
SELF-ADAPTIVE MULTI-AGENT SYSTEM FOR
SELF-REGULATING REAL-TIME PROCESS
Preliminary Study in Bioprocess Control
Sylvain Videau, Carole Bernon and Pierre Glize
Institut de Recherche Informatique de Toulouse, Toulouse III University
118 Route de Narbonne, 31062 Toulouse, cedex 9, France
Keywords:
Adaptive control, Multi-agent systems, Cooperation, Bioprocess.
Abstract:
Bioprocesses are especially difficult to model due to their complexity and the lack of knowledge available to
fully describe a microorganism and its behavior. Furthermore, controlling such complex systems means to
deal with their non-linearity and their time-varying aspects.
In order to overcome these difficulties, we propose a generic approach for the control of a bioprocess. This
approach relies on the use of an Adaptive Multi-Agent System (AMAS), acting as the controller of the bio-
process. This gives it genericity and adaptability, allowing its application to a wide range of problems and
a fast answer to dynamic modifications of the real system. The global control problem will be turned into a
sum of local problems. Interactions between local agents, which solve their own inverse problem and act in
a cooperative way, will enable the emergence of an adequate global function for solving the global problem
while fulfilling the user’s request.
An instantiation of this approach is then applied to an equation solving problem, and the related results are
presented and discussed.
1 INTRODUCTION
Regulating a dynamic system is a complex task, espe-
cially when we consider a real-world application im-
plying real-time constraints and limitations on com-
putational power. Biology offers some of the best ex-
amples of such systems when bioprocesses have to be
regulated.
Controlling a bioprocess is keeping a quasi-
optimal environment in order to allow the growth of
the expected microorganisms, while limiting and sup-
pressing any product with toxic characteristics. How-
ever, this task is difficult, and this difficulty arises
from, on the one hand, the bioprocess complexity,
and, on the other hand, the amount of elements and
interactions between them that are to be taken into
account. Furthermore, controlling such a system im-
plies dealing with uncertainty coming from lags in
measures and delays in reactions.
Another point that has to be considered is the lack
of online (which means obtained directly from the
bioprocess) measures available. This limits the visi-
ble indicators of the consequences of the action of the
control, and leads the observer to rely on inferred data
in order to describe the biological state of the system.
In this paper, we present a generic approach
for controlling bioprocesses that uses an Adaptive
Multi-Agent System (AMAS). Section 2 presents an
overviewof the existing methodsof control before po-
sitioning our approach in section 3. This section also
expounds what are AMAS and details the features of
the agents composing the proposed one. Section 4
instantiates this system to an equation solving prob-
lem and gives some experimental results. Finally, the
conclusions and perspectives that this work offers are
discussed.
2 BIOPROCESS CONTROL: A
BRIEF OVERVIEW
Mathematically speaking, control theory is the sub-
ject of an extensive literature. Basically, two kinds
of control systems may be considered: the first one
is an open loop, meaning that there is no direct con-
30
Videau S., Bernon C. and Glize P. (2010).
SELF-ADAPTIVE MULTI-AGENT SYSTEM FOR SELF-REGULATING REAL-TIME PROCESS - Preliminary Study in Bioprocess Control.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 30-37
DOI: 10.5220/0002725100300037
Copyright
c
SciTePress

nection between the outputs of the controlled system
and its inputs. The control being carried out without
any feedback, it only depends on the model within
the controller itself. The second kind of control is a
closed loop, which is focused on the feedback, allow-
ing the control system to make actions on the inputs
by knowing the system’s outputs. In those two cases,
the function determiningthe control to apply is named
the control law. The control system presented here is
designed as a closed loop.
2.1 PID Control
Currently, the most widespread approach to control
bioprocesses is the Proportional-Integral-Derivative
(PID) controller. Controlling with such a tool means
that three different functions will be applied to the re-
ceived feedback, in order to select the adequate con-
trol. These functions are i) the proportional, which
computes the current error multiplied by a “propor-
tional constant”, ii) the integral, which takes into ac-
count the duration and magnitude of the error, by
summing their integral and multiplying by an “inte-
gral constant” and finally iii) the derivative, which es-
timates the rate of change of this error, allows to ob-
serve its variation, and multiplies it by a “derivative
constant”. These three functions are then summed.
However,several points need to be treated to make
this approach adaptive enough to follow the biopro-
cess dynamics; the different constants appearing in
the formulas have still to be defined and a way to al-
low them to be adjusted during the bioprocess has to
be found. Such a modification may be done by using
methods like Ziegler-Nichols (Ziegler and Nichols,
1942) or Cohen-Coon (Cohen and Coon, 1953).
This PID approach is quite generic, and can be ap-
plied to a wide range of control systems. However, its
performances in non-linear systems are inconsistent.
This drawback led to the hybridization of this method
by adding mechanisms relying on fuzzy logic (Visi-
oli, 2001), or artificial neural networks (Scott et al.,
1992).
