
TOWARDS A COMPREHENSIVE TEAMWORK MODEL FOR
HIGHLY DYNAMIC DOMAINS
Hendrik Skubch, Michael Wagner, Roland Reichle, Stefan Triller and Kurt Geihs
Distributed Systems Group, Kassel University, Wilhelmsh
¨
oher Allee 73, Kassel, Germany
Keywords:
Mutli-agent systems, Teamwork, Coordination, Coorperation, Dynamic domains.
Abstract:
Cooperative behaviour of agents within highly dynamic and nondeterministic domains is an active field of
research. In particular establishing responsive teamwork, where agents are able to react to dynamic changes in
the environment while facing unreliable communication and sensory noise, is an open problem. Unexpectedly
changing situations force agents to react and adapt under tight time-constraints. Hence they often cannot
communicate or agree upon their decisions before acting upon them. We present a novel model for cooperative
behaviour geared towards such domains. In our approach, the agents estimate each other’s decision and
correct these estimations once they receive contradictory information. We aim at a comprehensive approach for
agent teamwork featuring intuitive modelling capabilities for multi-agent activities, abstractions over activities
and agents, and clear operational semantics for the new model. We show experimentally that the resulting
behaviour stabilises towards teamwork and can achieve a cooperative goal.
1 INTRODUCTION
Highly dynamic and nondeterministic domains im-
pose a number of challenges for the realisation of
responsive yet coherent teamwork of autonomous
agents. Teams of agents operating in such domains
have to be robust against sensory noise, breakdown
of individual agents, and unexpectedly changing situ-
ations. Such changes in the environment require the
agents to react and adapt under tight time-constraints.
This entails that it is often impossible to explicitly
communicate – or even agree upon – a decision be-
fore acting on it. Maintaining a highly responsive and
coherent teamwork is even more difficult, if commu-
nication is unreliable.
In this paper, we introduce a novel approach for
cooperative behaviour, focusing on teams of agents
acting in highly dynamic domains. The model con-
sists of the agent oriented language ALICA (A Lan-
guage for Interactive Cooperative Agents), which pro-
vides modelling facilities for cooperative behaviour,
and clear operational semantics, that determine in de-
tail how agents act.
ALICA is closely related to STEAM (Tambe,
1997), a model for teamwork based on both Joint
Intentions (Levesque et al., 1990) and Shared
Plans (Grosz and Kraus, 1996). In contrast to
STEAM, ALICA agents in general do not establish
joint intentions before acting towards a cooperative
goal. Instead, each agent estimates the decisions of
its teammates and acts upon this prediction. The re-
sulting internal states are communicated periodically,
thus allowing for individual decisions to be corrected
dynamically. ALICA provides language elements to
enforce an explicit agreement, resulting in a joint in-
tention, for activities that require time critical syn-
chronisations, such as lifting an object cooperatively.
We present operational semantics for ALICA pro-
grams based on 3APL’s semantics (Hindriks et al.,
1999). ALICA programs are modelled from a global
perspective, such that team activities are described di-
rectly instead of being the result of interacting single
agent programs. The operational semantics explic-
itly dictates how to execute an ALICA program. The
complete semantics does not fit in the scope of this
paper, but can be referred to in (Skubch et al., 2009).
ALICA features a two-layered abstraction be-
tween concrete activities and agents. Roles abstract
over agents, describing capabilities and resulting pref-
erences for specific tasks. Tasks, on the other hand,
abstract from specific activities, and relate similar ac-
tivities within different contexts, called plans. This
allows for plans to be specified independently of the
team executing them and teams to be specified inde-
pendently of the plans they might execute.
The state of the art is enhanced by providing a
121
Skubch H., Wagner M., Reichle R., Triller S. and Geihs K. (2010).
TOWARDS A COMPREHENSIVE TEAMWORK MODEL FOR HIGHLY DYNAMIC DOMAINS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 121-127
DOI: 10.5220/0002701201210127
Copyright
c
SciTePress

rich language to specify cooperative behaviour, a pro-
gramming model with clear operational semantics,
and elaborate coordination mechanisms for respon-
sive teamwork at the same time. Thus, our approach
can be considered as a step towards a comprehensive
team-work model for highly dynamic domains.
The next section discusses related work and de-
scribes ALICA’s relation to STEAM and 3APL in
more detail. Section 3 formally introduces the lan-
guage, whose semantics is discussed in Section 4. In
Section 5, we present evaluation results within the
robotic soccer domain. Finally, Section 6 concludes
the paper and hints at future work.
