
MULTIAGENT COORDINATION IN AD-HOC NETWORKS
BASED ON COALITION FORMATION
1
1
Samir Aknine,
2
2
Usama Mir and
3
Luciana Bezerra Arantes
1
LIESP, Université Claude Bernard Lyon1, 43 Boulevard de 11 Novembre, 1918, 69622, Lyon, France
2
ICD/ERA, FRE CNRS 2848, Université de Technologie de Troyes, 12 rue Marie Curie, 10010 Troyes Cedex, France
3
LIP6/INRIA, CNRS, Université Pierre et Marie Curie, 104 avenue de President Kennedy, 75016 Paris Cedex, France
Keywords: Multiagent Systems, Coalition FORMATION, Mobile Ad-hoc Networks.
Abstract: This research investigates the problems of agent coordination when deployed in highly dynamic
environments such as MANETs (Mobile Ad-hoc NETworks). Several difficulties arise in these
infrastructures especially when the devices with limited resources are used. All the constraints of agents’
development must thus be reexamined in order to deal with such situations, especially due to the
opportunistic mobility of nodes. In this paper, we thus propose a new multiagent coordination mechanism
through agent coalition formation for such an environment. In order to validate it, evaluation performance
tests have been conducted on an application devoted for the assistance of hospital patients and their results
are also presented in the paper.
1 INTRODUCTION
This paper addresses the problem of dynamic
coalition formation in multiagent systems deployed
on ad-hoc networks. Several intrinsic difficulties
arise in using these original infrastructures, which
require reexamining in depth agent coordination
issues. Indeed ad-hoc networks (Akyildiz, 2009) or
mobile ad-hoc networks (MANET), comprise a set
of mobile, autonomous nodes, which are
interconnected using wireless links. The adaptive
behavior of MANETS allows a network quickly
reorganize itself even under the most unfavorable
conditions. The topology in MANETs is dynamic,
and to coordinate, nodes need sophisticated
protocols that can cope with topology changing
problems.
On the other hand, the main purpose of using
multiagent systems (MAS) is to collectively reach
goals that are difficult to achieve by an individual
agent or in other words to achieve coordination
(Hsieh, 2009)(Jennings, 1994) amongst the agents.
In systems composed of multiple autonomous
agents, coordination is a key form of interaction that
enables groups of agents to arrive at a mutual
agreement regarding some beliefs, goals or plans.
However due to resource constraints, agents are
generally selfish and try to maximize their benefits.
In this paper, we study agent coordination based on
coalitions. An attractive question is the way in which
these coalitions are formed in these specific
infrastructures. Furthermore, one of the central
problems is the study of the agents’ payoffs whether
the proposed solution is efficient.
For coordination between the agents in
traditional wired networks such as Ethernet, ADSL,
there already exist several mechanisms like contract
net and its extensions (Hsieh, 2009), coalition
formation (Tsvetova, 2001), etc. However, such
protocols are not suitable to MANET since they do
not handle the dynamics of this networks where
nodes can move, join or live the network. In fact,
some related research on this problem is done in
(Wang, 2005)(Christine, 2004), but these works
don’t really address the problems of mobility of
nodes i.e. nodes leaving and joining the
environment. In this paper, we propose a new
mechanism which handles the problem of nodes
mobility and agent coalition formation.
The novelty in our work is the introduction of
dynamic coalition formation mechanism for solving
nodes’ mobility problem in MANET. We show that
this mechanism is time efficient and it provides
better payoff for the nodes in much sophisticated
and generalized way. The rest of the paper is
structured as follows: Next section presents the
review of the existing solutions. Section 3 describes
our context with the help of an example. Section 4
241
Aknine S., Mir U. and Bezerra Arantes L. (2010).
MULTIAGENT COORDINATION IN AD-HOC NETWORKS BASED ON COALITION FORMATION.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 241-246
Copyright
c
SciTePress

focuses on the proposed mechanism and section 5
and 6 delineate the implementation results, and a
conclusion respectively.
