
Integration of Mobile RFID and Inertial Measurement
for Indoor Tracking of Forklifts Moving Containers
M. Fodor
1
, O. Gusikhin
1
, E. Tseng
1
and W. Wang
2
1
Ford Motor Company
Research and Innovation Center
20000 Rotunda Drive, Dearborn, MI 48121, U.S.A.
2
Ford Motor Company
Walton Hills Stamping Plant
7845 Northfield Road, Bedford, OH 44126, U.S.A.
Abstract. Described are the motivation and a method for combining readings
of RFID tags placed in static locations in a plant environment using a mobile
reader attached to a forklift and inertial measurements of the motion of the
forklift to track its position and ultimately the positions of containers it moves
within the plant. Strengths and limitations of RFID-based and inertial-based
methods are presented along with an algorithm for postprocessing and
combining the readings of each. The accuracy of the resulting position
estimates are shown to be on the same order as the accuracy of RFID reader
range variation.
1 Introduction
Desire for real-time visibility of inventory and assets across the supply chain is
driving fast adoption of advanced information technology for location tracking.
Location information eliminates the need for non-value added inventory search
activities and creates a foundation to further optimize the operational efficiency of
business units [1]. While the integration of RFID, GPS, and wireless communication
is already common for the logistics industry to track products in routes between
supply chain sites [2], tracking within indoor environments such as plants and
warehouses is still a challenging problem.
Advancements in RFID technology have facilitated locating tagged assets
indoors [3]. In particular, the field of Real Time Locating Systems (RTLS) is rapidly
growing, primarily employing active RFID. Existing RTLS solutions differ in
operating frequency, methods, granularity, accuracy, and the resulting cost of
infrastructure and operation. Despite significant development, RTLS is presently
prohibitive for commodity item tracking due to the substantial cost of active RFID
and is typically employed only for tracking personnel and expensive resources.
Tracking commodity inventory or containers is usually accomplished using
passive RFID and fixed readers operating at "choke points", providing zoning
location of a given inventory item. For a large area, the infrastructure cost can be
very high, and often fixed readers are installed only at shipping and receiving doors,
providing inventory information but not location. The recent introduction of forklift-
Fodor M., Gusikhin O., Tseng E. and Wang W. (2009).
Integration of Mobile RFID and Inertial Measurement for Indoor Tracking of Forklifts Moving Containers.
In Proceedings of the 3rd International Workshop on Intelligent Vehicle Controls & Intelligent Transportation Systems, pages 120-129
Copyright
c
SciTePress

mounted mobile RFID readers [4] addresses the problem of limited visibility into
inventory locations associated with choke points. In this case the locations of the
inventory items can be recorded from the location of the RFID reader at the point of
unloading. Provided that these items will be moved using only vehicles equipped
with the reader and the location of the reader is known, this method can offer
relatively reliable location records. A number of different approaches have been
proposed for localization of mobile readers. In addition to the RFID-based RTLS
mentioned above [5, 6], other technologies include Wi-Fi, Ultrasonic, and Infrared.
Often these network-centric approaches are hampered by the need for a substantial
initial investment in infrastructure to ensure the required coverage and accuracy. An
alternative approach relies on sensors and instrumentation installed on the delivery
vehicle to track its location.
There is a substantial body of knowledge related to vehicle-centric localization
methods developed within the field of robotics [7] and successfully applied in
industrial settings [8]. The most common approaches are dead reckoning and the use
of landmarks. Dead reckoning is a method of finding the relative position of a mobile
device from a previous known position using inertial measurements or odometry.
Challenges with this method include the need to know the original position and the
accumulation of errors requiring continuous resetting of position using other sensors.
Landmark-based localization determines the absolute position of the device through
the recognition of predetermined distinct natural or artificial features of the
environment. Artificial landmarks are location reference markers attached to walls,
ceiling, or floor that can be easily recognized by vehicle-mounted instrumentation and
can be relatively inexpensive to install. Examples include special visual patterns [9],
infrared light-emitting diodes [10], and RFID tags [11-13].
