
ORGANIZING AND PLANNING THE ASIC DESIGN PROCESS BY
MEANS OF A MULTI-AGENT SYSTEM
Jana Blaschke
1
, Christian Sebeke
1
1
Robert Bosch GmbH, T
¨
ubinger Straße 123, 72762 Reutlingen, Germany
Wolfgang Rosenstiel
Department of Computer Science, University of T
¨
ubingen, Sand 13, B 207, 72076 T
¨
ubingen, Germany
Keywords:
Multi agent simulation, Global scheduling, Local scheduling, Task planning, ASIC design.
Abstract:
Because of constantly improving technologies, the complexity of Integrated Circuits (ICs) is continuously
increasing. Consequently IC design becomes continously more challenging and complex. A huge number of
different possible design flows exists, delimited by different constraints. The design flow dynamically changes
as recursions between design tasks occur. An approach that allows a fast and efficient ASIC design and that
can deal with this huge complexity and dynamics is needed. Therefore we propose a methodology based on a
multi-agent simulation combined with global and local scheduling techniques to construct a time-dependent,
detailed model of the ASIC design process, which permits an extensive analysis and efficient organization.
1 INTRODUCTION
Smaller channel width in microelectronics together
with design automation enables a realization of very
complex ICs for electronic devices, comprising a vast
number of functionalities (Moore, 1998). As several
recursion steps occur between the frontend and back-
end design, the whole design process is extremely dy-
namic and difficult to predict. Another degree of com-
plexity is introduced by different methods to realize
the design steps. Altogether the design process of
ASICs is a highly complex, dynamic and non-linear
procedure, depending on human decisions.
If Moore’s Law persists, the required design ef-
fort for ICs exceeds realistic imaginations. Limit-
ing factors restricting the ASIC design are e.g. CPU
power, human capability to work faster or tool run-
times. An approach that allows an analysis and effi-
cient planning of ASIC design projects is needed to
realize more complex projects. As Multi-agent sys-
tems (MAS) inherit properties that are very suitable
for modelling and simulating highly complex prob-
lems involving human decisions in domains within a
dynamically changing environment, we developed a
methodology based on MA simulation combined with
scheduling mechanisms. The simulation is organized
in two distinct phases: a long term planning based on
a Genetic Algorithm (GA) optimization for a high-
level plan, and a short term planning to react dynami-
cally to events. By this means we are able to develop
optimized but realistic project courses of ASIC design
projects for an efficient project organization. Addi-
tionally it allows a what-if analysis and comparison
of different design flows with different design tools.
2 PREVIOUS WORK
MAS are widely used for simulation of human net-
works, organizing themselves to reach a defined goal
(Schurr et al., 2005).
Scheduling of ASIC design projects is an issue for a
long time (Easley et al., 1989). But due to a quickly
changing design environment, design automation and
new technologies ASIC design project planning re-
quirements are changing constantly, old approaches
become obsolete. Recent research in Design Project
Scheduling focuses on selected design steps, as for
example the high level synthesis of net lists (Lin and
Kim, 2006), instead of scheduling the whole project.
Models of aother research groups are based on de-
rived metrics (Leppelt et al., 2006). But this neither
allows what-if analysis of projects nor a reasonable
planning for investments and resources.
459
Blaschke J., Sebeke C. and Rosenstiel W. (2010).
ORGANIZING AND PLANNING THE ASIC DESIGN PROCESS BY MEANS OF A MULTI-AGENT SYSTEM.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 459-463
DOI: 10.5220/0002698704590463
Copyright
c
SciTePress

3 APPROACH
Our approach has to enable the analysis and optimal
organization of the ASIC design process and has to
provide an efficient planning of ASIC project courses
considering a lot of prerequisites. First, a simulation
of finished projects for evaluation purposes and com-
parison to other projects needs to be enabled. Second,
new and ongoing projects need to be planned in con-
sideration of budget, resources, deadlines, alternative
design styles and the task organization.
