
RESEARCH AND DEVELOPMENT OF CONSCIOUS ROBOT
Mirror Image Cognition Experiments using Small Robots
Takashi Komatsu and Junichi Takeno
Robot Science Laboratory, Meiji University, 1-1-1 Higashimita, Tama-ku, Kawasaki-shi, Kanagawa, 214-8571, Japan
Keywords: Cognition and Behavior, Consciousness, Mirror image, Self aware, Neural Networks, Robotics.
Abstract: The authors are trying to transplant a function similar to human consciousness into a robot to elucidate the
mystery of human consciousness. While there is no universally accepted definition of consciousness, we
believe that a consistency of cognition and behavior generates consciousness, based on the knowledge we
gained in such fields as brain science and philosophy in the course of our study. Based on this idea, we have
developed a module, named MoNAD, which comprises recurrent neural networks and can be used to
elucidate the phenomena of human consciousness. We focused on mirror image cognition and imitation
behavior, which are said to be high-level functions of human consciousness, and conducted experiments that
had the robot imitate the behavior of its mirror image. This paper reports on the results of our additional
tests using a new type of robot and basic experiments on discriminating a part of the self from another robot.
We found that our experiments on mirror image cognition did not depend on the type of robot used,
however the time delay when transmitting control signals to the other robot was an important factor that
affected our evaluation of the robot’s discriminating the self from the other robots.
1 INTRODUCTION
Human consciousness has been studied in
philosophy, psychology, brain science in the past. In
recent years, there has been an awareness that
human consciousness is closely related to
embodiment. From this new perspective, researchers
have started to study consciousness using robots
with bodies. As mentioned above, although there is
no clear-cut definition of consciousness, we will
gradually understand what human consciousness, the
mind and feelings are through our efforts toward
achieving the function of consciousness in a robot.
Eventually, we will be able to develop a perfect
robot that possesses high-level, human-like
functions.
Believing that achieving self-consciousness is
the most important goal, we decided to simulate the
phenomenon of being aware of one’s image in a
mirror, which is a proof of the existence of self-
consciousness, using a robot. As the first step, we
studied several aspects related to consciousness and
imitation behaviors of humans. An example of
imitation behavior is a mirror neuron (Gallese,
1996). The authors believe that the mirror neuron
mechanism has a relationship with imitation
behavior. The authors further believe that
development of consciousness is closely related to
imitation as evidenced by many studies on
consciousness and imitation behavior typically
represented by Mimetic theory. (Donald, 1991)
Based on this belief, we devised the conscious
system Module of Nerves for Advanced Dynamics,
or MoNAD . The robot equipped with this conscious
system calculates data obtained from sensors using
the MoNADs of the conscious system, and
represents the condition of the self and the other.
The robot imitates the behavior of the other and
cognizes the self using information obtained as
feedback from its imitation behavior. Mirror image
cognition, one of the functions of consciousness,
will be achieved using imitation behavior and
cognition of the self. We have already succeeded in
experiments on mirror image cognition using a
robot. That was a commercial small robot Khepera
II. (Takeno, 2003), (Takeno, 2005) Later, the robot’s
feelings were incorporated into the conscious system
as a subsystem (Shirakura, 2006), (Igarashi, 2007).
Additional mirror image tests and new experiments
on evaluating the robot’s discrimination of the self
from others were conducted using new robots. The
mirror image cognition experiments were again
successful thanks to the functions of emotion and
feelings incorporated in the new conscious system.
479
Komatsu T. and Takeno J. (2010).
RESEARCH AND DEVELOPMENT OF CONSCIOUS ROBOT - Mirror Image Cognition Experiments using Small Robots.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 479-482
DOI: 10.5220/0002702504790482
Copyright
c
SciTePress

2 MONAD CONSCIOUS
MODULE
The MoNAD conscious module is a computation
model using neural networks (Figure 1) (Figure 2).
