
A NEW REPRESENTATION AND PLANNER FOR COMPUTER
BATCH JOB SCHEDULING, EXECUTION MONITORING,
PROBLEM DIAGNOSIS AND CORRECTION
Tracey Lall
Department of Computer Science, Rutgers, The State University of New Jersey, New Brunswick, New Jersey, U.S.A.
Keywords:
Planning, Scheduling, Execution, Diagnosis, Automation.
Abstract:
Modern enterprise computer environments use commercial schedulers to run and monitor computer batch
jobs and processes. Currently the job schedules must be manually designed to include diagnosis and error
correction behaviours for failed jobs or failures must be handled by support staff at execution time, requiring
them to be on call while these jobs run. Automating these manual tasks using planning techniques requires a
compact representation of contingent plans, handling and monitoring of actions which have a variable duration,
actions which are triggered by external events and planning for knowledge goals. Currently these features are
not provided by any existing single planner. We present a novel plan representation which drawing on existing
scheduler representations provides all these features in an integrated manner. A planner implementation using
this representation with a new action logic is described along with key worked examples from the domain.
1 INTRODUCTION
Modern enterprise computer environments involve
the scheduled running of hundreds of computer batch
jobs, programs and processes on a collection of ma-
chines. These consist of computer programs which
are run to achieve a specific task - for example a job to
generate a report and email it to a user. These jobs are
executed at predetermined times and monitored for
successful completion by commercial schedulers ac-
cording to predefined job schedules. Schedules need
to be designed in order to avoid conflicts between
certain jobs (for example running a report against a
database when the database is undergoing a mainte-
nance job) and to ensure that batch job outputs are
produced by the required deadlines. In all cases the
job schedule definitions must be created in advance
by the support team and unless explicit recovery logic
is programmed into the definitions job failures will
require manual intervention to diagnose the cause of
the error and to take appropriate corrective actions.
This makes support of such environments very costly
- typically for every dollar spent on computing infras-
tructure, between 2-10 times that amount are spent for
ongoing management (Murch, 2004).
Previous approaches to the automation of batch
job control (Ennis, 1986), have utilized a pattern
based rule approach to error situation identification.
The disadvantage of this approach is that error han-
dling rules must be hand-coded by a skilled operator
for each computer environment. We seek instead to
create a planner which is able to generate contingent
plans for job execution, monitoring and error correc-
tion based on the known behaviours of the batch jobs
and the processes comprising the computer system.
From analysis of the domain there are some key
aspects which need to be addressed by the planner:
• The representation of contingent plans must be in
a form understandable to support staff and in or-
der to avoid combinatorial explosion in the size of
plans, the representation should be a compact rep-
resentation which supports the remerging of con-
tingent execution branches.
• The representation needs to support actions which
have a variable duration and hence which require
monitoring for completion.
• The representation must allow reasoning about
triggered actions and events - actions and events
which occur as soon as a particular set of condi-
tions becomes true.
• The representation must support planning for
knowledge goals in order to diagnose job failure
root causes which are not directly sensable.
277
Lall T. (2010).
A NEW REPRESENTATION AND PLANNER FOR COMPUTER BATCH JOB SCHEDULING, EXECUTION MONITORING, PROBLEM DIAGNOSIS
AND CORRECTION.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 277-284
DOI: 10.5220/0002723602770284
Copyright
c
SciTePress

These features are not provided by any existing
single planner. We present a novel plan representa-
tion which addresses these requirements by drawing
upon the existing commercial scheduler representa-
tions. The representation describes the plan as a dy-
namical system which in conjunction with the exter-
nal world evolves/runs according to a simple dynam-
ics. We describe an action logic for reasoning about
this dynamical system which provides both forwards
temporal projection inferences and means end based
inferences to support partial order contingent plan-
ning. We outline the operation of an implemented
planner using this logic on two key examples from
the domain to demonstrate how it builds the plan in
such a way that so that the combined plan and world
state evolve into a goal state on all contingencies.
2 COMPUTER BATCH JOB
ENVIRONMENTS
2.1 Commercial Schedulers
Automated schedulers (ComputerAssociates, 2002),
(UC4, 2008) exist which allow job schedules and de-
pendencies to be defined. A job is run once its sched-
uled time (if defined) is reached and its start condi-
tions become true, e.g. the start conditions for a batch
jobC might be:
success(jobA) and not running (jobB)
This job will run as soon as jobA is in success
state (i.e. has completed with a nominal process exit
status) and jobB is not in the running state. Such
schedulers employ an event processor which given a
set of job definitions constantly checks to see if any
jobs are ready for execution.
