
INTEGRATING POINTING GESTURES INTO A SPANISH–SPOKEN
DIALOG SYSTEM FOR CONVERSATIONAL SERVICE ROBOTS
H´ector Avil´es, Iv´an Meza, Wendy Aguilar and Luis Pineda
Department of Computer Science, Instituto de Investigaciones en Matem´aticas Aplicadas y en Sistemas
Universidad Nacional Aut´onoma de M´exico, Circuito Escolar, Ciudad Universitaria, D.F. 04510 M´exico
Keywords:
Conversational service robots, Dialog systems, Pointing gesture recognition, Multimodal interaction.
Abstract:
In this paper we present our work on the integration of human pointing gestures into a spoken dialog system in
Spanish for conversational service robots. The dialog system is composed by a dialog manager, an interpreter
that guides the spoken dialog and robot actions, in terms of user intentions and relevant environment stimuli
associated to the current conversational situation. We demonstrate our approach by developing a tour–guide
robot that is able to move around its environment, visually recognize informational posters, and explain sec-
tions of the poster selected by the user via pointing gestures. This robot also incorporates simple methods
to qualify confidence in its visual outcomes, to inform about its internal state, and to start error–prevention
dialogs whenever necessary. Our results show the reliability of the overall approach to model complex multi-
modal human–robot interactions.
1 INTRODUCTION
We present the integration of pointing gestures into a
Spanish–spoken dialog system for conversational ser-
vice robots. The main component of the dialog sys-
tem is the dialog manager that interprets task–oriented
dialog models which define the flow of the conversa-
tion and the robot actions. The dialog manager, an
agent itself, also coordinates other distributed agents
that perform speech, navigation and visual capabili-
ties for the robot in terms of user intentions and per-
ceptual stimuli relevant to the current conversational
situation (Aguilar and Pineda, 2009).
To demonstrate our approach, we developed a
tour–guide robot that asks for one of six informational
posters using spoken language, navigates to the poster
to recognize it and identifies its sections. The robot is
able to explain sections selected by the user via 2D
pointing gestures. We also explore error prevention
and recovery dialogs for the visual system, by incor-
porating a simple method to qualify confidence of the
robot in its visual outcomes, to begin confirmation di-
alogs whenever necessary.
2 RELATED WORK
Robita (Tojo et al., 2000) is a robot that is able to rec-
ognize questions about the location of a person in an
office environment, to answer verbally sentences, to
point places with its arm, and also recognize pointing
gestures of the user. ALBERT (Rogalla et al., 2002) is
a robot capable to grasp objects following speech and
pointing gestures. Jido (Burger et al., 2008) tracks
head and hands of a user, and answers requests such
as “Come here”. Markovito (Aviles et al., 2009) rec-
ognizes spoken commands and identifies 9 gestures
of the type “come” or “attention”. In these examples,
dialog modules are subordinated to the requirements
of a main coordinator module. In this form, they can-
not be considered conversational service robots. Only
few robots present dialog systems as the core element
of their coordination modules. BIRON (Toptsis et al.,
2005) is a robot that uses pointing gestures and visual
information of the environment to resolve spoken ob-
ject references. The dialog module is a finite state
machines. Similarly, the Karlsruhe robot (Stiefelha-
gen et al., 2006) includes a dialog manager based on
reinforcement learning.
585
Avilés H., Meza I., Aguilar W. and Pineda L. (2010).