2 RELATED WORK
Many research activities tackled the problem of de-
scribing agent behaviour and addressed the chal-
lenge to establish coherent teamwork of autonomous
agents. As a result there exist several teamwork
theories. One of them is the Joint Intentions The-
ory (Levesque et al., 1990), founded on BDI (Brat-
man, 1987). The framework focuses on a team’s joint
mental state, called a ’joint intention’. A team jointly
intends a team action if team members jointly commit
to an action while in a specified mental state. In or-
der to enter a joint commitment, team members have
to establish appropriate mutual beliefs and individual
commitments. Although the Joint Intentions Theory
does not mandate communication and several tech-
niques are available to establish mutual beliefs about
actions from observations, communication currently
seems to be the only feasible way to attain joint com-
mitments. However, a single joint intention for a
high-level goal seems not appropriate to model team
behaviour in detail and to ensure coherent teamwork.
The Shared Plans Theory (Grosz and Kraus, 1996;
Grosz and Sidner, 1990) helps to overcome this short-
coming. In contrast to joint intentions, the Shared
Plans Theory is not based on a joint mental attitude
but on an intentional attitude called ’intending that’.
’Intention that’ is defined by a set of axioms that guide
an individual to take actions, enabling or facilitating
its teammates to perform assigned tasks. A Shared-
Plan for group action specifies beliefs about how to
do an action and sub actions.
STEAM (Tambe, 1997) builds on both teamwork
theories and tries to combine their benefits. It starts
with joint intentions, but then builds up hierarchi-
cal structures that parallel the Shared Plan Theory.
So STEAM formalises commitments by building and
maintaining joint intentions and uses Shared Plans to
treat a team’s attitudes in complex tasks, as well as
unreconciled tasks.
In contrast to STEAM, ALICA agents do not es-
tablish joint intentions before acting towards a coop-
erative goal. Instead, each agent estimates the de-
cisions of its team mates and acts upon this predic-
tion. Conflicting individual decisions are detected
and corrected using periodically communicated inter-
nal states of teammates. Although STEAM provides
approaches for selective communication and track-
ing of mental attitudes of teammates, we argue that
for highly dynamic domains and time-critical applica-
tions the strict requirement to establish or estimate a
joint commitment before a joint activity is started has
to be skipped. We deem agents that decide and act un-
til contradictory information is available to be much
more suitable for such applications. The assignment
of agents to teams and teams to operators employed
by STEAM seems to be too static for highly dynamic
domains. In a soccer game, for example, a defend-
ing robot should also be able to carry out an attack
if it obtains the ball and the game situation seems to
be promising to do so. In order to facilitate such be-
haviour, we provide a different definition of roles and
incorporate the concept of tasks. With its coordina-
tion approach, ALICA also abandons the concept of
a ’team-leader’ which STEAM assumes for different
purposes in team coordination.
All previously described teamwork models have
in common that they provide mechanisms to rea-
son about or to establish teamwork, but they do not
specify the internals of plans or operators. STEAM,
and its implementation TEAMCORE (Pynadath et al.,
1999), just assume reactive or situated plans, but do
not specify the internal control cycle of an agent.
Here, agent programming languages inspired the de-
sign of ALICA, in particular 3APL. ALICA incorpo-
rates many concepts of 3APL, e.g., the definition of
the belief base, substitution of variables and the inter-
pretation of goals as ’goals-to-do’, which are not de-
scribed declaratively but via plans that are directed to-
wards achieving a goal. Furthermore, ALICA defines
its operational semantics similar to 3APL through a
transition system. However, in contrast to ALICA,
3APL also facilitates explicit specification of goals.
It introduces rule sets and beliefs to allow reasoning
about both, goals and plans. 3APL understands itself
as an abstract language, allowing to specify the de-
liberative cycle itself. ALICA is specifically aimed at
modelling multi-agent strategy from a global perspec-
tive. This is impossible in 3APL. Moreover, ALICA’s
transitional rule system is geared towards cooperative
agents, and hence is much more specific then the rule
system employed by 3APL.
Considering the aspects above, we argue that AL-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
122

ICA enhances the state of the art in team-work mod-
els, as it provides a further step towards a compre-
hensive approach that provides support for all aspects
of team coordination and also for explicit program-
ming of team behaviour from a global perspective at
the same time. With its approach to allow agents to
decide and act towards a certain team-goal without
explicit establishment of a joint commitment, it is also
very suitable for highly dynamic domains that require
fast decisions and actions and do not allow explicit
communication and negotiations beforehand.
3 THE LANGUAGE
The central notion within ALICA are plans. A plan
describes specific activities, a team of agents has to
execute in order to achieve a certain goal. Plans
are modelled similar to petri-nets, containing states
and transitions between the states. Each transition is
guarded by a condition, which must be believed to
hold by an agent in order to progress along it.
