
AN ADAPTIVE SWARM-BASED ALGORITHM FOR RESOURCE
ALLOCATION IN DYNAMIC ENVIRONMENTS
Tony White, Amirali Salehi-Abari and Gayan Abeysundara
School of Computer Science, Carleton University, Ottawa, Canada
Keywords:
Swarm Intelligence, Task Allocation.
Abstract:
Dynamic allocation of agents to a set of tasks is a hard problem. Furthermore, having too few or too many
agents can result in poor task completion owing to conflicting agent decisions thus creating the problem of
the Tragedy of the Commons. This paper proposes a swarm-based algorithm inspired by the social behavior
of ants that causes agent specialization to a particular task – resource allocation in a spatial region – and
determines the near optimal number of agents required to complete the tasks presented. The utility of the
algorithm is demonstrated by application to the dynamic allocation of frequencies in a cellular network.
1 INTRODUCTION
The principal components in a system employing
swarm intelligence are the agents and the environment
being controlled. Each agent follows a simple set of
rules designed for the environment being controlled.
Agents interact with each other locally and the envi-
ronment to determine its course of action. Each agent
has only partial information about the environment
and is unaware of what the entire swarm is doing,
leading to no overall global evaluation. However, as
a result of the overall swarm behavior from each and
every agent intertwined with each other, the system
self-organizes to produce an efficient working entity
(Bonabeau et al., 1999).
Cell networks are an example of a hard control
problem where cell frequencies represent limited re-
sources that can be allocated to consumers (callers)
using the network. Callers use the frequencies avail-
able within a cell to make calls and change the fre-
quencies that they use as they move from one cell
to another. It is the position of this paper that a
swarm-based control system can efficiently allocate
such limited resources. As such, in the control prob-
lem described in this paper, agents distribute the lim-
ited number of cellular frequencies among the cells to
accommodate network fluctuations and areas of high
frequency utilization.
The specific strategy used in the proposed agent-
based solution is referred to as division of labor and
recruitment. Over time, agents in the system estab-
lish a routine, or pattern, to efficiently divide the to-
tal workload, or stimulus, among the agent popula-
tion. Furthermore, this is accomplished by using dy-
namic response thresholds that change depending on
demand. Cells that are in high demand and low on
resources stimulate agents until one agent responds.
Each stimulated agent determines if it will respond to
the cell depending on its response threshold and la-
tency (or think time) considerations. Each agent has
a unique response threshold for each cell in the net-
work. There is an indirect transfer of information be-
tween agents, or so-called stigmergy, because when
an agent responds to a cell in need it changes the en-
vironment by decreasing that stimulus for others.
In designing a swarm system based upon division
of labor and recruitment, two problems need to be
solved. First, an algorithm for redeployment of re-
sources in the environment needs to be created. Sec-
ond, an algorithm for dynamically adjusting the num-
ber of agents involved in the redeployment process
is required. Without the latter, a shortfall of agents
can cause the system to react too slowly to changes
in demand; however, with too many agents, agent de-
cision making can cause conflicts leading to unsatis-
factory oscillatory resource allocation. The need for
these two algorithms motivates the work reported in
this paper.
The paper proceeds as follows. Section 2 de-
scribes the resource allocation algorithms that solve
the two questions highlighted in the previous para-
graph. Section 3 provides a brief description of the
183
White T., Salehi-Abari A. and Abeysundara G. (2009).
AN ADAPTIVE SWARM-BASED ALGORITHM FOR RESOURCE ALLOCATION IN DYNAMIC ENVIRONMENTS.
In Proceedings of the International Joint Conference on Computational Intelligence, pages 183-188
DOI: 10.5220/0002285601830188
Copyright
c
SciTePress

dynamic frequency assignment problem, highlighting
call models. Sections 4 and 5 describe experimental
setup and results respectively, while Section 5 shows
results for the call models introduced in Section 3.
Section 6 discusses the results highlighting the suc-
cess of the Dynamic Agent Population algorithm. Fi-
nally, Section 8 summarizes the key messages of the
paper and indicates potential future research direc-
tions.
2 ALGORITHMS
There are two distinct algorithms for resource alloca-
tion described in this paper. The first relates to divi-
sion of labor: making agents specialize in particular
locations in the environment. The second is related
to the size of the agent population itself. These algo-
rithms are described in the next two subsections.
