
INTELLIGENT AGENTS FOR SEMANTIC SIMULATED REALITIES
The ISReal Platform
Stefan Nesbigall, Stefan Warwas, Patrick Kapahnke, Ren
´
e Schubotz
Matthias Klusch, Klaus Fischer and Philipp Slusallek
German Research Center for Artificial Intelligence, Stuhlsatzenhausweg 3, 66123 Saarbr
¨
ucken, Germany
Keywords:
Simulated reality, Multiagent system, Semantic web.
Abstract:
Realistic virtual worlds are increasingly used for training, decision making, entertainment, and many other
purposes, which require the convincing modeling and animation of virtual characters as well as the faithful
behavior of devices in their environment. Intelligent Simulated Realities (ISReal) is a platform for virtual
environments that are enriched with a high-level semantic description and populated by intelligent agents
using Semantic Web technologies to perceive, understand, and interact with their environment. In this paper,
we present the basic architecture of the ISReal platform and show the user interaction in an agent assisted
learning scenario.
1 INTRODUCTION
Steadily increasing computational power leverages
the use of more advanced techniques from artificial
intelligence, computer graphics, and areas that have
not been directly associated to virtual worlds, like Se-
mantic Web technology. The development of highly
realistic simulated realities is a non-trivial task and
a cross-discipline endeavour. Technological develop-
ment during the recent years mainly focused on the
graphical aspect. The behavior of avatars has often
been implemented with more or less powerful script-
ing engines. Instead, the intelligent agent paradigm
offers a clean, intuitive, and powerful way of mod-
eling the behavior of intelligent entities in virtual
worlds.
Intelligent agents are represented in real-time vir-
tual worlds through avatars (their virtual bodies) and
can interact with their environment through sensors
and actuators. Sensors cause perceptions that update
the agent’s beliefs. The agent can reason about its be-
liefs and plan its actions in order to achieve a given
goal. Virtual environments are especially demanding
since they are usually dynamic, non-deterministic. To
enable agents to interact with their environment a se-
mantic description of this environment is necessary.
3D computer graphic description languages (e.g.
X3D, COLLADA) are used in order to describe vir-
tual environments in so called scene graphs. These
languages specify the objects in the virtual environ-
ment by defining their shape, position, orientation, ap-
pearance, etc. The X3D/VRML
1
standard (ISO/IEC
19775) has become a unifying (at least conceptual)
base, but it lacks when it comes to the high-level de-
scriptions like they are required by intelligent agents.
Semantic annotations can be used to link the X3D ob-
jects to their semantic description given in a formal
semantic description language (e.g. OWL
2
). Further-
more, the functional behavior in the virtual environ-
ment can be specified as a semantic service by its in-
put, output, precondition, and effect (IOPE). The for-
mal specification of the virtual world enables the use
of Semantic Web technology (reasoning, matchmak-
ing, service composition planning, etc.).
In this paper we introduce the Intelligent Simu-
lated Reality (ISReal) platform, which can be used
to deploy semantically enabled virtual worlds that are
inhabited by intelligent agents. Intelligent agents per-
ceive the semantic annotations of geometric objects
and use, beside traditional BDI planning, Semantic
Web technology for reasoning and service composi-
tion. The platform is based on standards such as X3D
for the scene graph, OWL for semantics, and OWL-S
for service descriptions.
In the remainder of this paper we provide a de-
tailed overview of the ISReal platform. Section 2
presents the architecture of the whole platform with a
1
Web3D: http://www.web3d.org/x3d/specifications
2
W3C: http://www.w3.org/TR/owl-semantics/
72
Nesbigall S., Warwas S., Kapahnke P., Schubotz R., Klusch M., Fischer K. and Slusallek P. (2010).
INTELLIGENT AGENTS FOR SEMANTIC SIMULATED REALITIES - The ISReal Platform.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 72-79
DOI: 10.5220/0002730000720079
Copyright
c
SciTePress

focus on the architecture of the agents that can be de-
ployed. In Section 3 we use an agent assisted learning
scenario, in which an user has to operate a virtual ma-
chine, to demonstrate the interaction of the different
components. The user in this scenario can explore the
world and interact with agents, e.g. assign tasks like
”Open the door!” or ”Show me what to do in order
to get the machine running again.” Finally, Section 4
points out related work and Section 5 concludes the
paper.
2 ISREAL SYSTEM
ARCHITECTURE
The ISReal platform provides an open and extensi-
ble framework for real-time simulated realities. The
kind of scenarios that can be deployed cover a wide
range of applications such as demonstrators, decision
support systems, and virtual training environments.
For this purpose, the ISReal architecture has to meet
requirements such as (i) scalability in the size and
complexity of the simulated worlds, (ii) modularity
and exchangeability of the different simulation com-
ponents, (iii) extensibility (customizability) regarding
the supported domains and application scenarios, and
(iv) allow a highly realistic simulation of the world
regarding geometry, physical properties, and behav-
ior of the entities in a scene. To make our platform
as modular as possible, we base our work on stan-
dards where possible (e.g. OWL, X3D). One central
conceptual building block of our platform is the con-
cept of semantic objects which unifies the geometrical
shape, semantical properties, and functionality of ob-
jects in virtual worlds. The semantic properties are
defined with ontologies and the functionality of the
objects is described and implemented as semantic ser-
vices. Services play a key role in our platform. We
distinguish between object services which are offered
by semantic objects in the virtual world, and platform
services which are offered by the ISReal platform.
Figure 1: Top-level view of the ISReal architecture.
As depicted in Figure 1, the ISReal platform con-
sists of two core components. The Real-Time Scene
Graph Environment (RTSGE) manages (i) the geo-
metric representation of the objects in a 3D environ-
ment (scene graph), (ii) their semantic meta data, (iii)
their physical properties, and (iv) their animations.
