
Output Feedback Control for a Class of Nonlinear
Delayed Systems
Estelle Cherrier
1
, Tarek Ahmed-Ali
1
, Mondher Farza
1
, Mohammed M’Saad
1
and Franc¸oise Lamnabhi-Lagarrigue
2
1
GREYC UMR 6072 CNRS
Boulevard du Mar´echal Juin 14050 Caen, France
2
L2S UMR 8506 CNRS Sup´elec
3 rue Joliot-Curie 91192 Gif-sur-Yvette, France
Abstract. In this work, delays affecting either the output measurements or the
input for a class of nonlinear systems are coped with. This problem is particulary
challenging since time delays arise in variety of applications, such as systems
communicating through (wireless) networks. Indeed when the controller is a re-
mote one, delays must be taken into account, affecting both the input and the
output of the system. We first present a set of cascade high gain observers for
triangular nonlinear systems with delayed output measurement. A sufficient con-
dition ensuring the exponential convergence of the observation error towards zero
is given. This approach is then applied to design an output feedback control in the
presence of input delay. These results are illustrated through numerical simula-
tions.
1 Introduction
Systems communicating through wireless network are now quite common. Data trans-
missions such as output measurements or control laws are necessarily subject to delays
inherent to the communication process. The aim of this paper is twofold. Delays af-
fecting either the output measurements or the input for a class of nonlinear systems are
coped with. This problem is particulary challenging since time delays affecting input
or output measurements arise in a variety of applications. One can cite for example
systems which are controlled by a remote controller. In these systems, the input or the
output data are transmitted between the controller and the system throughout a commu-
nication system, which can be a wireless network. This network introduces a time-delay
between the process and the controller. The design of controllers for such systems can
be viewed as an output feedback design based on state prediction system. In the linear
case, this problem has been solved by the well-known Smith predictor [1] and several
predictive control algorithms [2], [3]. Recently, for the nonlinear case, a new kind of
chained observers which reconstruct the state at different delayed time instants for drift
observable systems has been presented in [4]. The authors showed, by using Gron-
wall lemma, that under some conditions on the delay, exponential convergence of the
Cherrier E., Ahmed-Ali T., Farza M., M’Saad M. and Lamnabhi-Lagarrigue F. (2009).
Output Feedback Control for a Class of Nonlinear Delayed Systems.
In Proceedings of the International Workshop on Networked embedded and control system technologies: European and Russian R&D cooperation,
pages 45-55
Copyright
c
SciTePress

chained observers is ensured. These conditions have been relaxed in [5] by using an ap-
proach based on a first-order singular partial differential equation. On the other hand, in
[6] a novel predictor for linear and nonlinear systems with time delay measurement has
been designed. This predictor is a set of cascade observers. Sufficient conditions based
on linear matrix inequalities are derived to guarantee the asymptotic convergence of
this predictor. Concerning delays affecting the input of the system, very little attention
has been paid to this subject. For relevant work, the reader is referred to [7] and the
references therein.
In the present work, the design of nonlinear observers in the presence of delayed
output measurement is first dealt with. To this purpose, we design a set of cascade high
gain observers for nonlinear triangular systems by considering a time delay in the out-
put measurement. We will show that the general high gain observer design framework
developed in [8], [9], [10], to mention a few, for delay-free output measurements can
be extended to systems with delayed output. More precisely, we propose to use a suit-
able Lyapunov-Krasovskii functional and a sufficient number of high gain observers, in
order to guarantee the exponential convergence of the estimated state at time t towards
the true state at time t, even if the output is affected by any constant and known delay.
We will also give an explicit relation between the number of observers and the delay.
Then in a second part, this observer is used to design a feedback controller based on a
dual approach of high gain techniques [11].
The present paper is organized as follows : In section 2, we present the class of con-
sidered systems and the different assumptions. In the third one, we present the proposed
observers and prove their convergence. Section 4 is devoted to the design of a feedback
control law based on the previous observers. In the last section, we illustrate our results
throughout simulations on academic examples.
2 Preliminaries and Notations
First some mathematical notations which will be used throughout the paper are intro-
duced.