2 RELATED WORK
One of the approaches used for object oriented
coordination in ad-hoc networks is presented in
(Cutsem, 2007). This work considers a loosely
coupled object-oriented coordination abstraction,
named as an ambient reference (AR). AR initiates a
service discovery request for a remote object
exported as a music player and whenever a node
leaves the environment, the AR is rebounded to point
to another principal object in the network. A similar
sort of solution is proposed in (Christine, 2004),
where the concept of Egospace (which is a kind of
middleware for addressing the specific needs of the
agents) is explored. All the available data in the
network is stored in a common data structure and
whenever the agents move within their
communication range their local data structure is
merged to form a global view. Some other related
solutions based on the common data structure for
handling nodes’ inaccessibility in an ad-hoc network
are considered in (Cao, 2006) and (Sislak, 2005).
The above mentioned solutions fulfill few of
their results by handling some aspects related to
mobility, but still there exists a problem of agents’
shallow knowledge which does not represent their
preferences, intentions and allocation of resources.
To address this issue, Advertising on Mobile phones
ADOMO (which is a partially agents’ coordination
approach) is proposed in (Carabelea, 2005).
ADOMO uses sending and receiving of agents’
messages to address mobility issues. Another ad-hoc
coordination approach has been proposed in (Wang,
2005), where the concept of agent based Peer-to-
Peer (P2P) fostering is used for handling the
problems like nodes dropping out and mobility.
Other then ad-hoc networks, work done by Soh
et al, related to MAS learning via coalition
formation is also worth mentioning here. In (Soh,
2006), they have proposed a computer-supported
cooperative learning system in education and the
results of its deployment. The system consists of a
set of teacher, group, and student agents.
Specifically, their appraoch uses a Vickrey auction-
based and learning-enabled algorithm called
VALCAM to form student groups in a structured
cooperative learning setting. The approach has the
traditional limitation of Vickrey auctions which does
not allow agents for price discovery, that is,
discovery of the market price if the agents are unsure
of their own valuations, without sequential auctions.
Nevertheless, all the aforementioned coordination
solutions do not behave well on environment with
highly dynamics where agents need to have both the
capabilities of coordination and device failure
handling, these approaches fall short of giving a
generalized solution.
3 PROBLEM DESCRIPTION
This section explains the mobility arising problem
and presents an example to illustrate our approach.
We are considering here the example of a hospital
where software agents are deployed on several
devices (figure. 1). In this figure, the chargers (Cr
1
,
Cr
2
… Cr
i
), patients’ wheelchairs (W
1
, W
2
… W
j
),
laptops (L
1
, L
2
… L
k
), cardiac monitors (M
1
, M
2
…
M
f
), etc., are mobile in a sense that the staff or the
patients can move them from one place to another,
according to their requirements of use or charging.
For the purpose of coordination and for
exchanging energy (charge) between the devices,
agents are deployed at each of them. Agents need
coordination if they require more energy in their
devices or if they need to remain connected with
other agents in the MANET. Each agent a
i
has its
payoff function F
i
, which is maximized by its charge
consumption and the rewards it gets after performing
its tasks. Deployed agents start coordination if they
consider that there is not enough energy left to move
further and to achieve their tasks or if they require
multi-hop communications with other agents in their
environment.
Figure 1: Agents’ connections in ad-hoc infrastructure.
To give an example, let’s consider a wheelchair,
a cardiac monitors, and a charger which have agreed
upon communication and charge sharing using some
protocols, and suddenly a staff member comes and
takes the charger away for giving charge to some
other wheelchairs, at a different place. One node of
this MANET can tell the other nodes by using some
sort of routing protocols e.g. ADODV and DSR or by
using agent communication approaches, that it is
leaving the environment. However the problems of
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
242

charge losing and communication breakage still
remain there, since current approaches and protocols
do not guarantee the resolution of such problems
under these conditions.