The Global Semantic Environment (GlobalSE) main-
tains the global semantic high-level representation of
the scene and provides implementations of the seman-
tic services to interact with the RTSGE. The RTSGE
and the GlobalSE maintain what we call the Semantic
World Model. Based on these two core components
of the ISReal platform, we can connect further mod-
ules. The Agent Environment (AE) is responsible for
the realistic behavior of intelligent entities in the vir-
tual world. It provides the agents (i) with perceptions
from the RTSGE, (ii) a semantic knowledge base, (iii)
semantic reasoning, and (iv) enables them to invoke
object services. A further module is the user envi-
ronment (UE), which provides the interface for user
interactions. For example, the UE also covers the ren-
derer for the scene. In the remainder of this section
we provide a detailed overview of the different com-
ponents of the ISReal platform. We focus on the inter-
nal architecture of the agents that can be deployed on
the ISReal platform. For this purpose, we first intro-
duce in Section 2.1 the RTSGE and in Section 2.2 the
GlobalSE. Both components build the core of the IS-
Real platform and manage the semantic world model.
Section 2.3 is the main part and focuses on the agent
architecture. The UE is not covered in this section,
but we provide some more information in the exam-
ple in Section 3.
2.1 Real-time Scene Graph
Environment
The RTSGE maintains the geometrical representation
and offers an interface for external components to ma-
nipulate the virtual environment. We base the scene
graph on the X3D standard and use the X3D Scene
Access Interface
3
(SAI) standard as interface for ac-
cessing it. The pure geometric description is enriched
by semantic annotations, which is attached directly to
the geometric object it belongs to (through X3D meta-
data objects). The RTSGE communicates with a vari-
ety of different services, all of which have a semantic
description stored in the GlobalSE (see Section 2.2)
and operate directly on the scene graph through SAI.
Semantic objects are a central concept of the IS-
Real platform. Every semantic object is annotated by
(i) the URI that refers to the individual representing
a high-level description for this object, (ii) the URIs
that refer to the most specific concepts this 3D ob-
ject belongs to, (iii) the URIs to a set of semantic
services (object services), describing the useability of
3
Web3D: http://www.web3d.org/x3d/specifications
INTELLIGENT AGENTS FOR SEMANTIC SIMULATED REALITIES - The ISReal Platform
73
the object for a user or an agent. Beside the seman-
tic properties, a semantic object also encompasses (i)
geometric information, (ii) animations, and (iii) phys-
ical properties like the condition of its surface. These
properties are maintained by the RTSGE. Every ob-
ject interaction an user or agent can perform in the
3D environment is described as an object service in
OWL-S
4
. These services are described with IOPE and
enable the user or an agent to use Semantic Web tech-
nologies to retrieve, plan, or select interaction tasks.
The RTSGE has been realized by the Real-Time Scene
Graph (Rub09).
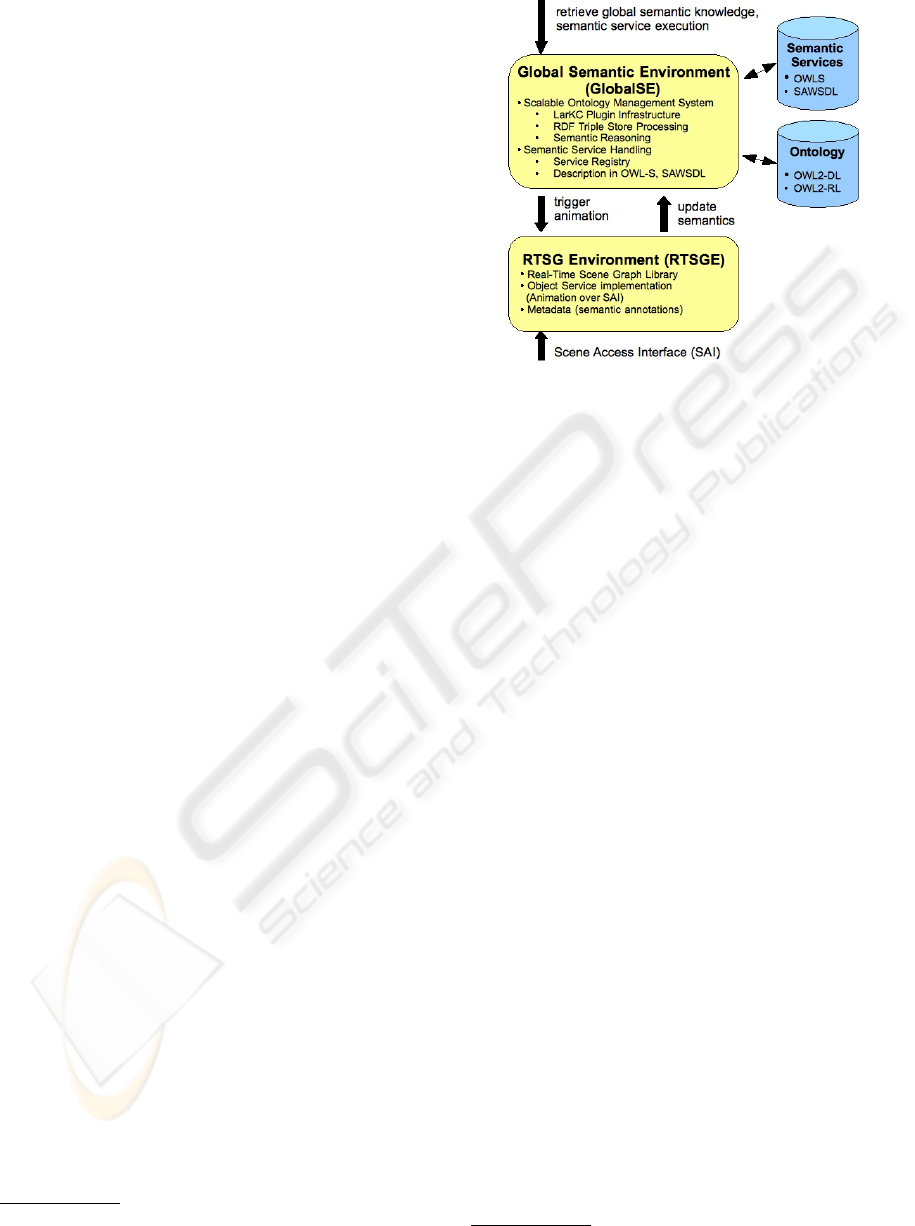
2.2 Global Semantic Environment
The GlobalSE maintains the high-level description of
the scene graph and the semantic services to interact
with the 3D environment. It consists of (i) an On-
tology Management System (OMS) to a) govern the
semantic description of the world, b) allow queries in
SPARQL
5
, a query language to primarily query RDF
graphs, and c) semantic reasoning, and (ii) a service
registry to maintain semantic services for the inter-
action with the objects in the 3D environment (object
services). With the initialization of the ISReal system,
we assume, that the high-level description specified
in OWL2-DL ontologies is consistent and accurate to
the low-level description specified in the X3D scene
graph. The GlobalSE provides an interface to main-
tain and query the OMS, register/add and read out ob-
ject services. Figure 2 depicts the core components of
the ISReal platform and their interfaces.
