
THE SHORT-TERM BENEFITS OF EDUCATIONAL ROBOTICS
WHEN PAIRED WITH GEOSPATIAL TECHNOLOGIES IN
INFORMAL LEARNING ENVIRONMENTS
Bradley S. Barker, Gwen Nugent, Viacheslav I. Adamchuk
Institute of Agriculture and Natural Resources, University of Nebraska-Lincoln, 114 Ag Hall, Lincoln, NE, U.S.A.
Neal Grandgenett
Teacher Education Department, University of Nebraska-Lincoln, Omaha, NE, U.S.A.
Keywords: Informal Learning, STEM, Robotics, GPS, GIS.
Abstract: Educational robotics, when paired with geospatial technologies and taught in an informal educational
environment, can be an innovative strategy to teach youth about science, technology, engineering, and
mathematic (STEM) concepts. However, little is known about the true effects on conceptual knowledge and
associated attitudes. Therefore, this study was conducted to examine the short-term effects of a series of
five-day summer robotics/geospatial camps held in Nebraska. The study was conducted at six diverse
locations and consisted of a five-day 4-H camp experience. The study examined the experiences of 147
youth between the ages of 10 and 15. A pretest-posttest quasi-experimental design was used in the study.
Instrumentation consisted of a 37-question multiple-choice assessment targeting various STEM topics, and a
38-question attitude questionnaire assessing STEM interests and attitudes. Results suggest that the 4-H
robotics and geospatial summer camp program is a promising approach for supporting STEM-related
learning and enhancing attitudes towards STEM.
1 INTRODUCTION
The Nebraska 4-H, with grant funding from the
National Science Foundation, is developing a
program to increase science, technology,
engineering and mathematics (STEM) achievement
and interest using robotics and geospatial
technologies. The widespread availability of robotic
kits such as the LEGO NXT Mindstrom kit,
handheld Global Positioning System (GPS) devices,
and geographical information systems (GIS) like
GoogleEarth and ArcMap make it possible for youth
(ages 10 to 15) to explore the integration of these
technologies. The curriculum was developed by
Nebraska 4-H and faculty from University of
Nebraska’s Biological Systems Engineering
Department, in cooperation with Carnegie Mellon
University’s Robotics Academy, and involves 40
hours of instruction. The 40-hour summer camp
activities include the building and programming of
robots, working with handheld GPS receivers to
explore and collect information, and the
development and customization of GIS maps. The
camp activities were led by project staff and in some
cases faculty from the University of Nebraska. The
content and context for the activities were delivered
in a short introductory lecture format followed by
hands-on activities. Two formal STEM-related
assessments were also administered, one related to
conceptual learning and one related to attitudes. The
participating youth also shared their general
perceptions of the activities.
Research in the use of educational robotics in an
informal learning environment implies that robotics
can increase academic achievement in specific
STEM concept areas closely aligned with formal
education topics and coursework (Nourbakhsh et al.
2005; Barker & Ansorge, 2007; Barker, Nugent,
Grandgenett, & Hampton, 2008). Similarly, past
research has indicated that GIS can be used to teach
project-based science, environmental education and
geography concepts to middle school students
(McWilliams & Rooney, 1997). Research also sug-
393
S. Barker B., Nugent G., I. Adamchuk V. and Grandgenett N. (2010).
THE SHORT-TERM BENEFITS OF EDUCATIONAL ROBOTICS WHEN PAIRED WITH GEOSPATIAL TECHNOLOGIES IN INFORMAL LEARNING
ENVIRONMENTS.
In Proceedings of the 2nd International Conference on Computer Supported Education, pages 393-398
Copyright
c
SciTePress

Table 1: Camp Participant Demographics.
gests that the use of GIS helps in the development of
analytical skills and problem solving (Wanner &
Kerski, 1999). Moreover, there is growing interest in
examining students’ attitudes towards learning, with
recognition that affect surrounds cognition and can
moderate learners’ conceptual change (Alsop &
Watts, 2003; Koballa & Glynn, 2007). Measuring a
student's attitude is not a trivial matter; and much of
the robotics literature looking at attitudes relies
heavily on subjective secondary observation. For
example, Rogers and Portsmore (2004) reported that
using robotics as an outreach activity in elementary
schools increased confidence and interest in
mathematics and science. This conclusion was based
on teacher perceptions; the researchers did not
directly gather any data from individual youth
participants.