The set of all plans in an ALICA program is de-
noted by P . Z denotes all states. The belief base of
each agent is described in a logic with language L,
hence all conditions are elements of L. Each transi-
tion τ is an element of Z × Z ×L.
ALICA abstracts two-fold from agents, by tasks
and roles. A role is assigned to an agent based on
its capabilities. This assignment is treated to be com-
partively static, i.e., it holds until the team compo-
sition changes. This is the case if an agent joins or
leaves the team, e.g., due to being incapacitated.
Tasks on the other hand abstract from specific
paths within plans. As such, they denote similar ac-
tivities in different plans. If a group of agents is
to execute a plan, the corresponding tasks are allo-
cated to the available agents based on the situation at
hand and the roles the agents are assigned. This two-
layered abstraction allows for programs to be speci-
fied independently of the team composition that will
be on hand during execution. A team composition
can be described solely by the roles each agent is as-
signed, while plans can be described without referring
to roles. Each role has a numeric preference towards
tasks, which allows roles to be mapped onto tasks dy-
namically during runtime (see Section 4.1).
Since plans describe activities for multiple agents,
they have multiple initial states, each of which is an-
notated by a task. Hence, a task abstracts from spe-
cific activities within plans, and multiple plans can be
annotated with the same tasks. For instance, a plan to
build a tower and one to build a bridge might both
contain the task of moving building blocks. Since
tasks might require multiple agents, each task-plan
pair (p, τ) is annotated by a cardinality, i.e., by an in-
terval over N
0
∪{∞}, denoting how many agents must
at least and may at most be allocated to τ in p.
The applicability of a plan in a situation is mea-
sured in two ways. Firstly, each plan p is annotated
by a precondition Pre(p), which has to hold when
the agents start to execute it, and a runtime condition
Run(p), which has to hold throughout its execution.
Secondly, each plan p is annotated by a utility func-
tion U
p
, which is used to evaluate the plan together
with a potential allocation of agents to tasks within p
wrt. a situation. A utility function maps believed or
potential situations onto the real numbers. Both con-
ditions and utility functions solely refer to the belief
base of an agent, which contains believed allocations.
Plans can be grouped together in plan types, pro-
viding the agents with sets of alternatives for solv-
ing a particular problem. Choosing a specific plan
from a plan type is done autonomously by the agents
in question. This selection is guided by the utility
functions and conditions of the plans involved. Each
state contains an arbitrary number of plan types. For
each plan type, the agents involved have to choose
a plan and execute it, i.e., multiple plans, one from
each plan type, are executed in parallel. Additionally,
each state contains an arbitrary number of behaviours.
Behaviours are atomic single-agent action programs.
The set of all behaviours is denoted by B. Each be-
haviour within a state is meant to be executed by all
agents inhabiting the corresponding state.
The relationship between states, plans and plan
types spans a hierarchical structure, called the plan
tree of an ALICA program.
4 SEMANTICS
The semantics of ALICA is given by a transitional
rule system, which describes how the internal states
of agents change over time. These internal states are
referred to as agent configurations. Additionally, a set
of axioms, Σ
B
, constrains these configurations.
Definition 4.1 (Agent Configuration). An agent con-
figuration is a tuple (B, ϒ, E, θ, R), where B is the
agent’s belief base, ϒ its plan base, E ⊆ B × Z the
set of behaviours b the agent executes together with
the state in which b occurs, θ a substitution, and R is
a set of roles assigned to the agent.
The plan base contains triples (p, τ, z), indicating
that the agent is committed to task τ in plan p and cur-
rently inhabits state z within p. Each triple is reflected
by a literal in the belief base, In(a, p, τ, z), represent-
ing the belief that (p, τ, z) is an element of agent a’s
TOWARDS A COMPREHENSIVE TEAMWORK MODEL FOR HIGHLY DYNAMIC DOMAINS
123

plan base. Similarly, HasRole(a,r) captures the belief
that role r is assigned to a.
4.1 Task Allocation and Plan Selection
Whenever an agent enters a state, it has to take care
that a plan out of each plan type within that state is ex-
ecuted. This does not entail that the agent is required
to execute the plan, it is sufficient to come to the con-
clusion that there are agents executing it. This gives
rise to the allocation problem.
