
A GENERIC COGNITIVE SYSTEM ARCHITECTURE APPLIED TO
THE UAV FLIGHT GUIDANCE DOMAIN
Stefan Br¨uggenwirth, Ruben Strenzke, Alexander Matzner and Axel Schulte
Institute of Flight Systems, Bundeswehr University, Munich, Germany
Keywords:
Cognitive automation, Hybrid agent architecture, UAV flight guidance, Graph matching, Soar.
Abstract:
We present an overview of our cognitive system architecture (COSA) with applications in the multi-UAV flight
guidance and mission management areas. Our work is based on a modified version of the Rasmussen scheme,
which is an established model for human behaviour in ergonomics and cognitive systems. We belief that
modeling in close analogy with categories of human behavior simplifies human-machine interaction as well as
the knowledge engineering process. Our hybrid agent architecture is comprised of a low-level, reactive layer
with prestored procedures and a goal-oriented, deliberative layer that enables inference and dynamic planning.
The first, fully functional implementation of our architecture used production rules and the Soar interpreter,
enhanced with syntax extensions such as type-safety and class-inheritance specific to our modeling approach.
We then developed a specialized inference algorithm based on graph matching, which natively supports these
extensions and resulted in performance improvements over the original Rete algorithm of Soar. A major
weakness of our current implementation still lies in its static planning functionality which is realized by a
means-ends plan library. We discuss a concept that interleaves the planning process with knowledge about
anticipated action outcomes, followed by an interpretation of projected future world states with respect to
current goals. We illustrate this principle with a multi-UAV scenario.
1 COGNITIVE AUTOMATION IN
A MULTI-UAV SCENARIO
In the following, a scenario is considered in which
multiple simulated UAVs (Uninhabited Aerial Vehi-
cles) have to accomplish a time critical and resource
bounded military mission in a dynamic and continu-
ous environment. The mission comprises flight plan-
ning, communication activities and payload operation
tasks. We have implemented and evaluated a config-
uration in which a human team member steers one
of the aircraft and controls an uncrewed team on a
task-based level. The possible actions of the aircraft
include selecting a flight plan, loitering, performing
evasive maneuvers, payload management and sending
messages to other participants like the request to ful-
fill a task. Experiments (Schulte et al., 2008) showed
that an assistant system is required to aid the human
operator of such a multi-UAV system to avoid human
factors related problems (Rauschert et al., 2008).
In a different experimental setup a manned-
unmanned teaming (MUM-T) mission was flown with
human operators located aboard a simulated airborne
helicopter. The results showed that it generates se-
vere problems to guide the UAVs on a state-of-the-
art waypoint-based level, rather than on an abstract,
task-based level like in the system mentioned before
(Uhrmann et al., 2009). Human decision makers and
operators must trust in such a system of high auton-
omy, a fact that leads to the necessity that the system
is able to inform about its states and future behaviors
(Freed et al., 2005). For the intelligent agent to under-
stand and correctly interpret the task commands and
for the human operator to understand the agent’s feed-
back, we base our software development approach
on cognitive automation, which is described further
in (Onken and Schulte, 2009) and the following sec-
tions.
Designing technical systems which are ergonomic
and understandable for the human operator is a chal-
lenging task. A natural approach to designing such
human-machine systems is to share work with the op-
erator on a communication and cooperation level that
is similar to that between two human operators. This
is especially useful, if the technical system has the
purpose of supporting the human operator as in the
assistant systems mentioned in the previous section.
292
Brüggenwirth S., Strenzke R., Alexander A. and Schulte A. (2010).
A GENERIC COGNITIVE SYSTEM ARCHITECTURE APPLIED TO THE UAV FLIGHT GUIDANCE DOMAIN.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 292-298
DOI: 10.5220/0002718202920298
Copyright
c
SciTePress
As explained in (Schulte et al., 2008), these sys-
tems must support the human operator in maintaining
or even improving the operator’s situation awareness
(SA). A well accepted theory of situation of SA in the
human factors community stems from Endsley (End-
sley and Garland, 2000).