Although both dead reckoning and landmark-based methods are error-prone,
fusion of the two can result in relatively reliable localization. Several localization
methods have been proposed that deal with uncertainty of the measurement data and
provide data fusion from different noisy sources such as dead reckoning and
landmarks. The Kalman Filter is a widely used method to compensate for noise and
is applicable to the localization problem [14]. Monte-Carlo or Particle Filter
localization [15] and fuzzy logic [16] have also been considered. In this paper we
present an algorithm for the fusion of RFID-based localization and inertial
measurement to obtain an accurate location of a delivery vehicle (forklift). With the
forklift already equipped with a mobile RFID reader, it is logical to consider the use
of passive RFID labels to create static location references in the environment. Since
the application considered does not require instantaneous knowledge of an asset's
location, the data from both inertial measurements and RFID are fused using post-
processing.
This paper describes the automotive part stamping environment and the need for
container tracking. Passive RFID and inertial-based localization are then presented
with strengths and weaknesses of each individually. The synergistic fusion of the two
methods is shown to eliminate the weaknesses of each and is further improved by
post-processing. The data fusion algorithm is then described, followed by
conclusions.
121

2 Background
The automotive stamping plant is a first tier supplier providing major components for
the vehicle body including doors, fenders, roofs, etc. The stamping plant supplies
parts to assembly plants and service facilities using truck or rail transportation. In
general, the stamping process consists of blanking, die press, and assembly/welding
operations. At the end of the press or assembly operations the parts are placed into
metal racks that are used to store and transfer them between stamping operations and
customers. Containers hold 8 to several hundred parts each and are unique to each
part. Typically, the size of the racks range between 4 to 12 feet in length, 3 to 7 feet
in width, 4 to 8 feet in height, and weigh up to 5000 lb when loaded. There are over
20,000 racks in any given plant, and for each given part type there is a limited rack
fleet. It is important to closely monitor the flow of racks within the plant and between
the plant and the customer's site. If the empty racks are not received back from the
customer on time or are held at the repair area, there may be an insufficient number of
racks to support production, resulting in non-optimal production batch sizes or
hampering the ability of the plant to satisfy customer demand. Each rack is tagged
with a passive RFID label, and fixed readers at shipping doors monitor rack flow
between the plant and its customers. However, more granular tracking using fixed
readers would require a substantial investment in infrastructure as a typical stamping
facility is over 1,000,000 square feet.
Fig. 1. Schematic of the flow of racks associated with the given work center.
The racks are handled by forklifts which move between the end of manufacturing
lines and storage areas, to and from trucks and rail cars, or to and from a repair area.
Figure 1 illustrates the rack flow within a typical stamping facility and associated with
a given set of parts produced by an assembly-welding operation (work center). The
Assembly
Work Center
Repair
Area
Customer A
Shipping Storage
Customer B
122

forklift transfers the racks with parts from the work center to the dedicated shipping
storage area and brings empty racks back to the work center. These parts can then be
loaded onto trucks or rail cars. If there are quality concerns regarding the parts stored
in the shipping area, the forklift may move these parts into a repair area and then
back. A typical stamping facility employs 40 forklifts, and each forklift is equipped
with a wireless terminal that can exchange data with a back office computer.
The many benefits of knowing the specific location and status of racks (full,
empty, or in repair) include saving time for material handling personnel locating
inventory and reducing downtime caused by unavailability of racks. In addition,
when parts are quarantined due to quality concerns, location information can reduce
the number of racks that are pulled from inventory. Location and status information
can also facilitate a first-in-first-out (FIFO) inventory control system, improve
inventory turnover rate, reduce the potential for obsolete parts, and improve material
flow and space utilization.
3 Inertial Tracking
Inertial measurement of motion involves the use of linear accelerometers and/or
rotational rate sensors whose signals are mathematically integrated to produce speed
and position estimates. These sensors are deployed in a wide array of applications
including air, space, and ground vehicles as well as various consumer electronic
systems. In each application, the orientation or dynamic motion state of the vehicle or
device is of interest. Automotive applications include anti-lock braking, traction
control, yaw and roll stability controls. Typical sensor sets for ground vehicles
measure longitudinal and lateral vehicle accelerations and yaw rate, with roll rate
seeing wider use now in roll mitigation systems. In automotive applications, vehicle
wheel speed sensors and GPS may also be added.
