
ROSE – AN INTELLIGENT MOBILE ASSISTANT
Discovering Preferred Events and Finding Comfortable Transportation Links
Bjørn Zenker and Bernd Ludwig
Friedrich-Alexander-University Erlangen-Nrnberg
Haberstrasse 2, 91058 Erlangen, Germany
Keywords:
Mobile navigation system, Route planning.
Abstract:
In this paper, we describe ROSE (Routing Service), an application for mobile phones, which suggests the user
events and locations and guides him to them, using the public transport system. It determines the best possible
transport link and accompanies passengers throughout their entire journey. Further, it reacts in real time to
delays in the public transport system and calculates alternative routes when necessary. For route planning in
this context, we will propose a h
ε
u-optimal algorithm for incorporating non-monotone multi dimensional user
preferences. The algorithm is based on an analysis of theoretical foundations for real world route planning
problems and leads to a new approach of how recommendation and route generation subsystems should be
coupled to increase user satisfaction.
1 INTRODUCTION
State-of-the-art navigation systems provide point-to-
point navigation for their users: given a starting point
and an ordered list of destinations, the navigation
system computes a shortest path between subsequent
points and guides the users from one point to the next
in the list. A major drawback of this type of assis-
tance is that the user has to know where he wants to
go to. Often however, this is not the case. For exam-
ple, tourists in unfamiliar cities cannot apply a navi-
gation system successfully until they have looked up
the places available to visit, i.e. a famous castle. Even
city residents often do not know where to go in order
to spend their leisure time or to settle a private or pro-
fessional matter.
In on-the-move situations without having the
usual sources of information at hand, this is not prac-
tical. To ease the whole process of planning, we
are developing ROSE: it combines recommendation
of events and locations with navigation. While the
provided services can be easily accessed from nearly
every mobile phone, the ROSE server incorporates
and preprocesses data from different web sources, like
live public transport data, event and location directo-
ries and map services.
In many situations, users need to get to more than
a single location. From a theoretical point of view,
this results in a traveling salesman problem. In con-
trast to transport companies, pedestrians are much
more flexible in planning their tour: They do not have
fixed time tables, so the problem of satisfying many
constraints can be relaxed: the ordering of visiting the
locations is arbitrary, so tour plans may be changed at
travel time. Often, even the location is not fixed be-
cause users want to satisfy “tasks” (like buying printer
paper or getting something to eat) without having a
certain shop in mind. This allows tour plans to be
rearranged interactively: at any time, the system can
propose a near-by shop for printer paper and settle one
item in the total list of matters.
In this paper, we present an iterative algorithm
that approximates graph theoretical optmization prob-
lems of tour planning by applying the relaxations just
described. Before discussing the algorithm, the pa-
per presents the ROSE system and its current state of
implementation comparing it to other state-of-the-art
systems. Next, we discuss differences between op-
tizimation criteria that are user adaptive and admissi-
ble heuristics that are used regularly for finding opti-
mal solutions in graphs. We give an account of the
underlying hierarchy of graph-theoretical problems
and outline how the idea of relaxing the optimization
might help in developing tractable algorithms. We
explain our implementation of optimzing user adap-
tive criteria as a multi-attribute decision problem and
present examples encoded in our programming lan-
guage MADL for multi-attribute optimizations.
365
Zenker B. and Ludwig B. (2010).