4 METHOD OF RESOLUTION
As mentioned in previous sections, the main concern
of our work are to handle the mobility of nodes in a
MANET, so that the agents deployed on them can
still communicate and coordinate effectively and
their energy sharing continues without any breakage.
In this section, we present our solutions to the
mentioned problem mainly based on coalition
formation.
4.1 Notations and Definitions
Before going further in the presentation of our
mechanism, let’s introduce some definitions. Let A
be a set of agents. The payoff function F
i
of each
agent a
i
measures the expected achiveable payoff of
a
i
for each proposal p
j
. Every agent a
i
knows its
reference state r
i
for which the expected payoff is
minimal and tries to maximize F
i
. We assume that
each a
i
of A is selfish and has a set of goals G
i
= {g
1
,
g
2
, ..., g
m
} which it aims to achieve. There is one
agent per node and agents communicate through
message passing. Every agent a
i
of A holds in its
view, v(a
i
), a list of agents it can contact, as well as
the communication cost for contacting them. This
cost varies depending on the type of communication
used (either single or multi-hop communication). H
is the function that measures the cost of these
communication hops. However, as nodes can leave
or join the system, the view of an agent changes
dynamically. By periodically checking the aliveness
of its neighbors, an agent can update its view and
exclude those agents that do not belong to the
system anymore. In this model:
A coalition is a tuple C= <A
c
, G
c
> where A
c
= {a
1
,
a
2
... a
k
} is a set of agents of A that agreed to perform
a set of goals G
c
.
Every agent might simultaneously belong to several
coalitions in order to reach its own goals. We
consider then that:
A coalition structure, CS, is a set of coalitions {c
1
,
c
2
… c
k
} such that
A
c
(c
i
)
A, and
G
c
(c
i
)
G
where c
i
CS.
As the system is deployed on an ad-hoc
infrastructure and the agents are selfish, a coalition
formation process does not necessarily search to
satisfy all goals of every agent in A. Mainly, each
agent a
i
approves the coalition structures that satisfy
its own payoff function F
i
. Hence:
An approved coalition structure CS is considered
by each agent a
j
of CS to be either a complete
solution, if all a
j
’s goals in G
j
are satisfied by CS, or
a partial solution, if some of its goals are not
considered by CS.
An agent a
i
that has approved some partial solutions
k
is totally satisfied if
k
k
deals with all its
constraints on its goals in G
i
.
4.2 Coalition Formation Mechanism
Before defining our protocol, let’s introduce other
concepts:
Coalition agreement. An agent participating in a
coalition formation process approves a coalition
structure or a coalition (i.e. singleton coalition
structure) either because this structure represents a
partial solution or a complete solution for it.
An agreement on a coalition structure, CS, is
reached if all the agents of the CS have approved
this structure, i.e.
a
i
CS, F
i
(a
i
) is higher for
the CS when compared to its reference state r
i
.
Coalition concessions. Making concessions is
certainly the best way to reach agreements on a
coalition formation. A trivial concession is the one
where an agent a
i
approves a coalition structure CS*
for which F
i
(a
i
) is inferior to another previously
approved structure CS. Moreover, an agent can make
Pareto concessions where the payoff of at least one
participant agent can be improved with a new
approved coalition structure without deteriorating the
payoff of others. Other kinds of concessions can also
be considered, such as egalitarian measurements of
agents’ utilities, etc. It is worth noting that in
economic theory, we can find several sorts of
concessions that an agent can make within a
negotiation. In the proposed mechanism, agents focus
on different forms of concessions.
In our pessimistic ad-hoc coordination protocol
which is proposed for solving the mobility problem
by the means of coordination, each of the nodes
maintains a cache for saving temporary data about
its mobility. The agents deployed on them update
this cache with the latest probability information
about their movements or stability (Prob
mins
). In the
coalition formation problem, each agent makes its
proposals of coalition structures and must reach with
others agreements on those which will be adopted
such that the following conditions are satisfied: (1)
validity: if an agent adopts a CS then this CS have
been agreed on by its forming agents; (2) Agreement:
no agent reaches an incoherent state after deciding;
and (3) termination: every agent eventually decides.