The OMS is initialized with OWL2-DL ontologies
(global knowledge base KB) that are internally stored.
It provides maintenance possibilities to add, update,
and remove statements from the internal store and if
the system shuts down write the store back into an
ontology file. To read out the store the OMS provides
following types of queries:
a) Object Reasoning. For queries about the con-
crete objects in the 3D environment, i.e. ABox knowl-
edge retrieval, SPARQL is used. For details we refer
to the SPARQL W3C recommendation.
b) Concept Reasoning. To answer questions
about the concepts (terminological knowledge) in the
3D environment T-Box reasoning is provided by the
OMS in form of a set of fixed methods to answer tasks
like global consistency (KB |= f alse?) or class con-
sistency (C ≡⊥?) checks.
c) Relational Reasoning. To find non-obvious re-
lations between different objects, i.e. a set of entities
{e
1
, . . . , e
n
}, the OMS can find the smallest tree of the
4
W3C: http://www.w3.org/Submission/OWL-S/
5
W3C: http://www.w3.org/TR/rdf-sparql-query
Figure 2: ISReal core components.
RDF graph representing the KB, such that it contains
all the entities {e
1
, . . . , e
n
} (Kas09). We provide an
example for this kind of query in Section 3.
The implementation uses the LarKC architecture
(Fen08). The OMS is implemented as a LarKC De-
cider consisting of different LarKC Reasoner plug-
ins. As processing plug-ins the OWLIM triple store
system (Kir05) and Pellet
6
are used.
2.3 Agent Environment
Intelligent behavior of entities in the ISReal platform
is modeled by agents. The agent architecture depends
mainly on (i) the properties of the virtual worlds that
can be deployed on the ISReal platform, and (ii) the
end-user requirements. According to environment
properties defined by (Rus03), the environments con-
sidered by the ISReal platform are (i) inaccessible, (ii)
non-deterministic, (iii) dynamic, and (iv) continuous.
The inaccessible property is caused by the fact that
an agent only perceives that part of the world which
is currently covered by its sensors. Moreover, non-
determinism and dynamism are owed to the fact that
there is usually more than one agent in the world and
the actions performed by these agents can interfere
with each other. Furthermore, the number of states
that can be reached is not finite, which causes the en-
vironment to be continuous. Finally, the agents are
acting in a real-time environment, meaning that they
have to react in a timely manner. These properties
have direct influence on the agent architecture. The
end-user of the virtual worlds deployed on the ISReal
platform has different possibilities to interact with the
6
http://clarkparsia.com/pellet
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
74

agents. He can ask the agent to perform a certain ac-
tion, assign some declarative goal to it, or can query
the agent’s local knowledge base.
The ISReal agent architecture is based on the
Belief, Desire, Intension (BDI) architecture (Rao95)
which is well suited for dynamic and real-time envi-
ronments. Figure 3 depicts an overview of the ISReal
agent architecture. We distinguish between the agent
core, which encompasses the core functionality pro-
vided by an agent execution platform, and the Local
Semantic Environment (LocalSE), which extends the
core with (i) an OWL-based KB (referred to as KB
a
),
(ii) a reasoner, and (iii) a Service Composition Plan-
ner (SCP). An agent directly controls its avatar (vir-
tual body of an agent) which is situated in the virtual
world. The interface of the agent to its virtual envi-
ronment is realized by sensors and actuators. Sensors
generate perceptions that contain information about
semantic objects. Actuators are realized as semantic
services that are offered by the agent itself or by the
semantic objects the agent can interact with. The per-
ception component is introduced in Section 2.3.1, the
information component in Section 2.3.2, and the be-
havior component in Section 2.3.3.
2.3.1 Perception Component
Sensors provide an agent with perceptions from its
current environment. The perceptions in the ISReal
platform are caused by the RTSGE which manages
the X3D-based scene graph. Since the X3D standard
does not specify the kind of sensor that is required by
ISReal agents, it is necessary to extend RTSGE with
the required functionality. Agents connected to the
ISReal platform perceive only semantic objects (see
Section 2.1). A perception event contains following
information: (i) the object’s ID in the scene graph,
(ii) the object’s individual URI, (iii), the object’s con-
cept URI, (iv) the URIs to the object services, and
(v) the URIs to the context rules assigned to the ob-
ject. The perception handling of the agent is done in
the following order: (i) receive the perception event
coming from the environment, (ii) use the individual
URI to get the corresponding ontological facts from
the GlobalSE, and (iii) add these facts to the KB
a
of
the agent’s LocalSE (see Figure 3). Additionally, add
the URIs of the object services to the respective lists
S
a
in the LocalSE.