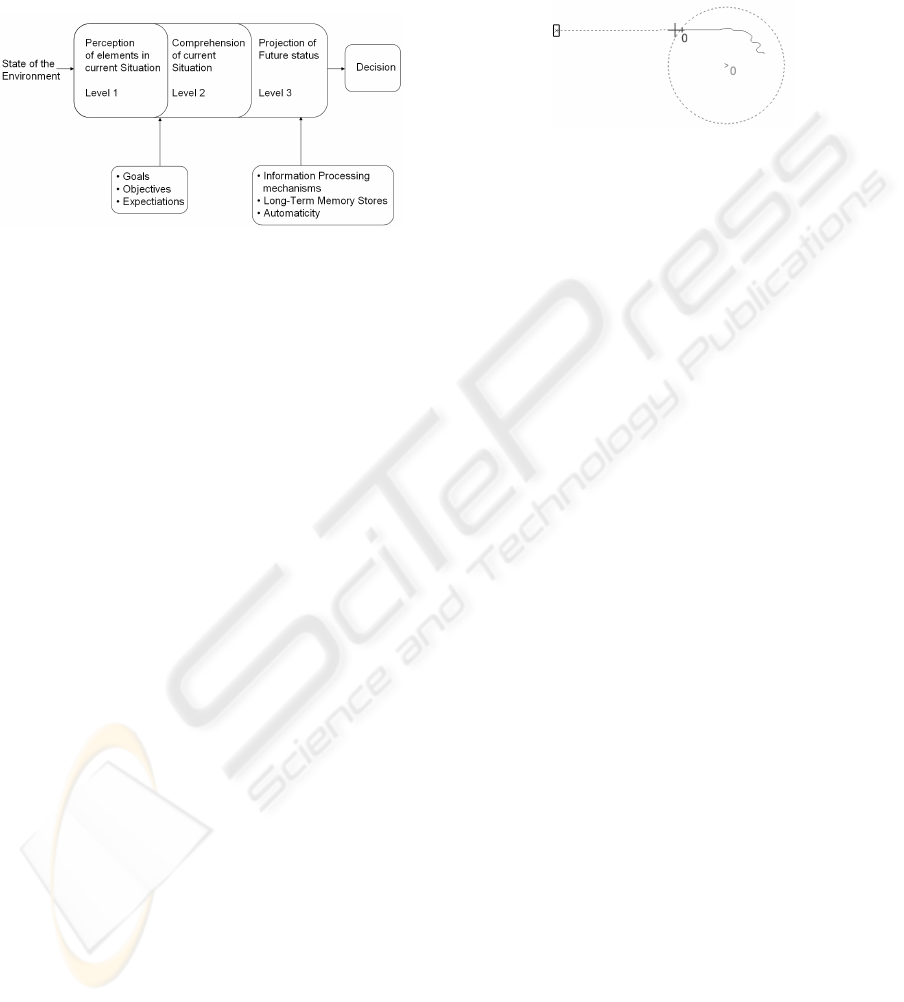
Figure 1: Situation awareness according to Endsley (Ends-
ley and Garland, 2000).
As shown in figure 1, she distinguishes three lev-
els of SA with increasing complexity. While level 1
SA simply represents the elementary building-blocks
of a perceived situation, level 2 SA strives to unify
these elements in order to create a most comprehen-
sible situational understanding. Interestingly, level 3
SA includes both, expected outcomes of own actions
and the anticipated evolution of environment: Knowl-
edge, which will also play a key role in the planning
process. We argue that this human-oriented defini-
tion of situation awareness should be closely linked
to what is commonly known as the belief state of an
agent. Accordingly, an agent that builds up a human-
like high-level SA, e.g. inspired by Endsley’s cate-
gories, has advantages when when interacting with a
human operator. Likewise, information that is used
internally to derive this high-level abstraction should
not be exposed to the operator.
Furthermore the artificial agents must be able to
pursue goals which are either matching directly to the
cognitive goals of the human operator or are subgoals
that the operator has assigned to them. We summa-
rize these concepts as cognitive automation (Onken
and Schulte, 2009). Cognitive automation enables
technical systems to have a human-oriented situation
representation, situation awareness and an explicit
representation of goals. We belief that, although in
some cases computationally less efficient, cognitive
automation simplifies human-machine interaction as
well as the knowledge engineering and system devel-
opment processes.
Although our first, Soar-based (Laird et al., 1987)
implementation of the multi-UAV system has a rela-
tively simple means-ends plan-library that is statically
defined at developmenttime, the knowledgebased ap-
proach already shows emergent behavior not prede-
fined by the developer. This behavior is not generated
by directed reasoning or global optimization, instead
it can be seen as a compromise of multiple actions
related to multiple goals that arise sequentially.