2.1 Division of Labor
The division of labor model consists of a set of
decision-making agents, a
i
, responding to a set of
stimulii, S
j
, moving within an environment, E, con-
sisting of a collection of N cells of a giventopology,T.
The N cells contain resources, R
n
. The total number
of resources present within the environment is con-
stant. Resources may be reallocated to cells by agents
based upon a set of constraints, C
n
. Agents may be
in the idle, thinking or working states. When in the
thinking or working states an agent is responding to
a stimulus in a specific cell, l. When responding to
a stimulus to reallocate resources, an agent, a, first
thinks about the decision to reallocate resources avail-
able within the target cell and neighborhood. It does
this in order to ensure that resource reallocation does
not occur too quickly in the network potentially caus-
ing instability. When the agent thinking time expires,
it enters the working state and it executes a realloca-
tion algorithm, A
i
, which may cause resources to be
moved from neighboring cells to the target cell. The
reallocation algorithm terminates when resources are
reallocated which results in lowering the stimulus be-
low a threshold, Thd, or a timeout, T, occurs. When
the algorithm terminates, the agent reenters the idle
state.
Adaptive task allocation consists of agents adapt-
ing and learning to perform certain tasks of the overall
stimulus. Each agent, a, maintains a set of response
thresholds, θ
aj
, for each cell, j, in the environment.
The system adapts by changing response thresholds
depending on cell stimulation. If an agent responds
to a cell in demand, it will lower its threshold for that
cell by ξ
0
and its neighboring cells by ξ
1
, and increas-
ing its threshold for all other cells by ϕ. Therefore,
agents are able to specialize in particular areas of the
grid where they have done more work, and have lower
response thresholds. As demand patterns are not com-
pletely random – where they follow some sort of pat-
tern or trend over time – agents specializing in areas
of the environment produces a flexible system that can
adapt to changing conditions. Agents satisfy demands
(reduce stimulus) by moving resources around among
neighboring cells subject to the aforementioned con-
straints.
When a cell experiences high resource usage it
broadcasts a message to all available agents, stimu-
lating each one. The probability that an idle agent a
located in cell cell(a) responds to a stimulus from cell
j is:
P
aj
=
S
2
j
S
2
j
+ αθ
2
aj
+ βthink
2
cell(a) j
(1)
Where S
j
is the amount of demand or stimulus
from cell j, θ
aj
is the response threshold of agent a
for cell j, think
cell(a) j
is the thinking time for agent
a and cell j, and α and β are two positive coefficients
that weight the influences of θ and d respectively. The
thinking time is a function of the rate of change of uti-
lization of resources in the cell. An agent in the think-
ing state may respond to a stimulus in a neighboring
cell. Several agents may respond to the stimulus, the
cell randomly selects from those responding; the oth-
ers are ignored. If an agent a in the idle state responds
to a stimulus from cell j, it updates its response thresh-
olds in the following way:
θ
aj
← θ
aj
− ξ
0
(2)
θ
an( j)
← θ
an( j)
− ξ
1
, for ∀n( j) (3)
θ
ak
← θ
ak
+ ϕ, for ∀k 6= j and k /∈ {n( j)} (4)
Where n( j) is the set of neighboring cells to cell
j, ξ
0
and ξ
1
are two system-wide learning coefficients
corresponding to cell j and its neighbors respectively,
and ϕ is the forgetting coefficient for all other cells
in the environment. Once an agent has received the
acknowledgment to take on the task it changes its
state to thinking and begins to decrement its think-
ing time timer. When the timer expires, the agent
changes state to working and executes its resource
allocation algorithm, A
i
. The resource allocation al-
gorithm for the cell network problem is described in
Section 3.2. Equations 2, 3 and 4 are motivated by
(Theraulaz et al., 1990; Bonabeau et al., 1998); the
thinking time term being the difference.