ROSE – AN INTELLIGENT MOBILE ASSISTANT - Discover ing Preferred Events and Finding Comfortable Transportation Links.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 365-370
DOI: 10.5220/0002735603650370
Copyright
c
SciTePress
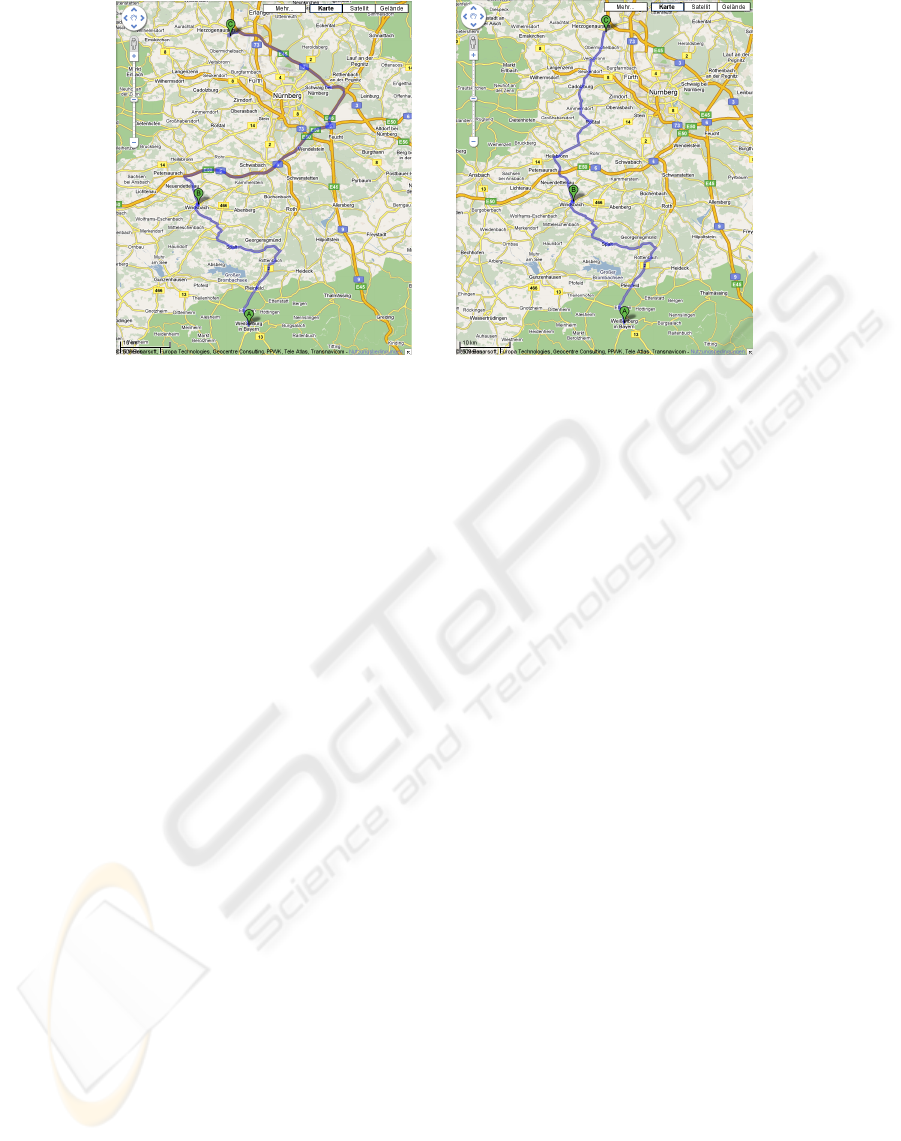
Figure 1: Two routes computed by Google Maps: On the left Google’s best recommendation; on the right Google’s second
best recommendation.
2 RELATED WORK
In this section, we argue that the issues of user adap-
tive heuristics for planning in assistance systems and
combination of services from a user-oriented perspec-
tive have not been considered extensively enough in
research on intelligent assistance systems.
2.1 The Need for User Preferences in
Search
Multi-attribute optimization is a well established area
of research. However, as efficient search algorithms
need admissible optimization function for heuristic
evaluation of partial solutions in order to efficient
prune the search space, weighted sums are the pre-
ferred type of heuristics. They provide a clear ad-
vantage: as they are a mapping from a set of influ-
ence factors to the real numbers, a set of options the
search algorithm has to decide between can always be
ordered totally whereas multi-attribute decisions just
compute a pareto-optimal solution. In general, it con-
tains more than a single element. Therefore it remains
unclear which decision is the best for optimal pruning.
On the other hand however, weighted sums suffer
from a important disadvantage: they are bad at ex-
plaining their decisions and – even worse – at allow-
ing the user to take influence on a decision. To illus-
trate this point, let us look at an example taken from
the Google map server (http://maps.google.de):
we are asking for a route (using a car) from be-
tween the three German cities Weienburg, Winds-
bach, and Herzogenaurach. The route considered best
by Google can be seen on the left map in Fig. 1. It is
123 km long and takes one hour and 42 minutes for
a normal car. The second best recommendation is the
map on the right side in Fig. 1. It is 90 km long and
takes one hour and 45 minutes: the advantage of 3
minutes is reached at the cost of 33 km! This exam-
ple is a case for multi-attribute decisions which allow
the user to state explicitly what his preferences are.