2.2 Illustrative Example Scenarios
The following example scenarios from a case study
conducted on a real world production computer envi-
ronment demonstrate some of the key features of this
domain:
• A report script generates a report for a given date
by processing an input file. The input file is only
received after it has been generated by an exoge-
nous external event. The report generation takes
a variable amount of time and must be monitored
for completion. Once the report is generated the
report file is ftped to a remote server for use by
an external job. This examples demonstrates the
need for reasoning about exogenous events, trig-
gered events and action execution and monitoring
of durative actions.
• A database error must be repaired, where the er-
ror value can be 1 or 2. To check for internal
database errors a test script checkDb can be run
which takes as an argument the error condition e
it is checking for and outputs True if the database
has that error or False if it doesn’t. There is also
a repairDB script which takes as an argument an
error number e and repairs that error condition (or
does nothing if the database does not have that
condition). Using these scripts, in the event that
a job which accesses the database fails, the error
condition may be determined using the checkDb
script and once the error number is determined the
repairDB script can be called with this error num-
ber to repair the error condition.
This example demonstrates the need for con-
tingent planning, handling of merging of plan
branches and planning for knowledge goals.
2.3 Existing Planner Applicability
There is an enormous range of existing planners with
a broad range of capabilities. Any planner suitable
for this domain must be able to handle the open world
assumption i.e. it must be a contingent planner able
to produce plans whose execution is conditional upon
observations made at execution time. Planners such
as Puccini (Golden, 1998), PKS (Petrick and Bac-
chus, 2002) , GPT (Bonet and Geffner, 2001), MBP
(Bertoli et al., 2001), CC-Golog (Grosskreutz and
Lakemeyer, 2000), C-Buridan (Draper et al., 1994)
are all able to plan in an open world and all except
for Puccini perform contingent reasoning. However
these planners are unable to handle the other require-
ments - Puccini, PKS, MBP, GPT, MBP are all linear
planners - they don’t employ partial order based rea-
soning and hence are unable to reason about actions of
varying durations. All of the planners except GPT use
a branching tree plan representation where each time
an observation is made and an action is predicated on
that observation a branch is introduced into the plan,
with no remerging of the plan branches - which can
lead to combinatorial explosion in plan size. GPT
uses a more compact plan representation as an MDP
policy which is a mapping from planner belief states
to actions.
None of the planners (except CC-Golog which has
a high level while, dowait language construct ) in-
clude action monitoring in the plan representation.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
278

3 NEW PLAN REPRESENTATION
A new plan representation was formulated to meet the
domain requirements. The representation is a ’plan as
program’ type approach(as in (Levesqueet al., 1997))
where the plan is a simple form of program which
is interpreted at runtime into execution of actions ac-
cording to the control structure and sequence defined
by the program.
In order to incorporate the action monitoring as-
pects and to allow actions to be triggered by exter-
nal conditions, the approach taken is to represent the
plan itself using a very similar language as used by
commercial job schedulers - where agent actions are
executed as soon their associated start conditions be-
come true. This representation’s viability as a run-
time execution model which handles triggered events
and durative actions has been demonstrated via its
use in commercial schedulers. Additionally its read-
ability and interpretation by human operators has
been validated. This simple ’programming language’
also obeys a simple formally definable dynamics and
hence can be directly reasoned about using an appro-
priate action logic.
Most partial order planners use a mixed represen-
tation where the plan represents both plan construc-
tion time reasoning (such as causal links, threats, pro-
tections, orderings) and the runtime execution. In
this representation the plan consists purely of its con-
stituent parts described below and planner deliber-
ation is performed seperately using an action logic
which reasons about the dynamics of this plan.
The form for a plan in this representation is
defined below:
< plan >::=< job > | < planVariableValue >
[< plan >]
< job >::= (”name : ” < identifier >
command : ” < command >;
”status : ” < status >;
startConditions : ” < startCondition > ∗)
< status >::= ”Initialised”|”Executing”|”Completed”
< planVariableValue >::=
(”name : ”i < identifier > ”value : ” < value >)
< command >::= [< identifier >,=]
[“] < string > [< parameter > ∗][“]
A command contains a string description of an
internal (planner inbuilt) command or a quoted string
description of an external operating system script and
a list of parameters for the command. A parameter
may be a plan variable or a constant. The return value
from the command may be optionally assigned to a
plan variable.
The command is run as soon as the job status is
Executing. During planner deliberation for each com-
mand there are corresponding event definition(s) used
by the action logic to determine the effects (on both
planner variables and world fluents) of executing the
command under nominal and non nominal conditions.
