
CHAIN
EVENT GRAPH MAP MODEL SELECTION
Peter A. Thwaites, Guy Freeman and Jim Q. Smith
Department of Statistics, University of Warwick, Coventry, U.K.
Keywords:
Bayesian network, Chain event graph, Conjugate learning, Maximum a posteriori model.
Abstract:
When looking for general structure from a finite discrete data set one can search over the class of Bayesian
Networks (BNs). The class of Chain Event Graph (CEG) models is however much more expressive and is
particularly suited to depicting hypotheses about how situations might unfold. Like the BN, the CEG admits
conjugate learning on its conditional probability parameters using product Dirichlet priors. The Bayes Factors
associated with different CEG models can therefore be calculated in an explicit closed form, which means that
search for the maximum a posteriori (MAP) model in this class can be enacted by evaluating the score function
of successive models and optimizing. Local search algorithms can be devised for the class of candidate models,
but in this paper we concentrate on the process of scoring the members of this class.
1 INTRODUCTION
The Chain Event Graph (CEG), introduced in (Smith
and Anderson, 2008; Thwaites et al., 2008; Smith
et al., 2009), is a graphical model specifically de-
signed to represent an analyst’s knowledge of the
structure of problems whose state spaces are highly
asymmetric and do not admit a natural product struc-
ture. There are many scenarios in medicine, biol-
ogy and education where such asymmetries arise nat-
urally, and where the main features of the model class
cannot be fully captured by a single BN or even a con-
text specific BN. A key property of the CEG frame-
work is that these graphical models are qualitative in
their topologies – they encode sets of conditional in-
dependence statements about how things might hap-
pen, without prespecifying the probabilities associ-
ated with these events. Each CEG model can there-
fore be identified with a unique explanation of how
situations might unfold.
The CEG is an event-based (rather than variable-
based) graphical model, and is a function of an event
tree. Any problem on a finite discrete data set can
be modelled using an event tree, but they are particu-
larly suited to problems with asymmetric state spaces.
Unfortunately, it is almost impossible to read the con-
ditional independence properties of a model from an
event tree representation, as only trivial independen-
cies are expressed within its topology. The CEG el-
egantly solves this problem, encoding a rich class of
conditional independence statements through its edge
and vertex structure.
So consider an event tree T with vertex set V (T ),
directed edge set E(T ), and S(T ) ⊂ V (T ), the set
of the tree’s non-leaf vertices or situations (Shafer,
1996)). A probability tree can then be specified by
a transition matrix on V (T ), where absorbing states
correspond to leaf-vertices. Transition probabilities
are zero except for transitions to a situation’s children
(see Table 1).
Let T (v) be the subtree rooted in the situation v
which contains all vertices after v in T . We say that
v
1
and v
2
are in the same position if:
• the trees T (v
1
) and T (v
2
) are topologically iden-
tical,
• there is a map between T (v
1
) and T (v
2
) such that
the edges in T (v
2
) are labelled, under this map, by
the same probabilities as the corresponding edges
in T (v
1
).
Table 1: Part of the transition matrix for Example 1.
v
1
v
2
v
3
v
4
v
5
v
6
. . . v
1
∞
v
2
∞
. . .
v
0
θ
1
θ
2
θ
3
0 0 0 . . . 0 0 . . .
v
1
0 0 0 θ
5
0 0 . . . θ
4
0 . . .
v
2
0 0 0 0 θ
4
θ
5
. . . 0 0 . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
392
Thwaites P., Freeman G. and Smith J. (2009).
CHAIN EVENT GRAPH MAP MODEL SELECTION.
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development, pages 392-395
DOI: 10.5220/0002292403920395
Copyright
c
SciTePress
The set W(T ) of positions w partitions S(T ). The
transporter CEG (Thwaites et al., 2008) is a di-
rected graph with vertices W(T ) ∪ {w
∞
}, with an
an edge e from w
1
to w
2
6= w
∞
for each situation
v
2
∈ w
2
which is a child of a fixed representative
v
1
∈ w
1
for some v
1
∈ S(T ), and an edge from w
1
to w
∞
for each leaf-node v ∈ V (T ) which is a child of
some fixed representative v
1
∈ w
1
for some v
1
∈ S(T ).
For the position w in our transporter CEG, we de-
fine the floret F(w) to be w together with the set of
outgoing edges from w. We say that w
1
and w
2
are in
the same stage if:
• the florets F(w
1
) and F(w
2
) are topologically
identical,
• there is a map between F(w
1
) and F(w
2
) such
that the edges in F(w
2
) are labelled, under this
map, by the same probabilities as the correspond-
ing edges in F(w
1
).