2.3.2 Information Component
To enable agents to process OWL-based information
we extended the agent core with the LocalSE. Equiva-
lent to the GlobalSE the LocalSE consists of an OMS
that can be queried in the same three ways. Initializ-
ing an agent (and with it its LocalSE) the LocalSE has
only a partial description of the world representing the
knowledge KB
a
the agent has in this scenario. The
main difficulty is to integrate the LocalSE in a trans-
parent way, so that the agent’s internal mechanisms
do not break. The information component provides
a transparent layer between the agent and its KB
a
. It
provides functionality for (i) updating and inserting
facts into the KB
a
, and (ii) reasoning about informa-
tion in the KB
a
. This functionality is used by the be-
havior component to access the KB
a
. For example,
we use SPARQL queries in the context condition of
BDI plans.
2.3.3 Behavior Component
Classical first-principles planning starts from a given
world state and tries to reach an also given goal state
by the application of a set of operators. The whole
planning process is done off-line, meaning no changes
are incorporated during the planning process. BDI-
based planners rely on a plan library that provides the
agent with plan templates that guide its execution in
certain situations (usually defined by relevance con-
ditions and context condition). Because of the plan
library, BDI systems are more efficient than classical
planners. Their drawback is that they fail as soon as
no plan is applicable in the current situations, even if
there exists a combination of their plans that achieves
a given goal. A further difference is that BDI agents
directly execute the actions of a chosen plan tem-
plate and incorporate incoming events, while classical
planners finish the complete planning process before
the plan can be executed. One important distinction
is the difference between declarative goals (state de-
scriptions) like they are used in traditional planning
problems and procedural goals (goal events) of BDI
systems that are used to trigger actions (Win02).
The ISReal agent architecture combines the effi-
ciency of BDI-planners and the flexibility of classi-
cal planners. An agent’s core functionality is imple-
mented as BDI plans and (goal) events. We consider
two situations in which a BDI agent benefits from the
invocation of a classical planner. The first case occurs
when there is no applicable plan in the agent’s plan li-
brary for the current situation. The agent invokes the
classical planner to explore new plans that have not
been defined at design-time. The second case occurs
when the user assigns a declarative goal to the agent
to reach a certain state. The agent can pass this goal to
its SCP and gets back a plan consisting of a sequence
of services. The agent can either map these services
to existing BDI plans or invoke the corresponding ob-
ject services directly.
INTELLIGENT AGENTS FOR SEMANTIC SIMULATED REALITIES - The ISReal Platform
75
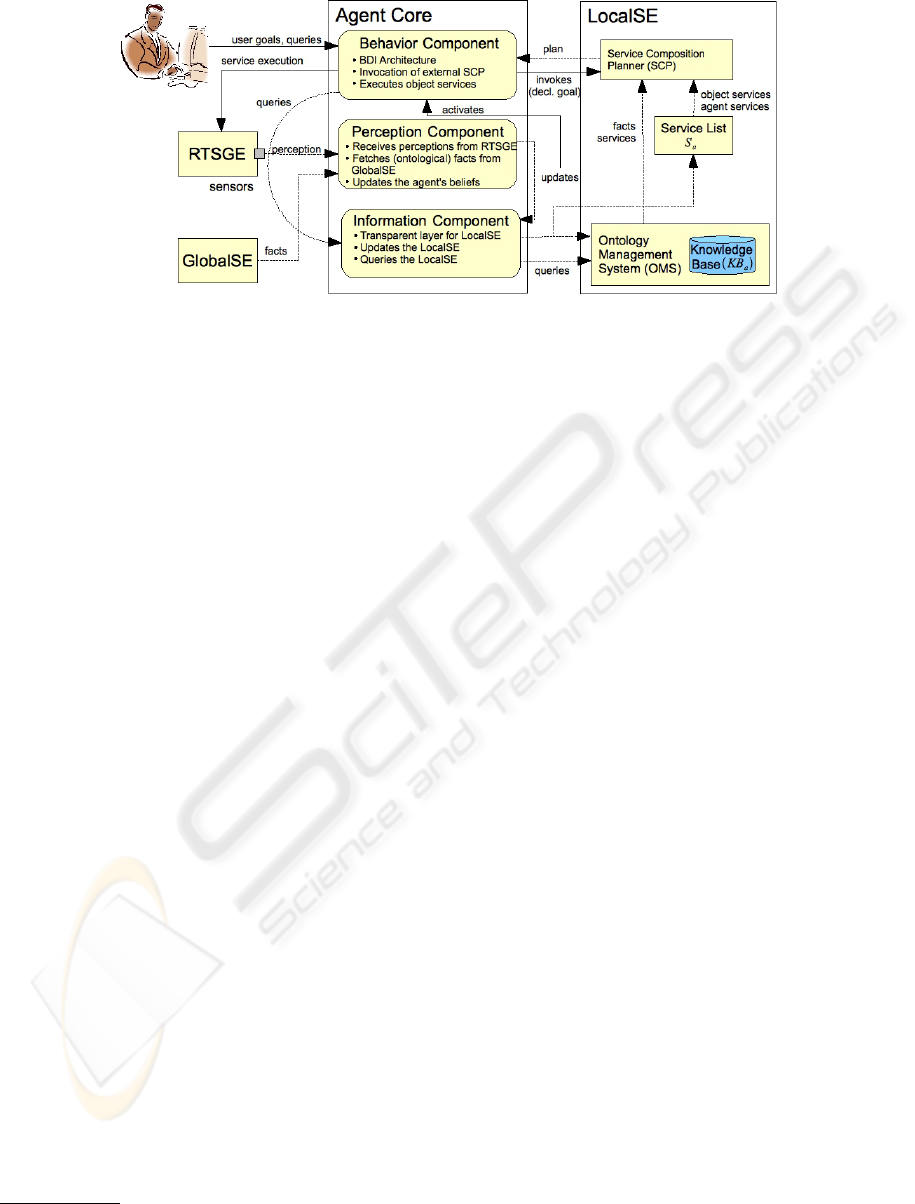
Figure 3: ISReal agent architecture.