IJCCI 2009 - International Joint Conference on Computational Intelligence
184

2.2 Dynamic Agent Population
The Dynamic Agent Population (DAP) algorithm is
based upon agent response thresholds. At every clock
tick, each agent will calculate its average response
threshold (represented by the avgθ function in the Dy-
namic Agent Population Algorithm). If the average
response threshold of an idle agent (represented by
the isIdle function) is below a minimum threshold
value, Th
min
, indicating the agent is not being used,
it will remove itself from the system. If an agent, in
any state, has an average response threshold above a
certain value, Th
max
, it will spawn a new agent, or
duplicate itself. The new agent will be located in the
same cell as the original. Values for Th
max
and Th
min
are in the range of [0,100]. According to Equations 2,
3 and 4, agent response thresholds only change when
an agent moves from the idle to the thinking state.
Therefore, an agent that is never stimulated continues
to have the same response threshold that it was ini-
tialized with, θ
initial
. In order to provide for agent ter-
mination, all agents have all of their response thresh-
olds decay by δ at every time tick. So, over a period
of time, an agent remaining in the idle state in a low-
demand environment will reduce its average threshold
until it terminates itself.
Algorithm 1: Dynamic Agent Population Algorithm.
1: for all agents a do
2: if a.isIdle then
3: for j = 1 to N do
4: θ
aj
← θ
aj
× (1− δ)
5: end for
6: end if
7: if a.avgθ < Th
min
then
8: remove a
9: end if
10: if a.avgθ > Th
max
then
11: create new agent a
′
at location of agent a
12: provide a
′
with θ
initial
response thresholds
13: end if
14: end for
When the Dynamic Agent Population Algorithm,
as presented in Algorithm 1, is used, the initial agent
population is set to 1; agents are rapidly created
as the single agent quickly becomes overwhelmed
responding to stimuli. Experiments were undertaken
with varying initial population sizes, however the
population converged to the same size given a
sufficient time.
3 DYNAMIC FREQUENCY
ASSIGNMENT
A cellular network consists of many cells. In order
to make a cellular call, a caller must be allocated a
channel within a particular cell. Each cell has a finite
number of channels to allocate, once exhausted new
calls are either blocked or existing calls are dropped
as the caller moves from one cell to another, releas-
ing one channel and acquiring another. Channel as-
signment is hard in that the frequencies required for
a channel cannot be reused in adjacent cells owing
to interference. In order to make a call, a channel
is needed. A channel is composed of the three fre-
quencies required for communication. In this paper
we use the words channel and frequency interchange-
ably, which is a significant simplification. Calls are
generated depending on a user specified call genera-
tion rate. The call generation rate, or call rate, does
not give the number of calls per second, but only pro-
vides an upper bound on the number of call that can
be generated in a second. The actual number of calls
per second is a random number uniformly distributed
between zero and the call rate. A newly generated
call is positioned on the grid according to a hotspot
algorithm – explained in sections 3.1.1-3.1.3. The
hotspot algorithm also determines the call direction.
The holding time of a call and its velocity in the net-
work are randomly determined. Handoffs occur when
a call moves from one cell to another, and a suitable
channel is allocated in the new cell.
3.1 Call Models
To depict realistic situations in the cellular simulation,
multiple call models were created. They are: Down-
town, Centre Hotspot, and Random Hotspot.
3.1.1 Downtown
The Downtown call model represents a simplified ver-
sion of a typical workday in a city. The call model
consists of four cycles, each lasting an equal amount
of time. The first cycle represents the morning, where
people are moving into the city centre. Calls in this
cycle have a direction toward the centre, and have a
random call location that is partially centre-oriented;
i.e., directed towards the city centre. The second cycle
represents the working afternoon, where most people
are densely populated in the centre of a city. In this
cycle, calls are generated in the centre and have a ran-
dom direction. The third cycle represents the end of
day where people are traveling back home. The cycle
generates calls with an outward direction and a loca-
AN ADAPTIVE SWARM-BASED ALGORITHM FOR RESOURCE ALLOCATION IN DYNAMIC ENVIRONMENTS
185
tion that is partially centre-oriented. The last cycle of
the Downtown call model represents the evening, with
no clear pattern or trend.
3.1.2 Centre Hotspot
The Centre Hotspot call model represented by two cy-
cles. The first generates calls with a random location
and direction. The second cycle generates calls that
are densely populated in the centre, with an inward
moving direction.
3.1.3 Random Hotspot
This call model is very similar to the Centre Hotspot,
but the hotspot location is randomly determined in-
stead of centre-oriented.