As we have to deal with a highly complex prob-
lem and a dynamic environment, MAS are an ade-
quate way of simulating a group of humans executing
design tasks. So a MAS simulation is chosen as the
core of the system model. The ASIC-MAS architec-
ture is shown in fig. 1. For task execution we need
two types of ressources agents, a designer agent and
the design tool agent. These agents belong, according
to their expertise and functions, to different design ar-
eas. A high-level plan for task execution and design
organization is provided by a planning agent, also re-
sponsible for the resource allocation of the tasks. Dy-
namics are introduced to our system by an interfer-
ence module modelling recursive processes and un-
foreseen events, perturbing the smooth schedule exe-
cution and modelling dynamics inherent in processes
lead by humans. A monitoring agent is tracking the
simulation, calculating the deviation of the high-level
schedule and the actual simulation. The schedule and
the MAS organization are adapted during the simu-
lation if their deviation exceeds a given limit. Local
scheduling methods can re-organize small parts of the
simulation in a sensible way. The tracked agent activ-
ity gives a realistic estimate of the duration of design
process and a suggestion how to organize it.
4 MULTI-LEVEL
ORGANIZATION OF THE
ASIC-MAS
We developed a two-stage planning strategy to obtain
an efficiently organized MA simulation.
4.1 Long-term Planning
We implemented a long term scheduling that takes
place at the beginning of the simulation to gain a
high level plan for an efficient simulation organiza-
tion. This algorithm assigns resources to tasks and
produces a (near) optimal task execution order. The
objective of the optimization is the minimization of
D
D
D
T
T
T
D D
T
T
T
T
T
T
D
D
D
D
D
D
D
D
T
T
T
T
GA
Planner
Monitor
Agent
Digital Circuit Design
Analogue Circuit Design
Analogue Layout
Digital Layout
replanning
Interference
Modul
Figure 1: ASIC-MAS architecture.
the overall execution time of an ASIC design project:
min T
design
, while tasks need to be assigned to design-
ers with different experience modes out of different
design regions and tools considering task dependen-
cies and resource constraints. We use a scheduling op-
timization heuristic based on genetic algorithms (GA)
(Blaschke et al., 2009). Designers planned holidays
are incorporated in the optimized schedule.
The high level scheduling is managed by one ded-
icated planning agent. He passes the necessary task
and resource information to the GA scheduling algo-
rithm and receives the optimization result of the GA.
He assigns the tasks to requesting designers.
4.2 Short-term Planning
The high level plan is an optimized schedule under
optimal designing conditions: every designer acts ex-
actly as planned. But reality is different: designers
become ill, take one or two days off, task execution
takes longer or shorter than assumed and many recur-
sions occur between tasks, resulting in new recursive
tasks. The design process is dominated by these dy-
namic events, which cannot be modelled and consid-
ered by the static high level plan produced by the GA.
To model these events we developed an interfer-
ence module. It introduces the dynamics inherent in
the ASIC design process. Therefore, during process-
ing the agent simulation deviates more and more from
the optimized GA schedule. The reaction to this di-
vergence is the local planning of the designer agents.
Different mechanisms are used for different events,
which are shown in fig. 2. We will describe the mech-
anisms in detail in the following subsections.
The monitoring agent tracks the simulation. He
compares it to the high level plan at frequent intervals.
The deviation at simulation time s
j
is:
dev =
n
∑
i=1
f (δ(t
i
, s
j
)) · (1 +a(t
i
) − p(t
j
))
+δ(ra(s
j
)),
where n is the number of tasks, f (δ(t
i
, s
j
)) calculates
the delay of the task t
i
in the simulation compared to
the schedule, a(t
i
) weights the number of dependent
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
460

search tool
inform
else:
inform when
tasks
available
search tool
Monitoring
Agent
Tool
Agent
Designer
Agent
Planning
Agent
high level
plan
start start start
Designer
Agent
Tool
Agent
start start
tool license
found
tool license
found
if
task
provide task
provide task
execute
task
execute
task
search tool
search tool
inform
inform
compare:
schedule –
simulation
compare:
schedule –
simulation
if
exceed
limit
if
exceed
limit
replan
replan
if
ill
inform
local
planning
local
planning
inform
decisions
task
recursion
local
planning
local
planning
inform
decisions
decision?