Specifically, it consists of a cognition system (a),
behavior system (b), primitive representation (c),
symbolic representation (d), and two sets of inputs
and outputs. The cognition system (a) calculates the
current cognition using information p1 from external
sensors (or information from other conscious
modules), feedback information M’ from own
behavior, and cognition information p2 from one
step before. The behavior system (b) calculates the
behavior from input information (S), M’ and p2. The
primitive representation (c), where both the
information (a) and (b) coexist, is the central core of
the MoNAD that achieves consistency of cognition
and behavior. The symbolic representation (d) is the
layer where the information cognized by the
cognition system (a) is represented. There are two
types of representation: cognition representation
(RL) and behavior representation (BL). Cognition
representation (RL) is the representation currently
being cognized. RL information is constantly being
copied to the behavior representation (BL) and is
used for generating the next cognition, provided that
no other information is given to BL from other
conscious modules. RL and BL are terminals that
connect other MoNADs. They support exchange of
information with higher-level modules.
A robot can be embodied (capable of
acknowledging its own somatic sensation as
information) by inputting the feedback information
(M’) from the output into the MoNAD module that
comprises the conscious system and is described in
the next chapter. A high-level conscious function
can be achieved by connecting multiple MoNADs.
Each MoNAD has its own target orientation. The
MoNAD is proactively taught about its orientation
through supervised learning.
Output(M)
Input(S)
Input
Output
p1
p2
p4
p3
(d)
(a)
(b) (c)
RL
BL
M’
Figure 1: MoNAD Concept Model.
Output(M)
Input(S)
Input
Output
p1
p2
p4
p3
(d)
(a)
(b)
(c)
RL
M’
BL
Figure 2: MoNAD Circuitry.
3 CONSCIOUS SYSTEM
3.1 Structure of the Conscious System
The conscious system comprises multiple MoNADs.
Specifically, the conscious system consists of three
subsystems: reason (e), emotion-feelings (f) and
association (g) (Figure 3). The reason subsystem (e)
is responsible for conducting and representing
rational behavior for the target orientation in
response to external stimuli and somatic sensory
information. The emotion-feelings subsystem (f)
represents feelings in accordance with emotional
information generated by external stimuli and
changes in the state of the robot’s body. The
association subsystem (g) integrates the rational and
emotional thoughts. Living organisms are said to
generate emotions in response to external and
internal stimuli, and the emotions are deeply related
to decision-making and adjustment of bodily
functions. The authors therefore developed the
emotion-feelings subsystem by combining MoNADs
that represent fundamental emotions and feelings
(Shirakura, 2006), (Igarashi 2007).
(h) Pain
(i) Solitude
(j) Pleasant
(k) Unpleasant
(g) Associatio
n
(e) Imitation Behavior
Input(External)
Input(External)
Input(Internal)
Output
Reason
Emotion
-Feeling
Association
(f)
Figure 3: Conscious System Performing Mirror Image
Cognition.
3.2 Development of Conscious System
for Performing Mirror Image
Cognition
To successfully develop a robot with self-awareness,
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
480

the authors think it necessary to have the robot
achieve the phenomenon of being aware of its self
image in a mirror using the conscious system. Six
MoNADs were used in the conscious system in our
experiments (Figure 3). MoNAD (e), a reason
MoNAD, imitates the behavior of the image in the
mirror. MoNADs (h), (i), (j) and (k) are emotion and
feeling MoNADs. MoNAD (h) represents “Pain”
which the robot feels when it collides with the
mirror. MoNAD (i) represents “Solitude” which the
robot senses when it moves too far away from the
mirror and misses its mirror image. MoNADs (j) and
(k) are feeling MoNADs. They represent “Pleasant”
and “Unpleasant” feelings based on the information
from MoNADs (h) and (i), or whether the imitation
was successful or not. MoNAD (g), an association
MoNAD, integrates the imitation behavior
information and the information from the feeling
MoNADs.
External inputs entering the conscious system
include information on the state of the mirror image
and information captured by external sensors.
Internal inputs are somatic sensations and
information from the emotion-feelings subsystem.
The input values are calculated at the respective
MoNADs. The information represented by the
results of the calculation is transmitted to the higher-
level MoNADs and finally integrated at the
association MoNAD to calculate the representation.
The representation is an integration of rational and
emotional thoughts.The behavior information
generated in the association MoNAD is reflected
from the association MoNAD to the respective
lower-level MoNADs. The behavior of the lower-
level MoNADs is determined by this information.