Figure 2: Emergent behavior due the explicit goals: avoid
threat and return to base (Meitinger and Schulte, 2009).
An example is the generation of a flight trajectory
shown in figure 2. In the depicted situation, two goals
are relevant - one is the shortest possible flight path to
the home base and the other is not to come too close
to any SAM (Surface to Air Missile) site. The lat-
ter goal is (reactively) triggered as soon as a minimal
distance is under-run and then replaces the first goal
as the actively pursued one (Meitinger and Schulte,
2009). Even though the resulting flight path resem-
bles the optimal curved trajectory, the emergent be-
havior described above is the result of a greedy algo-
rithm, which follows a locally optimal heuristic (al-
ternating between the shortest flight path and SAM
site avoidance goal). Currently, no projection of fu-
ture environment states is made and therefore loops
in the behavior of the agent may occur.
2 THE COGNITIVE PROCESS
According to the principle of cognitive automation
described in section 1, we have derived an infor-
mation processing scheme, which we call the cog-
nitive process. It is structured in close analogy to
Rasmussen’s model of human information processing
(Rasmussen, 1983), often cited among cognitive psy-
chologists and within the human factors engineering
community.
In figure 3, we present an interpreted version of
the traditional Rasmussen model, tailored for applica-
tion in intelligent agent environments. Our model is
comprised of a low-level, subsymbolic feedback con-
trol layer (skill based), a symbolic, reactive layer with
prestored procedures (procedure-based) and a delib-
erative, goal-oriented layer (concept-based) compara-
ble to a BDI-agent design. From an agent-theoretical
point of view, the approach resembles a hybrid agent
architecture with horizontal layering, comparable to
Fergusons TouringMachines (Ferguson, 1992). Per-
A GENERIC COGNITIVE SYSTEM ARCHITECTURE APPLIED TO THE UAV FLIGHT GUIDANCE DOMAIN
293
ceived data (feature formation, often called the see-
function) is available to the procedure based and con-
cept based layer, but the control policy is currently
straightforward: An exact match to a reactive rule al-
ways takes priority over the deliberative layer. We
currently do not partition our model in hierarchical
layers, e.g. competency-based or multi-agent-wise.
Communication mechanisms between agents have to
be explicitly encoded.
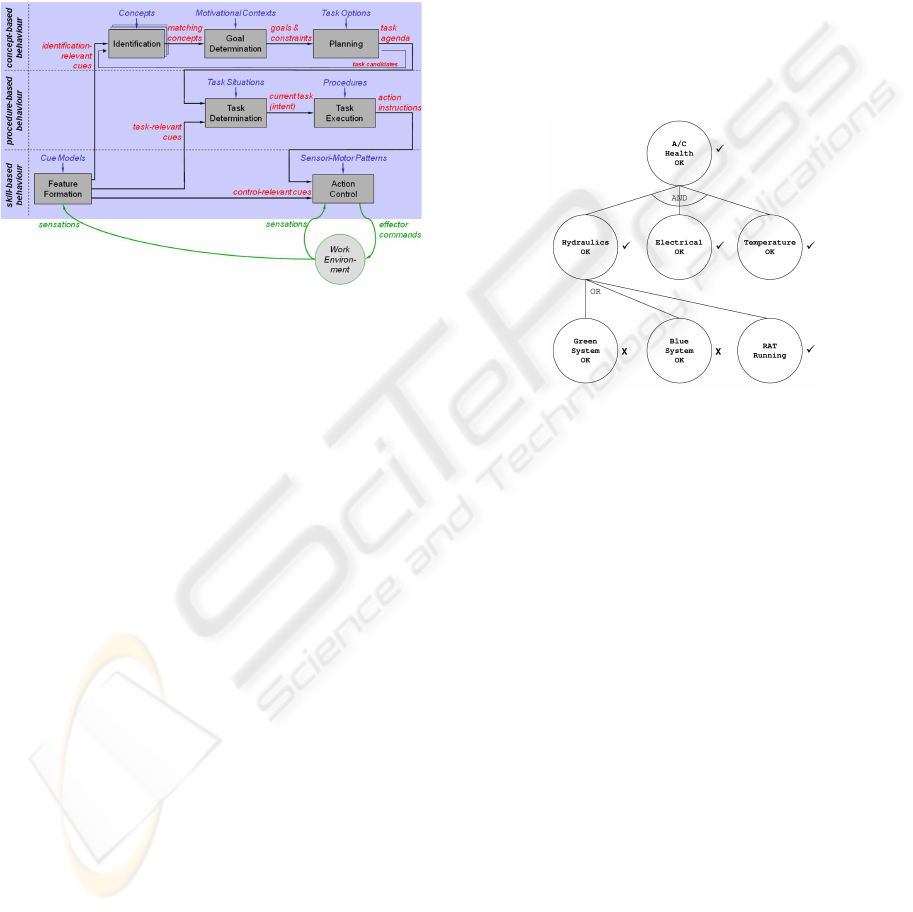
Figure 3: Interpretation of Rasmussen’s model of human
performance incorporating an information technology ap-
proach (Onken and Schulte, 2009).