decision?
inform
tools offer services
designers: compete for
tool licences
task request
after each period
inform
local
planning
inform
decisions
Figure 2: Short term scheduling negotiation architecture.
tasks to t
i
, p(t
j
) is the buffer time of the task in the
optimized high level schedule and δ(ra(s
j
)) is the re-
source workload of the simulation at time s
i
. If this
value exceeds a given limit, a global re-scheduling is
initiated. All tasks that are being executed at that mo-
ment are still finished. All other tasks are scheduled
anew with the GA.
Illness and short holidays are dynamic events in-
duced by the interference module and thus not plan-
able by the GA. As a global re-schedule would be
oversized and far to timeconsuming, a local planning
mechanism is chosen for an adequate reaction. If one
of these events occurs while a designer is accomplish-
ing a task, the task execution is interrupted and the
overall execution time prolonged. As many tasks do
have dependent tasks and the schedule is also opti-
mized with respect to the resource workload, this pro-
longation delays tasks scheduled later, which leads to
a bad resource workload and project elongation. The
consequences of task delays can often be reduced by a
local re-planning of the designer agents and a transfer
of partial tasks from one agent to another. The deci-
sion and planning process be seen in flow chart 2. The
goal is the minimization of a project delay.
Recursions often occur between frontend and
backend tasks if the backend discovers that some
specifications can not be fulfilled. These recursions
cannot be planned. Hence we defined a Markov Chain
that evokes recursions. This implicates new tasks with
interdependencies to other tasks which have to be in-
serted into the simulation. As a new GA scheduling
is not always necessary, a local planning between the
designer agents takes place. They try to insert the new
tasks into the simulation in an efficient manner. The
local planning process is shown in fig. 2.
5 MAIN RESULTS
In this section we present the results of our ASIC-
MAS and give a statement about its applicability.
5.1 Verification of the Model
We generated several problems to verify the GA opti-
mization as well as the MA simulation in conjunction
with the interference module.
In this section we describe and analyse the perfor-
mance of our MAS by applying it to a representative
but clearly arranged problem. At first we demonstrate
the correct performance of the simulation. We chose
a simulation run where a re-scheduling occurs, a task
is handed over from one agent to another and a task
recursion happens. Then we analyse the simulation
part of the MAS before a re-schedule is initiated (fig.
3) and the second GA schedule that is produced after
the re-schedule (also fig. 3). At the end we analyse
the whole simulation run (depicted in fig. 4).
A project execution schedule is produced at every
begin of a simulation run by the GA. The makespan of
the schedule is 20 days. This is the minimal makespan
possible under consideration of all constraints.
After the schedule optimization we applied the
high level schedule to the MAS with the interference
module switched on. Fig. 3 shows the MA simulation
until the re-schedule stop occurred, and the new GA-
optimized global schedule for the remaining tasks.
The simulation deviates from the schedule due to dif-
ferent reasons. Some tasks need a longer execution
time than planned, delaying the schedule and other
dependent tasks. Abscent designers prolong task exe-
cutions. After 11 days the simulation-schedule devi-
ation is too large, a re-schedule is initiated. All tasks
that have already been started are finished despite the
re-schedule. The new global schedule supplements
perfectly the simulation considering all constraints.