An allocation done by agent a for a plan p is a
set of literals of the form In(a
0
, p, τ, z), referred to as
TAlloc(a, p|F ). The allocation is calculated under
the set of assumptions F . Normally, it equals the be-
lief base of a. In case of planning, F can refer to
a potential situation in the future. A task allocation is
subject to several constraints, such as the pre- and run-
time conditions of plan p, Pre(p) and Run(p). More-
over, it must be consistent with the assumptions F
under which it is computed, and the axioms Σ
B
. E.g.,
Σ
B
rule out agents taking on multiple tasks within the
same plan. Definition 4.2 captures these constraints.
Definition 4.2 (Valid Task Allocation). A Task Allo-
cation TAlloc(a, p|F ) for agent a with the configura-
tion (B, ϒ, E, θ, R) is valid iff
• Σ
B
∪F ∪ TAlloc(a, p|F ) 6|= ⊥
• Σ
B
∪F ∪ TAlloc(a, p|F ) |= (Pre(p) ∧ Run(p))θ
• Σ
B
∪F ∪ TAlloc(a, p|F ) |= TeamIn(p)
where TeamIn(p) denotes that the given team of
agents A executes plan p. Formally:
TeamIn(p)
de f
= (∀τ ∈ Tasks(p))(∃n
1
, n
2
)
ξ(p, τ) = (n
1
, n
2
) ∧
(∃A
0
)A
0
⊆ A ∧ n
1
≤ |A
0
| ≤ n
2
∧
(∀a
0
∈ A )a
0
∈ A
0
↔ (∃z) In(a
0
, p, τ, z)
where ξ(p, τ) refers to the cardinalities of task τ in
plan p.
The set of agents that can be referred to in an al-
location is limited by Σ
B
to the ones believed to be
in the respective parent state z, i.e., for each agent a
0
occuring in TAlloc(a, p|F ), In(a
0
, p
0
, τ
0
, z) must hold
in F . Among all valid task allocations for p, agent a
has to choose the one that maximises the utility func-
tion of plan p. Various algorithms can be used for
this maximisation problem; we use A
∗
in our imple-
mentation. Since p is an element of a plantype P,
the optimisation extends to all plans in P. In other
words, there must not be a plan p
0
in P for which
a valid task allocation T
0
wrt. F exists such that
U
p
(F ∪ TAlloc(a, p|F )) < U
p
0
(F ∪ T
0
). This prob-
lem can trivially be integrated into the maximisation
by extending the search space to all elements of P.
Figure 1: Recursive Task Allocation.
If the task allocation of agent a allocates a to task
τ in p, a enters a state identified by p and τ, denoted
as Init(p, τ). Intuitively, this is the initial state for task
τ in plan p. Since Init(p, τ) can contain plan types
again, new allocation problems arise. For every plan
type P
0
in Init(p, τ), a plan p
0
in P
0
has to be chosen,
such that TAlloc(a, p
0
|F ∪ TAlloc(a, p|F )) is valid.
So, the task allocation is recursive. This recursion is
be captured by a backtracking algorithm, backtrack-
ing whenever a valid allocation cannot be found.
Note, the recursion applies only to those states the
calculating agent enters. As such, agents only deal
with a local view of the complete allocation. Figure 1
depicts an example of the backtrack search and this
local view, where agent a allocates agents a, b, and c.
Figure 1(a) shows agent a’s result of the recursive task
allocation. Agent a has to allocate itself within p
4
.
If it cannot find a valid task allocation for p
4
, back-
tracking occurs (see Figure 1(b)). Figure 1(c) shows
the final task allocation, where agent a has swapped
places with agent c within plan p
1
. Note, that a has
not allocated b and c within p
3
. This reflects the local
view of a on this plan tree.
After an allocation is computed, the belief base is
updated accordingly and the agent acts based on the
calculated assumptions. In order to deal with poten-
tial inconsistencies, each agent communicates its plan
base periodically. Whenever an agent receives a mes-
sage, its belief base is updated. Conflicts can be de-
tected and are dealt with by specific transitional rules.
They entail a reallocation, an abortion of the plan, or
the pursuit of an alternative course of action. Here,
we focus on reallocation, which an agent performs if
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
124

it believes this will improve the corresponding utility
function. In particular, the utility of a plan with an in-
valid allocation is defined to be 0, and greater or equal
0 in case of a valid one.
4.2 Transitional Rule System
Transition rules define how an agent’s configuration
changes during a single deliberation cycle wrt. the ex-
ecuted ALICA program. Thus, they describe the op-
erational semantics of ALICA. Each rule is guarded
by a condition and transforms the current configura-
tion of an agent into a new one.
The complete rule system (Skubch et al., 2009) is
out of scope of this paper. Essentially, each rule gov-
erns a reaction to specific situations an agent faces
with respect to an ALICA program. Rules are parti-
tioned into two sets. First, so-called operational rules,
describing the normal operation of a program. Sec-
ond, repair rules, which handle unexpected failures.