Of course, the external planner requires a repre-
sentation of the BDI plans and (declarative) goals in
order to explore new solutions. In ISReal, we there-
fore specify declarative goals g
d
for every goal event
e
g
in the BDI planner describing the facts an agent
wants to achieve when e
g
triggers. Furthermore, ev-
ery BDI plan is described as a semantic service and
stored in the service list S
a
of his LocalSE (see Fig-
ure 3). Whenever a goal event g
e
triggers and no BDI
plan is applicable, the agent invokes the SCP of his
LocalSE. The SCP gets (i) the knowledge base KB
a
as first, (ii) the declarative goal g
d
of the agent trans-
formed to an OWL2-DL ontology as second ontol-
ogy, and (iii) all known object services S
a
as input.
As output the SCP returns a sequence of operations
(the plan) and a binding that maps the parameters of
each operation to facts in the knowledge base. Us-
ing this binding, the agent can execute the services.
If the SCP fails to find a plan, then the agent fails to
achieve the goal. If the SCP finds a plan, the agent
has to execute the operations of that plan. For this
purpose, the agent checks for all operations o in the
plan whether o is (i) a core service implemented by
the agent itself or (ii) an object service that is pro-
vided by some object. In the case of a core service, the
agent maps the service to a BDI plan and executes the
applicable plan. In the case of an object service, the
agent fetches the grounding information and invokes
the appropriate implementation. Using this combined
planning approach the agent is able to find new solu-
tions that are not directly encoded in its plan library.
As agent systems we use Jack
7
and Jadex
8
. The SCP
has been realized with OWLS-XPlan 2.0, a Seman-
tic Web service composition planner for OWL-S 1.1
services (Klu05).
7
http://www.agent-software.com/index.html
8
http://jadex.informatik.uni-hamburg.de
3 EXAMPLE SCENARIO
In the following, we show how the ISReal platform
can be used. As introduced in Section 2.2, the user
can query the GlobalSE and agents in the virtual
world with queries a) for object reasoning (e.g. ”What
is this object?”), b) concept reasoning (e.g. ”Are these
two objects equivalent?”), c) relational reasoning (e.g.
”What is the relation between the red lamp and the
machine?”). Furthermore, the user can execute the
functionality of the scene (semantic objects), trigger
basic actions of the agent, or formulate a goal (e.g.
”Show me what to do in order to get the machine run-
ning again.”, ”Open the door!”) that the agent should
achieve.
The scenario considers a new employee whose
task is to learn how to use a machine called Smart
Factory assisted by the ISReal platform. The Smart
Factory fills pills into cups that are on a transporta-
tion belt (see Figure 4). The virtual Smart Factory is a
simulation of a physical real-world model that is used
for demonstrations. In the following the user interacts
directly with the machine to turn it on (Section 3.1).
After an error occured he asks the agent for more in-
formation about the machine (Section 3.2) and finally
let the agent show him how to resolve the error (Sec-
tion 3.3).
In this simple scenario that we use for demon-
stration purposes, the user can explore a virtual work
room, containing the Smart Factory and a virtual as-
sistant controlled by an agent. Please note that the
transformation from and to natural language is not in
the scope of this paper. Therefore, we use only sim-
ple template-based transformations. Furthermore, we
assume that the user only queries the agent who is
familiar with the Smart Factory and therefore has an
updated local knowledge base that contains all neces-
sary facts.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
76
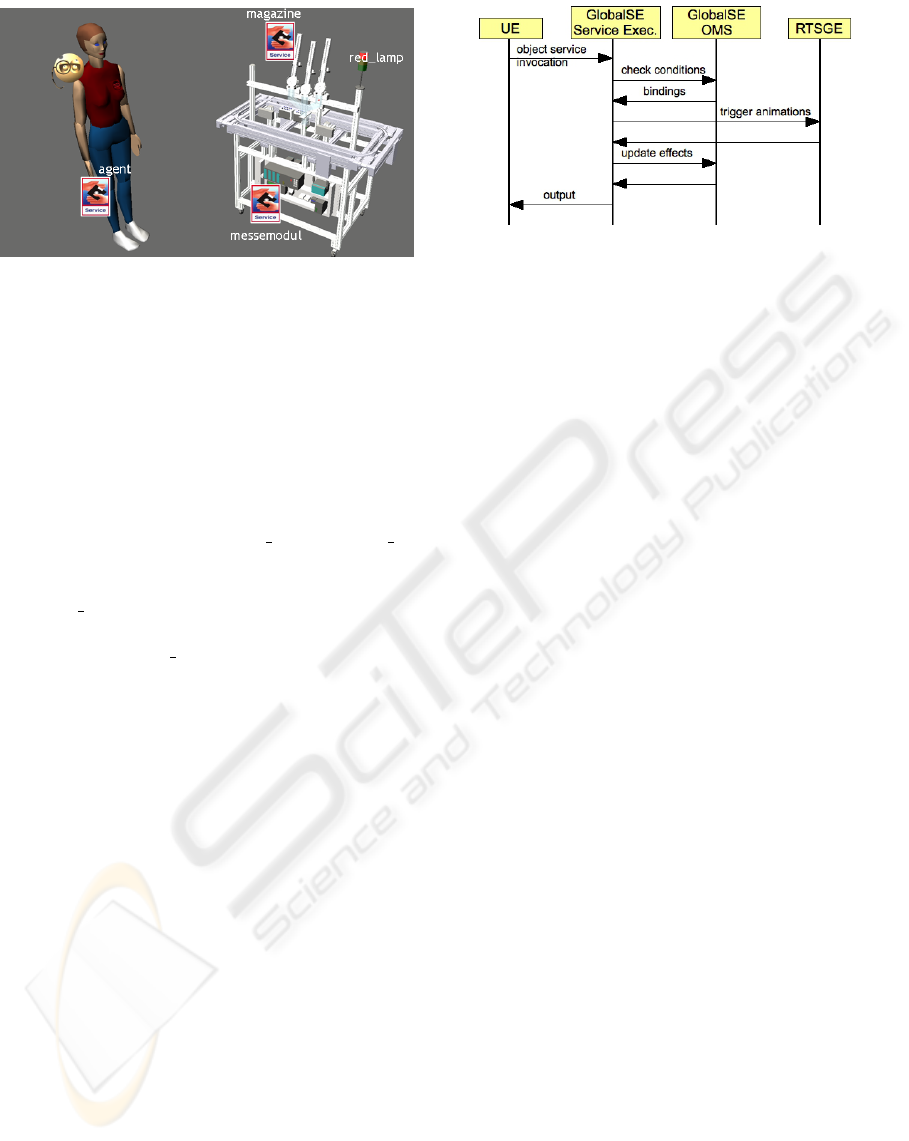
Figure 4: The Smart Factory use-case.