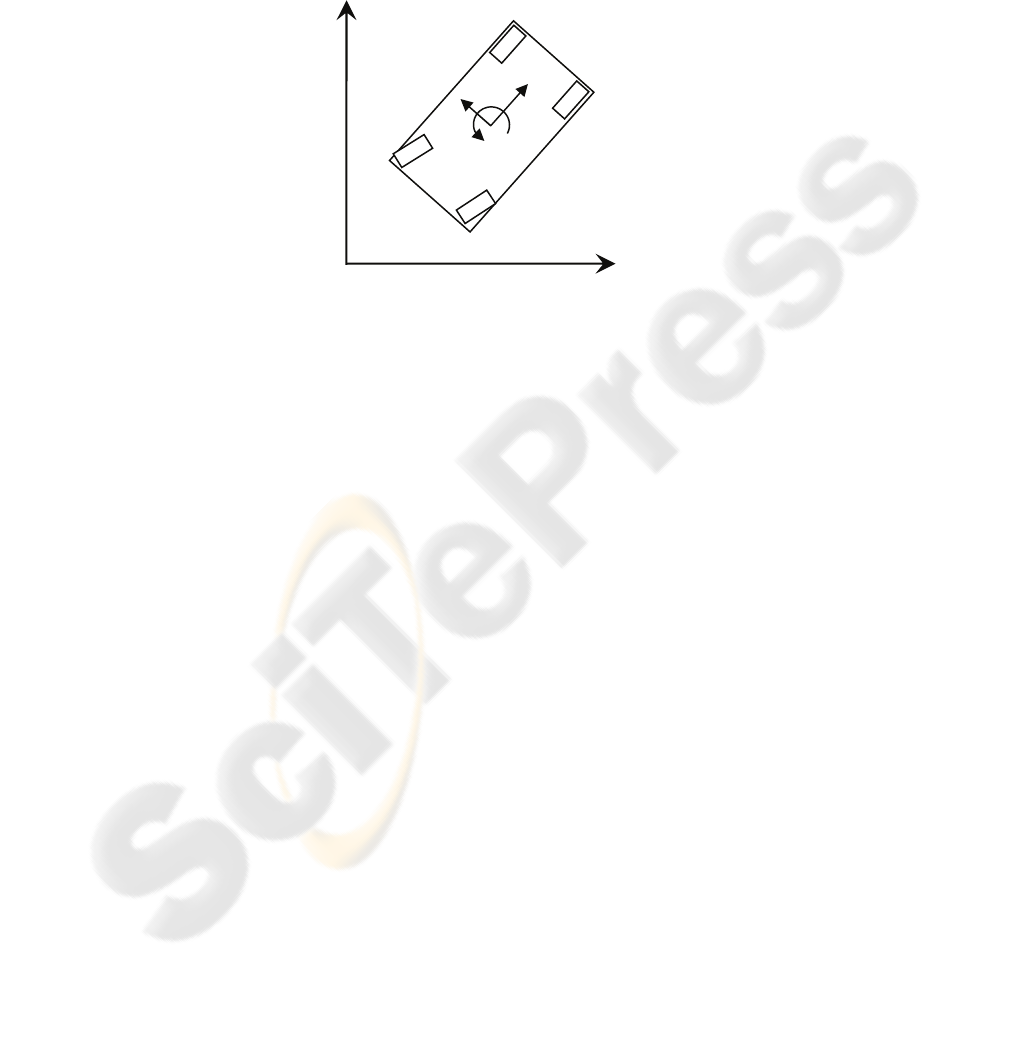
A general-purpose method for tracking a system in two-dimensional space
involves combining longitudinal and lateral accelerations and yaw rate. Yaw rate
ψ
&
(see Figure 2 for signal and axis definitions) is integrated to provide yaw angle or
heading:
∫
+=
t
dtt
0
0
)(
ψψψ
&
. (1)
Vehicle-fixed longitudinal (x-axis) and lateral (y-axis) accelerations, a
x
and a
y
respectively, are then combined with heading and yaw rate to give velocities in the
fixed frame of reference (with respect to inertial ground):
[
]
∫
−−+=
t
yyxxx
dtVaaVtV
0
0,
)sin()cos()(
ψψψ
&
, (2)
() ()
[
]
∫
+++=
t
xxyyy
dtVaaVtV
0
0,
sincos)(
ψψψ
&
. (3)
123
Finally, these inertial velocities are integrated to give positions in the inertial frame:
∫
+=
t
x
dtVXtX
0
0
)( , (4)
∫
+=
t
y
dtVYtY
0
0
)( . (5)
Fig. 2. IMU signals and axes.