2.2 Adaptive Control
The differences existing in the results coming from
distinct runs of the same bioprocess led us to study the
field of adaptive control; these differences are for ex-
ample a noise addition or a delay in the chemical reac-
tions that modify the system dynamics. This problem
can be overcome by applying methods that dynami-
cally modify the control law of the controller.
There are mainly three different categories of
adaptive controller, the Model Identification Adaptive
Control (MIAC), the Model Reference Adaptive Con-
trol (MRAC), and the Dual Control.
MIAC systems (Astrom and Wittenmark, 1994)
use model identification mechanisms in order to en-
able the controller to create a model of the system
it controls. This model can be created from scratch
thanks to the observed data, or by using an already
known basis. The identification mechanism updates
the model using values coming from inputs and out-
puts of the controlled system.
MRAC systems, suggested by (H.P. Whitaker and
Kezer, 1958), employ a closed loop approach modi-
fying the parameters of the controller thanks to one
or several reference models. This time, the system
does not create a model of the bioprocess, but it uses
an existing model to update the control law by ob-
serving the difference between the predicted output
and the measured ones. This adjustment is generally
applied by the use of the MIT rule (Kaufman et al.,
1994), which is a kind of gradient descent minimiz-
ing a performance criterion computed from the error
measured.
The last system is called Dual Controller (Feld-
baum, 1961) and is especially useful for controlling
an unknown system. In fact, such a control system
uses two kinds of actions, the first one is a normal con-
trol, which aims at leading the system toward a certain
value, while the other one is a probing action, which
allows the controller to obtain more information on
the controlled system by observing its reaction. The
difference here is that the probing action is physically
applied on the system, and not only predicted by the
use of a model.
2.3 Intelligent Control
The last kind of controller is a subtype of the adap-
tive control, called intelligent control. It focuses on
the use of methods coming from artificial intelligence
to overcome problems linked to non-linearity and dy-
namic systems.
In the case of bioprocess control, the most used
intelligent controller is the artificial neural network
(ANN). Initially applied to bioprocesses to infer some
non-measurable variables, it was then used to control
such processes, or to improve already existing control
methods by providing adaptation. Furthermore, ANN
appear in pattern recognition control such as (Megan
and Cooper, 1992).
Unfortunately, the black box aspect of ANN is a
limit to their use in the bioprocess control. And even
if some works exist to reduce this aspect (Silva et al.,
2000), it is to the detriment of their adaptability.
Among the Artificial Intelligence techniques used
SELF-ADAPTIVE MULTI-AGENT SYSTEM FOR SELF-REGULATING REAL-TIME PROCESS - Preliminary Study
in Bioprocess Control
31

in intelligent control, we can also find expert sys-
tems (Dunal et al., 2002) using knowledge databases
to select the control needed, and fuzzy logic (Visioli,
2001).
Bayesian controllers can be considered like in-
telligent controllers too, especially with the use of
Kalman filters. This mathematical approach uses two
distinct steps to estimate the state of the system. First,
a prediction step enables to estimate the current state
of the system using the estimation made in the previ-
ous state. Then, an update step improves this predic-
tion with the help of observationsmade on the system.
2.4 Limitations
However,these approaches generally lack of reusabil-
ity: the work required to apply them on a specific
bioprocess is useless for applying them on another
one. Indeed, the variables of mathematical models
are specifically chosen to fit with a specific biopro-
cess, for example in the case of PID; and the learn-
ing set needed to train adaptive methods such as ANN
are quite difficult to obtain on top of being meaning-
ful only in a restricted range of variations of the bio-
process. This over-specification limits the predictive
power of the controller when the bioprocess diverges
from the expected scheme, and so, such a controller
is unable to bring back the bioprocess into a desired
state. Generally, black box models are poor at ex-
trapolating and weak in accomodating lags (Alford,
2006). The approach presented in this work, and its
perspectives,aim at reducing the impact of such draw-
backs, by offering a generic and adaptive control us-
ing a Multi-Agent System (MAS).
3 CONTROL MULTI-AGENT
SYSTEM (CMAS)
Using a MAS to control and manage a process is
an approach already experimented, for example in
(Taylor and Sayda, 2008). However, the complexity
brought by a bioprocess implies the use of an adap-
tive architecture to organize the CMAS. As a result,
the principles governing the MAS proposed for con-
trolling a system in real-time come from the Adaptive
Multi-Agent System (AMAS) theory (Gleizes et al.,
1999). This AMAS has to determine which control
to apply on the bioprocess in order to drive the val-
ues of certain variables to reach a user-defined ob-
jective. This section begins by a description of these
AMAS principles before giving an overview of the
MAS and its positioning in the global control mech-
anism. The abilities and behavior of the agents com-
posing this AMAS are then detailed before delineat-
ing the generic aspects of the proposed approach in
order to instantiate it according to a specific problem.