3.2 Resource Allocation Algorithm
In the application of the algorithms in Section 2, the
resources to be reallocated are now frequencies. The
reallocation algorithm, A
i
, for dynamic frequency al-
location is presented in Algorithm 2.
Algorithm 2: Reallocation Algorithm(agent).
1: if agent.cell.demand < Thd then
2: Set agent state to idle
3: else
4: for all cell j ∈ agent.cell.neighbors do
5: if cell j has unused resources > DR
min
then
6: while cell j has more frequencies do
7: if next available frequency, freq, is not
used in agent.cell and its other neigh-
bors then
8: transfer freq to agent.cell
9: return
10: end if
11: end while
12: end if
13: end for
14: end if
The DR
min
value is included in the algorithm in
order to ensure that a neighborhood cell will always
retain a minimum number of resources. The reallo-
cation algorithm is executed once per time tick and
may execute a maximum of T times before the agent
is forced to return to the idle state. This ensures two
things. First, an agent can move frequencies over sev-
eral time ticks and second, an agent will not get stuck
in a cell indefinitely trying to reallocate frequencies.
Frequencies are moved one at a time in order to en-
sure that agents working in adjacent or nearby cells
can effectively share available frequency resources.
4 EXPERIMENTAL SETUP
In the experiments that were conducted, the param-
eters shown in Table 1 were common to all runs.
Experimental sets of 50 runs were conducted for
each of the call models described in sections 3.1.1 to
3.1.3 with the Dynamic Agent Population algorithm
(Algorithm 1) switched on and off. With the Dy-
namic Agent Population (DAP) algorithm switched
off, agent populations were run for values of 0, 1, 5,
10, 15, 20, 25, 30, 35, and 40 agents. A population of
zero agents was included as a control case implying
static allocation of frequencies.
The mean call holding time was 180 seconds with
a distribution between 5 and 1500 seconds. Call
velocity was uniformly distributed between 0 and
0.02 cells/second, implying that approximately3 cells
would be traversed in an average call. Experiments
were conducted with an average call generation rate
of 3/second up to 10/second. Each simulation was
run for 12,000 seconds, and results averaged over all
runs.
Table 1: Experimental Parameters.
Variable Value
Th
min
1%
Th
max
80%
N 100
R 10 frequencies per cell
θ
initial
50
Thd 65%
DR
min
5
T 30
δ 0.05
α 0.5
β 50
ξ
0
15
ξ
1
7