A planvariable (whose identifier is prefixed with
i to distinguish it from external world fluent identi-
fiers) associates a value with a named variable. Its
value may be set either from the results of an external
command script or internal planner command (such
as assignment). Such variables can be used for rep-
resenting the value of fluents in the world (see below
on knowledge representation). The value of a plan
variable may change during execution of the plan.
A job’s start conditions are a set of formulas de-
scribing conditions involving either a plan variable,
job status or the value of a world fluent whose value
is continuously sensed and accessible to the planner
at runtime.
3.1 Plan Execution Dynamics
Execution of the plan consists of letting the plan and
world state evolve according to the following dynam-
ics, which consists of three forms of event:
• Action Start Event - In order to execute the plan
the plan executor constantly monitors all condi-
tions which are defined as start conditions. This
is why start conditions must be formulas involv-
ing either plan variables or world fluent values to
which the scheduler has direct and continuous ac-
cess. As soon as all of the conditions defined in
the start conditions for a job become true and the
current job state is Initialised the job state is set
to Executing. If the job command is an external
command it is run in the real world via the op-
erating system command line using the specified
parameters values - at which point any immediate
effects of the command start in the external world
take place. If the command is an internal com-
mand (such as a planner variable assignment) it
executes that command and updates the specified
planner variable accordingly.
• External Action Completion - When the action
command process (which may have a varying du-
ration) has completed (and any effects of the com-
mand taken place in the external world), any re-
turned results from the action are assigned to the
specified plan variable and the job status is set to
Completed.
A NEW REPRESENTATION AND PLANNER FOR COMPUTER BATCH JOB SCHEDULING, EXECUTION
MONITORING, PROBLEM DIAGNOSIS AND CORRECTION
279
• Exogenous events - these are events which are not
under direct control of the planner and occur ac-
cording to various conditions becoming true in the
external world. These events must also be rea-
soned about during plan construction.
3.2 Plan Variables and Knowledge
Representation
Fluents which are directly sensable with little or no
cost and which may be continuously sensed are con-
sidered automatic fluents, such fluents may be di-
rectly referenced in the plan (e.g. a start condition
for a job can involve an automatic fluent). Reason-
ing about fluents which are not directly sensable and
attainment of knowledge goals is achieved by using
the approach of epistemic fluents where for world flu-
ent values which are not directly observable a plan
variable is created which represents the value of that
fluent in the real world. For example if actions need
to be predicated on the value of the database inter-
nal state (the world fluent dbstate which is not di-
rectly observable), the planner can create a plan vari-
able called i dbState which represents the value of
the fluent in the real world. This variable can then
be used to control action execution or used as an ac-
tion parameter. These are similar to the concept of
runtime variables used by the Puccini planner. A goal
to gain knowledge of the database internal state would
be represented during plan construction as the subgoal
i dbState = dbstate. The planner can achieve this
knowledge goal by assigning i dbState based on the
output of appropriate sensing actions. Using this con-
crete concept of knowledge, knowledge goals may be
formulated and reasoning about using standard causal
reasoning (without the need for use of modal logic as
is used for example in the PKS planner).
4 ACTION LOGIC
The planning problem is the problem of defining the
initial state of the plan such that the combined plan
and world system evolves so that a state satisfying the
goal conditions occurs on the trajectory of every pos-
sible initial contingency. In order to construct such a
plan, the planner requires an action logic which is able
to perform forwards temporal projection based upon
the initial plan and world state, to do this every job
command must have a corresponding set of event de-
scriptions which define what the start and completion
effects of the command execution is on both the plan
state (job status, planner variables) and fluents in the
external world. Exogenous events must also be rea-
soned about. The event definitions used by the action
logic are STRIPS (Fikes, 1971) style descriptors with
conditionswhich must hold for that event to occur and
the effect conditions produced by that event. These
Triggered events are defined by their trigger state de-
scriptor and effect state descriptors. The meaning of
the event descriptors is different from other planners
since all the events are considered as triggered events
- the occurrence of a state in which all the trigger con-
ditions hold is not just a prerequisite for that event but
it entails occurrence of the event and its effect condi-
tions. See table 1 for an example set of event defini-
tions for a job.