The operational rules define how an agent exe-
cutes an ALICA program. They monitor transitions,
describe how an agent leaves a state, and enforce task
allocations for newly entered states. Furthermore, op-
erational rules react to successful execution of be-
haviours or plans and propagate this information up
the plan tree. A precedence order over rules is used to
break ties between multiple applicable rules.
Repair rules handle the cases where something
went wrong. Depending on the kind of failure, the
corresponding behaviour or plan is first aborted, and
afterwards either retried, replaced by an alternative or,
if both is impossible, the failure is propagated up the
plan tree. Each of these reactions is handled by a par-
ticular rule. In case two repair rules can be applied,
precedence is given to the one that requires the small-
est change. For example, retrying a particular plan is
less of an effort than propagating the failure upwards.
Repair rules are always overruled by operational
rules. Thereby, unnecessary repairs are avoided, and
domain specific failure handling can be modelled by
declaring transitions referring to believed failures.
The transitional rule system is not only used to
update agent configurations, but it allows the agents
to track each other’s internal state. For instance, if
an agent follows a transition, it will assume that all
other agents in the corresponding state do the same.
This assumption is corrected once an agent receives a
message containing the plan base of another.
A specific repair rule is used to handle cases where
the utility of a plan in execution is believed to be com-
paratively low. In this case, the current utility of the
plan is compared with the potential best utility achiev-
able by reallocating all involved agents. We present
this rule in more detail as it is of major importance
to the evaluation in Section 5. Given the utility func-
tion U
p
of the plan in question, the belief base B of
the agent containing the allocation T of p, the agent
adopts a new allocation T
0
= TAlloc(a, p|B \ T ) if
U
p
((B \ T ) ∪ T
0
) − U
p
(B) − Di f (p, T, T
0
) > t
p
holds, where t
p
is a plan specific threshold and Di f is
a similarity measurement over allocations.
Di f (p, T, T
0
) =
1 −
|{a|In(a, p, τ, z) ∈ T ∧ (∃z
0
)In(a, p, τ, z
0
) ∈ T
0
}|
|T
0
|
Both the threshold and the similarity measurement are
used to stabilise an assignment once it is adopted.
5 EVALUATION
We integrated ALICA into a software framework for
autonomous robots and use it to control a robotic team
in the RoboCup Midsize league. The execution loop
of each robot has a frequency of 30Hz. Each cycle,
a robot has to process new sensory data and incom-
ing messages, update its belief base, check and ap-
ply transitional rules, and execute behaviours. Every
robot peridiocally broadcasts its plan base and parts of
its belief base, more specifically, believed positions of
all objects the utility functions depend on. This infor-
mation is sent with a frequency of 10Hz
1
.
Message delay has a direct impact on the coopera-
tive behaviour, since received data are integrated into
the belief base regardless of the message’s age. This
is done intentionally, to foster the conclusions we can
draw from experimental data. The initial allocations
of newly entered plans are protected by discarding
contradicting messages for 250ms. This ensures that
a calculated allocation has a minimal life cycle, and is
not immediately overwritten by delayed messages.
Our approach was evaluated in the robotic soccer
domain. The evaluation presented here is two-fold.
First we present results obtained in a simulated en-
vironment, with unreliable network due to packet loss
or delay. Delay and packet loss were artificially added
for clean results. Second, we present results obtained
under real-world conditions during the RoboCup ’09.
In the simulation, six agents play soccer coopera-
tively. In order to have reproducible results, there is
no opponent team. The sole plan with a dynamic util-
1
The frequency is chosen as to keep the network load
low.