3.1 The AMAS Approach
The functional adequacy theorem (Gleizes et al.,
1999) ensures that the global function performed by
any kind of system is the expected one if all its parts
interact in a cooperative way. MAS are a recog-
nized paradigm to deal with complex problems and
the AMAS approach is focused on the cooperative be-
havior of the agents composing a MAS.
Here, cooperation is not only a mere resource or
task sharing, but truly a behavioral guideline. This
cooperation is considered in a proscriptive way, im-
plying that agents have to avoid or solve any Non Co-
operative Situation (or NCS) encountered. Therefore,
an agent is considered as being cooperative if it veri-
fies the following meta-rules:
• c
per
: perceived signals are understood without
ambiguity.
• c
dec
: received information is useful for the
agent’s reasoning.
• c
act
: reasoning leads to useful actions toward
other agents.
When an agent detects a NCS ( ¬c
per
∨ ¬c
dec
∨
¬c
act
), it has to act to come back to a cooperative
state. One of the possible actions such an agent may
take is to change its relationships with other ones
(e.g., it does not understand signals coming from an
agent and stops having relationships with it or make
new ones for trying to find other agents for helping it)
and therefore makes the structure of the global sys-
tem self-organize. This self-organization led by co-
operation changes the global function performed by
the system that emerges from the interactions between
agents. The MAS is thus able to react to changes
coming from the environment and therefore becomes
adaptive.
3.2 Structure of the CMAS
The AMAS described in this paper relies on the use of
an existing model of the bioprocess it has to control.
This model may be composed of any kind of different
submodels (mathematical equations, ANN, MAS...)
because this point only influences the instantiation of
our agent detailed in section 3.2.2. Basically, a super-
position of agent composing the CMAS on the bio-
process model must be done in order to create the
structure of the CMAS. Figure 1 illustrates an exam-
ple of such a superposition where one agent is associ-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
32
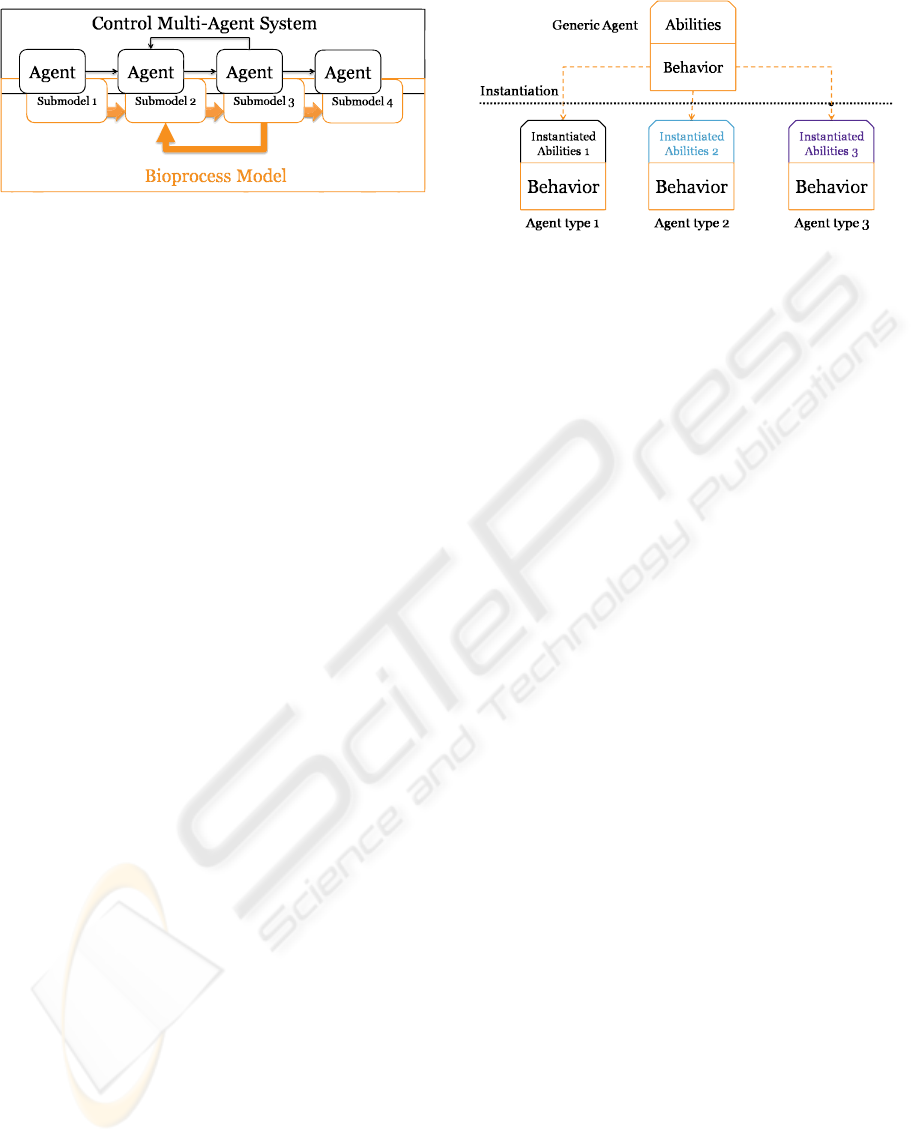
Figure 1: Example of superposition of agents on the biopro-
cess model.
ated with one submodel, but it would also be possible
to describe one submodel with several agents. This
choice is up to the system designer and offers an im-
portant flexibility, especially in the granularity of the
created system.