INTEGRATING POINTING GESTURES INTO A SPANISH–SPOKEN DIALOG SYSTEM FOR CONVERSATIONAL SERVICE ROBOTS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 585-588
DOI: 10.5220/0002722605850588
Copyright
c
SciTePress
agent
Speech Understanding
Navigation agentVision agent
Dialog Manager
Dialog system architecture
SinthetizerSound signal
Robot
motors
High level coordinator
Image
sequence
Perceptual and behavioural
agents
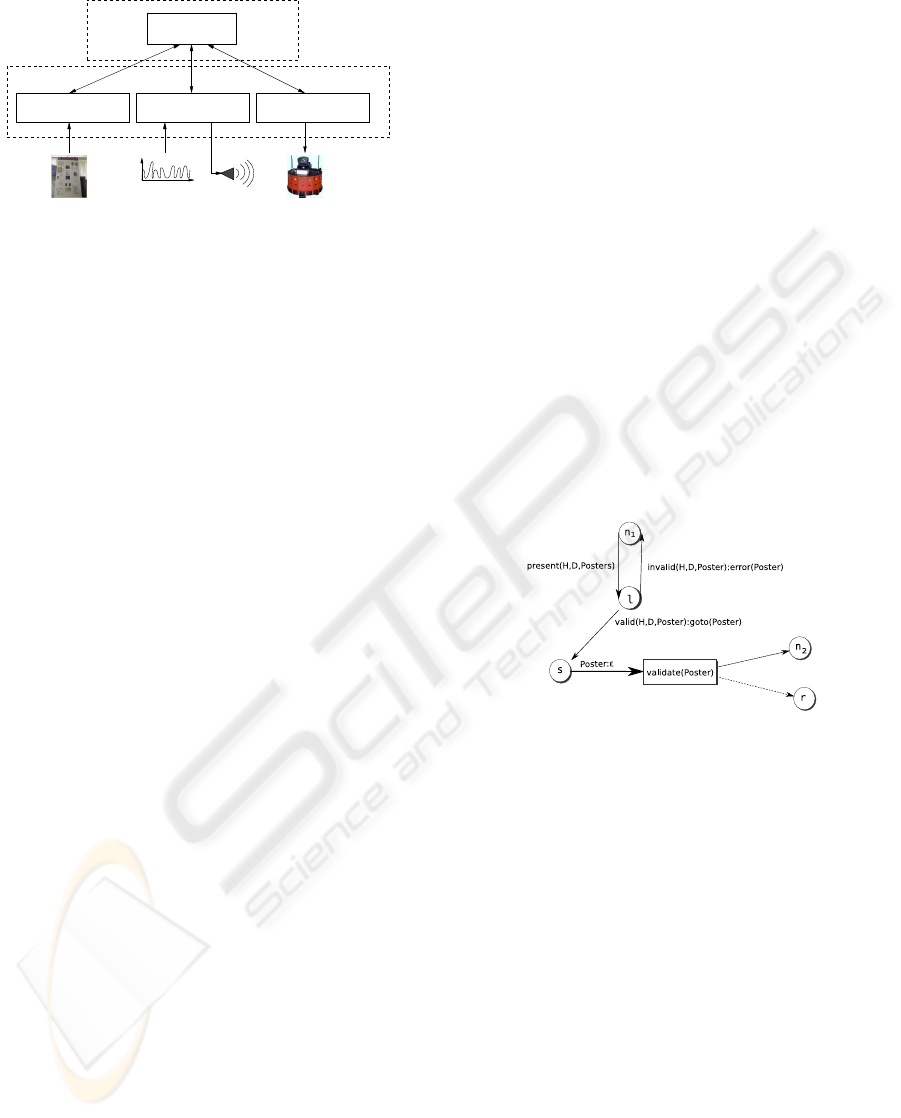
Figure 1: Architecture of the dialog system.
3 DIALOG SYSTEM
The architecture of our dialog system is depicted in
Figure 1. This is a 2–layer architecture composed
by four independent agents: i) the dialog manager,
ii) the Vision agent, iii) the Speech Understanding
agent, and iv) the Navigation agent. The dialog man-
ager, as the high level coordinator, executes instruc-
tions pre–defined in a dialog model designed for the
task at hand.
3.1 Dialog Manager
The dialog manager is an interpreter based on recur-
sive networks that tracks the context of the conversa-
tion, manages the set of perceptual information for a
given stage of the interaction, and also produces ad-
equate responses for the current conversational situ-
ation. It is also responsible of mediating the agent
level communication between perceptual and behav-
ioral agents. The dialog manager performs all these
functions by executing task–oriented dialog models.
Dialog models specify interaction protocols of the
robot with the user and environment. The core ele-
ments of a dialog model are: i) situations that repre-
sent a relevant state in interaction for which a particu-
lar perceptual strategy has to be applied –e.g., listen-
ing to the answer of a question posted by the robot.
ii) expected intentions, or the set of perceptual stimuli
relevant for a given situation iii) multimodal rhetor-
ical structures or MRS, that represent a set of basic
rhetorical acts –or behaviours– to be performed by the
system –e.g., speech synthesis or robot motion. These
three elements allow us to codify a rich set of be-
havioural capabilities and perceptual stimuli that our
robot is able to understand.