Depending on the driver, highways may be preferred
(taking long distances into account) or not (preferring
to save fuel or just disliking the high speed on German
highways). Generalizing this example, in Sect. 4 we
present an algorithm that incorporates user-adaptive
preferences into heuristics for pruning search spaces.
2.2 Comparison to Similiar Systems
ROSE’s application domain is also treated by other
researchers. Similiar aproaches for recommenda-
tion and navigation systems have been implemented
in COMPASS (van Setten et al., 2004) and Magitti
(Bellotti, 2008). They employ different prediction
strategies in recommendation and rate the yielded re-
sults based on user preferences. P-TOUR (Maruyama
et al., 2004) uses a genetic algorithm to find dif-
ferent near-best solutions and presents them to the
user in a k-means clustered overview, from which he
can select his preferred route. RouteCheckr (Voelkel
and Weber, 2008) employs a multi-criteria Dijkstra
based algorithm, which remains limited to the usage
of the weighted sum. As it does not use an estima-
tion function, it does not have to cope with nonmono-
tone and optimal criteria, but is presumably slower
than an algorithm using such a heuristic. Hochmair
(Hochmair, 2004) studies, which decision rules bicy-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
366

clists utilize in route planning and discusses different
decision rules. He concludes that a compensatory de-
cision rule should be used, but he does not implement
this concept in a new algorithm. These systems do not
support public transport.
In contrast, PECITAS (Tumas and Ricci, 2009)
is a mobile personalisable navigation system, which
advices routes using means of public transportation.
However, it does not include recommendation of
events or locations and routes are restricted to one
starting point and one destination point only. For user
adaptation, PECITAS generates multiple routes by us-
ing different heuristics (e.g. fastest route, or not tak-
ing any bus) and ranks them according to user prefer-
ences (walking preferences, number of bus changes,
arrival at destination, sightseeing).
Compared to these systems, the unique features of
ROSE are:
• routing to multiple destinations,
• integration of recommendation, route generation
with live public transport
• support and navigation
• usage of various compensatory decision rules.
3 OVERVIEW OF THE ROSE
SYSTEM
In this section, we present a short overview of the cur-
rent implementation of ROSE and its client-server ar-
chitecture. In a sample session we demonstrate how
ROSE is used in practice.
3.1 Pedestrian Navigation, Event
Recommendation, and Live Public
Transport Routing – All in One
To get a recommendation, the user enters a query, like
’modern opera’, into his mobile phone (see 2, left).
The recommender then generates a list of suggestions
based on the user input and the user’s preferences. In
this example it would likely be a list of events which
feature music similar to the users preference (see 2,
right). After the user has chosen one of the presented
options, the system calculates a route from the cur-
rent location to the selected goal. Figure (see 3, right)
shows a route overview from the users current point
to his choosen destination. To consider user prefer-
ences in route generation, we propose a h
ε
u-optimal
algorithm in section 4.
To ease the travelling, public transportation is also
considered. The system calculates a route from the
user’s current position to the nearest public transport
option, which means of transportation to take, where
to change transportation and how to walk from the
last stop to the goal location. Departure times are dis-
played to the user and he is informed, i.e. if he has to
hurry to catch a bus.
3.2 System Architecture
The ROSE system consists of a server, which calcu-
lates recommendations and routes and a client which
is used for user input, display of results and naviga-
tion. More details can be found in (Ludwig et al.,
2009).
3.3 The Core Issue: User Adaptive
Optimization
We structured the system into three main services:
recommendation, route generation and navigation. In
the current release of the system, all services are cou-
pled loosely: the results of the recommendation are
the input (goals) of the route generation. The result of
the route generation is the input (way) of the naviga-
tion service. Such a loose combination suffers from a
number of drawbacks:
• It does not provide for replanning when some un-
foreseen event (e.g. missing a bus, the printer pa-
per shop being closed exceptionally) happens.
• The algorithm is challenged by a huge search
space: the fact that busses travel according to
time tables results in a search graph with a quite
tremendous number of edges.