The CEG C(T ) is then a mixed graph with ver-
tex set W (C) equal to the vertex set of the transporter
CEG, directed edge set E
d
(C) equal to the edge set of
the transporter CEG, and undirected edge set E
u
(C)
consisting of edges which connect the component po-
sitions of each stage u ∈ U(C), the set of stages. The
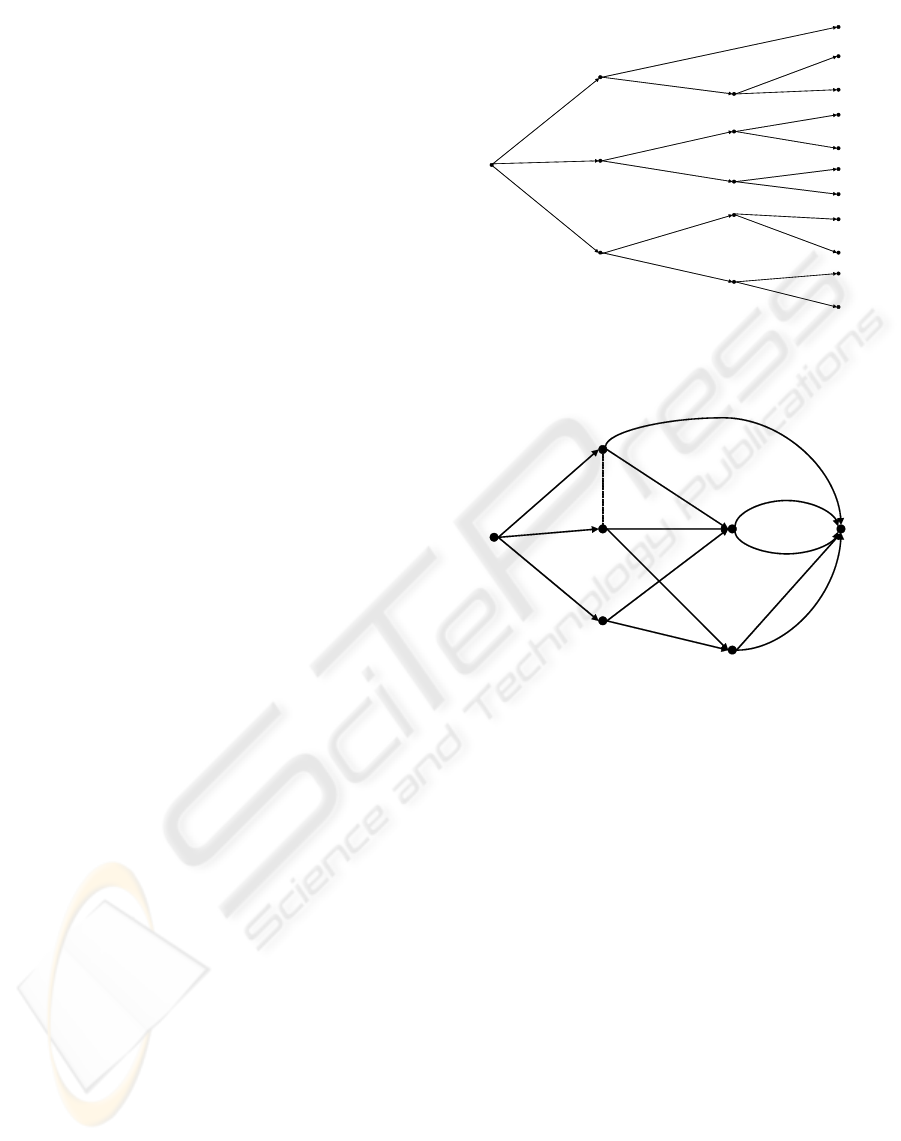
CEG-construction process is illustrated in Example 1,
and an example CEG in Figure 2.
Example 1
Consider the tree in Figure 1 which has 11 atoms
(root-to-leaf paths). Symmetries in the tree allow us
to store the distribution in 5 conditional tables which
contain 11 (6 free) probabilities. The transporter CEG
is produced by combining the vertices {v
4
, v
5
, v
7
} into
one position w
4
, the vertices {v
6
, v
8
} into one position
w
5
, and all leaf-nodes into a single sink-node w
∞
. The
CEG C (Figure 2) has an undirected edge connecting
the positions w
1
and w
2
as these lie in the same stage –
their florets are topologically identical, and the edges
of these florets carry the same probabilities.