MULTIAGENT COORDINATION IN AD-HOC NETWORKS BASED ON COALITION FORMATION
243

Let us now present the steps of the protocol:
(1) In the first round each agent a
i
, which has some
goals G
i
to achieve, initiates a coalition
formation process, p
i
, by contacting some or all
the agents of its view, i.e., its neighbors within its
one-hop communication range. a
i
builds
proposals to submit to these agents using the
information provided on their goals and
resources. Just before starting it, the initiator
agent (a
i
) sets a timer with a timeout value which
is an upper bound estimation of the time delay
that the coalition formation will take.
(2) Each agent a
j
є v(a
i
), interested in the coalition
p, seeks to make proposals either just based on
its own goals, resources and its Prob
mins
, or
initiates one or more sub-coalition formation
processes, p
i
k
, with its other one-hop neighbors
in order to be able to make further proposals to
a
i
in the current coalition process p
i
.
(3) In each subsequent round, each agent can keep
its previous proposals, or make some
concessions, or even make a new proposal. For
an agent a
j
, if its Prob
mins
is lower than an
acceptable threshold, a
j
initiates a sub-coalition
formation process, p
j
-
, with its one-hop
neighbors. The process p
j
-
allows that the
commitments of a
j
with a
i
will not be withdrawn
since at least one agent of p
j
-
will perform them if
a
i
’s node moves and F
i
(a
i
) has decreased due to
multi-hop communications with a
j
.
(4) An agent ends its negotiation phase of a given
coalition formation process in one of the
following cases: (a) a complete solution which
handles all its goals is found; (b) an agreement
is reached on a partial solution which comprises
some of its goals; (c) a conflict arises and no
agent’s concession is possible (d) the timeout
delay for the coalition formation expired.
(5) For each negotiation that successfully ended, the
agents involved in the agreed coalitions apply an
atomic commitment phase in order to validate or
give up the negotiation phase. The latter takes
place either because one or more of the involved
agents can not keep their agreements or because
the nodes have moved.
5 PERFORMANCE EVALUATION
We present in this section our results and
experiments where all the agents are in operation
together in a coordinated way under the supervision
of the proposed coalition formation model. For the
results to be efficient, the agents must provide better
payoffs of each requester which asks for its goals to
be performed. Also, total number of goals achieved
(number of successful charge sharing agreements)
and negotiation time (i.e. the total time for
communication and goal solving measured in
minutes) are the other two important parameters.
The parameters are chosen as they will testify our
approach in terms of its feasibility, efficiency,
accuracy and scalability.
The whole scenario is simulated based on the
hospital example. The simulation starts with a set of
agents in which any random agents a
i
, have some
goals G
i
to achieve (or to get charged). They initiate
a coalition formation process, p
i
, by firstly searching
and then contacting some or all the agents in their
view. After contacting, a
i
sends these agents the
information about the charge they need, setting a
timeout for reciving response. Each of the interested
agents a
j
є v(a
i
), make their proposals based on their
goal solving abilities (or charging capabilities). The
factor of Prob
mins
is considered for sending
proposals. Necessary sub-coalitions are also formed
in case the value of Prob
mins
< threshold. The main
purpose of these experiments is to show the
improvement with the required payoff (the charge
needed in the beginning) of agents and their
achieved goals or tasks (the number of charge
sharing agreements successfully completed).