When the general design of the CMAS is ob-
tained, the description of the agents that are compos-
ing it is performed following the AMAS approach.
3.2.1 Generalities on CMAS Agents
Each of the agents composing the CMAS represents
a variable, or a set of variables such as the quanti-
ties of different elements in a bioprocess, on which
they have objectives of different criticity. This critic-
ity symbolizes the priority of the objective, and agents
can compute it thanks to the difference between their
current value and the expected one. The main goal of
an agent is to satisfy its most critical objective, which
means to bring a variable toward a certain value.
Agents that compose the CMAS follow a common
model, but they can be instantiated in different ways.
This phenomenon is detailed in Figure 2, underlin-
ing the fact that even if their ability are implemented
differently, their behavior stay the same and so, the
MAS is always composed of cooperative agents that
are able to interact with one another.
3.2.2 Abilities of CMAS Agents
As stated by the AMAS approach, an agent has a
strictly local view. From this local point of view, it
computes its own objective which may be modified
by the communication between agents. As a result,
an agent must be able to evaluate the current objec-
tive that it has to achieve, and to update it according to
the evolution of its criticity. This ability includes the
need to communicate with other agents, and to man-
age a set of received messages, by sorting them, or
aggregating them according to the problem, in order
to extract the current objective, which has the highest
criticity.
Figure 2: Instantiation of agents.
Our control system supposes the existence of a
model of the bioprocess which has to be controlled.
This model is used by the agents, which are able to
extract certain abilities from it.
These abilities are the observation and the use of
a local part of the bioprocess model. An agent is able
to virtually inject some values (without any real con-
trol action) at the input points of the local model it
observes in order to extract the corresponding output
values. These observations enable this agent to have
an idea of the variation direction that it has to apply in
input for obtaining a desired output. Therefore, this
mechanism grants an agent the abilities of its own di-
rect problem solving, and gives it the tools needed to
treat its own inverse problem, by determining which
inputs it has to apply for achieving a certain output.
For example, let us consider an equation y = f(x).
At time t, this equation is y
t
= f(x
t
).
Then, at t
′
= t + 1, we obtain y
t
′
= f(x
t
+ ∆x), this
∆x being a light variation of x.
Finally, by observing the sign of y
t
′
− y
t
, the agent
is able to find the modification ∆x which moves y
closer to its objective.
Thus, agents are able to deal with their inverse
problem without needing a model that describes their
inverse problem, such as the lagrangian.
Finally, each agent is able to compute its own ob-
jective, which is a set of values that the agent aims
at. This computation depends on the communication
between agents (described in part 3.2.3), and on the
observation that an agent is making on its own local
model. This objective can also be established by the
user.
3.2.3 Behavior of CMAS Agents
The main mechanism guiding the behavior of the
agents rests on a model in which this behavior is di-
vided into two categories: the Nominal and the Co-
operative one. The Nominal behavior describes the
default behavior of an agent, the one used when this
SELF-ADAPTIVE MULTI-AGENT SYSTEM FOR SELF-REGULATING REAL-TIME PROCESS - Preliminary Study
in Bioprocess Control
33

agent has no need to process one of the Non Co-
operative Situations (NCS) described in 3.1, while
the Cooperative behavior enables it to overcome the
NCS met during the control. This Cooperative be-
havior is itself divided into three different behaviors.
First, Tuning consists in trying to tweak parameters to
avoid or solve a NCS. If this behavior fails to make
an agent escape from this NCS, Reorganization takes
place. This Reorganization aims at reconsidering the
links established with other agents. Finally, Evolution
enables the possibility for an agent to create another
agent, or to self-destruct because it thinks itself as to-
tally useless.
In the bioprocess control, the Nominal behavior
has been instantiated in the following way. The agents
communicate with one another in order to share their
non-satisfaction degrees, and solve them if possi-
ble. This non-satisfaction degree is tied to a vari-
able which value does not satisfy the objectives of the
agent. Two different kinds of messages can be sent:
• A Request message which expresses a non-
satisfaction of the sending agent and asks for an
action of control in order to change the value of
the problematic value.
• An Answer message which notifies an applied
control, or the observation of the modification of
a value observed from the model by the agent.
As a consequence, even if two agents come from
different instantiations, they share the same Nominal
behavior which consists in sending requests asking
for the modification of values that did not satisfy the
agent, and acting if possible in order to answer those
requests by carrying out a control action.