Eventually, a command to implement the selected
behavior is given to the drive motors embedded in
the robot body. This describes the steps comprising
the entire process of cognition behavior of the
conscious system.
4 MIRROR IMAGE COGNITION
EXPERIMENTS
The authors conducted the mirror image cognition
experiments using the e-puck mini mobile robots.
We installed the conscious system introduced in the
preceding chapter in these robots. The robot
cognizes its surrounding environment using the
built-in infrared sensors and the robot’s action is
decided by the conscious system. The robot
advances, backs up and stops using the built-in
motors. A touch sensor is mounted on the front of
the robot to detect collision with the mirror.
Experiment 1: Conscious robot A is positioned in
front of a mirror where it conducts imitation
behavior while watching its mirror image A’.(Figure
4)
Figure 4: Experiment 1.
Experiment 2: Conscious robot A and Robot B
are connected by control cables. Robot B is
physically almost same as robot A. Robot B behaves
in the same manner as Robot A in response to
commands from Robot A. The two robots are
positioned facing each other, and Robot A watches
Robot B and imitates its behavior. (Figure 5)
Figure 5: Experiment 2 and 3.
Experiment 3: A time delay was intentionally given
to the control signals transmitted via the cables. All
other conditions were identical with Experiment 2.
Experiment 4: Conscious robots A and C were
placed facing each other. Each robot imitated the
behavior of the other robot (Figure 6).
Conscious robot A measures the rate of
coincidence of mutual imitation behavior between
the two robots.
Figure 6: Experiment 4.
RESEARCH AND DEVELOPMENT OF CONSCIOUS ROBOT - Mirror Image Cognition Experiments using Small
Robots
481
5 CONCLUSIONS
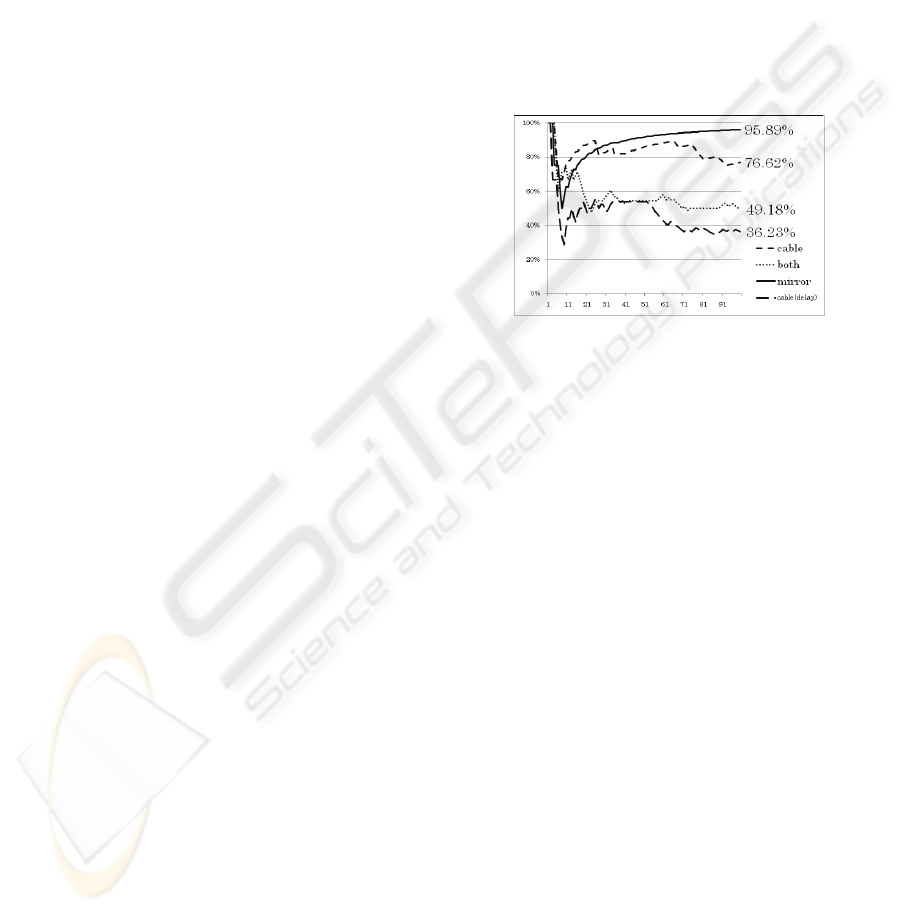
In Experiments 1 through 4 described above, the
conscious robot measured the behavior coincidence
rate between the self and the other robot (Figure 7).