The cognitive process separates static, a-priori
knowledge in the form of production rules (i.e. the
design-time knowledge: concepts, motivational con-
texts or procedures) from instantiated and parameter-
ized situational knowledge (i.e. the run-time data:
matching concepts, goals & constraints or action in-
structions). In practice, the cognitive subfunctions
(e.g. identification, planning, etc.) may use all the
knowledge that is available to the system. The con-
ceptional processing of information, however, is se-
quential, that is, the output of one subfunction serves
as the input to the subsequent one.
2.1 Identification
The first processing step for concept-based behav-
ior matches identification relevant cues with known
concepts. This inference step is done using Soar
style production system syntax with extensions for
an object-oriented representation of the scene, such
as class encapsulation, inheritance and type-safety as
shown in figure 5. After the forward chaining pro-
cess has come to quiescence, all identification rele-
vant cues have been translated into matching high-
level concepts.
2.2 Goal Determination
Matching concepts represent the high-level abstrac-
tion that is meant to resemble human-like situation
awareness. It also serves as input data to the goal de-
termination module and may hence trigger the activa-
tion of certain goals or a subgoal hierarchy as shown
in figure 4. A goal is met if the associated instance
of a matched concept satisfies certain constraints, e.g.
usually an environment attribute lies within a certain
numerical interval. The agent typically strives to ful-
fill all currently active goals - In case it detects a failed
goal, it will activate its planning module to establish
the unmet conditions of the goal.
Figure 4: And-Or tree representing a goal-hierarchy exam-
ple used for aircraft health monitoring
2.3 Planning
The planning module has the purpose of generating a
sequence of tasks to bring the system from the current
situation into a desired state - in our case to fulfill all
its currently active goals. Similar to Strips (Fikes and
Nilsson, 1971) planners we associate preconditions
and expected effects (postconditions) with each pos-
sible action. To enable backward chaining, we also
require that every production involved in the planning
process is function free. We furthermore adhere to
a framing axiom, that is, facts which are not explic-
itly mentioned as postconditions remain unchanged.
Unlike a classical planner however, we do not add or
remove literals which are checked for a goal state di-
rectly, but project the expected identification relevant
cue of every feasible task candidate (as shown in fig-
ure 3). This introduces additional inference steps to
identify matching concepts before the update and test-
ing of the goal-hierarchy is performed, but has the ad-
vantage of reusing the knowledge for situation com-
prehension (concepts) and motivational contexts. The
planning process announces failure, if it does not en-
counter a state that satisfies all active goals within a
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
294

class
<belief> danger
// class ’danger’ is added to namespace ’belief’
{
attributes:
link aircraft;
// link to an object of class ’aircraft’
string threat;
behavior:
sp
{
create // Soar-like production
(instance[belief::aircraft::*] <own> ˆownAC true)
// IF WM contains an ’aircraft’ object that has attribute ’ownAC’ set to ’true’
(instance[belief::aircraft::*] <other> ˆotherAC true)
// and an aircraft object that has attribute ’otherAC’ with value ’true’
(instance[belief::distance::*] <dist> ˆbetween <ownAC>
// and an object of class ’distance’ the two aircraft as ’between’ parameters
ˆbetween <otherAC> ˆdistance small)
// and its ’distance’ attribute with value ’small’
-->
(elaborate <i> ˆaircraft <otherAC> ˆthreat high)
// THEN create object of this class (’danger’) ref. to other A/C, set ’threat’:=’high’
}
}
Figure 5: Code-Example used in the cognitive process.