A state descriptor consists of a unique name (used
for readability purposes during inferences) and a set
of fluent conditions which hold in that state (simi-
lar to the state definition used in the fluent calculus
(Thielscher, 1999). Predefined names are reserved
for currentState and goalState. The conditions which
hold in a state are denoted by a set of condition predi-
cates Hold(currentState, condition) where condition
is a condition on a fluent (either internal or external)
e.g. freeDiskSpace ≥ 5000. Fluents not included
in the effect state definition, retain the same value as
prior to the event. In this approach, all changes (in-
cluding those arising from agent actions) are consid-
ered as a result of triggered events. In the dynamic
model all event effects are deterministic and all uncer-
tainty is represented in the initial state descriptor (any
condition not specified as holding in the currentState
is not determined). Contingencies are defined as a
sub-state of the current state defined by a further set
of conditions which hold, beyond those that hold in
the current state. e.g. Contingency(dbState = 0).
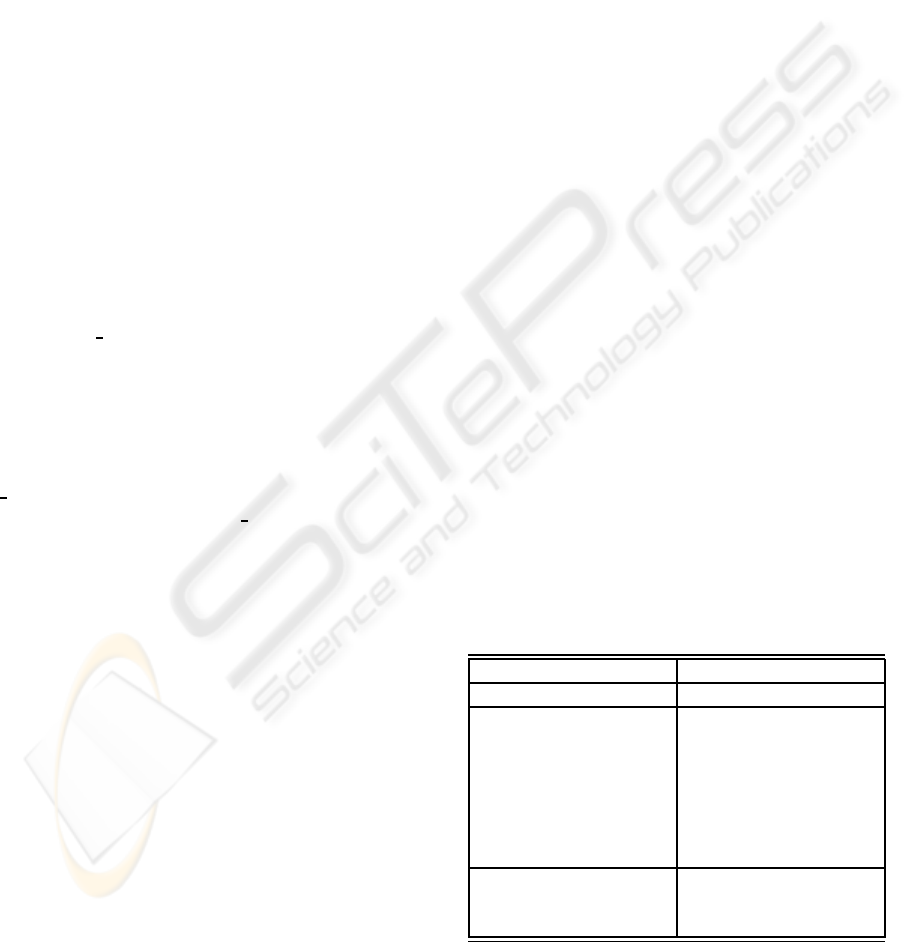
Table 1: Start, Successful and Failure Event definitions for
command ”genReport ?date”.
Trigger conditions Effect conditions
status = Initialised status = Executing
status = Executing∧ status = Completed∧
inputFile.exists =
True
report?date.exists =
True∧
report?date.contents=
?date∧
report?date.location =
localServer
status = Executing status = Completed
inputFile.exists =
False
Event occurrence is defined as the first occurrence
of its trigger state, not by a time value (as in the event
calculus (Shanahan, 2000)). The advantage of this is
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
280

that the same defined event can can occur at differ-
ent times on different contingencies. This allows for
reasoning about plan branch merges where an event
may draw its support from different causal sources
under different contingencies (which might involve
the event happening at different times under those dif-
ferent contingencies). Inferences exist to consolidate
proven occurrences on different contingencies so for
example if a state occurrence is proven on the con-
tingency where dbState = 0 and on the contingency
where dbState 6= 0 then the state occurrence is proven
on the trajectory of the current state.
