
CONCEPTION OF A PHOSPHENE BASED VISUAL SYSTEM
A Functionnal Approach
Guillaume Tatur, Isabelle Marc
Équipe STINIM LGI2P, Ecole des Mines d’Alès, Site Eerie Parc Scientifique et Technique Georges Besse
69 rue Georges Besse, 30035 Nimes cedex 1, France
Michel Dumas
Équipe STINIM, Institut d’Electronique du Sud, Montpellier, France
Gerard Dupeyron
Institut ARAMAV, Nimes, France
Keywords: Visual prosthesis, Mobility, Man–machine interaction (MMI), Traversability analysis, Prosthetic vision
simulation.
Abstract: This work falls within the broader framework of visual prostheses conception for blind people suffering
from a retina photoreceptor cells degenerative disease. Studies on the issue of informational content of the
prosthetic vision propose, in majority, a simple reduction in the resolution of greyscale images from a single
camera. Our work proposes a novel approach based on functional vision. This functional vision is dedicated
to specific needs in mobility, and is based on a simple analysis and less ambiguous representation of the
scene layout. Emphasis is placed on the usefulness of providing access to 3D information combined with the
use of an eye tracking device that should greatly improve spatial knowledge acquisition. This work presents
extraction and proper formatting of data from optical sensors in order to establish a coherent vision based on
the generation of a limited number of phosphenes.
1 INTRODUCTION
Prosthetic vision is currently one of the most
promising fields of research in the domain of
therapies for degenerative retinal diseases like Age
related Macular Degeneration (AMD) or Retinitis
Pigmentosa (RP). All of the works around the world
are based on the same concept: bypass the destroyed
outer retinal layer and use information extracted
from camera images for direct stimulation of inner
retinal neurons, optic nerve or visual cortex.
Electrical stimulation by current injection in
electrode array is known for a long time to induce
discrete visual sensations like spots of light, called
phosphenes. Research is underway to define the
better place for the stimulation, the most efficient
electrode geometry and current pulse pattern. Our
work is devoted to another question: what is the
minimal information which has to be sent to the
stimulator?
One can define a two-step approach: information
selection, which is obtained by image processing,
and information representation, which is the method
used to link visual objects and visual perception. The
former is not so intensively studied, although the
latter is widely discussed. However, even the most
recently designed stimulation implants exhibit a very
limited number of electrodes compared to the
number of fibres involved in the natural vision
process. In consequence, the amount of data that can
be sent at a moment to the stimulated neurons
appears to be extremely poor. Preliminary image
analysis may then increase the relevance of
stimulation data.
This paper presents our attempts to define the
concept of “functional vision by phosphenes”, which
is in relation with both information selection and
representation steps, as previously defined. Image
processing is directly inspired by collaboration with
rehabilitation specialists. The final objective is to
339
Tatur G., Marc I., Dumas M. and Dupeyron G. (2010).
CONCEPTION OF A PHOSPHENE BASED VISUAL SYSTEM - A Functionnal Approach.
In Proceedings of the Third International Conference on Bio-inspired Systems and Signal Processing, pages 339-344
DOI: 10.5220/0002758103390344
Copyright
c
SciTePress

provide the subject with meaningful visual cues of
the environment, based on the perception of
phosphenes. This functional vision should restore
autonomy in day to day tasks of mobility in known
or unknown environment, in contrast with an acuity
based vision (supposed to restore the ability to read)
proposed by a majority of research teams in the
domain.
2 PROSTHETIC VISION
When some elements of the chain of perception (the
photoreceptor cells in the case of RP or AMD) are
no longer operative, it is potentially possible to
bypass them and stimulate the optical pathways
downstream, in order to restore a kind of rough
visual perception. Fundamental element that
composes this perception is called phosphenes.
Phosphenes are entoptic phenomena characterized
by the sensation of perceiving light in the form of
dots or bright areas, caused by mechanical, electrical
or magnetic stimulation of the optical pathways. Up
to now, visual prostheses are based on electrical
stimulation through microelectrodes. Several types
of implants are under test; the different kinds of
implant are: Cortical implants (Fernandez, 2004),
sub-retinal implants (Chow, 2002), optic nerve
electrodes (Delbeke, 2001) and epi-retinal implant
(Humayun, 2003).
According to various clinical trials, the generated
phosphenes have some properties that it is possible
to set according to stimulation parameters (Dagnelie,
2001): the position in the visual field appears to rely
on the position of excitation electrode, the size
depends on the number of cells recruited by the
stimulation, and the brightness, depending on the
intensity and repetition frequency of stimulation.
2.1 Simulations of Prosthetic Vision
Experimental procedures with sighted people and
pixelised vision simulator are the more convenient
way to test methods for the delivery of information
to the stimulator, even though these tests are far
from the real situation of blind patients with visual
prosthesis.
Studies of Cha et al (Cha, 1992) are often cited
as a reference for either performance in acuity or in
navigation following the characteristics of the vision
provided. The conclusion is that the best
compromise between FOV size, number of pixels
and performances in mobility tasks is obtained for a
30 ° FOV and an image of 25x25 pixels uniformly
spaced, captured by a simple camera. These results
are similar to those found in (Sommerhalder, 2006).