The Gantt chart of the tracked agent activity of
the whole simulation is shown in fig. 4. Task4 needs
one day less to be accomplished than planned. There-
fore Task1, which is dependent on resources previ-
ously occupied by Task4, can be started and ended
earlier. The execution of Task5 takes one day longer
than planned. The first digital designer becomes ill
while executing Task6. He offers the remaining task
ORGANIZING AND PLANNING THE ASIC DESIGN PROCESS BY MEANS OF A MULTI-AGENT SYSTEM
461
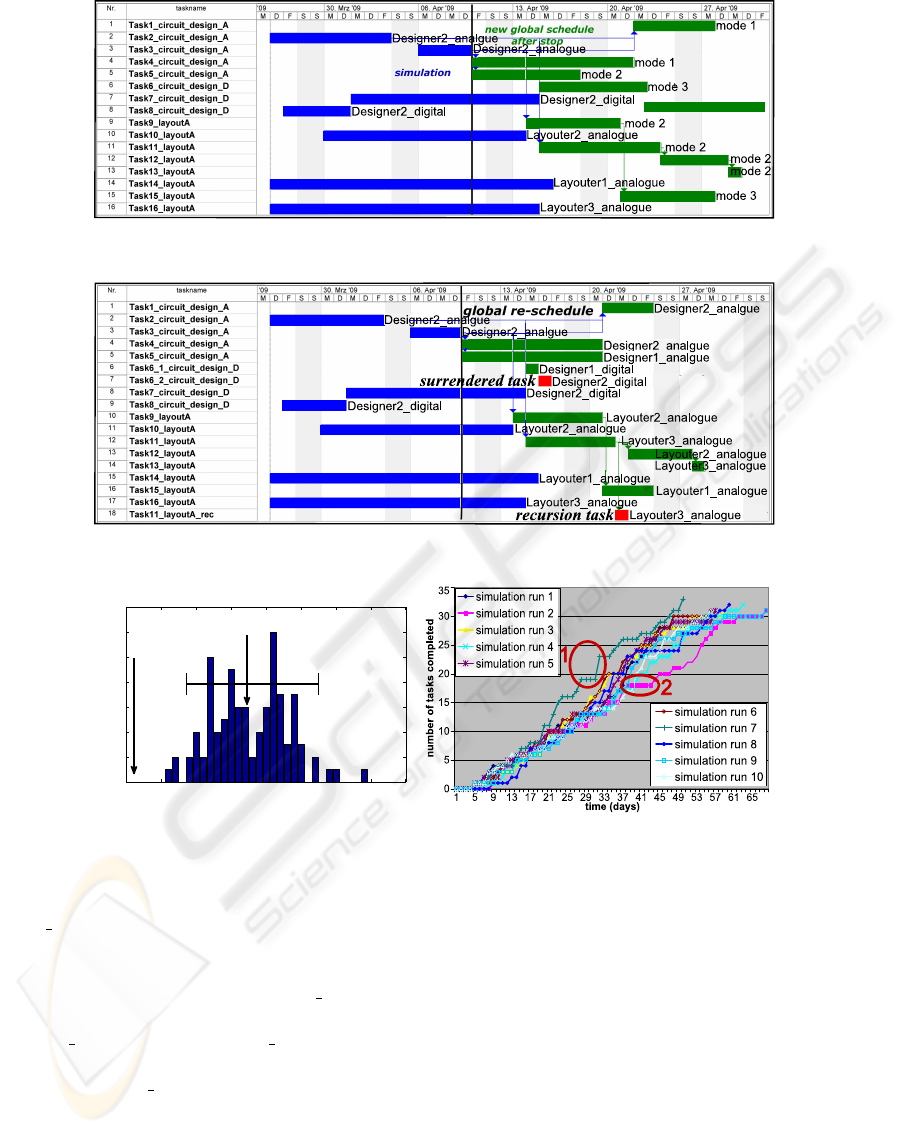
Figure 3: Two stages of the whole simulation, separated by a horizontal bar.
Figure 4: Tracked agent activity of the whole simulation.
Figure 5: (a) Statistic of several simulation runs, (b) completion degree of simulation runs.
to the other agents of his design region. As De-
signer2 digital does not work on a task at that point
he takes Task6. Task11 is processed in two days
less than planned. A recursion is induced after it
is completed. A recursive task, Task11 rec, is cre-
ated and proposed to all analogue layouters. Only
Layouter2 analogue and Layouter3 analogue are free
and can compete for that new task. According to the
schedule Layouter2 analogue has to execute a task
earlier than Layouter3, Layouter2 wins the task. The
simulation of the second part is finished one day ear-
lier than the second global schedule proposed.