• In most cases, there are many locations meeting
the user’s preferences. For example, many restau-
rants sell good pizza. As a consequence, even the
problem an optimal solution is searched for is not
defined uniquely.
• Finally, the selected locations may be far away
from each other, allowing for many degrees of
freedom in ordering them to form a tour.
Our conclusion from all these issues is that a close
coupling of recommendation is needed which inter-
leaves route generation and navigation. This results
in a complex graph theoretical optimization problem
like the Multi Path Orienteering Problem with Time
Windows (MPOPTW) (Garcia et al., 2009). (Ludwig
et al., 2009) presents an hierarchical overview (com-
pare Figure 4.) of different problem classes in the
routing context.
Additionally, the impact of close and loose cou-
pling of the recommendation and route finding ser-
vices on the user satisfaction shall be researched. As
ROSE - AN INTELLIGENT MOBILE ASSISTANT - Discovering Preferred Events and Finding Comfortable
Transportation Links
367

Figure 2: left: Query, right: List of recommendations.
Figure 3: left: Details of recommendation, right: Route overview.
we presume that the algorithmic complexity of close
coupling is too big and that loose coupling is not sat-
isfactory, we want to investigate, how an intermediate
coupling between these the extremes could be real-
ized.
4 ALGORITHMS FOR
COMFORTABLE ROUTES
Criteria for evaluating the quality of a route are lim-
ited mostly by formal constraints dictated by the al-
gorithm used to find optimal paths. Efficient greedy
graph search algorithms require the heuristic function
to be monotone; A* even requires the heuristics to be
optimistic, i.e. to never overestimate real costs of a
path. In practice however, such constraints for heuris-
tics are not adequate to reason about user preferences.
In a survey conducted at our computer science insti-
tute among public transport users, the following crite-
ria were marked as important by the test candidates:
• No long waiting time until departure
• Short duration of the trip
• Short foot walks
• Few changes of transportation
• No long waiting time during changes
Optimistic estimates for these criteria are just the
function f (x) = 0; this amounts to omitting the crite-
rion completely, which is an undesired consequence.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
368
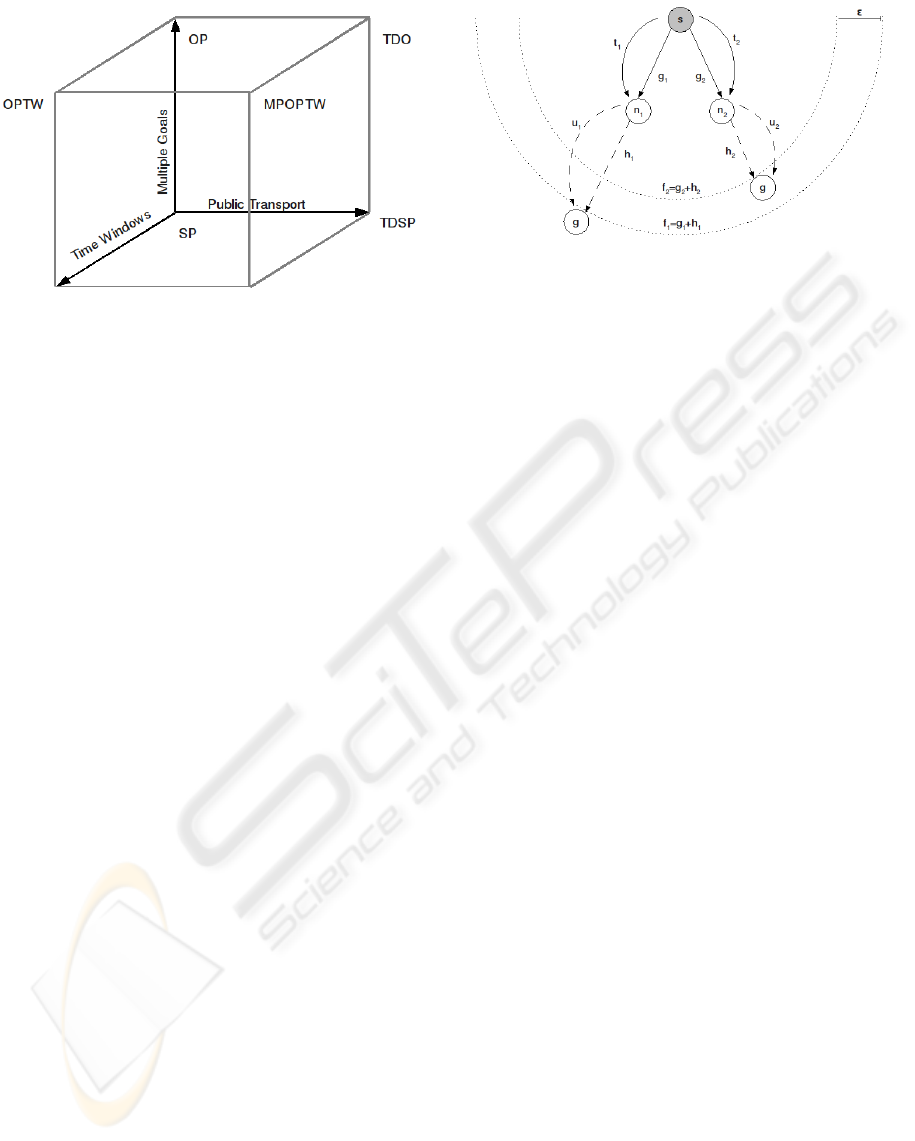
Figure 4: Routing Problems for Different Needs.
A second important finding of our study is that
users do not evaluate the utility of a route on a one-
dimensional scale (where there is always an opti-
mum), but try to find a compromise between mul-
tiple attributes that are not comparable among each
other. They accept locally sub-optimal proposals op-
