considering energy consumption. A
trade-off has to be found between the energy con-
sumption and the application needs. As an exam-
ple, for high prioritized costumers the focus lies on
speed and energy is less considered and for low pri-
ority costumers energy is considered more. For the
longest availability of the overall system a uniform
distribution of energy might be useful. But, this op-
timization may lead to the fact that all CTUs have to
recharge at the same time and the system is unavail-
able; an additional optimization criterion might then
be that the mean number of recharging CTUs is e.g.
not higher than 15% of all CTUs in the system. The
following assumptions are made: Batteries recharg-
ing takes a significant long time. During this period
the CTU is not able to do valuable work, e.g. it is
unavailable. Three states characterize the (simplified)
CTU: driving, turning and lifting. Every system state
has characteristic power consumption at a time t and
the overall system energy consumption at time t is:
E
AutSys
= E
Driving
(t) + E
Turning
(t) + E
Li f ting
(t) (1)
Additionally the power consumption depends on the
load (kg), the speed (
m
s
) and acceleration (
m
s
2
) of the
CTU. If the CTUs now receive a task they have to
(1) choose a strategy for the task and (2) estimate the
time they will spend in each system state, (3) calcu-
late the overall energy for the chosen strategy and (4)
compare the energy consumption with the given opti-
mization criterion - if this is violated go back to (1).
With this approach an energy optimized strategy for
logistic systems can be found.
6 COGNITIVE ENVIRONMENTS
The basic cognitive capabilities are perception, rea-
soning, learning and planning. A cognitive environ-
ment consists of systems that show a similar strate-
gic behavior like human individums do. For the mod-
elling of cognitive human processes, e.g. cognitive
systems, different architectures have been developed
(Laird et al., 1987) (Anderson and Lebiere, 1998). In
these architetures the perception (sensing) of the envi-
ronment and the storage (memory) of sensor data are
important basics for learning and reasoning. In for-
mer logistic systems like forklifts the only sensory in-
formation comes from the limited human perception.
The same problem have autonomous logistic systems
e.g. driver-less systems that rely on built-in sensor in-
formation. Their view of the environment is limited
to the perception ability of the integrated sensors.
Sensor Abstraction. In the proposed transfer sta-
tion scenario sensors are usable by everyone. This
expands the view of the environment to the whole
scenario. Every autonomous system is able to get
this view to raise the correctness of their decisions.
For example, in (Riedmaier, 2008) the only sensor in-
formation was the soil condition of the track. With
only this information the speed of forklifts could be
optimized and the handling of palettes could be in-
creased about 5%. In the proposed transfer station
scenario external sensors are attached to the walls able
to detect movement of non-cooperative and coopera-
tive systems. With the help of these sensors a CTU is
able to drive with high speed towards an intersection
where it otherwise would not be able to sense if an-
other robot is crossing it and, therfore had to reduce
the speed. To unify sensor communication wireless-
and wired communication media have to be integrated
into every sensor. So, every sensor can act as fixed ex-
ternal sensor or if necessary can be attached to an au-
tonomous robot to improve their sensing capabilities.
As the cognitive logistic system allows a task adapted
flexible restructuring, fixed sensors are a problem. To
allow flexibility, the CTUs are able to move the sen-
sors to a new position. From the modeling point of
view, sensors are agents running a sensing task for a
long time. In the restructuring process of the logistic
system they get a new task and autonomously decide
if they can fulfill this task (1) with their sensing ca-
pabilities and (2) at their actual position. If (1) is not
fulfilled they have to reject the task, if (2) is not ful-
filled they can require help from an autonomous robot
to replace them to a better position. Agents are the ab-
straction of the real embedded devices in the proposed
cognitive logistic system and consequentially sensors
are abstracted with agents as well - this unifies the
whole transfer station scenario world view. Further
usage of the network of sensors can be as a communi-
cation relay for the CTUs and sensors. Due to limited
propagation of radio waves in logistic in-door facili-
ties the assumption that all sensors can communicate
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
346

with each other is not true. Therefore, using the multi-
hop capability of modern wireless sensor networks is
a good way to extend the range of the sensors and the
CTU’s communication system.
Sensor Data Memory. Sensor data is important for
decision making of the control algorithms. There-
fore, it needs to be protected from communication
and sensor node failures. For industrial environments
WirelessHART (HART Communication Foundation,
2007) is a standardized protocol for reliable wireless
communication and can be used in the proposed trans-
fer station scenario. It provides robust self-organizing
and self healing mechanisms to encounter communi-
cation failures. But networked sensors have far more
potential, in a cognitive system they can be used as
distributed observers. A distributed observer is a sen-
sor with its own memory that stores a snapshot of
the past. It is similar to the human short-term mem-
ory (with low-capacity) and is used in many cognitive
modelling architectures (Laird et al., 1987) (Anderson
and Lebiere, 1998). This kind of sensors can answer
questions about situations of a larger context, which
is usful for coordination and optimization purposes.