2 LEARNING CEGs
As the CEG can express a richer class of conditional
independence structures than the BN, CEG model se-
lection allows for the automatic identification of more
subtle features of the data generating process than it
would be possible to express (and therefore to evalu-
ate) through the class of BNs. In this section we intro-
duce the techniques for learning CEGs and compare
them with those for learning BNs.
v
0
v
inf
1
v
inf
2
v
1
v
2
v
3
v
4
v
5
v
6
v
7
v
8
θ
1
θ
2
θ
3
θ
4
θ
5
θ
4
θ
5
θ
6
θ
7
θ
8
θ
9
θ
8
θ
9
θ
10
θ
11
θ
8
θ
9
θ
10
θ
11
Figure 1: Tree for Example 1.
w
0
w
inf
w
1
w
2
w
3
w
4
w
5
θ
1
θ
2
θ
3
θ
4
θ
5
θ
4
θ
5
θ
6
θ
7
θ
8
θ
9
θ
10
θ
11
Figure 2: CEG for Example 1.
From our CEG definition, if w
1
, w
2
∈ u for some u,
then the corresponding edges in the florets F(w
1
)
and F(w
2
) carry the same probabilities. So, for
each member u of the set of stages prescribed by the
model under consideration for our CEG, we can la-
bel the edges leaving u by their probabilities under
this model. We can then let x
un
be the total number
of sample units passing through an edge labelled π
un
;
and the likelihood L(π
π
π) for our CEG model is given
by
L(π
π
π) =
∏
u
∏
n
π
un
x
un
For BNs, the assumptions of local and global in-
dependence, and the use of Dirichlet priors ensures
conjugacy. The analogue for CEGs is to give the vec-
tors of probabilities associated with the stages inde-
pendent Dirichlet distributions. Then the structure of
the likelihood L(π
π
π) results in prior and posterior dis-
tributions for the CEG model which are products of
Dirichlet densities. The result of this conjugacy is
CHAIN EVENT GRAPH MAP MODEL SELECTION
393

that the marginal likelihood of each CEG is therefore
the product of the marginal likelihoods of its compo-
nent florets. Explicitly, the marginal likelihood of a
CEG C is
∏
u
Γ(
∑
n
α
un
)
Γ(
∑
n
(α
un
+ x
un
))
∏
n
Γ(α
un
+ x
un
)
Γ(α
un
)
where, as above
• u indexes the stages of C
• n indexes the outgoing edges of each stage
• α
un
are the exponents of our Dirichlet priors
• x
un
are the data counts
As we are actually interested in p(model | data),
and this is proportional to p(data | model) ×
p(model), we need to set both parameter priors and
prior probabilities for the possible models.
Exactly analogously with BNs, parameter modu-
larity in CEGs implies that whenever CEG models
share some aspect of their topology, we assign this as-
pect the same prior distribution in each model. When
such priors reflect our beliefs in a given context, this
can reduce our problem dramatically to one of sim-
ply expressing prior beliefs about the possible floret
distributions (ie. the local differences in model struc-
ture). As each CEG model is essentially a partition of
the vertices in the underlying tree into sets of stages,
this requirement ensures that when two partitions dif-
fer only in whether or not some subset of vertices be-
long to the same stage, the prior expressions for the
models differ only in the term relating to this stage.
The separation of the likelihood means that this local
difference property is retained in the posterior distri-
bution.
Now, our candidate set is much richer than the
corresponding candidate BN set, and will probably
contain models we have not previously considered in
our analysis. Again, evoking modularity, if we have
no information to suggest otherwise, we follow stan-
dard BN practice and let p(model) be constant for all
models in the class of CEGs. We now use the loga-
rithm of the marginal likelihood of a CEG model as
its score, and maximise this score over our set of can-
didate models to find the MAP model.
Our expression has the nice property that the
difference in score between two models which are
identical except for a particular subset of florets, is
a function of the subscores only of the probabil-
ity tables on the florets where they differ. Vari-
ous fast deterministic and stochastic algorithms can
therefore be derived to search over the model space,
even when this is large – see (Freeman and Smith,
2009). This property is of course shared by the class
of BNs.