certain timespan. Currently, we use a PDDL 2.2 plan-
ner to encode inferred facts as actions and derived
predicates. The re-implemented system may offer the
option to perform planning by direct manipulation of
the working memory graph
2.4 Monitoring
The outcome of a successful planning process is a
task agenda. The items on the agenda are tuples,
composed of tasks and associated task-relevant cues
which trigger the execution of the task. A task-
relevant cue might trivially be a simple time tag or
any other indicator which initiates the task, depend-
ing on the ontology. For execution monitoring pur-
poses, the agenda also contains the anticipated world-
state generated from the pre- and postconditions of a
task during the planning phase. This usually happens
whenever the next task is toggled or at intermediate
discretization points defined at design time. Should
the system detect a deviation from the task agenda,
it triggers a re-planning processes from the current
world state. Alternatively it may ask the operator for
instructions to alter the system knowledge, e.g. if a
hardware failure renders a task option infeasible.
2.5 Procedure-based Behavior
We follow the general convention that an exact
match of a procedure-based behavior rule immedi-
ately fires its associated reactive task, while suspend-
ing concept-based behavior during execution. Once
the procedure-based task has completed, the moni-
toring function will recognize a deviation from the
agenda and initiate re-planning from the current world
state.
Experiments and surveys among pilots and UAV-
operator personnel showed that it is this procedu-
ral knowledge, extracted directly out of manuals,
regulations, combat operation procedures or gained
from experience, that frees pilots from spending cog-
nitive resources on routine tasks and enables them
to direct their attention on high-level mission goals.
Procedure-based behavior therefore poses an impor-
tant feature for knowledge extraction and engineering
in the UAV guidance domain.
Exact matching of procedure-based rules however
implies a closed and consistent world, and is hence
prone to reproducing typical problems encountered in
conventional automation, such as literalism or brittle-
ness (Billings, 1997). We therefore envision as future
work a concept-based, high-level supervision mecha-
nism, which concurrently projects the expected out-
come of the procedure-based behavior and may ex-
plicitly interrupt it, in case it interferes with certain
high-level goals. Ideally, procedure-based behavior
can increase performance, since only the effects of the
associated task need to be projected against the goals,
instead of going through the complete planning phase.
3 IMPLEMENTATIONS OF THE
COGNITIVE PROCESS
Both our implementations of the cognitive process
use a production system that holds in its working
memory the current situation representation including
the system’s beliefs, desires and intents and contains a
knowledge base consisting of two types of production
rules that are applied to the working memory to infer
new facts or make decisions based on existing facts.
The two rule types are (i) inference rules that cause
A GENERIC COGNITIVE SYSTEM ARCHITECTURE APPLIED TO THE UAV FLIGHT GUIDANCE DOMAIN
295
a reversible modification which is retracted, once the
rule’s left hand side does not match anymore and (ii)
operator rules that cause persistent modifications of
the state. The application of the production rules is
directed by a simple automaton as depicted in figure
6 that operates on the working memory.