timizing the benefits of a proposal and minimizing its
risk globally.
For example, somebody traveling with a lot of lug-
gage accepts using a bus line that arrives some min-
utes later at the train station than the fastest one, but
is much less crowded. Obviously, in this context, the
comfort of the trip is valued higher than the dura-
tion. From an algorithmic point of view, this means
that the standard shortest path approach cannot be ap-
plied successfully in order to satisfy the user needs
as good as possible. However, searching according to
a heuristic function that forces the search procedure
to visit (almost) the whole search space is no attrac-
tive option for developing programs intended to run
in real-time.
4.1 An h
ε
u-optimal Algorithm for
Comfortable Routes
The key to an efficient solution that belongs to the
complexity class as A* and retains it’s soundness
and completeness is therefore to use a) a monotone
heuristic function h for computing correct solutions
and b) to incorporate a non-monotone, multi-attribute
heuristic u for the user preferences into the search pro-
cedure.
In Fig. 5 you see two paths from the start node s
to a goal node g. g
i
denotes the actual costs from s
to the node which is currently being expanded, h
i
the
estimated costs to g according to the heuristic func-
tion h. u
i
denotes the actual valuation from s to the
node which is currently being expanded, t
i
the esti-
Figure 5: h
ε
u-optimal Expansion of the Search Space.
mated valuation to g according to the multi-attribute
heuristic function u (user preferences).
If there is exactly one optimal successor state with
|g
1
+ h
1
− g
2
− h
2
| > ε, the search procedure works
as usual. In the case of |g
1
+ h
1
− g
2
− h
2
| ≤ ε, both
paths from s to g in Fig. 5 are undistinguishable in h.
In practical applications, if |g
1
+ h
1
− g
2
− h
2
| ≤ ε
then often other criteria become relevant for deci-
sions. In order to explain the meaning of ε, let us
consider the two public transport connections from s
to g in Fig. 5: one takes 50 minutes, the other one 47
minutes. However, the first connection requires fewer
changes of transportation than the second one. If the
user dislikes changes, the first connnection is optimal
according to the user preferences u under the assump-
tion of an ε-tolerance ε ≥ 3minutes.
In order to select a path that is both optimal in the
sense of h given ε and in the sense of u, we compute
the ranking p
1
= t
1
+ u
1
and p
2
= t
2
+ u
2
of both op-
tions. The vectors p
1
and p
2
represent all user prefer-
ences in u. Each dimension represents a single prefer-
ence (cf. the list of criteria in section 4). As the pref-
erence space to which p
1
and p
2
belong is partially or-
dered, in general there is no unique minimal element.