The euclidian norm on R
n
will be denoted by ||.||. The matrix X
T
represents the
transposed matrix of X. e
s
(i) = (0, . . . , 0,
i
th
z}|{
1 , 0, . . . , 0)
| {z }
s components
∈ R
s
, s ≥ 1 is the i
th
vector of canonical basis of R
s
. The convex hull of {x, y} is denoted as Co(x, y) =
{λx + (1 − λ)y, 0 ≤ λ ≤ 1}. λ
min
(S) and λ
max
(S) are the minimum and maximum
eigenvalues of the square matrix S.
In the first part of this paper, we consider the following class of nonlinear systems:
˙x = Ax + φ(x, u)
y = Cx(t − τ ) (1)
where

A =
0 1 0 . . . 0
0 0 1 0
.
.
.
.
.
. 0 . . . 1 0
.
.
.
.
.
. . . . . . . 1
0 . . . . . . . . . 0
(2)
C =
1 0 . . . 0
(3)
φ(x, u) =
φ
1
(x, u)
.
.
.
φ
n
(x, u)
(4)
The term τ represents the measurement time delay, x(t) ∈ R
n
is the vector state
which is supposed unavailable. The output y(t) ∈ R is a linear function of the state
x at time t − τ . The input u ∈ U where U is a compact set in R. The functions
φ
i
, i = 1, . . . , n are supposed smooth. This class represents the class of uniformly
observable systems. It has been shown [8], [9] that these models concern a wide variety
of systems, such as bioreactors...
Throughout the paper, we assume that the following hypotheses are satisfied.
H1. The functions φ
i
(x, u) are triangular in x, i.e
∂φ
i
(x,u)
∂x
k+1
= 0, for k = i, . . . , n − 1
H2. The functions φ
i
(x, u) are globally Lipschitz, uniformly in u
H3. The time delay τ is supposed constant and known.
3 Observer Design
In this section, we consider an arbitrary long time delay τ affecting the output mea-
surement of system (1). The proposed nonlinear observer for system (1) is a set of m
cascade high gain observers. Each one of them estimates a delayed state vector with
sufficiently small delay
τ
m
.
In order to present the proposed observer, we use the following convenient notations
adopted from [4]:
x
j
(t) = x(t − τ + j
τ
m
)
where j = 1, . . . , m
Then the proposed observer can be written in the following form, for j = 1, . . . , m:
˙
ˆx
1
= Aˆx
1
+ φ(ˆx
1
) − θ∆
−1
S
−1
C
′
C(ˆx
1
(t −
τ
m
) − x(t − τ ))
ˆy
1
= C ˆx
1
(t −
τ
m
)
.
.
. =
.
.
.
˙
ˆx
j
= Aˆx
j
+ φ(ˆx
j
) − θ∆
−1
S
−1
C
′
C(ˆx
j
(t −
τ
m
) − ˆx
j−1
(t))
ˆy
j
= C ˆx
j
(t −
τ
m
) = C ˆx
j−1
(t) (5)

where θ is a positive constant satisfying θ > 1.
S is a symmetric positive definite matrix, solution of the following algebraic Lya-
punov equation:
SA + A
T
S − C
T
C = −S (6)
and ∆ is a diagonal matrix which has the following form :
∆ = Diag
1, . . . ,
1
θ
i−1
, . . . ,
1
θ
n−1
. (7)
We will show that the vector ˆx
j
(t) estimates the delayed state x
j
(t), j = 1, . . . , m −1
and ˆx
m
(t) estimates x(t).
Before proving the exponential convergence of the proposed chained observers, we
consider the case when the delay τ is sufficiently small. Then only one high gain ob-
server is required to estimate the state of system (1).
Lemma 1. Consider the following observer:
˙
ˆx = Aˆx + φ(ˆx, u) − θ∆
−1
S
−1
C
T
C(ˆx(t − τ ) − x(t − τ ))
ˆy = C ˆx(t − τ ) (8)
Then for sufficiently large positive θ, there exists a sufficiently small positive constant
τ
1
such that ∀τ ≤ τ
1
, observer (8) converges exponentially towards system (1).
Proof
First let us denote the observation error as ˜x = ˆx − x.