These two points are completed by the Coopera-
tive behavior of Tuning stating that an agent receiving
a request, to which it cannot answer positively, is able
to modify it for conveying this modification towards
the other agents linked with it. This modification is
applied in order to make the request relevant to the re-
ceiving agent. It ensures that this request will be use-
ful and comprehensible for these agents, by asking for
modifications on variables that they know about. The
inverse problem solving ability of an agent is used
during this modification to decide which are the ad-
justments needed on the inputs to obtain the desired
output.
The control can also be partially done when an
agent is unable to make it completely; for example,
if the agent is not permitted to make a modification of
sufficient amplitude. In this case, it makes the max-
imum control possible and then, sends an answer to
notify this modification to the other agents. Thus, if
this objective is still the most critical for the agent
source of the request, then a request related to the
same objective will be sent again, and will finally be
answered positively when another control will be pos-
sible. So, this behavior is still a Tuning behavior.
Eventually, in order to solve a specific control
problem with this approach, our agents’ abilities have
to be instantiated according to the problem. For exam-
ple, the methods used to observe and use models on
which the agents are created must be defined depend-
ing on the kind of model used. The way the agents
compute their current objective has also to be instan-
tiated. To summarize, all the abilities described in
section 3.2.2 may be implemented in different ways,
without modifying the behavior of the agents. So, the
MAS created for the control of bioprocesses can be
composed of any number of different kinds of agents,
provided that these agents possess the described abil-
ities, instantiated to fulfill their role, and follow the
same behavior.
In order to evaluate the control system that was de-
veloped, an instantiation to an equation solving prob-
lem was carried out.
4 EXAMPLE OF AN EQUATION
SYSTEM
The goal of this example is to modify dynamically the
values of some variables to fulfill some objectivesthat
the user put on other variables. These objectives are
threshold values that the variable must reach and the
user can modify them during the simulation.
4.1 Description of Agents
Two different types of agents were instantiated:
Equation Agents and Variable Agents.
Figure 3 explains how the MAS is generated from
a mathematical equation. First, a Variable Agent is
created for each variable appearing in the different
equations. A Variable Agent is an agent that can make
a control action by modifying the value of the math-
ematical variable associated with it. The model used
by this agent is simply a model of the mathematical
variable, namely the variable itself. Therefore, in-
verse and direct problem solvings are trivial for such
an agent, the result being the value of the mathemat-
ical variable. Finally, a Variable Agent can be the
target of user-defined objectives defining a value to
achieve.
After Variable Agents are created, an Equation
Agent is added for each mathematical equation be-
longing to the system to solve. Each Equation Agent
relies on the model of the mathematical equation it
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
34
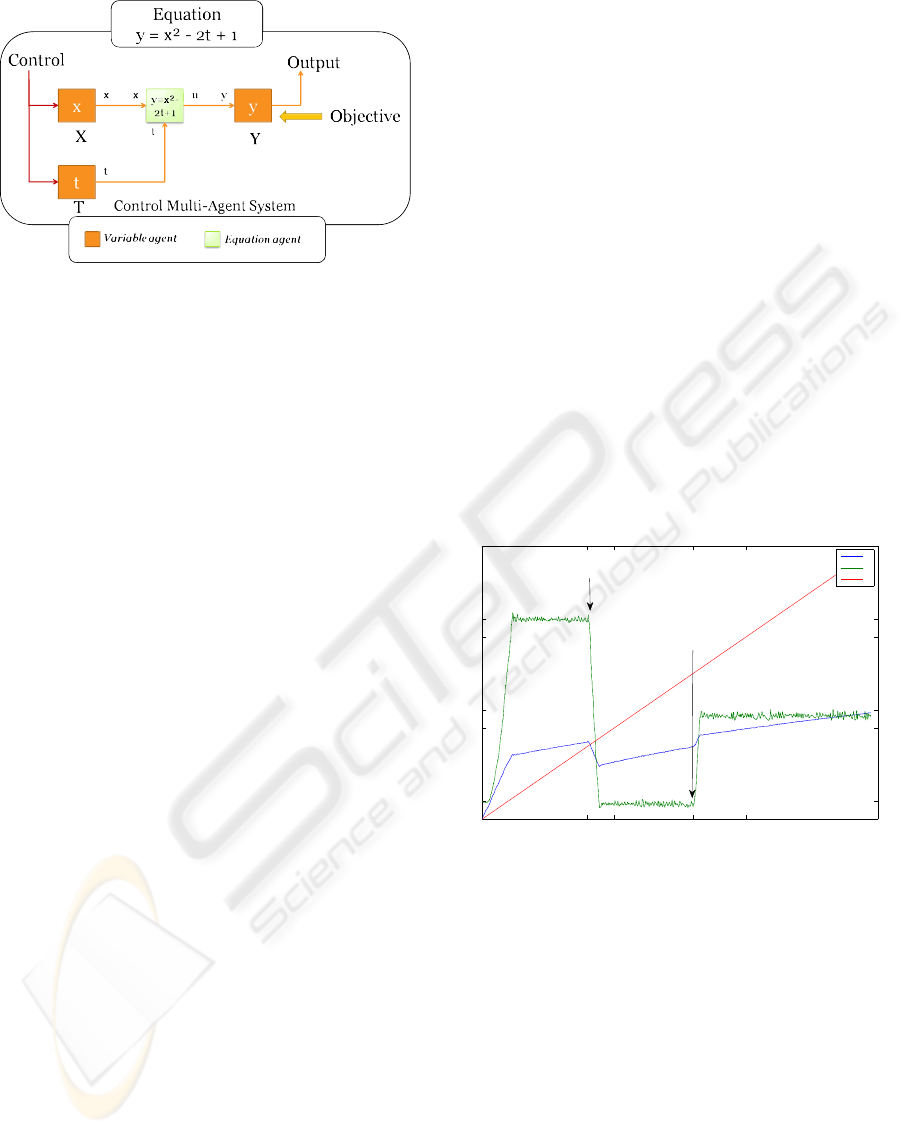
Figure 3: Creation of the CMAS from an equation.