3.1 Semantic Object Interaction
The user starts exploring the virtual work room as an
interactive immersive environment. He recognizes a
control panel at the Smart Factory. The user’s in-
tention is to put the Smart Factory into operation by
pressing the button on the control panel. Via the UE
he can interact with the Smart Factory (as a 3D ob-
ject) and get all object services the Smart Factory pro-
vides. These services are switch on and switch off.
They are triggered through pressing appropriately la-
beled 3D buttons on the machine. The user chooses
the switch on services and invokes it. Figure 5 de-
picts a sequence diagram of the whole object service
execution. The switch on service expects as input pa-
rameter an instance of Machine (?sel f ). Since ?sel f
is the instance of the semantic object that provides this
service, the parameter is derived automatically. The
precondition is defined as follows: Machine(?self) ∧
pluggedIn(?sel f , ?x) ∧ PowerSupply(?x). The effect
consists of two conditional effects, (a) one for a failed
checkup leading to an error state (represented by an
active red lamp) and (b) one for a successful checkup
leading to the operation state (represented by an active
green lamp). (a) is defined as: consistsOf(?sel f , ?y)
∧ Magazine(?y) ∧ Empty(?y) ∧ triggers(?y, ?z) ∧
RedLamp(?z), having the effect Active( ?sel f ), Ac-
tive(?z). (b) is defined as: consistsOf(?sel f , ?y) ∧
Magazine(?y) ∧ Full(?y) ∧ triggers(?y, ?z) ∧ Gre-
enLamp(?z), having the effect Active(?sel f ), Ac-
tive(?z). Let’s assume the Smart Factory is pro-
vided with a power supply but the magazine is empty
(which is a fact the user cannot see). After the
user turned on the machine the variable binding af-
ter checking the conditions is, e.g. (?sel f , smart-
f actory01), (?x, powerSocket01), (?y, magazine02),
(?z, redLamp01). Based on these bindings, the facts
Active(smart f actory01), Active(redLamp01) are de-
rived. The appropriate animations are triggered
(given by the grounding information of the service
that uses endpoints provided by the RTSGE) and the
Figure 5: Sequence diagram for object service execution.
effect is written to the GlobalSE.
3.2 Information Request
Using the ISReal platform the user was able to put
the Smart Factory into operation but the machine is
in an obvious error state (the signal lamp switches to
red). To figure out the problem the user gives follow-
ing query to the agent assistant: ”What is the rela-
tion between the red lamp and the Smart Factory?”
The agent transforms the natural language query into
a list of entities and passes it to its LocalSE. The
LocalSE handles the query as a relational query (cf.
type c) in Section 2.2. By computing the Steiner
tree between the entities (’redLamp01’, ’smartfac-
tory01’) a graph holding the answer is computed:
”The magazine is a part of the Smart Factory that
triggers the red lamp.” This answer is produced from
the tree given by: consistOf(smartfactory01, maga-
zine02), triggers(magazine02, redLamp01). In order
to get more information about the magazine, the user
sends a second query to the agent: ”What can you
tell me about this magazine?” After the agent trans-
formed the question into a simple SPARQL query, the
query is passed to the agent’s LocalSE. As result, the
agent returns a set of statements that can be summa-
rized in natural language: ”The name of this object
is magazine02. It is a Magazine and Empty. It is
part of the smartfactory01 and triggers redLamp01
and greenLamp01.”