Therefore, we compute a pareto-optimal set which in-
cludes all paths which cannot be distinguished neither
by h nor by u. The final selection of a path which is
h
ε
-optimal and u-optimal is performed by applying a
decision procedure. For calculating decision proce-
dures, we use the MADL programming language, as
described in (Ludwig et al., 2009). We call the result
h
ε
u-optimal.
4.2 An Approximation of the
h
ε
u-optimal Algorithm
Instead of implementing the h
ε
u-optimal algorithm
directly, we simulated it’s behavior by having the path
search procedure compute the n-best list of solutions
for a given destination. Each of these n solutions is
ROSE - AN INTELLIGENT MOBILE ASSISTANT - Discovering Preferred Events and Finding Comfortable
Transportation Links
369

evaluated according to the user preferences. The final
set of m < n solutions is the set of m routes which are
h
ε
u-optimal.
In out first prototype, we implemented the n-best
approach in order to obtain an evaluation platform as
fast as possible. The algorithm works in two steps:
1. Compute n Best Results
Just computing the n best routes using always the
same heuristics often leads to proposals that only
differ minimally among each other — in particu-
lar, if just one line serves as public transport to the
destination. Therefore, it is better to compute n
routes using n different (optimistic) heuristics and
to compare the n resulting best routes. This obser-
vation has also been made by (Tumas and Ricci,
2009).
2. Rank the n Best Lists
In order to get a global score for each user prefer-
ence and each route, we sum up the contributions
of each segment of the route to each criterion. The
sum is called the rating of the route correspond-
ing to the criterion under investigation. Finally, a
total score is computed: The easiest approach to
take multiple criteria into account is to compute a
weighted sum of all criteria by multiplying each
rating with the weight for the preference as en-
tered by the user in the configuration dialog for
the ROSE system (see Figure 1 left).
A more elaborate approach is to compute a pareto-
optimum for the rating of the n routes. Beyond
that, it is possible in our system to apply other
multi-attribute decision rules, as the Take The Best
decision rule proposed by (Gigerenzer and Gold-
stein, 1996).
5 CONCLUSIONS AND
OUTLOOK
ROSE is a recommendation, route planning and nav-
igation system for mobile devices. To integrate user
multiple preferences and decision rules into the route
planning process, we developed a h
ε
u-optimal algo-
rithm.
We tested ROSE on a major event with 20.000
people to recommend subevents and calculate routes
using the local bus network. We conducted a user
study, from which we hope to get more information
about the relevance of different user preferences in
recommendation and navigation.
REFERENCES
Bellotti, V. (2008). Activity-based serendipitous recom-
mendations with the magitti mobile leisure guide. CHI
2008 Proceedings, 21:498–516.
Garcia, A., Arbelaitz, O., Otaeguui, O., Vansteenwegen, P.,
and Linaza, M. (2009). Public transportation algo-
rithm for an intelligent routing system. 16th ITS world
congress, September 21-25, Stockholm, Sweden.
Gigerenzer, G. and Goldstein, D. (1996). Reasoning the
fast and frugal way: Models of bounded rationality.
Psychological Review, 103:650–669.
Hochmair, H. (2004). Decision support for bicycle route
planning in urban environments. Proceedings of the
7th AGILE Conference on Geographic Information
Science, Crete University Press, Heraklion, Greece,
pages 697–706.
Ludwig, B., Zenker, B., and Schrader, J. (2009). Recom-
mendation of personalized routes with public trans-
port connections.
Maruyama, A., Shibata, N., Murata, Y., and Yasumoto, K.
(2004). P-tour: A personal navigation system for
tourism. Proc. of 11th World Congress on ITS, pages
18–21.
Tumas, G. and Ricci, F. (2009). Personalized mobile city
transport advisory system. ENTER Conference 2009.
van Setten, M., Pokraev, S., and Koolwaaij, J. (2004).
Context-aware recommendations in the mobile tourist
application compass. Adaptive Hypermedia and
Adaptive Web-Based Systems, pages 235–244.
Voelkel, T. and Weber, G. (2008). Routecheckr: personal-
ized multicriteria routing for mobility impaired pedes-
trians. Proceedings of the 10th international ACM
SIGACCESS conference on Computers and accessi-
bility, pages 185–192.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
370