Then we will have:
˙
˜x = A˜x + φ(ˆx, u) − φ(x, u) − θ∆
−1
S
−1
C
T
C ˜x(t − τ ) (9)
If we apply the relation
˜x(t) = ˜x(t − τ ) +
Z
t
t−τ
˙
˜x(s)ds (10)
and the change of coordinates ¯x = ∆˜x, system (9) can be rewritten in the following
manner:
˙
¯x = θ(A − S
−1
C
T
C)¯x + ∆(φ(ˆx, u) − φ(x, u)) + θS
−1
C
′
C
Z
t
t−τ
˙
¯x(s)ds. (11)
In order to derive an upper bound τ
1
for the delay τ, to ensure the exponential con-
vergence to zero of the error ¯x, we use the following Lyapunov-Krasovskii functional
[12]:
W = ¯x
T
S ¯x +
Z
t
t−τ
1
Z
t
s
||
˙
¯x(ξ)||
2
dξds. (12)
This functional can be written after an integration by parts as follows (see [12] for more
details):
W = ¯x
T
S ¯x +
Z
t
t−τ
1
(s − t + τ
1
)||
˙
¯x(s)||
2
ds (13)
If we compute its time derivative, we obtain
˙
W ≤ θ¯x
T
(A
T
S + SA − 2C
T
C)¯x + 2¯x
T
S∆(φ (ˆx) − φ(x))
+2θ¯x
T
C
T
C
Z
t
t−τ
˙
¯x(s)ds + τ
1
||
˙
¯x(t)||
2
−
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds (14)

Using (6), we have
˙
W ≤ −θ¯x
T
S ¯x + 2¯x
T
S∆(φ (ˆx) − φ(x)) + −θ¯x
T
C
T
C ¯x + 2θ¯x
T
C
T
C
Z
t
t−τ
˙
¯x(s)ds
+ τ
1
||
˙
¯x(t)||
2
−
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds. (15)
Note that by using the mean value theorem [13], we can write
∆ (φ(ˆx) − φ(x)) = ∆
n,n
X
i,j=1
e
n
(i)
T
e
n
(j)
∂φ
i
∂x
j
(ξ)
!
∆
−1
¯x (16)
where ξ ∈ Cov(x, ˆx).
Then we will have
2¯x
T
S∆(φ (ˆx) − φ(x)) = 2¯x
T
S∆(
n,n
X
i,j=1
e
n
(i)
T
e
n
(j)
∂φ
i
∂x
j
)∆
−1
¯x (17)
Using the triangular structure and the Lipschitz properties of the functions φ
i
, and the
fact that θ > 1, we deduce that
||2¯x
T
S∆(φ (ˆx) − φ(x))|| ≤ k
1
V (18)
where V = ¯x
T
S ¯x and k
1
is a positive constant which does not depend on θ.
Using the following property :
2θ¯x
T
C
T
C
Z
t
t−τ
˙
¯x(s)ds − θ¯x
T
C
T
C ¯x
= −θ(Cx + C
Z
t
t−τ
˙
¯x(s)ds)
T
(Cx + C
Z
t
t−τ
˙
¯x(s)ds)
+ θ(
Z
t
t−τ
˙
¯x(s)ds)
T
C
T
C(
Z
t
t−τ
˙
¯x(s)ds). (19)
This means that
2θ¯x
T
C
T
C
Z
t
t−τ
˙
¯x(s)ds − θ¯x
T
C
T
C ¯x ≤ θ(
Z
t
t−τ
˙
¯x(s)ds)
T
C
T
C(
Z
t
t−τ
˙
¯x(s)ds) (20)
From this, we will have
˙
W ≤ −θV + k
1
V + θ(
Z
t
t−τ
˙
¯x(s)ds)
T
C
T
C(
Z
t
t−τ
˙
¯x(s)ds)
+τ
1
||
˙
¯x(t)||
2
−
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds (21)
Now, let us remark that if we use equation (11), it comes:
||
˙
¯x(t)||
2
≤ θ
2
k
2
[V + ||
Z
t
t−τ
˙
¯x(s)ds||
2
] (22)

where k
2
is also a positive constant which does not depend on θ.
Using this and equation (21), we will have:
˙
W ≤ −θV + k
1
V + θI
T
C
T
CI + τ
1
θ
2
k
2
[V + ||I||
2
] −
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds. (23)
where I =
Z
t
t−τ
˙
¯x(s)ds.
To prove the above lemma (1), it is sufficient to find conditions which guarantee the
inequality
˙
W +
1
√
θ
W < 0.