There are several instruments that have been
developed to assess youth attitudes within science-
related contexts. The most widely used is arguably
the Scientific Attitude Inventory (SAI) developed by
Moore and Sutman (1970). The SAI (I) consisted of
a 60 item, four-point Likert-type scale with a series
of 12 statements of attitude called “position
statements.” These twelve position statements assess
six scientific attitudes – three based on intellectual
attitudes and three based on emotional attitudes. The
six attitudes include: 1) laws of science, 2) scientific
explanation, 3) manner of scientific observation, 4)
value of scientific activities, 5) usefulness of science
to society and 6) student career aspirations. Each
scientific attitude has a positive and a negative scale
to create the 12 position statements used as
potentially measurable constructs. According to
Moore and Sutman (1970) the reliability of the SAI
was measured through the use of the Winer test-
retest method using the pre and posttest scores of the
control group resulting in a test-retest reliability
coefficient of .934. Based on the lack of significance
using the SAI and other instruments when piloting
the project, we elected to develop our own
instrument based on specific constructs that
originate from our 4-H robotics and GPS/GIS
program. Our instrument measures eight scales
including: task values in science, mathematics,
robotics, and GPS/GIS, problem solving/critical
thinking, cooperative learning/teamwork, self
efficacy in robotics, and self efficacy in GIS/GPS.
2 PURPOSE AND
METHODOLOGY
The purpose of this study was to investigate the
short-term impacts of informal summer programs
centered on robotics and geospatial technologies in
a) promoting STEM learning for youth ages 10-15
and b) positively impacting their attitudes towards
STEM. A total of 147 participants in six different 4-
H facilitated camps participated in the summer
program. Overall, 112 males and 35 females
attended the camps. In addition, 75% of participants
were identified as Caucasian, 12% were African
American, 12% were Hispanic and 1% Asian. The
overall mean age for the camps was 12.28 years with
a median age of 12.00 years. Demographics are
displayed by location in table one.
2.1 Instrumentation
The instrumentation used for the study consisted of
two parts. To measure STEM learning, the project
staff developed a 37-item, paper-and-pencil,
multiple-choice assessment, covering a variety of
topics including computer programming,
mathematics, geospatial concepts and engineering/
robotics. The assessment was based on a previous
24-item robotics assessment instrument that
demonstrated a Cronbach’s alpha reliability
Location
Demographics of Camp Participants
N total
Male
Female
Age (Mean)
% Minority
Overnight
1. Omaha North
18
9
9
11.39
100
No
2. Omaha South
16
9
7
11.12
56
No
3. Lincoln
67
55
12
12.52
12
Yes
4. Ord
10
9
1
12.40
0
No
5. Chadron
16
13
3
12.69
0
Yes
6. Grand Island
20
17
3
12.80
5
No
CSEDU 2010 - 2nd International Conference on Computer Supported Education
394

Table 2: Content questionnaire paired samples test.
Location
Paired Differences
Pre Mean
Post Mean
Mean
Std.
Deviation
t
df
Sig. (2-tailed)
Omaha North
10.80
10.53
.267
3.22
.32
14
.753
Omaha South
11.58
15.50
-3.92
3.55
-3.82
11
.003
Lincoln
16.87
20.87
-4.00
3.01
-10.90
66
.001
Ord
17.60
23.80
-6.20
4.21
-4.66
9
.001
Chadron
16.53
23.20
-6.67
2.90
-8.93
14
.001
Grand Island
15.89
23.78
-7.89
3.18
-10.53
17
.001
coefficient of 0.86 (Barker & Ansorge, 2007). Two
experts from Carnegie Mellon University’s Robotics
Academy and two engineers from the University of
Nebraska-Lincoln Department of Biological
Systems Engineering reviewed and validated the
assessment instrument’s content. The overall
Cronbach’s alpha reliability coefficient of 0.80 was
reported for this instrument.