ϕ 0.5
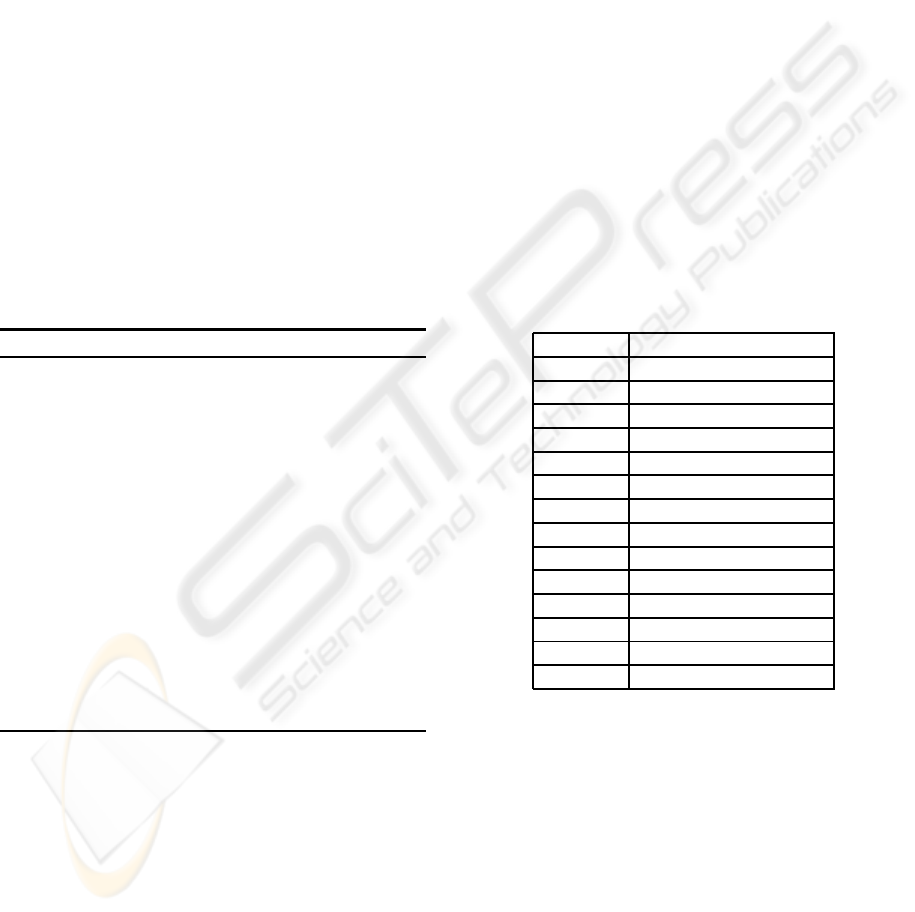
5 RESULTS
The simulation results are shown in the following
graphs, grouped by the call model used. Each graph
shows the relationship between the number of agents
used (horizontal axis) and the percentage of calls
blocked (vertical axis). Each graph contains a star that
represents the results of the DAP algorithm. The point
of intersection depicted by the star represents the final
number of agents at the end of the simulation and the
percentage of calls blocked.
IJCCI 2009 - International Joint Conference on Computational Intelligence
186
5.1 Downtown Model
Figure 1: Downtown Model: Call Rate of 10.
Figure 1 shows the variation of call blocking percent-
age with number of agents for the Downtown model.
As more agents were added to the system, the percent-
age of calls started to level off into a plateau. The only
non-monotonic behaviour seen was when one agent
supported the network. Furthermore, as the call rate
increased, the fluctuation grew larger (not shown).
This is nothing to be concerned about since one agent
is not considered a swarm and should not necessar-
ily produce better results. In the situations where the
lone agent produced worse results, the cause is due to
an agent moving frequencies from a cell into which
active callers are just about to move, thereby causing
a blocked handoff. It could also be possible that with
such high call rates, the agent was shuffling channels
in a way that caused more calls to be blocked. Con-
sidering the above call rates of five to ten calls per
second, the agent-based solution reduced the number
of calls blocked by 69% = 1-(1.91/6.3) to 71% = 1-
(3.89/13.47). The DAP algorithm converged on the
optimal number of agents that produced the lowest
call blocking rate. The number of calls blocked was
reduced by an average of 67% using dynamic agents.
The adaptive population neither affects the number of
completed calls nor the number of handoffs.
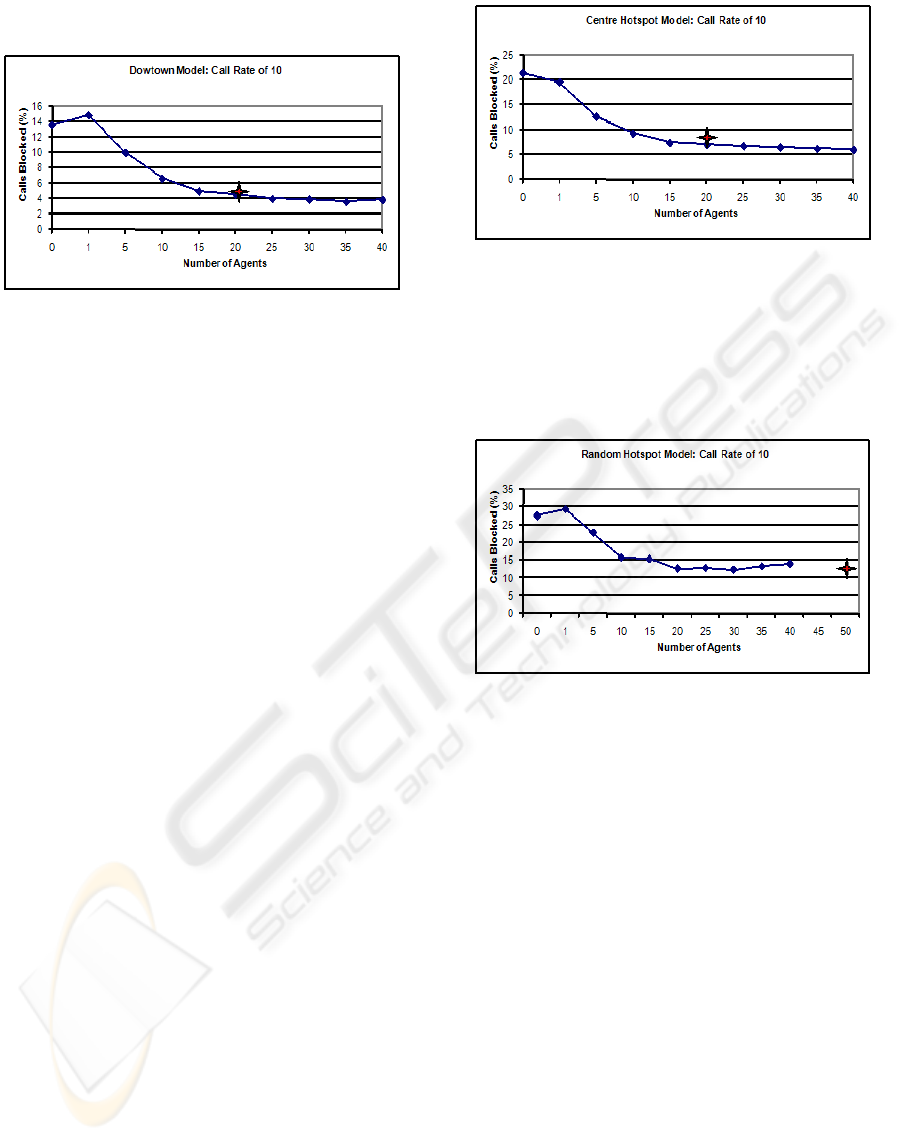
5.2 Centre Hotspot Call Model
Figure 2 shows the variation of call blocking percent-
age with the number of agents for the Centre Hotspot
model.
All scenarios with one agent showed a lower
number of blocked calls than the agent-less system.
One other interesting discovery of this call model
is how uniform the graphs are when compared with
the Downtown model. This is most likely because
there are fewer cycles than the Downtown model, and