represents and this agent is able to know any output
generated from a set of inputs thanks to its direct prob-
lem solving ability. Here, the inverse problem solving
mechanism uses the same model, an Equation Agent
tunes the inputs and, by observing the generated out-
puts, is able to estimate the modification needed to get
closer to its objectives. However, while an Equation
Agent is able to compute the amount and the direction
of the modification to apply, it cannot make any con-
trol action. It has then to create requests and sends
them to the corresponding Variable Agents.
When this step is done, an objective is allocated
to a Variable Agent representing the output of the sys-
tem, e.g., the agent Y on Figure 3. Agents X and T
are able to apply control actions.
Finally, a last type of agent, named Independent
Variable Agents, is derived from the Variable Agent
one to which it adds a specific ability. Such an agent
cannot make control actions but, instead, it represents
a variable which value is modified over time, accord-
ing to an inner function. That means that an Inde-
pendent Variable Agent may receive requests but will
never be able to fulfill them. On the other hand, at
each simulation step, it will send an answer to no-
tify the modification of its variable to other agents.
The interest of this agent is to underline how the other
Variable Agents act to make up for the drift brought
by this uncontrolled modification.
The relationships between the agents composing
the equation control system are as follows: an Equa-
tion Agent is linked, at its inputs, with every Variable
Agent or Independent Variable Agent from the math-
ematical equation. Its outputs are connected with the
Variable Agent representing the result variable. Com-
munication between agents follows these links.
4.2 Experimental Results
This section describes three examples of equation sys-
tems, highlighting different aspects of the presented
approach. In these examples, the agents are con-
strained to update their value progressively, meaning
that Equation Agents do not send the correct value
that they have to reach to Variable Agents, but rather
a modification step toward this value. This fact comes
from the implementation of the inverse problem solv-
ing on Equation Agents, whose goal is to drive its in-
puts gradually toward the expected value, and not in
a single jump. On top of that, when a Variable agent
is created, it is named after the capital letter of the
mathematical variable that it represents.
4.2.1 Controlling Single Polynomial Equation
This example consists of a single equation y = x
2
−
2t + 1, made up of a Variable Agent Y, which re-
ceives objectives from the user. Inputs are a Variable
Agent X and an Independent Variable Agent T. Dur-
ing the process, the objective of agent Y is changed
two times, depicted by arrows on Figure 4. Initially,
its goal is 11, then the two changes occur at time 400
and time 800 when the objective is respectively set to
1 and 6.
0 500 1000 1500400 800
0
5
10
15
11
1
6
Simulation Step
Value
X
Y
T
Objective change 1
y = 1
Objective change 2
y = 6
Figure 4: Results from the control of an introductory exam-
ple.
Results presented in Figure 4 (on which time is
expressed as simulation steps) highlight the reaction
of the control performed by X, which compensates
the uncontrolled evolution of T, while reacting to the
objectives changes made on Y. The delay to reach the
objective value when Y changes its goal comes from
a maximum limit on the modification enforceable for
each simulation step.