0
20
40
60
80
100
120
140
0
2000
4000
6000
0
2
4
6
8
10
Number of agents
Payoffs
Negotiation time
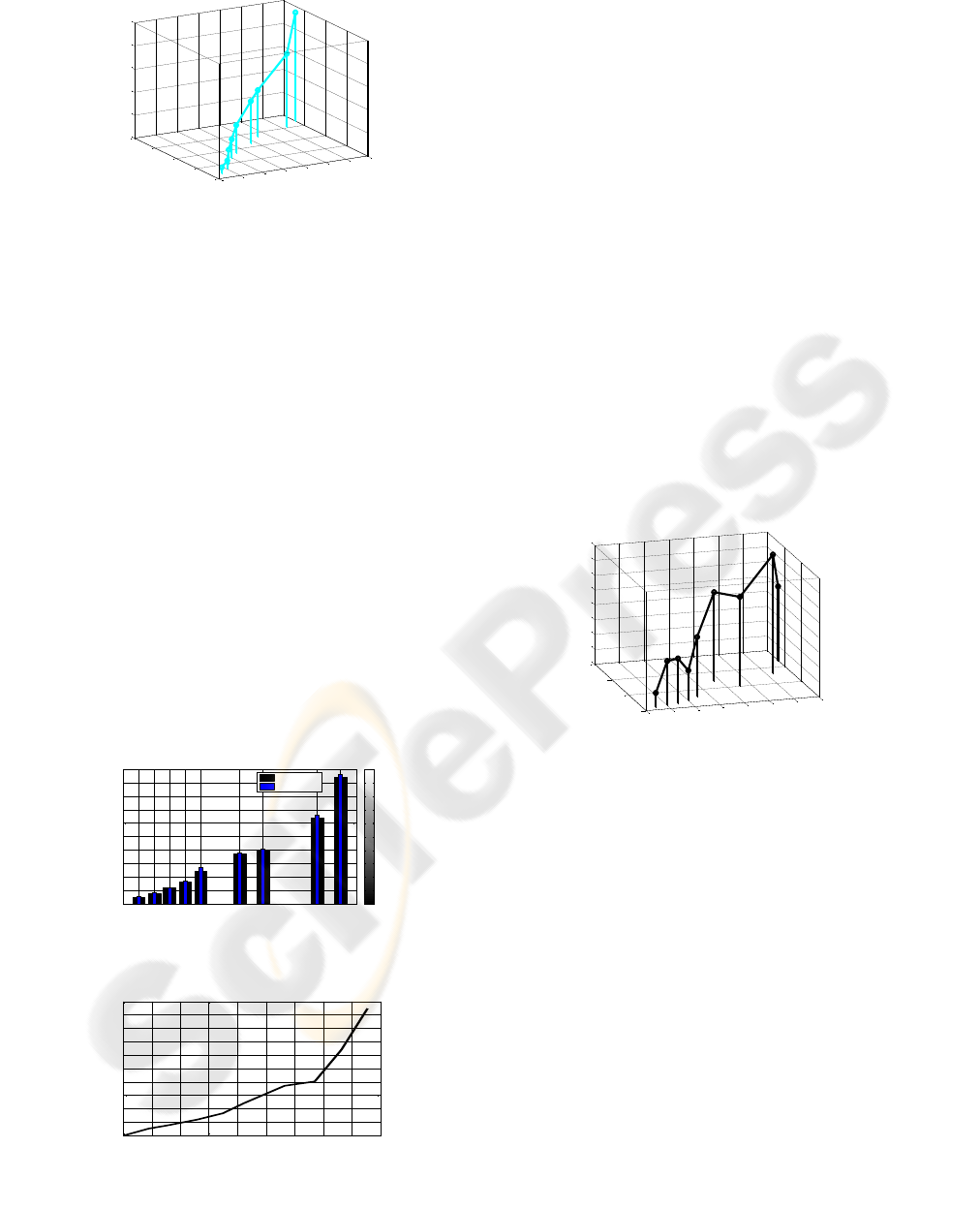
Figure 2: Comparison of achieved payoffs and negotiation
time.