gave the agents more time to adapt and settle into
the predictable pattern. Simulations with the Centre
Figure 2: Centre Hotspot Call Model: Call Rate of 10.
Hotspot model produced a 71% - 82% reduction in
calls blocked.
5.3 Random Hotspot Call Model
Figure 3: Random Hotspot Model: Call Rate of 10.
Figure 3 shows the variation of call blocking per-
centage with the number of agents for the Random
Hotspot model. Adding agents in the network did
lower the call blocking rate until it leveled off, but
there were more fluctuations. This is mainly be-
cause the hotspot was always in a random location
every cycle. The agents were unable to adapt to net-
work conditions as easily as the other two centre-
oriented call models. Consequently,more fluctuations
in the results should be expected. Agents in this call
model reduced the number of calls blocked by 55%
- 77%. When using DAP, it sometimes resulted in
more agents in the system than required. However,
DAP did result in a call blocking rate that was close to
the minimum that was obtained using a fixed number
of agents. We hypothesize that the random hotspots
produced a high demand for agents that resulted in
higher agent populations, but did not result in better
call rates simply because the network is too stressed
and could not be relieved by extra channel shuffling.
Using DAP, the call blocking rate was reduced by an
average of 62%.
AN ADAPTIVE SWARM-BASED ALGORITHM FOR RESOURCE ALLOCATION IN DYNAMIC ENVIRONMENTS
187

6 DISCUSSION
We can conclude that adding agents to the cellular
network produced better call rates under all condi-
tions. Agents self-organize to reduce the percentage
of calls blocked significantly. Considering all call
models, agents were able to reduce the number of
calls blocked by 55% - 82%. On average, the agent-
based solution decreased the number of calls blocked
by a remarkable 72%. Call generation rate had no ef-
fect on the qualitative results. With a high call rate of
10, when one assumes the network may be too over-
loaded to have any affect, the addition of agents al-
ways improved network performance. Another inter-
esting fact was when the simulation results attained
the minimum call blocking rate, the addition of more
agents did not overload the system but continued to
produce the same performance results. Although the
Random Hotspot model generated more fluctuations,
the agents adapted efficiently to the continuous flow
of random network hotspots.