The attitude instrument was also developed by
the project staff and was modeled after the
Motivated Strategies for Learning Questionnaire
(Pintrich, et al., 1991). The questionnaire focuses on
the following eight constructs: task value for
science, mathematics, robotics and GPS/GIS,
problem solving/critical thinking, cooperative
learning/teamwork, self-efficacy in robotics and
self-efficacy in GPS/GIS. All the statements on the
attitude instrument used positively worded items due
to the relatively young age of the participants. The
task value for science included questions like “It is
important to me to learn how to conduct a scientific
investigation.” The mathematics task value construct
included questions like “It is important for me to
learn how to make accurate measurements to help
solve mathematical problems.” The robotics
construct asked questions like “It is important for me
to learn about robotics.” The GPS/GIS construct
included questions like “It is important for me to
learn about GIS.” In addition, problem solving skills
(i.e.” I try new methods to solve a problem when
one does not work”) and teamwork constructs (i.e. “I
like being part of a team that is trying to solve a
problem”) were also explored. Finally the instrument
examined self-efficacy in robotics (i.e. “I am
confident that I can program a LEGO robot to follow
a black line using a light sensor”) and GPS/GIS
concepts (i.e. “I am certain that I can log locations of
a series of waypoints within a GPS unit”). The
overall Cronbach’s alpha reliability coefficient of
0.94 was reported for this administration of the post
attitudinal instrument.
2.2 Data Collection
The pretest was administered by the researchers on
the first day of the camp prior to the start of program
activities. The posttest was administered in the
morning of the last day of camp. Administration of
the pretest-posttest assessment was conducted in the
same manner for each camp.
2.3 Data Analysis Procedures
The study used a pretest-posttest quasi-experimental
design, with the same assessment acting as both a
pretest and posttest in each summer campsite. The
learning assessment used a total score for the
number of items correct. The primary analysis was a
repeated measures t-test for the combined groups by
location. The attitudinal instrument used a five-
point Likert-type scale with five equaling “strongly
agree” and one equaling “strongly disagree”. A total
score was calculated by summing all 38 items and
comparing them using a repeated measures t-test for
the entire group and by location.
THE SHORT-TERM BENEFITS OF EDUCATIONAL ROBOTICS WHEN PAIRED WITH GEOSPATIAL
TECHNOLOGIES IN INFORMAL LEARNING ENVIRONMENTS
395
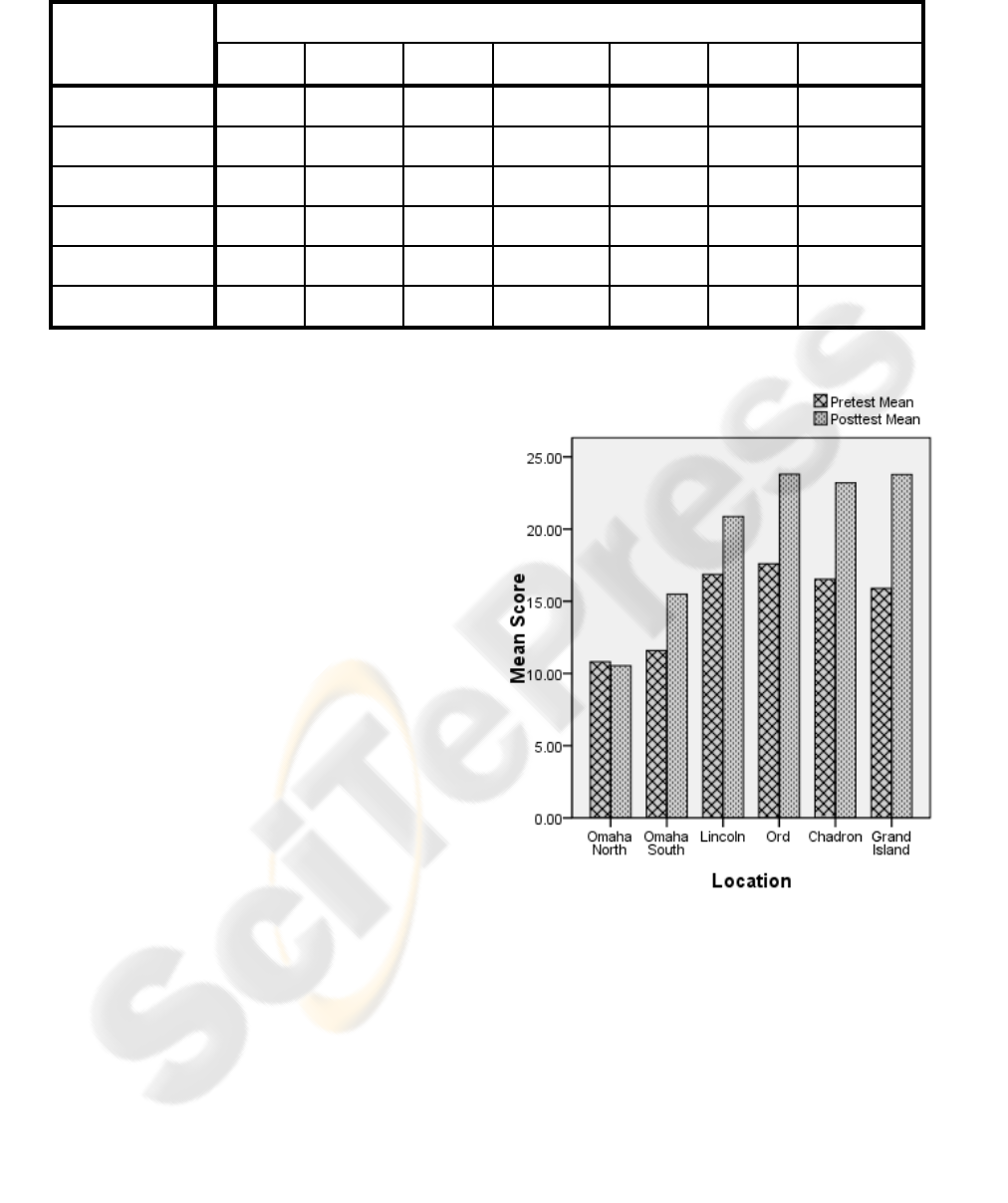
Table 3: Attitudinal paired samples test.