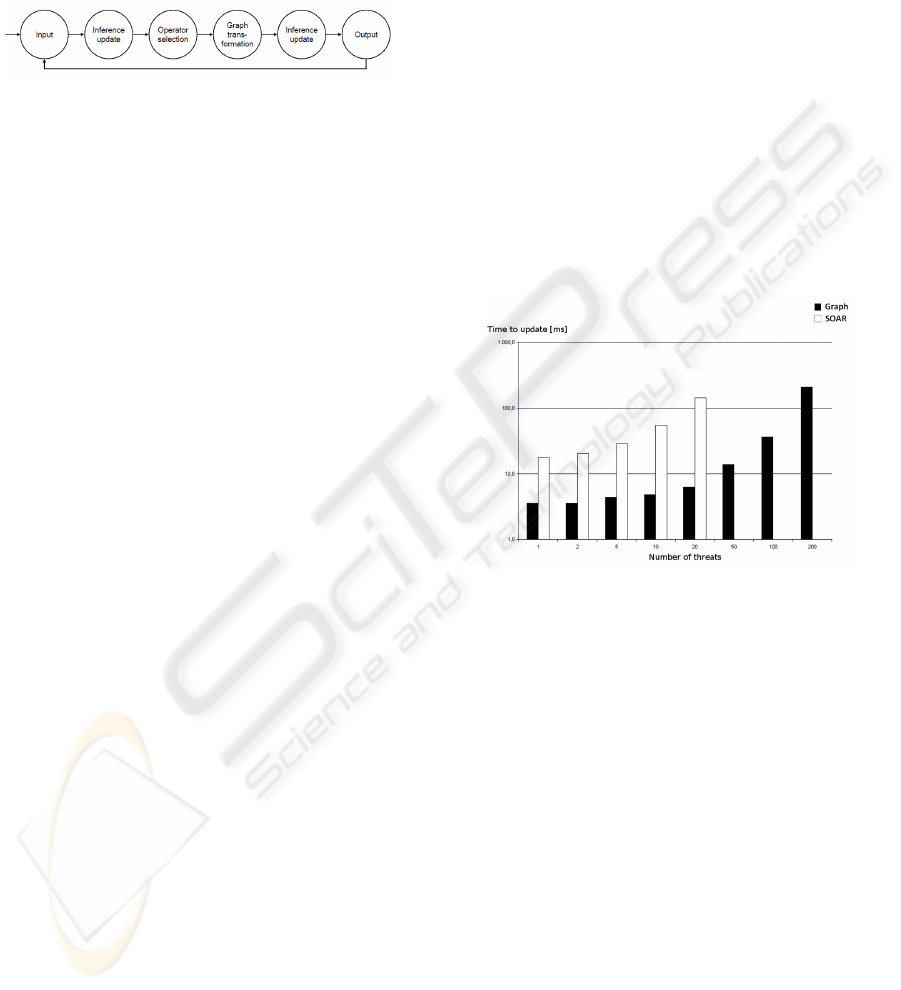
Figure 6: Decision cycle controlling the Cognitive Process.
After reading the input the automaton updates the
inference rules by firing the newly applicable ones
and retracting the invalidated ones. In this phase all
firings occur in parallel until no inference rule is ap-
plicable. This state is referred to as quiescence. In-
ference rules can propose the creation operator nodes
that enable graph transformation rules by generating
operator proposal nodes in working memory. Dur-
ing operator selection the automaton selects one of
the operator proposal nodes and creates an operator
node from it. This operator node serves as a precon-
dition for the operator rules that are then applied. In
the next step the inference rules are again updated to
incorporatethe modifications of the operator rules and
the operator node created during operator selection is
deleted. Finally the automaton generates the output
and starts over again.
This way the automaton provides the flow control
required by the cognitive process that (i) separates the
parallel execution of the inference rules from the se-
quential execution of the operator rules and (ii) allows
priority based decisions on the order of the applica-
tion sequence of the latter (Laird et al., 1987).
The described model of the cognitive process was
initially implemented in our framework COSA. It
used the well established production system Soar as
knowledge processor but extends the functionality
and the Soar syntax to enable the object oriented ele-
ments of our programming language. The framework
has been extensively used in various applications in
the field of multiple co-operating semi-autonomous
aerial vehicles (Schulte et al., 2008; Uhrmann et al.,
2009). Respective prototypeshave been demonstrated
in a collaborative simulation environment with great
success, but with respect to forthcoming field exper-
iments including the use on embedded platforms and
increasing complexity of the encoded knowledge the
observed run-time performance of the existing system
is not sufficient.
Our experimental results showed that the pattern
matching phase within the graph transformation is the
bottleneck in the Soar-based implementation of the
cognitive process – more than 90% of the run-time is
spent in this phase (Matzner et al., 2008). Therefore
an efficient graph pattern matching for the left hand
side of the rule is the key to performance of such an
implementation. To achieve this, we re-implemented
the system by transforming the situation representa-
tion from untyped facts in the Soar-based implemen-
tation into directed, typed multigraphs. We also de-
veloped an incremental pattern matching algorithm
that on the one hand incorporates techniques from
the field of graph transformations to increase perfor-
mance and on the other hand extends the expressive-
ness our modeling language by directly supporting in-
heritance. As the performance of a pattern matching
algorithm very much depends on the quality of the
search plan which again depends on the situation spe-
cific cardinality of objects in the host graph we further
augmented our algorithm with an evolutionary search
plan optimizer.