From (23), we can write
˙
W +
1
√
θ
W ≤ −θV + k
1
V +
V
√
θ
+ θI
T
C
T
CI + τ
1
θ
2
k
2
[V + ||I||
2
]
+
τ
1
√
θ
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds −
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds. (24)
If we use the following Jensen’s inequality :
Z
t
t−τ
1
||
˙
¯x(s)||
2
ds ≥
1
τ
1
||I||
2
(25)
and if τ
1
≤
√
θ, we have
˙
W +
1
√
θ
W ≤ −(θ − k
1
− τ
1
θ
2
k
2
−
1
√
θ
)V − (
1
τ
1
− θ − τ
1
θ
2
k
2
−
1
√
θ
)||I||
2
(26)
Then, we can say that lemma 1 is verified for
θ ≥ max{2, (k
1
+ k
2
+
1
√
2
)}
τ
1
=
1
θ
2
.
(27)
To summarize Lemma 1, it gives the maximum delay supported by observer (8) which
enables ˆx(t) → x(t), once θ has been fixed according to conditions (27). To cope with
a larger measurement delay, we propose in next paragraph a procedure to estimate x(t),
based on a chain of high-gain observers: each observer will estimate the state at a given
fraction of the output delay.
Cascade High Gain Observers. After proving that the convergence of the observer (8)
requires a small delay, we will see that when the delay is arbitrary long, a set containing
a sufficient number of cascade high gain observers (5) can reconstruct the states of
system (1).
Theorem 1. Let us consider system (1), then for any constant and known delay τ, there
exist a sufficiently large positive constant θ and an integer m such that the observer (5)
converges exponentially towards the system (1).
Proof
The convergence of the cascade observer will be proved step by step :

Step 1: We consider the first observer in the chain:
˙
ˆx
1
= Aˆx
1
+ φ(ˆx
1
) − θ∆
−1
S
−1
C
T
C(ˆx
1
(t −
τ
m
) − x(t − τ ))
ˆy
1
= C ˆx
1
(t −
τ
m
) (28)
We remark that x(t − τ) = x
1
(t −
τ
m
) and consequently, if we choose θ sufficiently
large, and by choosing the integer m such that m ≥ θ
2
τ, then ˆx
1
(t) converges towards
x
1
(t) = x(t − τ +
τ
m
) = x(t − (m − 1)
τ
m
).
Indeed, we are brought back to conditions of Lemma 1, since the delay to handle with
is now
τ
m
, which is assumed smaller than
1
θ
2
.
Step j: at each step (j = 2, . . . , m), we estimate the delayed state x(t − τ + j
τ
m
)
by using the following observer:
˙
ˆx
j
= Aˆx
j
+ φ(ˆx
j
) − θ∆
−1
S
−1
C
T
C(ˆx
j
(t −
τ
m
) − ˆx
j−1
(t))
ˆy
j
= C ˆx
j
(t −
τ
m
) = C ˆx
j−1
(t) (29)
It is not difficult to see that by considering the observation error vector ˜x
j
= x
j
− ˆx
j
,
if we add and subtract the term θ∆
−1
S
−1
C
T
Cx
j−1
(t) in the previous equation, we
obtain
˙
˜x
j
= A˜x
j
+ φ(ˆx
j
) − φ(x
j
) − θ∆
−1
S
−1
C
T
C(˜x
j
(t −
τ
m
) − ˜x
j−1
(t)) (30)
If we consider the following change of coordinates ¯x
j
= ∆˜x
j
, we will have
˙
¯x
j
= θ(A − S
−1
C
T
C)¯x
j
+ ∆(φ(ˆx
j
) − φ(x
j
))
+ θS
−1
C
T
C
Z
t
t−
τ
m
˙
¯x
j
(s)ds − θS
−1
C
T
C ¯x
j−1
. (31)
In order to prove by recurrence the convergence of the error ¯x
j
, we suppose that the
observation error ¯x
j−1
(t) converges exponentially towards zero.