TOWARDS A COMPREHENSIVE TEAMWORK MODEL FOR HIGHLY DYNAMIC DOMAINS
125
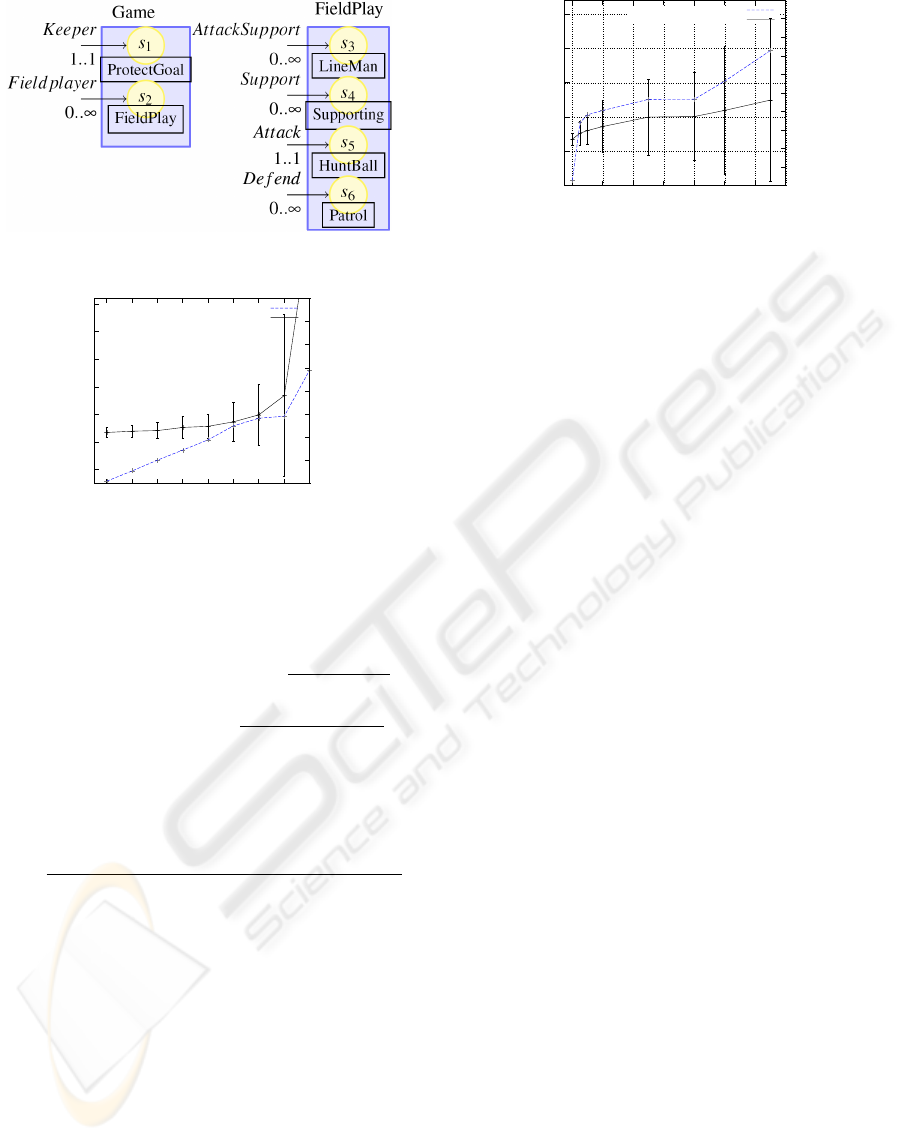
Figure 2: Simple Example Plan in the Soccer Domain.
-500
0
500
1000
1500
2000
2500
0 10 20 30 40 50 60 70 80
1
1.25
1.5
1.75
2
2.25
2.5
2.75
3
Average Time To Coordinate (ms)
Average Belief Count
Packet Loss (%)
Average time
Average belief count
Figure 3: Average Times To Coordinate and Average Belief
Count with Packet Loss.
ity function (U
FP
) in this test is depicted in Figure 2.
U
FP
= 0.1Pri + 1.0 max
x∈Attack
(1 −
Dist(x, Ball)
FieldSize
)
+0.2 max
y∈De f end
(1 −
Dist(y, OwnGoal)
FieldSize
)
where FieldSize refers to the maximal possible dis-
tance on the football field. Pri sums over the prefer-
ences of each agent’s roles towards their tasks.
Pri =
∑
τ∈Tasks(p)
∑
In(x,p,τ,z)
max
HasRole(x,r)
Pref(r, τ)
∑
τ∈Tasks(p)
∑
In(x,p,τ,z)
1
We use two measures, “Time To Coordinate”
(TTC) refers to the average length of the time inter-
vals, the team was in disagreement about the allo-
cation within plan FieldPlay. “Belief Count” (BC)
refers to the average number of different allocations
believed by at least one robot. In the used data,
the average frequency of events requiring an alloca-
tion change was about 7.8 per minute. The simulator
caused these events by resetting the ball’s position.
Figure 3 illustrates the influence of packet loss on
the two measures. Under perfect conditions, TTC
is 177ms, with a standard deviation of 89ms. BC is
1.028 with standard deviation of 0.22. TTC slowly
increases till packet loss is at 50%, at which point
TTC is at 370ms with standard deviation of 352ms.
-500
0
500
1000
1500
2000
0 200 400 600 800 1000 1200 1400
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
Average Time To Coordinate (ms)
Average Belief Count
Packet Delay (ms)
Average time
Average belief count
Figure 4: Average Times To Coordinate and Average Belief
Count with Packet Delay.