The optimized global schedule has an overall exe-
cution time of 20 days. The overall execution time
of the MA simulation lasts 23 days. In considera-
tion of all interrupting events a deviation of three days
from the optimal execution time is little. As well the
global re-scheduling as the two local scheduling tech-
niques re-organize the simulation so efficiently that
these perturbations do effect the overall project sim-
ulation time little. The re-scheduling techniques re-
spond efficiently to and head of the prolonging effects
of interruptions and improved the resource utilization.
5.2 Analysis of Projects
The ASIC-MAS can be used for an extensive analy-
sis of projects. Multiple design-simulation runs give
statistics of estimated runtimes. A sample of a statis-
tic shows fig. 5(a) for a project with 30 activities. It
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
462

shows the results of 100 simulation runs. The opti-
mal GA-schedule runtime (45) days is indicated by
an arrow, as well as the mean simulation runtime of
61 days, a project runtime of 60 days ± 9 days can
be expected. The mean degree of project completion
for every day of the simulation depicts fig. 5(b) for 10
simulation runs. The analysation of several runs gives
an overview of advantageous start configurations (cir-
cle 1) and critical activities that often lead to bottle-
necks (circle 2). Here, simulations starting with activ-
ity 8, 5 and 15 tend to result in shorter runtimes than
simulations starting with activity 2 or 13. Bottlenecks
are entailed sometimes by activities 1, 3, 6, 26 and
30. With this information the project leader can react
adequatly.
6 CONCLUSIONS AND FUTURE
WORK
The generated schedule and the MA simulation can
be used for analysis, optimization and planning of fin-
ished, ongoing or future projects. The schedule opti-
mization provides suggestions for an efficient orga-
nization of projects and permits a subsequent analy-
sis for identification of weak spots within the project
course. The setting of different project parameters,
e.g. different resource availabilities, allows what-if-
analysis. The simulation allows to observe the project
execution. An interfere module disturbes the smooth
simulation of the optimized schedule, allowing as-
real-as-possible simulations to gain reliable and real-
istic predictions on project courses and makespans.
Local scheduling and global re-scheduling methods
head off prolonging effects by organizing and allocat-
ing parts in an efficient and sensible way.
In future experiments we are going to evaluate the
performance of the System to investigate how good
our whole model reflects reality.
REFERENCES
Blaschke, J., Sebeke, C., and Rosenstiel, W. (2009). Using
genetic algorithms for planning of ASIC chip-design
project flows. In Proceedings of the IEEE Congress on
Evolutionary Computation (CEC 2009), page P135.
Easley, S., Freeman, E., and Steele, D. (1989). Asic design
project scheduling. ASIC Seminar and Exhibit, 1989.
Proceedings., Second Annual IEEE, pages P11–2/1–4.
Leppelt, P., Hassine, A., and Barke, E. (2006). An approach
to make semiconductor design projects comparable.
In 7th Asia Pacific Industrial Engineering and Man-
agement Systems Conference (APIEMS 2006), pages
CD–ROM. Asian Institute of Technology.
Lin, C.-H. and Kim, J.-C. (2006). A novel scheduling
methodology for asic design. System-on-Chip for
Real-Time Applications, The 6th International Work-
shop on, pages 131–134.
Moore, G. E. (1998). Cramming more components onto in-
tegrated circuits. Proceedings of the IEEE, 86(1):82–
85.
Schurr, N., Marecki, J., and Tambe, M. (2005). The future
of disaster response: Humans working with multia-
gent teams using defacto. In In AAAI Spring Sympo-
sium on AI Technologies for Homeland Security.
ORGANIZING AND PLANNING THE ASIC DESIGN PROCESS BY MEANS OF A MULTI-AGENT SYSTEM
463