Because the sensor measurements are prone to offset and noise errors, this
double-integrating process results in error accumulation, limiting the time and
distance over which this process provides acceptable results. These limitations can be
mitigated to some degree by including kinematic constraints on the integration
process which are imposed by the vehicle itself. For instance, the forward speed, yaw
rate, and lateral acceleration of a wheeled vehicle are coupled directly as long as the
vehicle moves without sliding its wheels (a good assumption for heavy, factory floor
forklifts). Additionally, vehicle states such as speeds and rotational rates are bounded
by the vehicle operating envelope. The inertial tracking method benefits from a
continuous stream of data from the sensors, resulting in uninterrupted, fine-grained
position information. However, to anchor the path calculation in absolute space, the
position, heading, and velocity of the vehicle at the initiation of tracking (X
0
, Y
0
, V
x,0
,
V
y,0
, and
ψ
0
) must be known by some other means. For this reason, in addition to the
drift problem, inertial tracking alone is not completely suitable for forklift tracking.
4 RFID Grid Tracking
Unlike inertial tracking that drifts and has no inherent connection to absolute space,
RFID tags used as a tracking system can be physically connected to the operating
environment itself. RFID as a static positioning system requires the use of both tags
as well as a reading device that receives their identification information. The tags are
either attached at various fixed and known locations in the plant environment and
detected with a reader attached to the forklift, or they are deployed on the forklift and
x
a
ψ
&
y
a
X
Y
124

read with a plurality of stationary readers. The former approach is advantageous as it
also facilitates the detection of the tagged and tracked inventory (racks). If the
location tags are deployed in a fine enough mesh within the plant environment,
forklift tracking can be accomplished using this method alone. However, despite their
low cost, passive RFID tags must still be installed, cataloged, and maintained and are
subject to damage in the hostile plant environment where suitable safe installation
locations may be few and far between. For example, a typical stamping plant may
have support columns, the only suitable installation location for tags, separated by 40
feet or more.
There are other inaccuracies as well. Because the tags can be read at a distance
from a range of orientations, the exact location of the reading device attached to the
tracked vehicle is not known when communication is acquired with a tag. Therefore,
the static RFID tag location signal has some position error since the passing reading
device can only be assumed to be located within some expected range (10 to 15 feet)
of the energized tag. Additionally, there may be time when the tracked vehicle is not
in range of any tag or where a tag is damaged and inoperative. Thus the RFID
tracking method, while attached to inertial space, is nevertheless somewhat
inaccurate, discrete in nature, and intermittent.
5 IMU and RFID Fusion
Combining the inertial (IMU) and static (RFID) tag data can reduce or eliminate the
limitations associated with each individually. The inertial measurements provide
continuous data that is potentially accurate enough to reasonably "connect the dots"
between the sparse static tag data. Using the absolute position data from the RFID
tags, offset errors in the IMU readings can be estimated and removed, resulting in
improved positioning, and the IMU data integration can be initialized with static
RFID location information to connect it to absolute space.
In the automotive stamping plant setting, the instantaneous location of a tracked
vehicle is less important than an accurate estimate of the vehicle's path during a
finished delivery as each event takes a few minutes or less. Therefore, the method
proposed here assumes that inertial sensor data and static tag data will be collected
and stored during an event. When the event ends, the data will be post-processed to
determine the path of the delivery vehicle (especially its end points). Using data from
the entire event provides a richer data set from which to calculate path, whereas
attempting a continuous, immediate position estimate during the delivery event limits
the calculations to data that has occurred in the past only and provides no real benefit
as the post-processed data is timely enough (within a few seconds of the event
ending) for the stamping environment.
6 Postprocessing using Best-Fit Optimization
The proposed computational method relies upon a recursive solution that makes
repeated guesses of the initial vehicle position and IMU sensor offsets to attempt to
125

minimize the error between the resulting IMU-based path estimate and the known
locations of the static RFID position readings taken over that path. As the solution
converges, RFID reader range information is employed to attempt to predict the RFID
signal acquisition and loss locations to further improve solution fidelity. The full
method is consists of the following 6 steps.
Step 1. Inertial (IMU) and static tag (RFID) data is collected during an inventory
delivery event. Inertial data is collected continuously at a regular rate, typically 10 to
100 Hz. Static tag data consists of the time and ID number of each tag as
communication with the tag is acquired and then lost.