We set the priors of the hyperparameters so that
they correspond to counts of dummy units through the
graph. This can be done by setting a Dirichlet distri-
bution on the root-to-sink paths, and for simplicity we
choose a uniform distribution for this. It is then easy
to check that in the special case where the CEG is ex-
pressible as a BN, the CEG score above is equal to the
standard score for a BN using the usual prior settings
as recommended in, for example, (Cooper and Her-
skovits, 1992; Heckerman et al., 1995). As a compar-
ison with our CEG-expression; given Dirichlet priors
and a multivariate likelihood, the marginal likelihood
on a BN is expressible as
∏
i∈V
"
∏
m
Γ(
∑
n
α
imn
)
Γ(
∑
n
(α
imn
+ x
imn
))
∏
n
Γ(α
imn
+ x
imn
)
Γ(α
imn
)
#
where
• i indexes the set of variables of the BN
• n indexes the levels of the variable X
i
• m indexes vectors of levels of the parental vari-
ables of X
i
The importance of this result is that were we first
to search the space of BNs for the MAP model, then
we could seamlessly refine this model using the CEG
search score described above. Such embellishments
will allow us to search over models containing signif-
icant amounts of context specific information. Fur-
thermore any model we find will have an associated
interpretation which can be stated in common lan-
guage, and can be discussed and critiqued by our
client/expert for its phenomenological plausibility.
Example 1 Continued
For the CEG in Figure 2, we put a uniform prior
over the 11 root-to-leaf paths, which in turn allows
us to assign our stage priors as follows: we assign
a Di(3, 4, 4) prior to the stage identified by w
0
, a
Di(3, 4) prior to the stage u
1
≡ (w
1
, w
2
), a Di(2, 2)
prior to each of the stages identified by w
3
and w
5
,
and a Di(3, 3) prior to the stage identified by w
4
. We
would then have a marginal likelihood of
KEOD 2009 - International Conference on Knowledge Engineering and Ontology Development
394

Γ(11)
Γ(11 + N)
Γ(3 + x
01
)Γ(4 + x
02
)Γ(4 + x
03
)
Γ(3)Γ(4)Γ(4)
×
Γ(7)
Γ(7 + x
01
+ x
02
)
Γ(3 + x
14
+ x
24
)Γ(4 + x
15
+ x
25
)
Γ(3)Γ(4)
×
Γ(4)
Γ(4 + x
03
)
Γ(2 + x
36
)Γ(2 + x
37
)
Γ(2)Γ(2)
×
Γ(6)
Γ(6 + x
15
+ x
24
+ x
36
)
Γ(3 + x
48
)Γ(3 + x
49
)
Γ(3)Γ(3)
×
Γ(4)
Γ(4 + x
25
+ x
37
)
Γ(2 + x
5·10
)Γ(2 + x
5·11
)
Γ(2)Γ(2)
where, with a slight abuse of notation, we let for ex-
ample x
24
be the data value associated with the edge
leaving w
2
labelled θ
4
; and where N is the sample size
=
∑
3
n=1
x
0n
.
In this paper we have concentrated on the princi-
ple of assigning a score to a member of a candidate
class. For a more formal presentation of an algorithm
for searching over this class see (Freeman and Smith,
2009). An expanded version of this paper appears
at http://www2.warwick.ac.uk/fac/sci/statistics/
crism/research/2009/paper09-07, including an exam-
ple demonstrating the versatility of our method, and
an extended discussion section.
Note that the inputs to our search algorithm will
consist of a candidate set of models and data from the
problem we are modelling. The candidate set may be
constrained as described above. The output of the al-
gorithm will be the MAP model given the data and
our candidate set. As with learning BNs, exhaus-
tive search will be superexponential in the number of
problem variables. However, as with BNs for large
problems, fast local search algorithms can be devised
which quickly explore subclasses of CEGs that for
contextual reasons are expected to explain the data
well.
ACKNOWLEDGEMENTS
This research has been partly funded by the EPSRC
as part of the project Chain Event Graphs: Semantics
and Inference (grant no. EP/F036752/1).
REFERENCES
Cooper, G. F. and Herskovits, E. (1992). A Bayesian
method for the induction of Probabilistic Networks
from data. Machine Learning, 9(4):309–347.
Freeman, G. and Smith, J. Q. (2009). Bayesian model
selection of Chain Event Graphs. Research Report,
CRiSM.
Heckerman, D., Geiger, D., and Chickering, D. (1995).
Learning Bayesian Networks: The combination of
knowledge and statistical data. Machine Learning,
20:197–243.
Shafer, G. (1996). The Art of Causal Conjecture. MIT
Press.
Smith, J. Q. and Anderson, P. E. (2008). Conditional inde-
pendence and Chain Event Graphs. Artificial Intelli-
gence, 172:42–68.
Smith, J. Q., Riccomagno, E. M., and Thwaites, P. A.
(2009). Causal analysis with Chain Event Graphs.
Submitted to Artificial Intelligence.
Thwaites, P. A., Smith, J. Q., and Cowell, R. G. (2008).
Propagation using Chain Event Graphs. In Proceed-
ings of the 24th Conference on Uncertainty in Artifi-
cial Intelligence, Helsinki.
CHAIN EVENT GRAPH MAP MODEL SELECTION
395