3.3 Goal Assignment
After the user gathered information about the rela-
tion of the lamps and the machine, he wants to put
the machine in its running state (active green light)
and asks the agent: ”Show me what to do in order
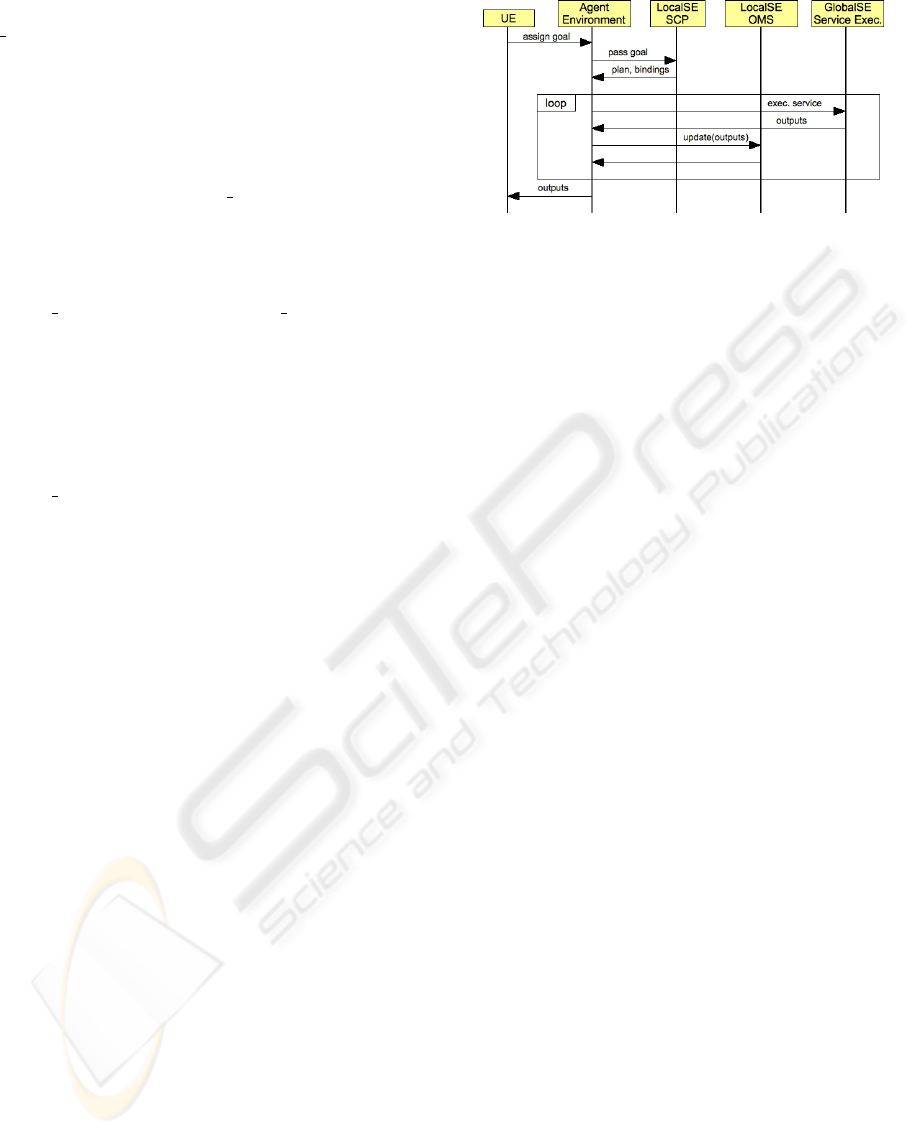
to get the machine running again.” The agent pro-
cesses the query and handles it as a planning task.
Figure 6 shows how the agent processes the query.
The user’s query is transformed to a declarative goal
description: Active(smart f actory01) ∧ Active(green-
INTELLIGENT AGENTS FOR SEMANTIC SIMULATED REALITIES - The ISReal Platform
77
Lamp01). We already introduced the service switch-
on above. Additionally the agent knows an ob-
ject service refill of the magazine. This service has
the precondition Magazine(?sel f ) ∧ Empty(?sel f ) ∧
isPartOf(?sel f , ?x) ∧ Machine(?x) ∧ InActive(?x) and
the non-conditional effect Full(?sel f ). Please note,
that in this example (for the sake of simplicity) we
neglect the pills that are actually filled into the mag-
azine. The service switch off checks whether the
machine (?sel f ) is Active(?sel f ) and sets it to In-
Active(?sel f ).
Using the SCP the agent determines that it
has to use the three services in the sequence: (i)
switch off, (ii) refill, (iii) switch on with the ac-
cording variable bindings for the input parameters
(i) (?sel f , smart f actory01), (ii) (?sel f , magazine02),
(iii) (?sel f , smart f actory01) in order to achive his
goal. The first service sets the Smart Factory to in-
active, which is necessary to fulfill the precondition
of the service refill. Then the second service can be
used to trigger the conditional effect (b) at the service
switch on that leads to a state where the goal descrip-
tion is fulfilled (see above). Invoking the plan for ev-
ery service (cf. loop in Figure 6), the agent either calls
the service execution of the GlobalSE, in case of an
object service, or triggers the corresponding BDI plan
in case of a service describing such a BDI plan. The
outputs are used to update the LocalSE of the agent
and returned to the user. As visible effect, the agent
walks to the machine, unmounts the pill magazine, re-
fills it, mounts it again, and switches the machine back
on. In their plans the agents can make use of other ser-
vices (not discussed here) for navigating and moving
in their environment, perform animated actions (like
switching a switch on, turning a knob), and the en-
vironment will have physical properties and behavior
using a physics engine.
4 RELATED WORK
The central idea of the ISReal platform is to use Se-
mantic Web technology to semantically enrich the
pure geometric data of the scene to enable intelligent
agents to interact with their environment. However,
in a different context semantic annotation of 3D en-
vironments has been previously discussed, e.g. in
(Pit06), (Bil05), and (Kle07). Kalman et al. (Kal01)
proposed the concept of smart objects which is a geo-
metrical object enriched with meta information about
how to interact with it (e.g. grasp points). Abaci et
al. (Aba05) extended smart objects with PDDL data
in order to plan with them. Lewis et al. (Lew02)
motivates the use of computer game engines in sci-
Figure 6: Sequence diagram for goal assignment.
entific research. For example, (Ork04) presents archi-
tectural considerations for real-time agents that have
been used in the computer game F.E.A.R.. (Dav06)
presents an approach how to connect a BDI agent
system to the Unreal engine. (Pan99), (Vos99), and
(Ana01) present a multi-agent system for general-
purpose intelligent virtual environment applications
that consists of three types of conceptually discrete
components: worlds, agents, and viewers. (Vos01)
presents SimHuman consisting of two basic modules:
a 3D visualization engine and an embedded physi-
cally based modeling engine. Agents can use fea-
tures such as path finding, inverse kinematics, and
planning to achieve their goals. (Hua02) proposes an
approach to 3D agent-based virtual communities in
which autonomous agents are participants in VRML-
based virtual worlds using the VRML External Au-
thoring Interface (EAI). The distributed logic pro-
gramming language DLP has been extended to sup-
port 3D agent-based virtual communities. However,
what makes ISReal significantly differ from all ex-
isting systems is its integration of virtual worlds, Se-
mantic Web and agent technology into one coherent
platform for semantically-enabled agent-assisted 3D
simulation of realities.