Then we consider the following Lyapunov-Krasovskii functional
W
j
= ¯x
T
j
S ¯x
j
+
Z
t
t−
τ
m
(s − t +
τ
m
)||
˙
¯x
j
(s)||
2
ds (32)
Then its time derivative satisfies the following inequality:
˙
W
j
≤ −θ¯x
T
j
S ¯x
j
+ 2¯x
T
j
S∆(φ (ˆx
j
) − φ(x
j
)) + −θ¯x
T
j
C
T
C ¯x
j
− 2θ¯x
T
j
C
T
C ¯x
j−1
+2θ¯x
T
j
C
T
C
Z
t
t−τ
˙
¯x
j
(s)ds + τ
1
||
˙
¯x
j
||
2
−
Z
t
t−τ
1
||
˙
¯x
j
(s)||
2
ds. (33)
As in the proof of the lemma 1, we will also have:
˙
W
j
≤ −(θ − k
′
1
)V
j
+ θI
T
j
C
T
CI
j
− 2θ ¯x
T
j
C
T
C ¯x
j−1
+ τ
1
||
˙
¯x
j
||
2
−
Z
t
t−τ
1
||
˙
¯x
j
(s)||
2
ds (34)

where V
j
= ¯x
T
j
S ¯x
j
, I
j
=
R
t
t−τ
˙
¯x
j
(s)ds and k
′
1
is a positive constant which does not
depend on θ and k
′
1
≥ k
1
.
Now, by using Young’s inequality, we derive the following inequalities
||
˙
¯x
j
||
2
≤ τ
1
k
′
2
θ
2
(V
j
+ ||I
j
||
2
+ ||¯x
j−1
||
2
) (35)
−2θ¯x
T
j
C
T
C ¯x
j−1
≤
1
√
θ
V
j
+
θ
2
√
θ
λ
min
(S)
||¯x
j−1
||
2
. (36)
where k
′
2
is a positive constant which does not depend on θ and k
′
2
≥ k
2
.
Choosing τ
1
=
1
θ
2
, and using (34), (35) and (36), we derive
˙
W
j
+
1
√
θ
W
j
≤ −(θ − k
′
1
− τ
1
θ
2
k
′
2
−
2
√
θ
)V
j
− (
1
τ
1
− θ − τ
1
θ
2
k
′
2
−
2
√
θ
)||I
j
||
2
+(
θ
2
√
θ
λ
min
(S)
+ k
′
2
)||¯x
j−1
||
2
(37)
Then, we can say that if
θ ≥ 2 + k
′
1
+ k
′
2
, τ
1
=
1
θ
2
(38)
we will have
˙
W
j
≤ −
1
√
θ
W
j
+ (
θ
2
√
θ
λ
min
(S)
+ k
′
2
)||¯x
j−1
||
2
(39)
Using the comparison lemma [14], we conclude that if ¯x
j−1
converges exponentially
towards zero, then ¯x
j
converges also exponentially towards zero. Note that conditions
(38), also ensure the convergence of the first observer (j = 1), then we deduce, recur-
sively, that all observation errors converge exponentially towards zero.
4 Output Feedback Controller Design
In previous section, we addressed an observer synthesis issue, when the output mea-
surement is affected by any delay. Now we consider what can be thought of as a dual
problem. The aim is to design a stabilizing feedback control law when the controller
is a remote one, which inevitably leads to delays on the system input. To this end we
consider the following class of nonlinear systems:
˙x(t) = Ax(t) + φ( x(t)) + bu(t − τ )
y(t) = Cx(t)
(40)
and we assume that hypotheses H
1
to H
3
are fulfilled.
We detail now a solution to the above problem that makes use of the previous results.
In order to cope with the input delay, we use the above cascaded observer (5) to derive
a prediction of state x(t) used in the feedback control u(t − τ). For sake of simplicity,
we suppose that we need only one observer to face this delay. The same reasoning as in
previous section can be extended to deal with a larger delay, with cascaded observers.

Using the work developed in [11], the feedback control which stabilizes (40) can be
expressed as:
u(t) = −λ
n
b
T
¯
S∆
λ
ˆx(t + τ ) (41)
where λ > 0 is a suitable tuning parameter like the parameter θ in the observer design
and the matrix ∆
λ
is defined as in (7) where θ is replaced by λ.
Using the results detailed in previous section, ˆx(t + τ) can be computed, see (5).
Then this predicted state is used to compute eq. (41). As a consequence, this prediction
cancels the effects of the delay affecting the transmission of the control law.
We give now a sketch of how to proceed. • Make the following variable change
to obtain an estimation of the predicted state: z(t) = ˆx(t + τ ). This is equivalent to
ˆx(t) = z(t − τ).
Then the observer can be expressed as:
˙z(t) = Az(t) + φ(z(t)) + bu(t) − θ∆
−1
θ
S
−1
C
T
(y(t) − z(t − τ ))
(42)
where u(t) = −λ
n
b
T
¯
S∆
λ
z(t).