The DAP algorithm was extremely good, produc-
ing call rates that were as good as any of the fixed
agent methods. It managed to adapt to a minimal
number of agents under most situations, with the ex-
ception of the Random Hotspot were slightly more
agents were utilized. Even so, call rate results were
not affected. An average reduction in blocked calls
in excess of 62% was achieved using the DAP algo-
rithm, considering all call models and call rates; a sta-
tistically significant difference.
7 RELATED WORK
Al agha (Al agha, 2000) proposes a multi-agent so-
lution for intelligent base stations resource allocation
in wireless networks. Agents are able to combine
knowledge and experience with neighboring agents to
make the best decisions. This is achieved by agents
cooperating, communicating, reasoning, and perceiv-
ing. Agents corresponding with a base station are
capable of communicating its state to neighbors and
learning from past events in the environment to opti-
mize the utilization of resources. The agent solution is
used in conjunction with a resource allocation scheme
known as Channel Segregation (CS). Channel Seg-
regation differs from traditional dynamic allocation
schemes because it has a simple form of self-learning.
It involves segregating physical channels from a com-
mon pool by each base station to form a preferred list
of channels. Base stations attempt to allocate chan-
nels at the top of their priority list. The learning as-
pect of CS is achieved though the way in which prior-
ity lists are formed, resulting in differing lists across
the network cells - and stabilizing over time. Simu-
lation results have shown that the integration of intel-
ligent agents with channel segregation had improved
call rates by decreasing the number of calls blocked.
An overview of research done in the field of both
Communication Networks (CN) and Distributed Arti-
ficial Intelligence (DAI) can be found in (Hayzelden
and Bigham, 1999). Articles in (Hayzelden and
Bigham, 1999) identify current trends in agent-based
network control and management. They discuss ar-
eas that would most benefit from agent technologies
and deployment strategies for agent-based solutions,
some of which are ant-based.
8 CONCLUSIONS
This paper has demonstrated that an adaptive popu-
lation of agents using principles from swarm intelli-
gence can effectively allocate resources in a dynamic
environment.
The resizing algorithm can be thought of as a re-
cruitment algorithm.
Using division of labor and adaptive task alloca-
tion, agents modeled after social insects produced a
decentralized, robust, and adaptive system. The sim-
ple interconnected agents were able to self-organize
and exhibit intelligent behavior to dramatically de-
crease blocked call rates.
We propose that future work should include agent-
to-agent communication. This may be accomplished
by agents simulating other agents, or cooperative ne-
gotiation between agents. The latter possibility was
a proposed solution by Bigham, where agents asso-
ciated with the cellular base station would negotiate
with other agents to optimize local cell coverage (Du
et al., 2003).
REFERENCES
Al agha, K. M. (2000). Resource management in wire-
less networks using intelligent agents. Int. J. Netw.
Manag., 10(1):29–39.
Bonabeau, E., Dorigo, M., and Theraulaz, G. (1999).
Swarm Intelligence: From Natural to Artificial Sys-
tems. Oxford.
Bonabeau, E., Theraulaz, G., and Deneubourg, J.-L. (1998).
Fixed response thresholds and the regulation of divi-
sion of labor in insect societies. Working Papers 98-
01-009, Santa Fe Institute.
Du, L., Bigham, J., Cuthbert, L., Nahi, P., and Parini, C.
(2003). Intelligent cellular network load balancing
IJCCI 2009 - International Joint Conference on Computational Intelligence
188

using a cooperative negotiation approach. volume 3,
pages 1675–1679 vol.3.
Hayzelden, A. L. and Bigham, J., editors (1999). Software
Agents for Future Communication Systems. Springer-
Verlag New York, Inc., Secaucus, NJ, USA.
Theraulaz, G., Goss, S., Gervet, J., and Deneubourg, J.-L.
(1990). Task differentiation in polistes wasp colonies:
a model for self-organizing groups of robots. In Pro-
ceedings of the first international conference on sim-
ulation of adaptive behavior on From animals to an-
imats, pages 346–355, Cambridge, MA, USA. MIT
Press.
AN ADAPTIVE SWARM-BASED ALGORITHM FOR RESOURCE ALLOCATION IN DYNAMIC ENVIRONMENTS
189