Figure 2 graphically describes one fragment of the
dialog model developed for our robot. The nodes rep-
resent the situations, the labels on the arcs represent
the pair of expected intention and MRS structure, and
the arrows point to the destination situation. The di-
alog model starts with the situation (n
1
) in which the
system presents the posters. In this case, the rhetor-
ical act to perform depends on the history of the di-
alogue. We achieve this with the evaluation function
represented by: get(H, D, Posters) where the returned
value of this function is a MRS structure enumerating
the poster which have not been visited. The next sit-
uation is a listening situation (l) in which the poster
to visit is interpreted from the user speech. At this
situtation, there are two options: the poster is valid or
invalid. When an invalid poster is chosen the robot
will mention this and return to the situation n
1
. In
case the chosen option is valid the robot moves to the
poster location (goto(Poster)). In this case, it reaches
the situation seeing (s) where it will look at the poster
and identify it. The next situation will be defined by a
functional evaluation of the seen poster being the right
one or not validate(H, D, Poster). Depending on the
result the dialogue will reach the situation n
2
in which
it will explain the poster or the recursive situation r in
which it goes into a sub–dialog to figure out what it
went wrong with the poster.
Figure 2: Example of one segment of our dialog model.
4 PERCEPTUAL AND
BEHAVIOURAL AGENTS
4.1 Speech Understanding Agent
The Speech Understanding agent performs speech
recognition and synthesis in Spanish (Pineda et al.,
2004), and speech interpretation, that is performed by
comparing the sentence with a set of linguistic pat-
terns of each expected intention.
4.2 Navigation Agent
Robot navigation is performed on a 2D world. The
dialog manager informs to the agent the world (x, y)
position of the poster plus θ, the final angular orienta-
tion. First, the robot rotates accordingly to the actual
orientation and final (x, y) location, and moves along
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
586

a straight line up to this coordinate. We assume there
are not obstacles along the path of the robot. Once the
robot has arrived, it rotates again up to reach the final
θ orientation.
4.3 Vision Agent
Poster recognition is performed using SIFT algo-
rithm. For recognition, features are obtained from the
current view and matched against each SIFT poster
template. The number of matches of each poster is
stored in a frequency table R which is used to qual-
ify visual outcomes as described in section 5.1. The
poster with a maximum number of matches and above
a threshold –defined experimentally– correspond to
the classification result. If this criterion is not met,
the visual agent let the dialog manager know this sit-
uation, and a simple recovery dialog proceeds.
To carry out region segmentation, the vision agent
receives (i, j) original coordinates of the rectangle
that delimits each section of the poster. To adjust co-
ordinates to the actual view, we calculate a perspec-
tive transformation matrix based on SIFT matches us-
ing RANSAC. Once all visible sections have been cal-
culated, a rectangular window of interest is defined to
fit all of them. Figure 3a and 3b shows the original
view of the poster, and its relevant regions and poster
window, respectively. From now on, visual analysis
will be confined to this window and referred simply
as the poster.
(a) (b)
Figure 3: Examples of region segmentation: a) original im-
age, b) segmentation of each relevant region of the poster.
Region boundaries are delimited by green rectangles. The
red rectangle defines the poster window.
For pointing gestures, the arm is spotted into a bi-
nary image F by fusioning motion data –image M–
the difference between edges using Laplacian edge
detectors –image E– of the current poster view and
the first image of the poster taken in the actual robot’s
position, and the absolute difference of the current
poster image and its initial view –image D. These
3 images are thresholded to get binary images. Data
fusion is performed following the logic AND rule:
F(i, j) = M(i, j) ∧ E(i, j) ∧ D(i, j), ∀i, j, (1)
Figure 4 the original monocular image and the re-
sulting fusion image F.
(a) (b)
Figure 4: Results of the fusion of simple visual clues for
arm detection: a) original image with the poster window
drawn in black color, and b) fusion results.
Arm segmentation is executed by scanning F
row–by–row, from left–to–right, and from top–to–
bottom, to detect foreground–background pixels.
Simple decisions are used to grow and identify the
foreground region of the arm. A line is fitted to all
its pixels using least–squares method. The tip of the
arm is selected by comparing the distance from both
extreme points of the line to the vertical edges of the
poster. Figure 5 shows the visual outcome of this pro-
cedure. One vector P is used to record the number
of image frames that the tip is over each region. Each
bin of P correspondto a single region. The first region
to accumulate 30 images, is considered to be the user
choice. Arm segmentation is performed for a maxi-
mum of 10 seconds. In case a section is not identified
by the end of this period of time, the dialog manager is
informed so it could start a sub–dialog with the user.
(a)
Figure 5: Result of the arm segmentation, line fitting and
tip selection.
5 PUTTING IT ALL TOGETHER
5.1 Evaluation of Visual Outcomes
To evaluate poster recognition results, we use table R
described above. We averaged and plotted tables R
obtained from more than 300 classification trials. It
was observed regular patterns for correct and incor-
rect classification outcomes. We propose to model
these patterns using Shannon’s entropy measure H.