We are now brought back to the former problem of section 3. • The key point is to use
the delayed control law u(t −τ) in the system dynamics, which corresponds to the real
applied control, whereas we use u(t) in the observer’s dynamics.
•The reader is referred to [11] for a detailed proof of the stabilization of the system (40)
and the convergence of the observer (42).
5 Example
To illustrate the obtained results, consider the following nonlinear system, affected first
only by delayed measurements:
˙x
1
(t) = x
2
(t)
˙x
2
(t) = −2x
1
(t) + 0.5 tanh ( x
1
(t) + x
2
(t)) + x
1
(t)u(t)
y(t) = x
1
(t − τ )
(43)
The input is u(t) = 0.1 sin(0.1t). System (43) belongs to the considered class of
triangular systems with Lipschitz nonlinearities (1).
The initial conditions for the system and for the observer have been chosen as x(t) =
1 −1
T
, ˆx(t) =
0 0
T
, ∀t ∈ [−τ, 0].
Simulations have been performed using Matlab-Simulink, and a fourth order Runge-
Kutta integration routine. The high gain parameter is set to θ = 2, the control parameter
is set to λ = 2. We show the efficiency of the stabilizing control law given in eq. (40)
and (41), based on observer (42), on the example below:
˙x
1
(t) = x
2
(t)
˙x
2
(t) = −2x
1
(t) + 0.5 tanh ( x
1
(t) + x
2
(t)) + u(t − τ )
y(t) = x
1
(t)
(44)
The stabilization of the controlled state to zero is shown in figure 1.
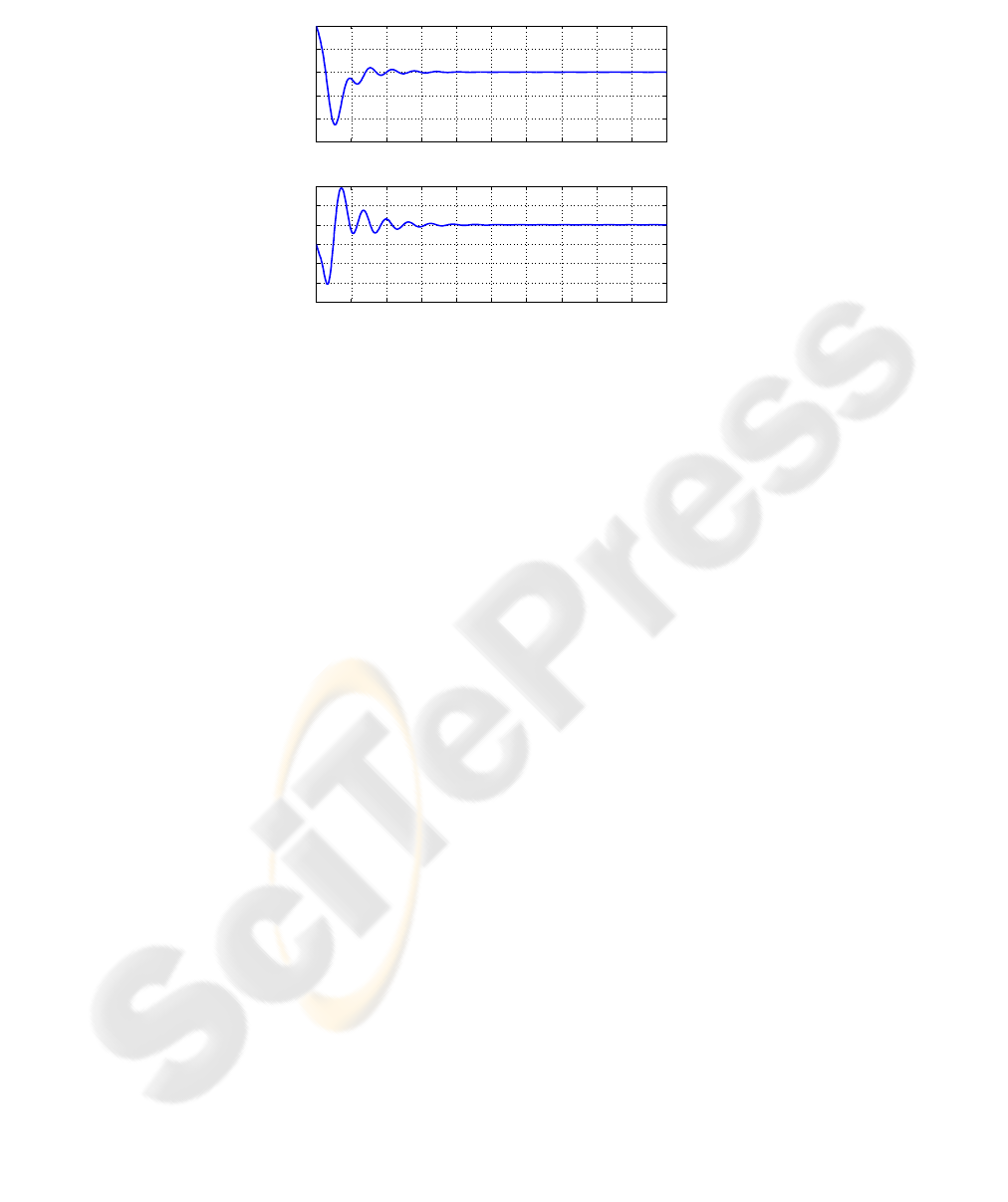
0 2 4 6 8 10 12 14 16 18 20
−1.5
−1
−0.5
0
0.5
1
State x
1
Time (s)
0 2 4 6 8 10 12 14 16 18 20
−4
−3
−2
−1
0
1
2
State x
2
Time (s)
Fig.1. Evolution of the controlled states.
6 Conclusions
In this paper, a novel predictor based on high gain observer has been presented. This
observer can be applied to the class of nonlinear uniformly observable systems, subject
to input or output delays arising from communication networks for example. The case
of a variable delay can be considered on the basis of the presented work. The design of
adaptiveobservers for nonlinear systems with delayed output and uncertain or unknown
parameters is under investigation.
References
1. Smith, O.: Closer control of loops with dead-time. Chem. Eng. Prog. 53 (1957) 217–219