Step 2. Upon completion of the delivery event (determined by observing acquisition
and loss of inventory tag readings), the vehicle path is reconstructed solely from the
inertial data by making vehicle initial state assumptions (X
0
, Y
0
, V
x,0
, V
y,0
, and
ψ
0
).
Typically, these initial conditions are chosen based on information from the end of the
previous delivery event.
Step 3. Using a best guess position for each RFID tag reading, one that represents the
most likely average vehicle position while it is in communication range with the
location tag, a path error calculation is made using the path constructed in Step 2:
[][]
∑
−+−=
n
nRFIDnnRFIDn
YtYXtX
n
E
1
2
,
2
,
)()(
1
. (6)
Here n is an index indicating the acquisition and loss events for the RFID tag
readings, and X(t
n
) and Y(t
n
) give the position of the IMU integration calculation
(Equations 1-5) at these RFID tag detection times. The best guess positions, X
RFID,n
and Y
RFID,n
, are unique for each tag and are based on the position of the tag, the most
likely vehicle path followed when in range of the tag, and the reader's expected
communication range. These values can be cataloged during the tag's installation or
constructed from data collected during system operation.
Step 4. The assumed vehicle initial state (first used in Step 2) is perturbed, and Steps
2 and 3 are repeated until these parameters converge to minimize the error calculated
in Step 3. This iterative process can be conducted using any of a number of
optimization algorithms such as Matlab's fminsearch function. The result of this step
is the best match of the inertial sensor-based position to the best guess RFID tag
positions used in Step 3.
Step 5. The result of Step 4 is used to calculate the most likely RFID tag acquisition
and loss locations using detection range assumptions. At each time of acquisition or
loss, the vehicle position (from Step 4) and tag location data are used to find the
intersection of the estimated vehicle path with the locus of expected tag detection
range points. This locus can be assumed to be circular, or more complex shapes can
be used based on more detailed tag and reader information. These new
126
acquisition/loss points establish a more likely vehicle path for further optimization of
the vehicle initial conditions (X
0
, Y
0
, V
x,0
, V
y,0
, and
ψ
0
).
Step 6. Steps 3 and 4 are repeated using the new acquisition/loss positions produced
in Step 5. These positions are updated with each iteration of the inertial data path
optimization, and this step is repeated until the solution converges and each
subsequent iteration produces a path prediction that is negligibly different from the
iteration before.
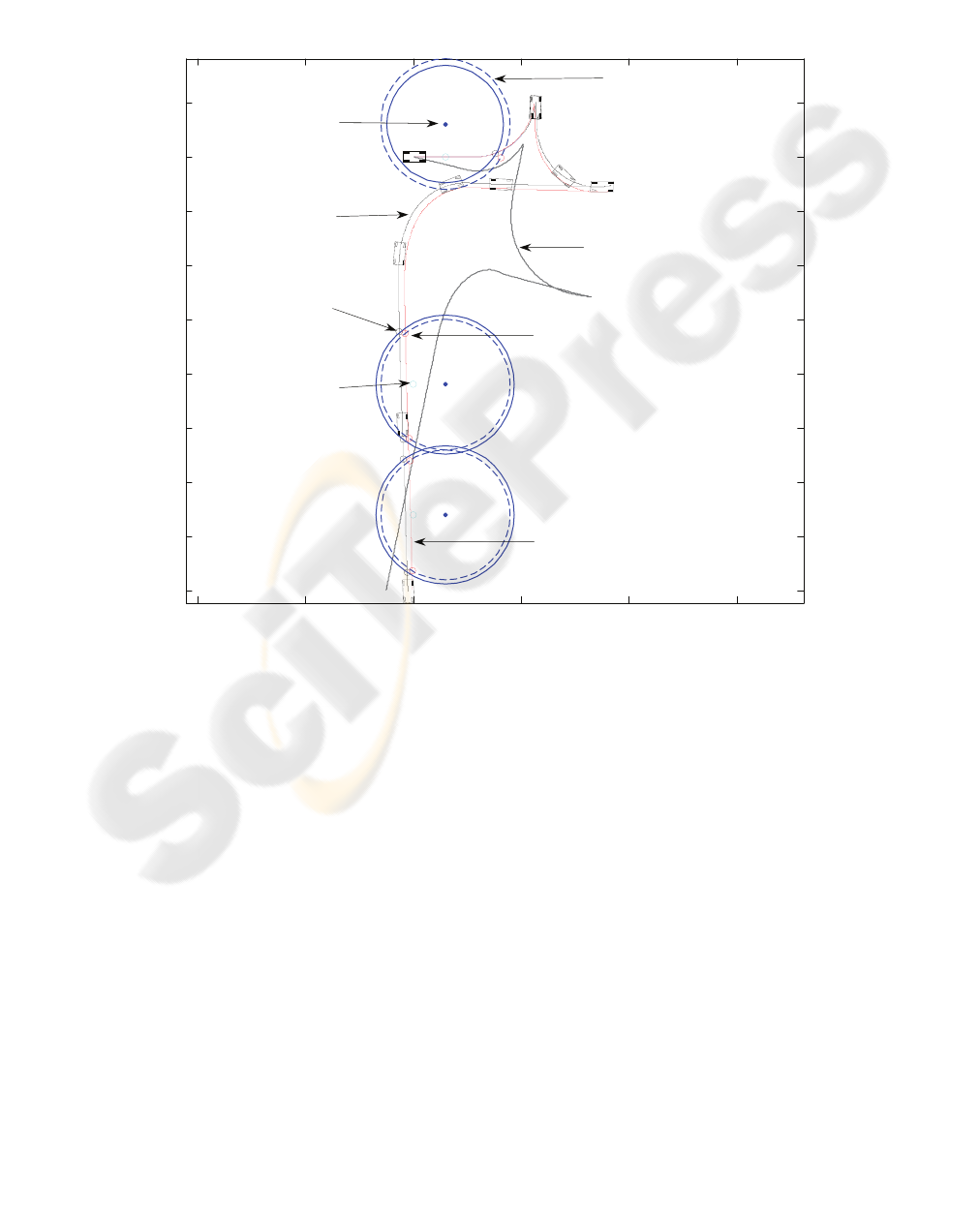