INTEGRATING POINTING GESTURES INTO A SPANISH-SPOKEN DIALOG SYSTEM FOR CONVERSATIONAL
SERVICE ROBOTS
587

When a poster is recognized, R is normalized to ob-
tain a discrete probability distribution, and H is cal-
culated for this distribution. We consider three main
categories to evaluate the confidency on poster classi-
fication: high, medium and low assigned accordingly
to threshold values of H defined by experimentation.
To evaluate the selection of a region we use vector
P described in Section 4.3. If the bin with the maxi-
mum number of image frames is above 15 and below
30, then the robot warns the user that it is not com-
pletely sure about the selection. If the bin with the
maximum is below 15, the robot tells the user that the
identification of a section was not possible, and asks
for another attempt.
5.2 Results
We have tested our approach with 5 different people
in several demonstrations in our Lab. All these people
are either students or Professors of our Department.
In all cases, the robot was able to correctly identify the
desired poster, or to ask the user in case of doubt. Al-
most all people were able to select the desired section
of the poster within a single trial, and they seemed
to be satisfied with the corresponding explanations.
However, we also observed that not all people points
to the poster immediately after the alert sound is emit-
ted by the robot, mainly because they had not yet de-
cided which section to select. For this case, evalua-
tion of the pointing output has proved to be an useful
tool to add flexibility to our system. From initial us-
ability tests performed with these users, we found that
evaluating confidence of the visual analysis improves
considerably the perceived naturalness of the spoken
language of the robot.
6 CONCLUSIONS
In this paper we presented our work on the integration
of pointing gestures into a spoken dialog system in
Spanish for a conversational service robot. The dialog
system is composed by a dialog manager, that inter-
prets a dialog model which defines the spoken dialog
and robot actions, accordingly to the user intentions
and its environment. We developeda tour–guide robot
that navigates in its environment, visually identify in-
formational posters, and explain sections of the poster
pointed by the user with its arm. The robot is able to
qualify its confidence in its visual outcomes and to
start error–prevention dialogs with the user. Our re-
sults showed the effectiveness of the overall approach
and the suitability of our dialog system to model com-
plex multimodal human–robot interactions.
REFERENCES
Aguilar, W. and Pineda, L. (2009). Integrationg Graph–
Based Vision Perception to Spoken Conversation
in Human–Robot interaction. In 10th Interna-
tional Work–Conference on Artificial Neural Net-
works, pages 789–796.
Aviles, H., Sucar, E., Vargas, B., Sanchez, J., and Corona,
E. (2009). Markovito: A Flexible and General Service
Robot, chapter 19, pages 401–423. Studies in Compu-
tational Intelligence. Springer Berlin / Heidelberg.
Burger, B., Lerasle, F., Ferrane, I., and Clodic, A.
(2008). Mutual assistance between speech and vi-
sion for human–robot interaction. In IEEE/RSJ Inter-
national Conference on Intelligent Robotics and Sys-
tems, pages 4011–4016.
Pineda, A., Villase˜nor, L., Cuetara, J., Castellanos, H., and
Lopez, I. (2004). Dimex100: A new phonetic and
speech corpus for Mexican Spanish. In Iberamia-
2004, Lectures Notes in Artificial Intelligence 3315,
pages 974–983.
Rogalla, O., Ehrenmann, O., Zoellner, M., Becher, R., and
Dillmann, R. (2002). Using gesture and speech con-
trol for commanding a robot assistant. In Proceedings
of the 11th IEEE Workshop on Robot and Human in-
teractive Communication, pages 454–459.
Stiefelhagen, R., Ekenel, H., C. Fugen, P. G., Holzapfel, H.,
Kraft, F., Nickel, K., Voit, M., and Waibel, A. (2006).
Enabling multimodal human–robot interaction for the
karlsruhe humanoid robot. In Proceedings of the IEEE
Transactions on Robotics: Special Issue on Human–
Robot Interaction, pages 1–11.
Tojo, T., Matsusaka, Y., and Ishii, T. (2000). A Conversa-
tional Robot Utilizing Facial and Body Expressions.
In International Conference on Systems, Man and Cy-
bernetics, (SMC2000), pages 858–863.
Toptsis, I., Haasch, A., H¨uwel, S., Fritsch, J., and Fink, G.
(2005). Modality integration and dialog management
for a robotic assistant. In European Conference on
Speech Communication and Technology, Lisboa, Por-
tugal.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
588