2. Clarke, D., Mohtadi, C., Tuffs, P.: Generalized predictive control-part I and II. Automatica
23 (1987) 137–160
3. Shaked, U., Yaesh, I.: H-infinity static output-feedback control of linear continuous-time
systems with delay. IEEE Trans. Automatic Control 43 (1998) 1431–1436
4. Germani, A., Manes, C., Pepe, P.: A new approach to state observation of nonlinear systems
with delayed output. IEEE Trans. Automatic Control 47 (2002) 96–101
5. Kazantzis, N., Wright, R.: Nonlinear observer design in the presence of delayed output
measurements. Sys. & Control Letters 54 (2005) 877–886
6. Besanc¸on, G., Georges, D., Benayache, Z.: Asymptotic state prediction for continous-time
systems with delayed input and application to control. In: Proceedings of the European
Control Conference, Kos, Greece. (2007)
7. Mazenc, F., Bliman, P.: Backstepping design for time-delay nonlinear systems. IEEE Trans.
Automatic Control 51 (2006) 149– 154
8. Bornard, G., Hammouri, H.: A high gain observer for a class of uniformly observable sys-
tems. In: Proceedings of the 30th IEEE Conference on Decision and Control, Brighton,
England. (1991)
9. Gauthier, J., Hammouri, H., Othman, S.: A simple obsever for nonlinear systems: Applica-
tion to bioreactors. IEEE Trans. Automatic Control 37 (1992) 875–880

10. Hammouri, H., Farza, M.: Nonlinear observers for locally uniformly observable systems.
ESAIM J. on Control, Optimisation and Calculus of Variations 9 (2003) 353–370
11. Maˆatoug, T., Farza, M., M’Saad, M., Kouba, Y., Kamoun, M.: Adaptive output feedback
controller for a class of uncertain nonlinear systems. In: Proceedings 17th IFAC World
Congress, Seoul, Korea. (2008)
12. Fridman, E.: New LyapunovKrasovskii functionals for stability of linear retarded and neutral
type systems. Sys. & Control Letters 43 (2001) 309–319
13. Zemouche, A., Boutayeb, M., Bara, G.I.: Observer design for nonlinear systems : An ap-
proach based on the differential mean value theorem. In: Proceedings of the Joint 44th
IEEE Conference on Decision and Control and European Control Conference, Seville, Spain.
(2005)
14. Khalil, H.: Nonlinear Systems. Prentice Hall (2002)