Distributed sensors have an area to observe. For ex-
ample, a fixed sensor knows about the robot traffic in
his area and can therefore give a usage estimation of
the path belonging to his observation area. Techni-
cally, sensors now have to store their data instead of
just sending real-time data to the CTUs. The CTUs
then ask the sensors for certain events in their stored
history snapshot. For fault-tolerance reasons, sensors
are allowed to replicate their data to other fixed or mo-
bile sensors. They can use different replication strate-
gies to trade-off data availability for energy and vice
versa.
7 CONCLUSIONS AND FUTURE
WORK
Present state-of-the-art projects were considered as
too domain specific and not able to raise the flexibil-
ity of logistic systems comprehensively. Therefore,
this paper proposed modular principle that raises the
flexibility of the system. Energy is an important fac-
tor for battery driven autonomous robots, therefore
strategies for the trade-off between energy consump-
tion and timelines were discussed. Furthermore, a
unified sensor integration scheme was proposed that
raises the cognitive perception ability of the whole lo-
gistic system and a sensor data concept that enables
the idea of a distributed observer was shown. At the
moment the proposed models are being implemented
and in a next step they will be simulated. The goal
of the simulation is to find the best granularity of the
modularization and to find the best cooperating strate-
gies for autonomous logistic systems. As a next step
a test bed implementing figure 2 for validation of the
chosen strategies will be created.
REFERENCES
Anderson, J. R. and Lebiere, C. (1998). The Atomic Com-
ponents of Thought. Lea.
Baur, T., Sch
¨
onung, F., Stoll, T., and Furmans, K.
(2008). Formationsfahrt von mobilen, autonomen und
kooperierenden Materialflusselementen zum Trans-
port eines Ladungstr
¨
agers. Fachkolloquium der Wis-
senschaftlichen Gesellschaft f
¨
ur Technische Logistik e.
V., 4.
Guizzo, E. (2008). Three engineers, hundreds of robots, one
warehouse. IEEE Spectrum:, pages 26–34.
G
¨
unthner et al. (2008a). Vom Prozess zum Ereignis - ein
neuer Denkansatz in der Logistik. In Jahrbuch Logis-
tik, pages 224–228.
G
¨
unthner, W. A., Durchholz, J., Kraul, R., and Schnei-
der, O. (2008b). Technologie f
¨
ur die Logistik des 21.
Jahrhunderts. In Kongressband zum 25. Deutschen
Logistik-Kongress, pages 360–393.
HART Communication Foundation (2007). WirelessHART
Technical Datasheet. HART Communication Founda-
tion, 1.0b edition.
Laird, J. E., Newell, A., and Rosenbloom, P. S. (1987).
Soar: An architecture for general intelligence. Artif.
Intell., 33(1):1–64.
Overmeyer, L., Falkenberg, S., Heiserich, G., and Jungk, A.
(2007). Innovative Gestaltung von Intralogistik durch
Kopplung kleinskaliger Systeme. In 16. Deutscher
Materialfluss-Kongress, pages 171–179.
Riedmaier, S. (2008). Neue M
¨
oglichkeiten f
¨
ur Schmal-
gangstapler. Hebezeuge F
¨
ordermittel, 12:762–763.
Robotics, S. (2005). Na, Servus! Automation, 6.
Scholz-Reiter, B., Jagalski, T., and Bendul, J. (2007a).
Bienenalgorithmen zur Selbststeuerung logistischer
Prozesse. Industrie Management, pages 7–10.
Scholz-Reiter, B., Jagalski, T., and de Beer, C. (2007b).
Selbststeuerung logistischer Prozesse in Produktion-
snetzen. Industrie Management, pages 19–22.
Scholz-Reiter, B., Rekersbrink, H., and Freitag, M. (2006).
Kooperierende Routingprotokolle zur Selbssteuerung
von Transportprozessen. Industrie Management, 22.
Servus Robotics (2006). Wie von Geisterhand. Automation,
4.
Windth, K. (2006). Selbststeuerung intelligenter Objekte in
der Logistik.
Wurman, P. R., R., R. D., and Mountz, M. (2008). Coordi-
nating hundreds of cooperative, autonomous vehicles
in warehouses. AI Magazine, 29/1:9–19.
A SYSTEM-ARCHITECTURE FOR ROBOTIC MOVEMENTS OF GOODS - Approaches Towards a Cognitive Material
Flow System
347