3 RESULTS
3.1 Learning
Overall there was a significant increase from the
pretest (M = 15.63, SD = 4.52) to the posttest scores
(M = 20.12, SD = 5.60, t (136) = -13.71), p < .001)
for the combined groups. These results suggest that
the 4-H robotics and the geospatial summer camp
program is a promising approach for supporting
STEM-related learning. Results suggest that, overall,
youth had significant increases in scores. Each
location except for Omaha North had a significant
mean increase (p < .001) from pre to posttest. See
Table 2.
To get a better understanding of how individual
sites scored on the test; the mean scores are
separated by location. See Figure 1. The sites are
listed in chronological order with the Omaha North
camp first and ending with the Grand Island camp
six weeks later.
3.2 Attitude
Similar to the knowledge instrument participants
scored significantly higher on the posttest
(M=155.91, SD = 20.20) than on the pretest
(M=147.52, SD = 22.03, t (133) = -5.09), p < .001)
indicating the 4-H robotics and GPS/GIS summer
camps have a positive short-term effect on attitudes
towards STEM topics. While all sites excluding the
Omaha North had pre-post increases in attitudinal
means, the t-results were not as significant as those
from the content test. In addition, three sites did not
have significant increase in scores. See table 3.
Figure 1: Pre and posttest mean scores by location for the
content test.
4 DISCUSSIONS AND
CONCLUSIONS
The significant increase in student scores on the
learning assessment provides evidence for the use of
robotics and GIS/GPS technologies as a means to
promote STEM learning. With one exception, all the
sites produced short-term gains from pre to posttest.
Location
Paired Differences
Pre Mean
Post Mean
Mean
Std. Deviation
t
df
Sig. (2-tailed)
Omaha North
152.93
152.87
.067
22.72
.011
14
.991
Omaha South
148.09
153.45
-5.36
9.39
-1.89
10
.088
Lincoln
149.39
156.13
-6.75
14.95
-3.69
66
.001
Ord
148.11
161.67
-13.56
26.81
-1.52
8
.168
Chadron
138.13
151.06
-12.94
22.98
-2.25
15
.040
Grand Island
143.31
161.13
-17.81
23.89
-2.98
15
.009
CSEDU 2010 - 2nd International Conference on Computer Supported Education
396

The Omaha North site did not show significant
improvement from pre to posttest scores. One
plausible explanation for the lack of improvement at
that site is that chronologically it was the first camp
run by the project staff. Therefore, activities and
presentation methods were still relatively new, and
were still evaluated and refined. This can be
supported by the apparent increase of the mean
paired difference between post and pretest that
occurred later in the program. Another difference
with the Omaha North site is that it had a lower
mean score on the pretest (M=10.80, SD = 3.22)
compared to other sites. The lower pretest score
may indicate that this particular group of youth did
not have as much initial experience and therefore,
prior knowledge of robotics and geospatial concepts
as other groups, perhaps suggesting that at least a
minimal level of initial understanding of these topics
is needed for students to be fully successful with this
level of activities.