4.2.2 Controlling Multiple Polynomial
Equations
This example, presented in Figure 5, is composed
of 4 different equations, with a total of 10 variables
SELF-ADAPTIVE MULTI-AGENT SYSTEM FOR SELF-REGULATING REAL-TIME PROCESS - Preliminary Study
in Bioprocess Control
35
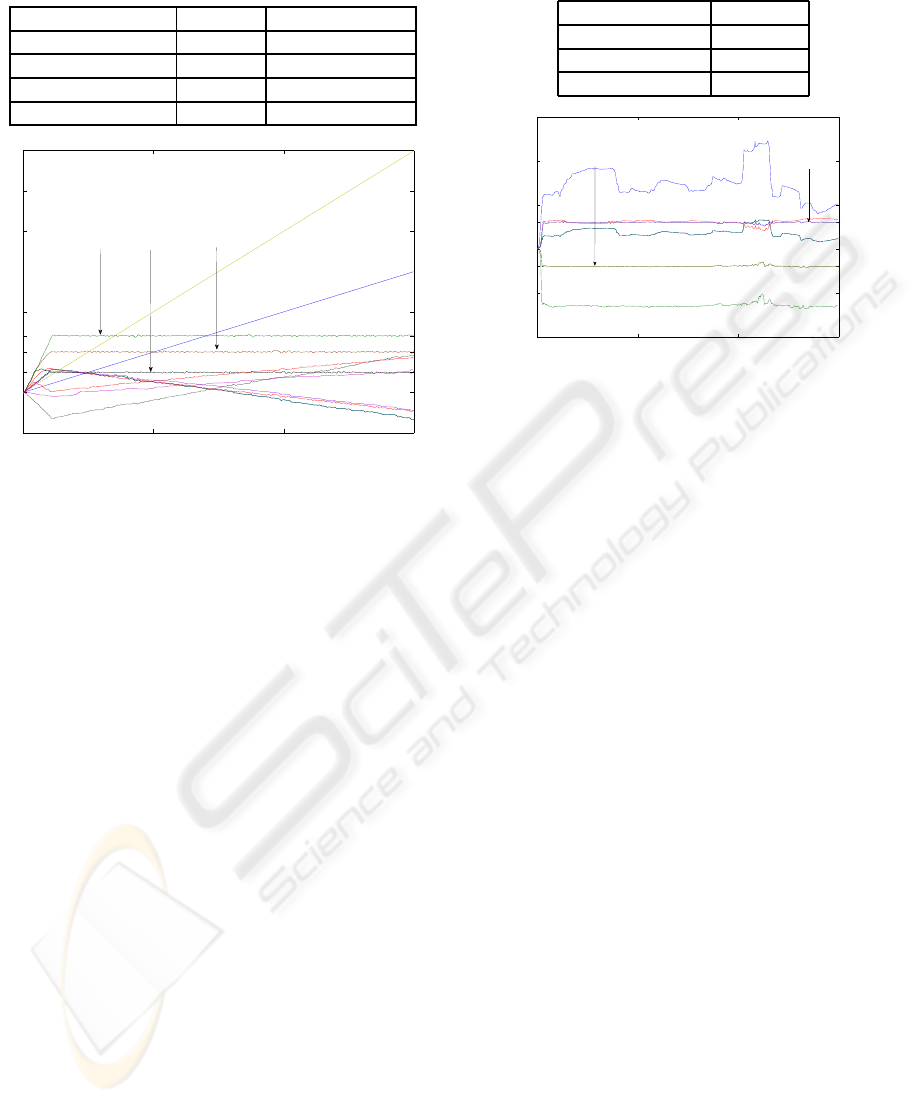
Table 1: “Multiple Polynomial” Equation Data.
Equations Variables Independent Var.
u = 0.2x+ y+ 0.3t u, x, y t
v = 0.8y + z v, y, z
w = 0.4x− a+ o w, x, a o
x = d − 0.4e x, d, e
0 500 1000 1500
−10
0
10
20
40
50
60
5
14
Simulation Step
Value
W = 14
V = 5
U = 10
Figure 5: Results from the control of the multiple polyno-
mial example.
whereof two of them are independent. Three objec-
tives are defined at time 0 (10 for U, 5 for V and 14
for W) and remain static during the process. Those
three variables are selected to receive objectives be-
cause they represent the outputs of the system, they
are not used as an input for another equation. The full
equations data are detailed in Table 1.
This example shows how multiple equations, that
share variables, and can send antagonist objectives to
them, are able to fulfill all the defined objectives. The
values of the variables that are undergoing the greater
changes are those of the non-shared variable. On top
of that, the noise coming from the Independent Vari-
able Agents is reduced thanks to the controls done by
the Variable Agents.
Another interesting point comes from the adaptive
feature of such a system. Indeed, several simulations
were run to solve the presented problems, and we can
observe that, given the few constraints on some vari-
ables, the system is able to find different balanced
states. During each time step, all the agents compos-
ing the CMAS can act, but due to the stochastic or-
der on which they behave, some delays may appear in
the messages transmission. Therefore, some modifi-
cations occur before some others, implying a different
dynamics. In those different cases, the CMAS is able
to converge toward a stable state respecting the con-
straints. This fact can model a kind of management
of noise coming from time delays, and highlights the
Table 2: “Interdependent” Equation Data.
Equations Variables
u = 0.3x+ 0.8y u, x, y
v = 0.2u + 0.4z v, u, z
x = 0.2v+ 0.3m x, v, m
0 500 1000 1500
−10
−5
0
5
10
15
−2
3
Simulation Step
Value
V = −2
U = 3
Figure 6: Results from the control of the interdependent
equations example.
robustness of the presented approach.
4.2.3 Controlling Interdependent Equations
The last example deals with the loops that appear in
the controlled system, a common phenomenon in the
equations used to describe bioprocesses. The results
available on Figure 6 are made up of 3 equations, de-
tailed in the Table 2, and possess 2 static objectives.