5 CONCLUSIONS
Semantically enabled simulated realities as consid-
ered by this paper have a great potential for commer-
cial applications. Highly realistic prototypes of build-
ings, production lines, etc. support companies in the
early decision making process and help to avoid ex-
pensive error corrections. The possibility of training
employees on virtual production lines, long before the
actual plant has been built, saves time and money.
The realization of a platform for deploying seman-
tically enabled simulated realities is a cross-discipline
endeavor and requires input from various research ar-
eas such as computer graphics for realistic anima-
tions and rendering of a scene, artificial intelligence
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
78

for convincing behavior of the entities, and Seman-
tic Web for adding meaning to the purely geomet-
rical objects and describing their functionality. Be-
side the conceptual integration, requirements such as
modularity, scalability, and extensibility are the main
drivers for the architecture of the ISReal platform.
In this paper we discussed the basic architecture
of the ISReal platform. Key aspects of the future
work are on the scalability of core techniques in terms
of scene complexity, semantic expressiveness, natural
animations, real time performance, and use of many-
core hardware.
REFERENCES
Abaci, T., et al.: Planning with Smart Objects. WSCG
SHORT papers proceedings, UNION Agency - Sci-
ence Press, pp. 25-28, 2005.
Anastassakis, G., et al.: Multi-agent Systems as Intelli-
gent Virtual Environments. Lecture Notes in Com-
puter Science, Vol.: 2174/2001, pp. 381-395, 2001.
Bilasco, I., et al.: On Indexing of 3D Scenes Using MPEG-
7. Proc. 13th. annual ACM Intl. Conf. on Multimedia,
ACM Press, pp. 471-474, 2005.
Davies, N.P., et al.: BDI for Intelligent Agents in Com-
puter Games. textitProc. of 8th Intl. Conf. on Com-
puter Games: AI and Mobile Systems (CGAMES’06),
University of Wolverhampton, 2006.
Fensel, D., et al.: Towards LarKC: a Platform for Web-scale
Reasoning, IEEE Computer Society, Press Los Alami-
tos, 2008.
Ghallab, M., et al.: Automated Planning, Theory and Prac-
tice. Morgan Kaufmann Publishers Inc., 2004.
Huang, Z., et al.: 3D Agent-based Virtual Communities.
Proc. of the 7th Intl. Conf. on 3D Web technology., pp.
137-143, ACM, 2002.
Kasneci, G., et al.: STAR: Steiner Tree Approximation in
Relationship-Graphs. Proc. of 25th IEEE Intl. Conf.
on Data Engineering (ICDE), 2009.
Kallmann, M.: Object Interaction in Real-Time Virtual En-
vironments. PhD thesis,
´
Ecole Polytechnique F
´
ed
´
erale
de Lausanne, 2001.
Kiryakov, A., et al.: OWLIM - a Pragmatic Semantic
Repository for OWL. WISE Workshops, pp. 182-192,
2005.
Klusch, M., et al.: Semantic Web Service Composition
Planning with OWLS-Xplan. 1st Intl. AAAI Fall Sym-
posium on Agents and the Semantic Web, 2005.
Kleinermann, F., et al.: Adding Semantic Annotations,
Navigation Paths and Tour Guides for Existing Virtual
Environments. Proc. of the 13th Intl. Conf. on Virtual
Systems and Multimedia, pp. 50-62, Eds., Springer-
Verlag, 2007.
Lewis, M., et al.: Game Engines in Scientific Research.
Communcation of the ACM. Vol. 45, No. 1, pp. 27-31,
ACM, 2002.
Orkin, J.: Agent Architecture Considerations for Real-Time
Planning in Games. Proc. of the Artificial Intelligence
and Interactive Digital Entertainment Conf. (AIIDE),
AAAI, 2005.
Panayiotopoulos, T., et al.: An Intelligent Agent Frame-
work in VRML worlds. Advances in Intelligent Sys-
tems: Concepts, Tools and Applications., pp. 33-43,
1999.
Pittarello, F., et al.: Semantic Description of 3D Environ-
ments: A Proposal Based on Web Standarts. Proc. of
Intl. Web3D Conf., ACM Press, 2006.
Rao, S., et al.: BDI Agents: From Theory to Practice. Proc.
of the 1st Intl. Conf. on Multi-Agent Systems, pp. 312-
319, AAAI Press, 1995.
Rubinstein, D., et al.: RTSG: Ray Tracing for X3D via a
Flexible Rendering Framework. Proc. of the 14th Intl.
Conf. on 3D Web Technology (Web3D Symposium ’09)
(to appear), 2009.
Russell, S., et al.: Artificial Intelligence: A Modern Ap-
proach. 2nd edition. Prentice-Hall, Englewood Cliffs,
2007.
Vosinakis, S., et al.: DIVA: Distributed Intelligent Virtual
Agents. University of Salford., pp. 131-134, 1999.
Vosinakis, S., et al.: SimHuman: A platform for real-
time virtual agents with planning capabilities. Lecture
Notes in Computer Science, Vol.: 2190/2001, pp. 210-
223, 2001.
Winikoff, M., et al.: Declarative Procedural Goals in Intel-
ligent Agent Systems. Proc. of the 8th Intl. Conf. on
Principles of Knowledge Representation and Reason-
ing (KR2002), pp. 470-481, 2002.
INTELLIGENT AGENTS FOR SEMANTIC SIMULATED REALITIES - The ISReal Platform
79