Fig. 3. Forklift path reconstruction showing actual forklift position evenly spaced in time,
RFID antenna locations and ranges, initial path estimate, and final path estimate after ten
iterations.
Figure 3 illustrates several of the aspects of the method described above. The
actual path of the forklift is shown for a delivery event with forklift orientation
superimposed at regular time intervals. Large solid circles surround the RFID
location tags and depict their actual detection range, while the large dashed circles are
the assumed reader ranges used in Step 5. The smaller circles located within the tag
-20 -10 0 10 20 30
-40
-35
-30
-25
-20
-15
-10
-5
0
5
X-Position, [m]
RFID senso
r
locations
Actual vehicle path
Path estimate based on
initial best guess sensor
locations (Step 4)
Initial best guess
sensor locations
(Step 3)
Actual static
sensor acquisition
& loss
p
oints
Optimized vehicle path
(Step 6) after 10 iterations
Static sensor assumed
(dotted line) and actual
(solid line) communication
ranges
Calculated sensor
acquisition/loss points
(Step 5) after 10 iterations
Y-Position, [m]
127

detection range are the initial best guess detection locations used in Step 3, and the
half-tone line is the path resulting from the optimization using these points (result of
Step 4). Shown also is the result of the 10th iteration of Step 6 using updated
acquisition and loss points calculated in Step 5. Note the convergence of the
optimized path toward the actual path from the Step 4 result to the Step 6 result.
The accuracy of the path reconstruction depends mostly on the accuracy of the
assumed reader detection range as compared to the actual range. Note from the figure
that the path error (the distance between the actual and final estimated path) is
roughly the same size as the reader range variability. For a typical forklift-mounted
RFID reader, this is 5 – 10 feet. Solution accuracy can be further improved by
including inertial sensor offset errors that are optimized with the initial conditions.
7 Conclusions
Presented here is an effective method of indoor localization of forklift vehicles
equipped with mobile RFID readers. The method is based on the fusion of inertial
measurements with information from static RFID location tags. While each individual
method alone is prone to substantial errors, fusion of the two can provide results of
reasonable quality while minimizing the cost of implementation. The accuracy of the
resulting location estimate depends on the spacing of the location tags throughout the
plant as well as the variability of the RFID reader detection range. In practice it is
possible to achieve an accuracy within 5-7 feet which is acceptable for the stamping
plant problem.