The predicate Occurs (one of whose arguments is
a contingency descriptor) is used to reason about oc-
currences of trajectory predicates such as conditions,
states, events and partial order planning predicates
such as event orderings, protections (Weld, 1994) un-
der different contingencies. The Occurs predicate is
true when the specified trajectory predicate occurs on
all trajectories of any initial state which belongs to
that contingency.
Some of the key action logic inferences are shown
in tables 2, 3 and 6.
Table 2: State update inference.
Occurs(StateOn(triggerState), contingency)
=⇒
Occurs(StateOn(ef f ectState),contingency)∧
Occurs(OrderingOn(triggerState, e f fectState),
contingency)
Table 3: Causal support inference.
Occurs(StateOn(stateA), contingency1)∧
HoldsInState(stateA, conditionA)∧
(conditionA =⇒ conditionB)∧
Occurs(ProtectionOn(stateA, stateB, conditionA),
contingency2)∧
Occurs(OrderingOn(stateA, stateB, contingency3)
=⇒
Occurs(StateConditionOn(stateB, conditionB),
(contingency1∩ contingency2, ∩contingency3))
4.1 Partial Order Action Logic
Inferences
Since the actions have variable length durations, a
linear planning approach cannot be followed and in
order to perform forwards and backwards temporal
projection, the action logic must support partial order
planning predicates such as causal support, orderings
and protection of conditions between events. Back-
wards inferences must include resolution of threats
using the techniques of promotion, demotion and sep-
aration (Pryor and Collins, 1996) All of these forms
of reasoning must be supported in a contingent man-
ner - hence there are trajectory predicates defined to
allow contingent reasoning about occurrences of all
of these.
Due to space considerations the inferences can
only be sketched in this paper, but the worked exam-
ples are intended to illustrate some of the key infer-
ences.
5 IMPLEMENTED PLANNER
The planner approach for reasoning with this action
language is taken is that advocated by (Stone, 1998),
(Shanahan, 2000), of planning as an abductive infer-
ence process. The agent uses backwards inferences
which make abductivechoices about the jobs and plan
variables it places into the plan. Once a choice about
the plan components has been made, the planner per-
forms forwards inferences to determine the evolution
of the plan over time under different contingencies
and the plan is considered as complete once it has
been proved that the goal state occurs on all possible
contingencies. The planner was implemented using
the drools rules engine (JBoss, 2007), each inference
in the action logic corresponding to a production rule.
Drools contains an automated logical retraction facil-
ity which was used to implement search backtracking.
6 WORKED EXAMPLES
6.1 Handling Exogenous Events, Action
Monitoring and Triggered Actions
In this example (solved by the implemented planner)
from the previous discussion , the goal is to produce
a report file ”remoteReport1220” on a remote server.
A report generation batch job which takes a date pa-
rameter generates a report on the local server which
has contents corresponding to the specified date. The