Figure 2 shows a graph of several values of
achieved payoffs in relation to time by running the
simulation with varying number of agents. The
maximum time taken for negotiation and goal
solving is not more than 9.59 minutes with the
highest payoff value of 4725. Figure 3 depicts the
number of messages exchanged between the agents
when both the values of agents and their achieved
payoffs increase.
One of our objectives is to evaluate the different
values of payoffs of agents in terms of number of
messages required to achieve these values.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
244
0
20
40
60
80
100
120
140
0
50
100
150
200
0
1000
2000
3000
4000
5000
Number of agents
Number of messages exchanged
Payoffs achieved
Figure 3: Achieved payoffs with number of messages
exchanged.
Relating this aspect, two experimental graphs
have been set up. A first experiment (Figure 4) has
been conceived to compare the initial required
values of agents’ payoffs (blue lines) and the values
of payoffs they have achieved at the end (black
lines). Here, by required payoffs, we mean the sum
of various amounts of charge needed by the
participating wheelchairs, while the achieved values
of payoffs are the several amounts of charge gained
at the end. Thus, different random sets of agents
(from 10 up to 140) are generated and represented in
a 2D form. The achieved payoffs are at maximum of
1211 (over a total of 1350) when the number of
agents is in the range from 0 to 50 and exhibits less
variability on the average. Beyond 50 agents, there
is a rapid boost in the achieved payoffs reaching to a
peak value of 4725 (over total of 4800). Thus, it is
clear that almost 90-95% of the total required
payoffs have been achieved efficiently. Figure 5
depicts the number of messages exchanged between
agents, that grows with increasing values of the
achieved payoffs.
10 20 30 40 50 75 90 125 140
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Number of agents
Payoffs
Payoffs obtained
Total required payoffs
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
Figure 4: A graph comparison: Total required payoffs
versus achieved payoffs.
0 20 40 60 80 100 120 140 160 180
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Number of messages
Payoffs achieved
Figure 5: Achieved payoffs with number of messages
exchanged.
Next we present three different results that
illustrate the agents loss which they have caused in
terms of the unachieved goals (or failed tasks), time
and number of messages. In figure 6, a graph is
given with the achieved payoffs and the number of
unachieved goals. By unachieved goals we refer to
as the number of unsuccessful agreements. This
difficulty arrives when charger agents become
mobile and later they cannot find their replacements
in case of mobility. It is clear that the values of
unachieved goals are not even in the double figures,
while the achieved values of payoffs are at their
maximum peak range. Thus the flow of achieved
payoffs is higher and there are not much goal losses
when running the simulation with increased values
of agents. The experiment of Figure 7 determines
different values of unachieved goals with regard to
the number of message loss. In the figure, the losses
in terms of tasks and messages are almost leveled off
for various sets of agents (from 10 to 140) and
exhibits less fluctuating pattern on average. Even
with maximum of 140 agents the values of tasks and
message losses are 5 and 11 respectively.