Figure 7: Re-implemented system shows significant in-
crease in performance.
Examination of the re-implemented system in a
benchmark multi-UAV application in which an in-
creasing amount of rules were imposed on the sys-
tem, showed a significant decrease of overall mem-
ory consumption which enabled the system to han-
dle scenarios with over 200 instantiated SAM site
(threat) objects, whereas the existing system reached
the memory limits at 50 objects. Also, the time used
to complete the pattern matching in each cycle was
decreased by around an order of magnitude (see fig-
ure 7).
4 APPLICATION FOR
MANNED-UNMANNED
TEAMING
The manned-unmanned teaming scenario regards a
manned transport helicopter with a crew consisting
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
296

of a pilot flying and a commander, who is respon-
sible for the helicopter and may delegate tasks to a
self-organizing pool of UAVs. Figure 8 shows the
helicopter cockpit plus multi-UAV simulator in use.
The transport helicopter has the mission goal to de-
liver troops to a specified object which is reachable
via a predefined route. The way home is also pre-
defined. Both routes include a corridor which may
only be used during specific time intervals. For the
protection of the transport helicopter there is an addi-
tional attack helicopter, that flies in front of the trans-
port helicopter and may also leave the route in or-
der to provide protection. This is necessary because
there are previously unknown vehicles distributed in
the mission area, which are either posing a threat or
not. To enable the helicopter commanders to assess
the situation, these vehicles have to be photographed
by the UAVs early enough before any manned heli-
copter passes the corresponding area. So both he-
licopter crews are in need of the capabilities of the
UAV pool. The intelligent agent software on-board
the UAVs has to cope with payload management (i.e.
set camera angles, take picture) and flight manage-
ment (i.e. trajectory planning) at the same time to
create the photos the commanders need in order to
identify the vehicles. Furthermore, the tasks given to
the UAV pool have to be sorted temporally and dis-
tributed among its participants, which leads to the ne-
cessity of a mission management capability. This ca-
pability also enables the UAVs to receive, distribute
and execute tasks that originate from various sources
in addition to the two manned helicopters mentioned
above. From the view point of the human operators
the UAVs represent capabilities (like reconnaissance)
which is the reason why we speak of capability man-
agement instead of vehicle management or the like.
Figure 8: Helicopter plus multi-UAV simulator with the
commander viewing UAV sensor data (Uhrmann et al.,
2009).
4.1 Planning and Resource Problems
As our work is evolving towards a non-deterministic,
real-world application (which will culminate in the
deployment of our physical UAVs, see figure 9), we
have to deal with much more complex, open envi-
ronments. Another recent trend is the focus on the
manned-unmanned teaming application, leading to a
more seamless integration of manned aircraft and/or
human operators into the missions. In military mis-
sions which include manned components, predefined
time schedules have to be kept to reduce risk of life.
This can only be ensured, if the artificial agents them-
selves have a concept of time and are able to generate
plans that consider certain temporal constraints. In
addition, the human operator in such a dangerous en-
vironment expects the artificial agents to act on a high
optimization level.
Figure 9: Unmanned helicopter (left) / plane (right) as
MUM-T testbed.
In the scenario described above, time is the most
critical resource, but one may easily think of other
bounded resources that could play a role if realism is
raised, e.g. fuel or payload.
In the example presented in figure 10 two heli-
copters are on their way to the operation area. There
are two UAVs to support them flying in front, tasked
to reconnoiter the route, then move towards the oper-
ation area and eventually build a communications re-
lay (necessary as soon as the transport helicopter has
landed). Only one UAV is needed to work as relay,
but the reconnaissance task can be covered by mul-
tiple UAVs to either achieve higher quality results or
faster accomplishment. Therefore a suitable plan for
the UAVs is to cooperate concerning the reconnais-
sance tasks until one UAV takes over the role as relay,
while the other one is free to work on tasks that are
out of the scope of this example.