process requires as input a file inputFile which is gen-
erated by an exogenous event. An ftp action exists
which copies a specified file from the local server to
the remote server under a new file name.
The event definitions for these are shown in tables
1, 4 and 5. Note, an object oriented naming conven-
tion is used to name fluents which correspond to at-
tributes of an object (such as a file).
The first key inference is an abductive infer-
ence to provide support for the goal condition
A NEW REPRESENTATION AND PLANNER FOR COMPUTER BATCH JOB SCHEDULING, EXECUTION
MONITORING, PROBLEM DIAGNOSIS AND CORRECTION
281
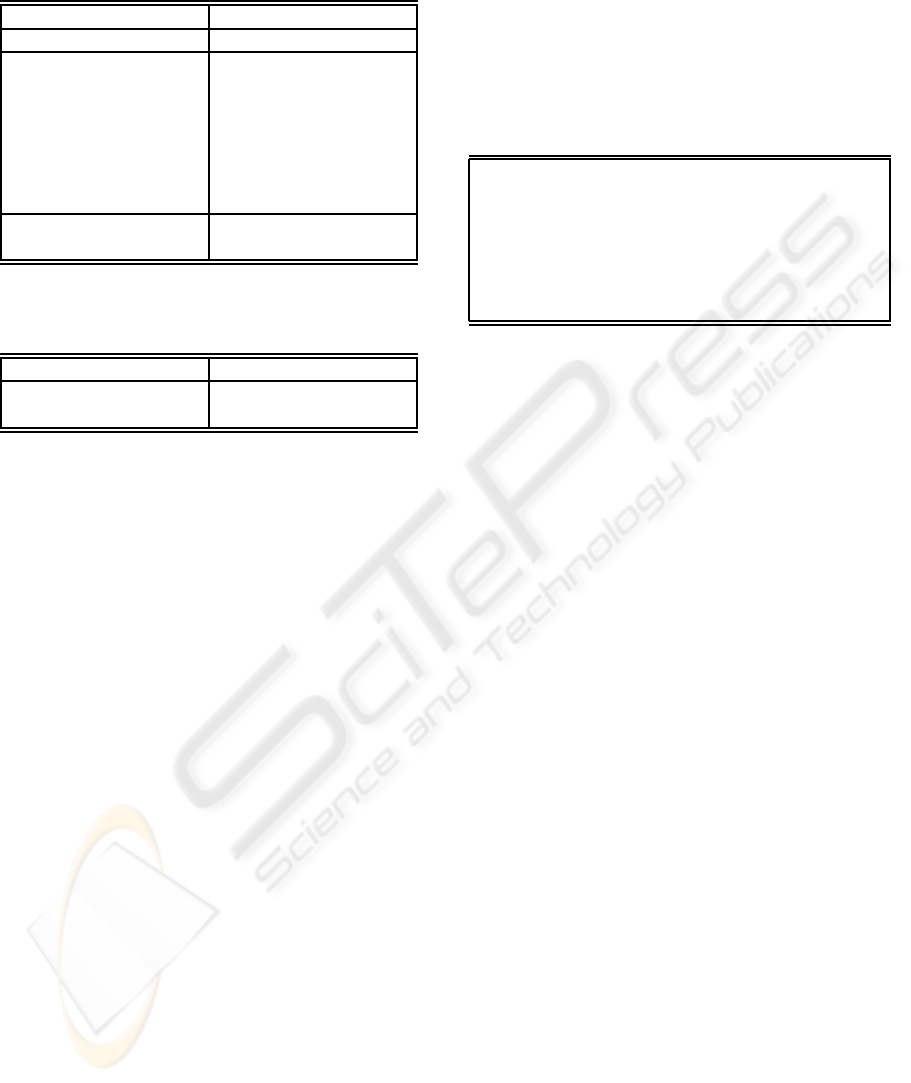
Table 4: Start, Success, and Failure event definitions for
action ”ft pToRemote ?file”.
Trigger conditions Effect conditions
status = Initialised status = Executing
status = Executing∧ status = Completed∧
?file.exists = True∧ remote?file.exists =
True∧
?file.location =
localServer∧
remote?file.location =
remoteServer∧
?file.contents =
?contents
remote?file.contents =
?contents
status = Executing status = Completed
?file.exists = False
Table 5: Event definition for exogenous event
externalFileGen.
Trigger conditions Effect conditions
inputFile.exists =
False
inputFile.exists =
True
remoteReport1220.exists = True by adding into the
plan a new job to run the action ftpToRemote
with the parameter ?file = ”Report1220” and in-
stantiating all its associated events (start event, suc-
cess event, fail event). It then sets subgoals to
prove that the ftp start event is triggered, that the
remoteReport1220.exists = True is protected from
the successful ftp event effect state to the goalState
and that successful event effect is ordered before the
goal state. Similar subgoals are created for the loca-
tion conditions.
Because a file existence is considered as an
automatically sensed fluent, the planner inserts
a start condition for the ftpToRemote job that
Report1220.exists = True in order for the job to
start - this becomes part of the trigger state defini-
tion for the ftp start event - which means that the
ftp command will not be executed until the condition
Report1220.exists = True is true.
(The file contents is not an automatically sensed
fluent so this cannot be inserted as a start condition
for the action).
Using the same forms of inference to provide sup-
port for the condition Report1220.exists = True the
planner creates a new job for ”genReport ?date” with
the parameter substitution ?date = ”1220”.
The planner achieves the required ordering be-
tween the report generation and ftp action by inserting
an explicit planner ordering between the two agent ac-
tions by adding genReportJob.status = Complete to
the start conditions for ftpToRemote.
Support for the inputFile.exists = True trigger
condition for genReportJob is obtained from the
event externalFileGen. Since the externalFileGen
trigger state has no conditions, using the inference
”All state conditions proven then state occurrence
proven” the planner is able to prove occurrence of the
externalFileGen event on all trajectories.
Table 6: All state conditions proven then state occurrence
proven.