0
20
40
60
80
100
120
140
0
2000
4000
6000
0
1
2
3
4
5
6
7
8
Number of agents
Payoffs
Number of tasks failed
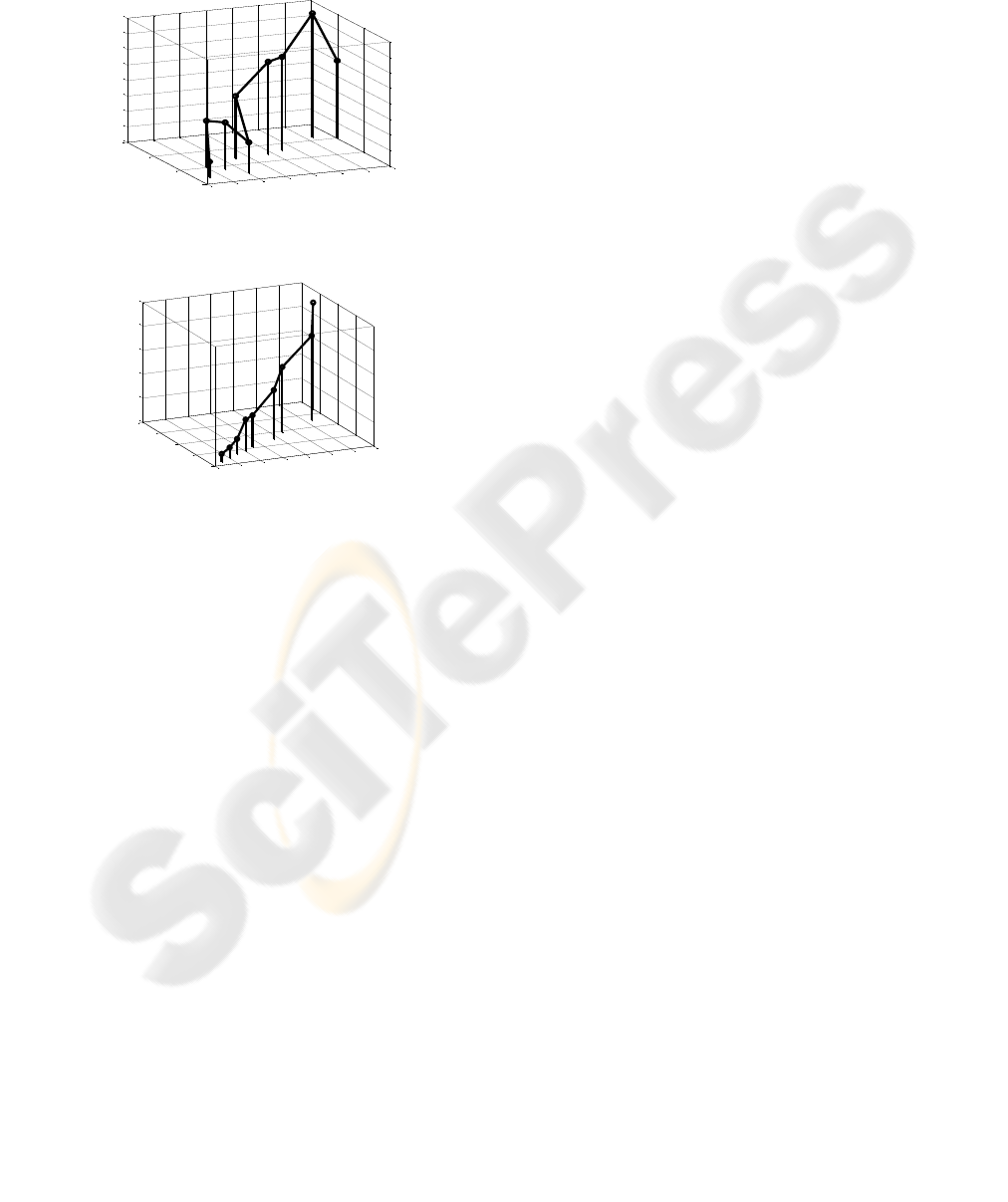
Figure 6: A graph with the achieved payoffs and number
of unachieved goals (failed tasks).
Figure 8 is drawn to compare the values of
achieved goals with their associated time values
respectively. In the figure, there is a continuous
boost in terms of achieved goals. For example if
with 10 agents, the numbers of achieved goals are 5
(out of 6), then this phenomenon continues up till
maximum of 140 agents where the achieved goals
are 67 (over 72 initiated goals). Thus a climbing
percentage of efficient results is maintained
continuously. Similarly the total time taken for 10
and 140 agents is 0.68 and 8.92 respectively, which
can also be considered as continuous.
Briefly, we studied in this section, how the
increased values of achieved goals can influence the
efficiency of our agents. Since, with the increase in
number of agents, the results are more efficient, we
expected to find that the higher the values of agents,
the higher the average values of achieved payoffs.