The Variable agent V has to reach the value −2 while
the Variable agent U aims toward 3.
This example underlines the message manage-
ment ability of the Variable Agents. Indeed, an agent
has to determine if a received request is still relevant.
Here, we can have requests that are making a full loop
and so, the agents must take this into account to avoid
a divergence of results, by summing unnecessary re-
quests.
Finally, it is noticeable that those three aspects,
which are the dynamic change of objectives, indepen-
dent variables and loops, presented here on separate
examples, are managed in the same way when they
are combined on the same equation system.
5 CONCLUSIONS &
PERSPECTIVES
This paper focuses on the control of real-time, dy-
namic and non-linear problems, and presents a first
step towards an adaptive control of bioprocesses. The
approach given uses an AMAS made up of different
types of generic cooperativeagents. The behavior and
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
36

abilities of these agents, as well as their relationships,
were detailed. An instantiation of this generic ap-
proach was applied to an equation solving problem
in order to prove the feasibility of this kind of control
on different kinds of equations. The results obtained
highlight the relevance of this approach, and its adapt-
ability to a wide range of problems, especially the
bioprocess control, a bioprocess being often modeled
thanks to equations systems.
Currently, the application of the proposed ap-
proach to a full bioprocess model, with a true bio-
logical meaning, modeling the bioreactor physics and
the evolution of microorganisms, is under develop-
ment. This application will enable evaluating the per-
formances of our control system, while validating its
scalability, such a model being composed of hundred
of equations.
On top of that, we are considering the time as-
pects, especially lags and delays coming from the
scale diversity on which reactions occur. The design
of a mechanism to manage those delays is in progress
with a twofold aim. The first one is to measure the im-
pact of different kinds of time constraints on the con-
vergence of the system towards its objectives and the
second one is to improvethe robustness of this system
while applied to strongly non-linear problems.
The final objective of this work is to combine this
control system with another AMAS which dynami-
cally models the bioprocess. Thus, the model needed
by the agents belonging to the control system will it-
self be composed of agents, reducing the work of in-
stantiation of the control agents. Therefore, the global
control system will be viewed as a Model Identifica-
tion Adaptive Control.
REFERENCES
Alford, J. S. (2006). Bioprocess control: Advances and
challenges. Computers & Chemical Engineering,
30:1464–1475.
Astrom, K. J. and Wittenmark, B. (1994). Adaptive Control.
Addison-Wesley Longman Publishing, Boston, MA,
USA.
Cohen, G. H. and Coon, G. A. (1953). Theoretical consider-
ation of retarded control. Journal of Dynamic Systems,
Measurement, and Control, pages 827–834.
Dunal, A., Rodriguez, J., Carrasco, E., Roca, E., and Lema,
J. (2002). Expert system for the on-line diagnosis of
anaerobic wastewater treatment plants. Water science
and technology, 45:195–200.
Feldbaum, A. (1960-1961). Dual control theory i-iv.
Automation Remote Control, 21,22:874–880, 1033–
1039, 1–12, 109–121.
Gleizes, M.-P., Camps, V., and Glize, P. (1999). A The-
ory of Emergent Computation based on Cooperative
Self-organization for Adaptive Artificial Systems. In
4th European Congress of Systems Science , Valencia
Spain.
H.P. Whitaker, J. Y. and Kezer, A. (1958). Design of model
reference adaptive control systems for aircraft. Tech-
nical Report R-164, MIT.
Kaufman, H., Bar-Kana, I., and Sobel, K. (1994). Direct
adaptive control algorithms: theory and applications.
Springer-Verlag, NY, USA.
Megan, L. and Cooper, D. J. (1992). Neural network
based adaptive control via temporal pattern recogni-
tion. The Canadian Journal of Chemical Engineering,
70:1208–1219.
Scott, G. M., Shavlik, J. W., and Ray, W. H. (1992). Re-
fining pid controllers using neural networks. Neural
Computation, 4(5):746–757.
Silva, R., Cruz, A., Hokka, C., and Giordano, R. (2000).
A hybrid feedforward neural network model for the
cephalosporin c production process. Brazilian Journal
of Chemical Engineering, 17:587–597.
Taylor, J. H. and Sayda, A. F. (2008). Prototype design
of a multi-agent system for integrated control and as-
set management of petroleum production facilities.
In Proc. American Control Conference, pages 4350–
4357.
Visioli, A. (2001). Tuning of pid controllers with fuzzy
logic. IEE Proceedings - Control Theory and Appli-
cations, 148(1):1–8.
Ziegler, J. G. and Nichols, N. B. (1942). Optimum settings
for automatic controllers. Transaction of the ASME,
64:759–768.
SELF-ADAPTIVE MULTI-AGENT SYSTEM FOR SELF-REGULATING REAL-TIME PROCESS - Preliminary Study
in Bioprocess Control
37