Documenting the positive impacts of robotics
and GPS/GIS activities on student’s attitudes has
been a struggle in past research (Nugent, Barker, &
Grandgenett (2008). Prior to this study the project
team piloted two other existing attitude instruments
(Scientific Attitude Inventory, Moore & Foy. 1997;
Pell & Jarvis, 2001) with nonsignificant pre to post
comparisons. Past results suggest that youth have a
difficult time in making the connection between
STEM concepts and Robotics and GPS/GIS
activities. When robotics and GPS/GIS are
embedded into a natural experiential learning
environment, as opposed to the more traditional
direct instruction, students may become excited
about robotic and GPS/GIS, but not recognize that
STEM learning is actually being integrated into the
activities. Results have led to curricular revisions,
including specific instruction on how robotics
activities relate to science, engineering, math and
technology and the creation of a new measurement
tool.
The results of this study indicate that our
attitudinal measurement instrument can detect short-
term attitudinal changes towards STEM. More
research is needed to examine each of the eight
constructs and to assess various trends and the
potential interactions of these constructs with
participant demographics.
ACKNOWLEDGEMENTS
This material is based upon work support by the Na-
tional Science Foundation under Grant No. ESI-
0624591 and DRL-0833403
REFERENCES
Alsop, S. & Watts, M. (2003). Science education and
affect. International Journal of Science Education. 25
(9), 1043-1047.
Barker, B. & Ansorge, J. (2007). Robotics as means to
increase achievement scores in an informal learning
environment. Journal of Research on Technology
Education 39(3), 229-243.
Barker, B., Nugent, G., Grandgenett, N., Hampton, A.
(2008) Examining 4-H robotics in the learning of
science, engineering and technology topics and the
related student attitudes. Journal of Youth
Development: Bridging Research and Practice Volume
2(3). On-line:
http://www.nae4ha.org/directory/jyd/jyd_article.aspx?i
d=f5a34e58-1cd3-4994-981d-b81fa406cd74
Halpern, D., Aronson, J., Reimer, N., Simpkins, S., Star,
J., Wentzel, K. (2007). Encouraging Girls in Math and
Science. Washington DC: National Center for
Education Research.
Koballa, T. & Glynn, S. (2007). Attitudinal and
motivational constructs in science learning. In S. Abell
and N. Lederman (Eds,) Handbook of Research in
Science Education (pp. 75-102). Mahwah, New
Jersey: Erlbaum.
Lester, B. (2007). Robots’ allure: can it remedy what ails
computer science? Science, 318, 1086-1087.
McWillimas, H. & Rooney, P. (1997). Mapping our city:
Learning to use spatial data in the middle school
science classroom. Paper presented at the annual
meeting of the American Educational Research
Association. Chicago, IL.
Moore, R. & Foy, R. (1997). The scientific attitude
inventory: A revision (SAI II). Journal of Research in
Science Teaching, 34(4), 327-336.
Moore, R. & Sutman, F.X. (1970). The development, field
test, and validation of an inventory of scientific
attitudes. Journal of Research in Science Teaching, 7,
85-94.
Nourbakhsh, I., Crowley, K., Bhave, A., Hamner, E.,
Hsium, T., Perez-Bergquist, A., Richards, S. &
Wilkinson, K. (2005). The robotic autonomy mobile
robots course: Robot design, curriculum design, and
educational assessment. Autonomous Robots, 18(1),
103-127.
Nugent, G., Barker, B., & Grandgenett, N. (2008). The
effect of 4-H robotics and geospatial technologies on
science, technology, engineering, and mathematics
learning and attitudes. Proceedings of the Ed Media
Conference, Vienna, Austria, July 4, 2008.
Pell, T. & Jarvis (2001). Developing attitude to science
scales for use with children of ages from five to eleven
years. International Journal in Science Education,
23(8), 847-862.
THE SHORT-TERM BENEFITS OF EDUCATIONAL ROBOTICS WHEN PAIRED WITH GEOSPATIAL
TECHNOLOGIES IN INFORMAL LEARNING ENVIRONMENTS
397

Pintrich, P.,Smith, D., Garcia, T., & McKeachie, W.
(1991). A Manual for the Use of the Motivated
Strategies for Learning Questionnaire (MSLQ). Ann
Arbor, MI: University of Michigan.
Rogers, C., & Portsmore, M. (2004). Bringing engineering
to elementary school. Journal of STEM Education,
5(3&4), 17-28.
Wanner, S.& Kerski, J. (1999). The effectiveness of GIS
in high school education. Paper presented at the ESRI
1999 users conference. Available at:
http://gis.esri.com/library/userconf/proc99/proceed/pa
pers/pap203/p203.htm
CSEDU 2010 - 2nd International Conference on Computer Supported Education
398