∀condition ∈ Condition,
contingency ∈ Contingency
s.t.HoldsInState(state, condition)∧
Proven(Occurs(StateConditionOn(condition,
state), contingency)
=⇒
Proven(Occurs(StateOn(state), contingency)
From the occurrence of externalFileGen, us-
ing a series of forwards inferences, including
the ”State update inference”, ”All state conditions
proven then state occurrence proven”, and other
partial order inferences using orderings and pro-
tections the planner is able to prove occurrence
of the events externalFileGen, genReportJob suc-
cess, ftpToRemote success and occurrence of the
goalState on all trajectories.
The complete plan consists of the following:
(name: genReport1220,
command:"runReport 1220" ,
status:Initialised,
startConditions: inputFile.exists=True)
(name:ftpToRemote_Report1220,
command: "ftp Report1220",
status:Initialised,
startConditions: Report1220.exists=True,
genReport1220.status = Complete)
6.2 Planning with Knowledge Goals and
Merged Contingencies
This example (under which the planner implementa-
tion is currently being evaluated) is from the repair
database error scenario previously discussed where
the database error must be determined and the re-
pair action called with the appropriate error. There
is no action to directly determine the database inter-
nal error condition, instead the only available sens-
ing command is ”checkDB ?e” which checks whether
the database has a particular error e (a value of 1 or
2) The knowledge acquisition part of this problem is
analogous to the standard knowledge planning prob-
lem Safe combination problem (Petrick and Bacchus,
2002)).
The event schema definition for the internal plan
variable assignment action assign, the checkDB com-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
282

mand and repairDB action are shown in tables 7,8
and 9.
Table 7: Event definition for command ”assign ?x ?y”.
Trigger conditions Effect conditions
status = Initialised status = Completed
∧(?x =?y)
Table 8: Event definition for command ?result =
”checkDB ?e”.
Trigger conditions Effect conditions
status = Initialised status = Executing
status = Executing status = Completed
∧(?result =
(dbState =?error)
Table 9: Start, Success and Failure Event definition for
command ”repairDB ?error”.
Trigger conditions Effect conditions
status = Initialised status = Executing
status = Executing status = Completed
dbState =?e ∧dbState = 0
status = Executing status = Completed
dbState 6=?e
In the initial state :
Holds(currentState, dbState = 1|2) (where the ”|”
signifies that the value held is one of the specified val-
ues)
The goal is to repair the database error :
Holds(goalState, dbState = 0)
In order to provide support for this condition the
planner creates a repair job and an epistemic program
variable i dbState which is specified as the parame-
ter for the repair action. It then creates a subgoal that
i dbState = dbState at the time the repair job is run
(since the repair action only works if its runtime pa-
rameter is equal to the database error)
The planner establishes support for the condition
i dbState = dbState by adding a job with the assign-
ment command ”assign i x i y” with the substitutions
i x = i dbState, i y = 1 and with the additional re-
quired assumption that the initial contingency is one
where the condition dbState = 1 holds. This proves
causal support for i dbState= dbState but only on the
contingency dbState = 1. It similarly proves causal
support from ”assign i dbState 2” on the contingency
dbState = 2.
The planner must prevent the threats that these
jobs pose to each other’s support of i dbState =
dbState. It performs this threat resolution via sepa-
ration (Pryor and Collins, 1996) whereby a threat by
a conflicting action is resolved by ensuring that the
threatening action does not occur in the same contin-
gency where the threatened causal support is needed.
The planner determines that the ”assign i dbState 1”
command must occur on the contingency where
dbState = 1 and it must not occur on the contingency
where dbState 6= 1
In order to provide the necessary conditioning for
the ”assign i dbState 1” job the planner introduces
contingency control on this action by creating a new
boolean plan variable i dbStatus is 1 which repre-
sents the value of the truth/falsity of the proposition
dbState = 1. It adds truth of this planner variable as a
start condition to the ”assign i dbState 1” job.
The planner establishes the value of
i dbStatus is 1 using the sensing action command
”i dbState is 1 = checkDB 1”
To prove ordering of the ”repairDB i dbState”
command to after the epistemic fluent has been cor-
rectly set the planner adds i dbState6= null to the start
conditions to ensure it occurs after i dbState has been
set.
From forwards inferences the occurrence
of i dbState = dbState in the trigger state for
”repairDB i dbState” success event is proven on
the contingency dbState = 1 and similarly it is also
proven to occur on contingency dbState = 2. Using
an inference which combines proven occurrences of
the same event across different contingencies, the
planner proves the occurrence i dbState = dbState
in the repairDB i dbState trigger state on all the
trajectories of the current state. From this it is able to
prove occurrence of the successful repair action and
the goal state on the trajectory of the current state.