We now consider the unforeseen event that a ve-
hicle is discovered along the route and the comman-
der of the attack helicopter generates additional tasks
for the UAV pool: identify the vehicle, then mark it
(see figure 10). This leads to a re-planning process,
that should answer the questions, which UAV can take
over the new tasks and will there still be any UAV that
A GENERIC COGNITIVE SYSTEM ARCHITECTURE APPLIED TO THE UAV FLIGHT GUIDANCE DOMAIN
297

Figure 10: Manned-unmanned teaming use case.
is able to work as communications relay in the given
time frame. In case the temporal constraints cannot
be satisfied, it may be an option to re-plan the whole
mission, e.g. slow down the manned helicopters so
that the constraints become loosened.
4.2 Future Work
To solve such a problem without too much human in-
teraction, the intelligent agent needs to predict the dy-
namic development of the situation. Furthermore, the
agent needs to keep track of time constraints, consum-
able and renewable resources. As already mentioned,
this will require more elaborate planning algorithms,
potentially operating directly on the working memory
graph. Interesting improvements could come from
features of recent AI planners, e.g. strong and soft
constraints and preferences, that were introducedwith
PDDL3 (Gerevini and Long, 2005).
As furthermore mentioned in section 2.5, another
current research activity focuses on the control policy
between reactive and deliberative layer. Finding this
right balance of flexibility is a major question in the
agent community - other hybrid agent architectures
have already introduced sophisticated (but sometimes
for our purposes too complex) concepts.
REFERENCES
Billings, C. E. (1997). Aviation Automation - the Search
for a Human-Centered Approach. Lawrence Erlbaum
Associates, Mahwah, NJ.
Endsley, M. R. and Garland, D. J. (2000). Situation Aware-
ness Analysis and Measurement. Lawrence Erlbaum
Associates, Mahwah, NJ.
Ferguson, I. A. (1992). TouringMachines: An Architecture
for Dynamic, Rational, Mobile Agents. PhD thesis,
University of Cambridge. Clare Hall.
Fikes, R. and Nilsson, N. (1971). Strips: A new approach
to the application of theorem proving to problem solv-
ing. In Artificial Intelligence, volume 2, pages 198–
208, Heidelberg, Germany. Springer.
Freed, M., Bonasso, P., Ingham, M., Kortenkamp, D., Pell,
B., and Penix, J. (2005). Trusted autonomy for space-
flight systems. In AIAA First Space Exploration Con-
ference, Orlando, FL.
Gerevini, A. and Long, D. (2005). Plan constraints and pref-
erences in PDDL3. Technical report, Dipartimento di
Elettronica per l’Automazione, Universita degli Studi
di Brescia.
Laird, J. E., Newell, A., and Rosenbloom, P. S. (1987).
SOAR: An architecture for general intelligence. In
Artificial Intelligence, volume 33, pages 1–64, Hei-
delberg, Germany. Springer.
Matzner, A., Minas, M., and Schulte, A. (2008). Efficient
graph matching with application to cognitive automa-
tion. In Applications of Graph Transformations with
Industrial Relevance, pages 297–312, Berlin, Ger-
many. Springer.
Meitinger, C. and Schulte, A. (2009). Human-uav co-
operation based on artificial cognition. In Engineer-
ing Psychology and Cognitive Ergonomics, pages 91–
100, Heidelberg, Germany. Springer.
Onken, R. and Schulte, A. (2009). System-ergonomic
Design of Cognitive Automation in Work Systems.
Springer, Heidelberg, Germany.
Rasmussen, J. (1983). Skills, rules and knowledge, signals,
signs and symbols, and other distinctions in human
performance models. In IEEE Transactions on Sys-
tems, Man, and Cybernetics, volume SMC-13, pages
257–266, Heidelberg, Germany. Springer.
Rauschert, A., Meitinger, C., and Schulte, A. (2008). Ex-
perimentally discovered operator assistance needs in
the guidance of cognitive and cooperative uavs. In
Proceedings of HUMOUS conference, Brest, France.
Springer.
Schulte, A., Meitinger, C., and Onken, R. (2008). Human
factors in the guidance of uninhabited vehicles: Oxy-
moron or tautology? the potential of cognitive and
co-operative automation. In International Journal on
Cognition Technology & Work, Heidelberg, Germany.
Springer.
Uhrmann, J., Strenzke, R., Rauschert, A., C.Meitinger, and
Schulte, A. (2009). Manned-unmanned-teaming: Ar-
tificial cognition applied to multiple uav guidance. In
NATO RTO SCI Symposium on Intelligent Uninhab-
ited Vehicle Guidance Systems, Neubiberg, Germany.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
298