Beyond this point, the curve steepness increased. At
80% packet loss, TTC is already at 3894ms and co-
ordination hardly occurs any more. Note that the
standard deviation of TTC follows the same pattern.
This is due to the increasing likelihood that two dis-
agreement intervals overlap and the increasing noise,
which introduces additional small disagreement pe-
riods. The belief count on the other hand proves to
be more resistant against packet loss, it grows linear
with the amount of packet loss. The same holds for
its standard deviation, which reaches 1.0 at 60% loss.
The relationship between packet delay and the
two measures is shown in Figure 4. Packet delay
was introduced with a uniformly distributed noise in
[−25ms, 25ms]. After an initial steep ascend of both
TCC and BC in the interval from 0ms to 50ms delay,
both measures grow only slowly with additional de-
lay. At 50ms, TTC is 263ms with a standard deviation
of 177ms, and BC equals 1.34 with standard devia-
tion of 0.7. Afterwards, deviation of BC stays almost
constant while the deviation of TTC continues to rise.
Again, this is due to intervals overlapping and delayed
messages inducing short periods of disagreement.
The most interesting fact here is the initial ascend
of the two measures. This indicates a benefit of dis-
carding messages older than a certain time span, as
the data indicate a delay of 100ms is as bad as packet
loss of 40%. Note that, when in disagreement, the
robots still act, at no point in time a robot did not try to
fulfil a task. In summary, with disagreement periods
of 177ms under perfect conditions, 370ms under 50%
packet loss, and 361ms under 200ms delay, we can
state that the agents not only react quickly to changes
in the environment but also achieve agreement about
the task allocation quickly and hence act and cooper-
ate according to the modelled plans.
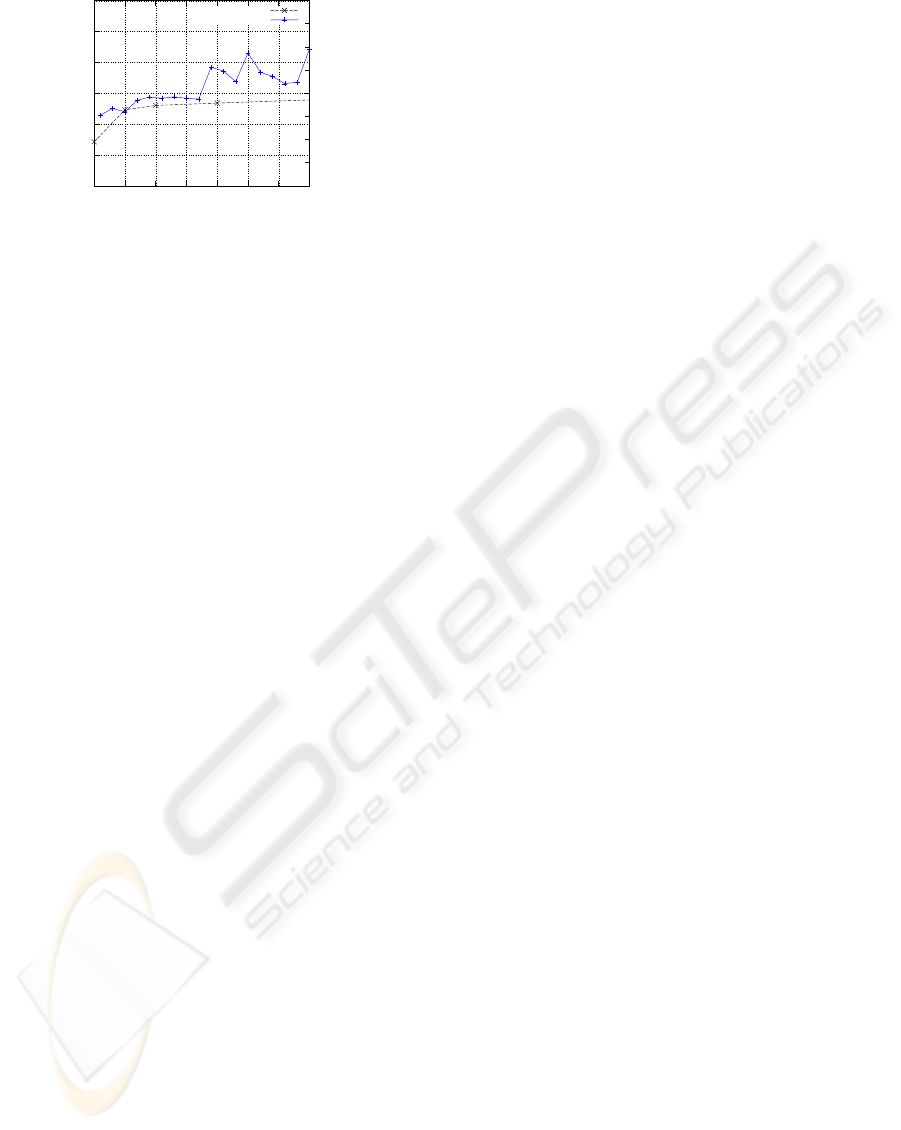
Figure 5 shows the average belief count during ac-
tual soccer matches. The data are normalised by the
number of robots involved. For comparison, simula-
tion results are shown as well. The data was gathered
from 226.6 minutes of game play. Unfortunately, the
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
126
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0 50 100 150 200 250 300 350
1
1.25
1.5
1.75
2
2.25
2.5
2.75
3
Average Belief Count per Robot
Average Belief Count
Average Packet Delay (ms)
WC 2009
Simulation
Figure 5: Normalised Average Belief Count vs Packet De-
lay during RC 2009.