The final plan is:
(name: i_dbState, value: null )
(name: i_dbState_is1, value:null )
(name: i_dbState_is2, value:null)
(name:check1,
command: i_dbState_is1="checkDB 1" ,
status:Initialised, startConditions:)
(name:check2,
command: i_dbState_is2="checkDB 2" ,
status:Initialised, startConditions:)
(name:assign1, command: i_dbState=1 ,
command: i_dbState=1 ,
status:Initialised,
startConditions:i_dbState_is1=True)
(name:assign2, command: i_dbState=2 ,
command: i_dbState=2 ,
status:Initialised,
startConditions:i_dbState_is2=True)
A NEW REPRESENTATION AND PLANNER FOR COMPUTER BATCH JOB SCHEDULING, EXECUTION
MONITORING, PROBLEM DIAGNOSIS AND CORRECTION
283

(name:repairDB,
command: "repairDB i_dbState" ,
status:Initialised,
startConditions: i_dbState not null )
7 CONCLUSIONS AND FUTURE
WORK
In this paper we have presented a new contingent plan
representation which offers advantages with respect
to action monitoring, handling of triggered events,
compactness of plan branch representation and which
can handle planning for knowledge goals. We have
briefly sketched how a planner is able to reason about
this plan representation and how it can generate plans
for some key domain scenarios. An implementation
has been successfully demonstrated on the first ex-
ample, and is currently being evaluated against the
second example. A further evaluation is planned on
an example where the value of two independent flu-
ents must be sensed - demonstrating that search time
scales linearly with the number of sensed fluents - (not
exponentially as is the case with a planner which does
not allow execution branch remerging.) Future exten-
sions to the planner could be made by the introduction
of other inference rules - for example temporal infer-
ences by reasoning about time conditions - and by the
introduction of specialised inferences to build more
complex predesigned plan structures - with validation
of the constructed plan using the forwards dynamical
inferences.
Although created for the computer batch job do-
main the representation could be applied in any do-
main where actions are triggered in response to exter-
nal events, this includes workflows and event driven
architectures. It is hoped that this representation will
undergo further future development and application to
such domains.
REFERENCES
Bertoli, P., Cimatti, A., Pistore, M., Roveri, M., and
Traverso, P. (2001). Mbp: a model based planner. In
Proceedings of the IJCAI’01 Workshop on Planning
under Uncertainty and Incomplete Information, Seat-
tle.
Bonet, B. and Geffner, H. (2001). Gpt: A tool for planning
with uncertainty and partial information. In In Proc.
IJCAI01 Workshop on Planning with Uncertainty and
Incomplete Information, pages 82–87.
ComputerAssociates (2002). Autosys.
Draper, D., Hanks, S., and Weld, D. (1994). Probabilistic
planning with information gathering and contingent
execution. pages 31–36. AAAI Press.
Ennis, R. (1986). A continuous real-time expert system
for computer operation. IBM J. research development,
30(0):0.
Fikes, N. (1971). Strips: A new approach to the applica-
tion of theorem proving to problem solving. Artifical
Intelligence, 2:189–208.
Golden, K. (1998). Leap before you look: Information gath-
ering in the puccini planner. In Proceedings of AIPS,
pages 70–77.
Grosskreutz, H. and Lakemeyer, G. (2000). cc-golog: To-
wards more realistic logic-based robot controllers. In
In AAAI’2000, pages 476–482.
JBoss (2007). Drools 4.0.7.
Levesque, H. J., Reiter, R., Lesperance, Y., Lin, F., and
Scherl, R. B. (1997). GOLOG: A logic programming
language for dynamic domains. Journal of Logic Pro-
gramming, 31(1-3):59–83.
Murch, M. (2004). Autonomic computing, chapter Introduc-
tion. IBM Press.
Petrick, R. and Bacchus, F. (2002). A knowledge-based
approach to planning with incomplete information and
sensing. In Proceedings of AIPS’02, pages 212–221.
Pryor, L. and Collins, G. (1996). Planning for contingen-
cies: A decision-based approach. Journal of Artificial
Intelligence Research, 4:287–339.
Shanahan, M. (2000). An abductive event calculus planner.
Journal of Logic Programming, 44:207–239.
Stone, M. (1998). Abductive planning with sensing. AAAI.
Thielscher, M. (1999). From situation calculus to fluent cal-
culus: State update axioms as a solution to the infer-
ential frame problem. Artificial Intelligence, 111:277–
299.
UC4 (2008). Application automation in enterprise workload
automation.
Weld, D. S. (1994). An introduction to least commitment
planning. AI Magazine, 15(4):27–61.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
284