The coincidence rate was about 95% in
Experiment 1, and about 76% in Experiment 2, and
about 36% in Experiment 3, and about 49% in
Experiment 4.In Experiment 1, successful mutual
imitation continued steadily without the robots
missing the image of the self in the mirror, except in
the initial stage where false detection occurred. In
Experiment 2, the coincidence rate was temporarily
higher than that of Experiment 1, but gradually
dropped due to shifting of motion between the two
robots and the resulting false detection. In
Experiment 3, where a time delay was intentionally
given to the control signals (to delay the motion of
the other robot), the coincidence rate dropped
continually. This particular experiment was
conducted to identify to what extent the robot could
cognize a part of its body to be a part of itself. In the
graph, we can see the point where the coincidence
rate with the time delay dipped lower than the
coincidence rate of Experiment 2. This is the point
where the robot had to abandon the cognition of the
image being a part of the self, and it started
considering the image to be the other. We have not
yet drawn any conclusions about this evaluation, and
acknowledge that further study is necessary.
The results of these experiments show that robot
A, with its built-in conscious system, could
determine that its mirror image A’ (Experiment 1)
was closer to itself than a part of its body B
(Experiment 2), and that robot C, with nearly
identical functions to robot A (Experiment 4), was
able to determine that mirror image A’ was none
other than itself. The authors believe that it is
possible to achieve self-consciousness in their
conscious system because of these successful mirror
image cognition experiments. Following on the
Khepera II experiments, we successfully conducted
more advanced experiments using the e-puck robot.
These results show that our conscious system has the
potential of generating conscious functions not only
in one type of robot but also universally on all types
of robots.
6 ADDITIONAL DISCUSSION
The conscious robot developed by the authors
cognizes mirror images with a high success rate of
95%. The robot avoided disturbances consciously
because we added feelings to the conscious system.
However, the robot did not change its behavior until
it actually encountered a disturbance. (Igarashi,
2007)
In the future, if the conscious system can learn
by itself the various disturbances that the robot may
encounter, the robot may be able to change its
behavior by anticipating such disturbances. The
authors believe that robots will eventually be able to
avoid unknown disturbances. Expectation and
prospect are functions of human consciousness and
are important themes in the study of human
consciousness. An expectation function is already
implemented in the MoNAD proposed by the
authors, but further study is needed to achieve long-
term expectation in robots using this MoNAD.
Figure 7: Result of Experiments.
REFERENCES
Igarashi, R, Suzuki, T, Shirakura, Y, Takeno, J., 2007.
Realization of an emotional robot and imitation
behavior. The 13th IASTEND International
Conference on Robotics and Applications, RA2007,
pp.135-140.
Donald, M., 1991. Origins of the Modern Mind. Harvard
University Press, Cambridge.
Gallese, V, Fadiga, L, Fogassi, L, Rizzolatti, R., 1996.
Action recognition in the premoter cortex. Brain 119,
pp.3-368.
Shirakura, Y, Suzuki, T, Takeno, J., 2006. A Conscious
Robot with Emotion. The 3rd International Conference
on Robots and Agents, ICARA2006, pp. 299-304,
Dec.
Takeno, J, Inaba, K., 2003. New Paradigm ‘Consistency of
cofnition and behavior’. CCCT2003, Proceeding Vol.1,
ISBN 980-6560-05-1, pp.389-394.
Takeno, J, Inaba, K, Suzuki, T., 2005. Experiments and
examination of mirror image cognition using a small
robot. The 6th
IEEE International Symposium on
Computational Intelligence in Robotics and
Automation, pp.493-498 CIRA 2005, IEEE Catalog:
05EX1153C, ISBN 0-7803-9356-2, June 27-30, Espoo
Finland.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
482