MULTIAGENT COORDINATION IN AD-HOC NETWORKS BASED ON COALITION FORMATION
245
Thus when using bigger scenarios (with huge
number of agents) where time is not a highly
concerned issue, with the main focus on achieving
higher values of goals and payoffs, our ad-hoc
coalition formation approach seems still an efficient
solution.
0
20
40
60
80
100
120
140
0
5
10
15
0
1
2
3
4
5
6
7
8
Number of agents
Number of tasks failed
Number of messages
Figure 7: Number of unachieved goals (failed tasks) with
the messages lost.
0
20
40
60
80
100
120
140
0
20
40
60
80
0
2
4
6
8
10
Number of agents
Tasks completed
Time
Figure 8: Number of achieved goals (successful tasks)
with their associated time.
6 CONCLUSIONS
This paper addresses the problem of nodes mobility
and the communication breakage costs, in MANET
using coalition formation through MAS
coordination. Several difficulties arise in these
infrastructures especially when devices with limited
resources are used. In order to cope with those
problems, we have developed a new coalition
formation mechanism, which addresses these issues
in an efficient manner
and increases the payoffs of each node according to
its needs. In essence, the implementation and test
results have shown that our approach can form
coalition structures in a regular and effective manner
in highly mobile conditions. The simulation results
are based on several parameters including: payoff,
coordination time, number of achieved and
unachieved goals, number of messages. Our
approach converges to an efficient position with the
increase in number of agents, reaching to even better
coordination and payoff at higher stages.
REFERENCES
Hsieh, F.-S., 2009. Developing cooperation mechanism
for multi-agent systems with Petri nets. In,
International Journal of Engineering Applications of
Artificial Intelligence. ACM Press.
Akyildiz, I. F., Lee, W-Y., and Chowdhury, K. R,, 2009.
TP-CRAHN: A transport protocol for cognitive radio
ad-hoc networks. In. INFOCOM’09, 29th Conference
on Computer Communications. IEEE Press.
Cutsem, T. V., Dedecker, J., and Meuter, W. D., 2007.
Object oriented coordination in mobile ad-hoc
networks. In. 9
th
International Conference on
Coordination Models and Languages. Springer Press.
Soh, L-K., Khandaker, N., and Jiang, H., 2006.
Multiagent coalition formation for computer-supported
cooperative learning. In. AAAI’06, 21
st
International
Conference on Artificial Intelligence. AAAI Press.
Cao, W., Bian, C- G., and Hartvigsen, G., 2006.
Achieving efficient cooperation in a multiagent
system: the twin-base modeling. In. WCIA’06, Ist
International Workshop on Cooperative Information
Agents. Springer/ACM Press.
Carabelea, C., and Berger, M., 2005. Agent negotiation in
ad-hoc networks. In. MOBIQUITOUS’05, Second
Annual International Conference on Mobile and
Ubiquitous Systems. ACM/IEEE Press.
Sislak, D., Pechoucek, M., and Rehak, M., et al, 2005.
Solving inaccessibility in multi-agent systems by
mobile middle-agents. In. International Journal on
Multiagent and Grid Systems. ACM Press.
Wang, M., Wolf, H. and Purvis, M., et al, 2005. An
agent-based approach to assist collaborations in a
framework for mobile p2p applications. In.
AAMAS’05, Autonomous Agents and MultiAgent
Systems. Springer Press.
Christine, J., and Catalin, R.G., 2004. Active coordination
in ad-hoc networks. In. 6
th
International Conference
on Coordination Models and Languages. Springer
Press.
Tsvetova, M., Sycara, K., and Chen, Y., et al, 2001.
Customer coalitions in electronic markets. In.
AMC’01, Agent-Mediated Electronic Commerce III.
Springer/ACM Press.
Jennings, N. R., 1994. Cooperation in industrial
multiagent systems. World Scientific Publishing,
London, 2
nd
edition.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
246