The ultimate goal of this development is to determine and record the locations of
the RFID tagged containers handled by a given forklift. Specifically, the described
approach has been developed to track the rack locations for automotive stamping
plants. While this paper has focused on the fusion of the inertial measurements with
the static information from the RFID tag locations for the purpose of tracking the
delivery vehicle, it should be noted that the full material tracking problem is more
complex. In addition to location awareness, the pick-up and delivery event with its
associated inventory must be identified by monitoring the stream of RFID tag
readings seen by the mobile reader. This must be accomplished robustly despite
delivery complexities such as moving stacks of racks where not all of the moved
racks will be seen by the reader during the entirety of the delivery event.
References
1. Thiesse, F., Fleisch, E.: On the Value of Location Information to Lot Scheduling in
Complex Manufacturing Processes, Int. Journal of Production Economics, Vol. 112, 2008,
pp. 532-547.
2. Jones, E.C., Chung, C.A.: RFID in Logistics: A Practical Introduction, CRC Press, 2008.
3. Sanpechuda, T., Kovavisaruch, L.: A review of RFID localization: Applications and
Techniques, Proceedings of 5th International Conference on Electrical
Engineering/Electronics, Computer, Telecommunications and Information Technology
ECTI-CON 2008, pp. 769 – 772.
128

4. Jungk, A., Heiserich, G., Overmeyer, L.: Forklift Trucks as Mobile Radio Frequency
Identification Antenna Gates in Material Flow, Proceeding of Conference on Intelligent
Transportation Systems, 2007, pp. 940 – 943.
5. Michel, J. C. F., Millner, H., Vossiek, M.: A Novell Wireless Forklift Positioning System
for Indoor and Outdoor Use, 5th Workshop on Positioning, Navigation and Communication
2008 (WPNC’08), Hannover, Germany, March 2008, pp. 219-227.
6. Röhrig, C., Spieker, S.: Tracking of Transport Vehicles for Warehouse Management using
a Wireless Sensor Network, Proceedings of IEEE/RSJ International Conference on
Intelligent Robots and Systems, Nice, France, September 22-26, 2008, pp. 3260-3265.
7. Borenstein, J., Everett, B., Feng, L.: Navigating Mobile Robots: Systems and Techniques,
A. K. Peters, Ltd., Wellesley, MA, 1996.
8. Hu H., Gu D.: Landmark-based Navigation of Industrial Mobile Robots, International
Journal of Industry Robot, Vol. 27, No. 6, 2000, pp. 458 – 467.
9. Yoon, K.-J., Kweon, I. S., Lee, C.-H., Oh, J.-K., Yeo, I.-T.: Landmark Design and Real-
Time Landmark Tracking Using Color Histogram for Mobile Robot Localization,
International Symposium on Robotics (ISR), 2001, pp. 1083-1088.
10. Lee, S., Song, J.-B.: Use of coded infrared light as artificial landmarks for mobile robot
localization, Proceeding of International Conference on Intelligent Robots and Systems,
2007, pp. 1731-1736.
11. Hahnel, D., Burgard, W., Fox, D., Fishkin, K., Philipose, M.: Mapping and Localization
with RFID Technology, Proceedings of ICRA 2004, pp. 1015-1020.
12. Schneegans, S., Vorst, P., Zell, A.: Using RFID Snapshots for Mobile Robot Self-
Localization, Proceedings of the 3rd European Conference on Mobile Robots (ECMR
2007), Freiburg, Germany, 2007, pp. 241-246.
13. Yang, P., Wenyan, W., Moniri, M., Chibelushi, C.C.: SLAM Algorithm for 2D Object
Trajectory Tracking based on RFID Passive Tags, Proceeding of 2008 IEEE International
Conference on RFID, 2008, pp.165 – 172.
14. Santana, A.M., Sousa, A. S., Britto, R.S., Alsina, P.J., Medeiros, A.D.: Localization of a
Mobile Robot Based in Odometry and Natural Landmarks Using Extended Kalman Filter,
Proceedings of 5
th
International Conference on Informatics in Control, Automation and
Robotics, 2008, pp. 187-193.
15. Thrun, S., Fox, D., Burgard, W., Dellaert, F.: Robust Monte Carlo Localization for Mobile
Robots, Artificial Intelligence, Vol. 128, 2001, pp. 99-141.
16. Demirli, K., Molhim, M.: Fuzzy dynamic localization for mobile robots, Fuzzy Sets and
Systems, Vol. 144, 2004, pp. 251–283.
129