network quality fluctuated to quickly to draw mean-
ingful TTC values from the data collected. In aver-
age, a disagreement lasted for 300ms, i.e., 3 commu-
nication cycles. They occurred 22.8 times per minute.
Hence, in 11% of the time, a disagreement over the al-
location existed. Given the dynamic character of the
domain, reflected by the fact that each robot modi-
fied its plan base to accommodate a new situation 17.5
times per minute, we deem this acceptable.
Compared with the simulation, the conditions are
harder, as the game is faster and much more dynamic.
Also, sensor noise degrades the coherence of informa-
tion used for team coordination. Especially in close-
quarter situations, our robots disregarded communi-
cated data in favour for local sensor data. This led to
breakdowns in the teamwork. Hence, it is imperative
to use fused information only for task allocations in
order to guarantee resolution of such conflicts.
However, the average belief count during the
RoboCup corresponds to the simulation data, even
though the plans employed during the RC were
more complex. Not only allocated the robots them-
selves within one plan, but also did they choose au-
tonomously the same plan out of a plan type. In gen-
eral, three plans were available on the level of Field-
Play, two defensive and one aggressive. This is a
small indicator that the approach scales well with the
complexity of the employed plans. A situation from
an actual game displaying dynamic allocations can
be found under http://www.youtube.com/watch?
v=3V_vedh95kc.
6 CONCLUSIONS
In this paper, we sketched a new language for describ-
ing multi-agent plans together with an operational se-
mantics. This language is geared towards highly dy-
namic domains in which agents have to take decisions
under tight time constraints. Such domains often oc-
cur in robotic scenarios. We presented how agents can
estimate their team mates’ decisions, act upon them,
and correct them when new information is available.
We showed experimentally that this approach is ro-
bust against a high degree of packet loss and delay,
common properties of communication in robotic sce-
narios.
Several open questions remain. It is still unclear
how coordination is affected if several domain prop-
erties, which are not observable by all agents, are used
for utility and condition calculations. We believe that
the approach employed by STEAM, namely commu-
nicating failures together with their reason, is a suit-
able method to foster coordination in this case. Fi-
nally, an embedding of ALICA into 3APL is work in
progress.
REFERENCES
Bratman, M. (1987). Intentions, Plans, and Practical Rea-
son. Harvard University Press.
Grosz, B. J. and Kraus, S. (1996). Collaborative plans
for complex group action. ARTIFICIAL INTELLI-
GENCE, 86(2):269–357.
Grosz, B. J. and Sidner, C. L. (1990). Plans for discourse.
In Intentions in Communication. MIT Press.
Hindriks, K. V., Boer, F. S. D., Hoek, W. V. D., and Meyer,
J.-J. C. (1999). Agent programming in 3APL. Au-
tonomous Agents and Multi-Agent Systems, 2(4):357–
401.
Levesque, H. J., Cohen, P. R., and Nunes, J. H. T. (1990).
On Acting Together. In Proc. of AAAI-90, pages 94–
99, Boston, MA.
Pynadath, D. V., Tambe, M., and Chauvat, N. (1999).
Toward team-oriented programming. In Intelligent
Agents VI: Agent Theories, Architectures, and Lan-
guages, pages 233–247.
Skubch, H., Wagner, M., and Reichle, R. (2009). A lan-
guage for interactive cooperative agents.
Tambe, M. (1997). Towards flexible teamwork. Journal of
Artificial Intelligence Research, 7:83–124.
TOWARDS A COMPREHENSIVE TEAMWORK MODEL FOR HIGHLY DYNAMIC DOMAINS
127