In these previously mentioned papers, information
representation is based on gray level dots, with
square or circular shapes, which are mapped on
square or hexagonal lattices. Information is
processed from a gray level image. The camera
resolution is much higher than the possible number
of electrodes for implants currently in progress: 4*4
electrodes for the Argus I epiretinal implant and 60
electrodes for the second-generation “Argus II”
(Dagnelie, 2007). Selection of information data is
then required. The common choice is to reduce the
resolution of the entire image: split it into blocks of
values equal to the average gray level of pixels that
they contain. Light intensity for each dot is then
driven by the value of the corresponding block (see
fig.1). In (Chen, 2009), different others methods are
compared. Gaussian filtering of the corresponding
visual field of the phosphene appears to induce
slightly more efficient perception. Improvement
carried on by edge detection is also studied.
Figure 1: Left: Input greyscale image. Right: prosthetic
vision simulation (4x4 matrix, regional averaging
technique: mean gray values of the corresponding block,
256 gray levels, contrast: 100%).
2.2 First Clinical Test Results
First clinical trials give the possibility to directly test
the methods used to generate phosphene. In (Brelen,
2005), four cuff electrodes are wrapped around the
optic nerve. At the first step of experimentation,
reproducible cartography of the perceived
phosphenes is established in relation with the
stimulation parameters. Recently, in (Margalit,
2002), (Yanai, 2007), (Humayun, 2003) are
described the concepts, tests and results in some
tasks of vision (discrimination of the direction of
movement, forms, object detection) performed by
implanted patients.
In all these experiments, implants are composed
of very few electrodes. It results in a reduction of
resolution that makes information highly ambiguous;
however it allows the detection of light sources and
of very large and contrasted objects. Furthermore,
mobility tasks are not intensively studied.
BIOSIGNALS 2010 - International Conference on Bio-inspired Systems and Signal Processing
340

3 FUNCTIONAL VISION BY
PHOSPHENES
First results in prosthetic vision fields raise
considerable interest and hope in the population
concerned by blindness. Nevertheless, the sparse
visual perceptions provided to the first implanted
patients are far from being really useful in their
everyday life. We believe that emphasis should be
placed on works dealing with the first stage,
selection of information by image analysis.
Transmission of ambiguous information of the
environment as proposed by the approaches based
on the reduction of the image resolution leads to two
main problems: first the cognitive load of the subject
increases as he has to decode his perception, and
secondly these perceptions can potentially lead to
misinterpretations, which can be dangerous in the
context of mobility. Moreover, in all cases, the entire
field of view of the camera is transmitted; it is not
possible for the subject, like in natural vision, to
precisely focus his attention on a particular area of
the observed scene. To explore the scene, it is
necessary to change the position of the camera and
thus the head (in the case of an acquisition platform
embedded in a pair of glasses for example). It is a
long lasting and tiring action that does not
necessarily provide a better understanding of the
scene since each pixel captures the variations in light
reflected by the surrounding surfaces and objects.
Then, stable perception can hardly be generated and
the implant recipient will experience difficulties to
quickly extract information about the geometrical
structure of the scene or its constituent entities
during mobility tasks.
The input data of our system are provided by
cameras, as for the other research projects. But some
significant differences exist, which will be discussed
in the following. First, our objective is to increase
quality of life for blind people by increasing their
autonomy in mobility tasks. Second, selection of
relevant information is performed via a 3D image
analysis, using a stereoscopic pair, and it is enriched
with some additional data provided by an inertial
measurement unit and an eye tracking system.
Finally, the complete process of information
selection and representation is designed in
collaboration with functional rehabilitation
specialists (psychomotor therapists, orthoptists...).
All previously mentioned experiment results
emphasize the importance of the learning and self
adaptation to the extremely impoverished
information provided by an implant. Rehabilitation
strategies have to be established in parallel with
image analysis.
3.1 Functional Approach of Prosthetic
Vision: Geometrical Scene Analysis
Acuity tasks (recognition of characters or small
objects with simple shape) are clearly not in the
scope of this study. Instead, the goal is to give the
possibility to detect visual cues for mobility purpose
(detecting free space, anticipate and avoid static or
mobile obstacles, maintaining the body balance ....)
and orientation (recognition of places, landmarks...).
Knowledge of ego-centred distances between the
subject and the obstacles is the basis for safe
navigation. It is expected that this information of
distance may be encoded in a simple way (stimulus
intensity proportional to the obstacle proximity, for
example) in order to be interpreted quickly and
unambiguously. A vision based on this notion of
distance would require a minimum time of
interpretation (as opposed to the understanding of a
gray scale image, which is a very complex task) in
the frame of mobility tasks.
3.2 Gaze Direction and Construction of
Mental Map
As it is pointed out in (Berthoz, 2003), perceiving is
choosing, in all the available information, those that
are relevant related to the planned action. A possible
way to select this information is to measure the gaze
direction of the subject in real-time.
There are several advantages in the use of gaze
direction: interaction between the implanted patient
and its prosthesis is improved, which in turn
facilitates his construction of mental representation
of the surroundings based on rare spots of light. The
human visual system uses gaze direction and
saccades to explore the scene (Henderson, 2003).
Therefore, it seems more natural to take into account
the location where the subject wants to focus his
attention and enable the system to provide more
accurate local information. Moreover, some studies
suggest that for the acquisition of spatial knowledge,
the eye position is used to encode the perceived
space in a more abstract schematic commonly called
mental map, which is independent of anatomical
coordinates (Andersen, 1985). Moreover, the role of
eye movements in postural balance (Schulmann,
1987) could be exploited. Finally, it offers the
opportunity to use all the available points of
stimulation to describe the environment in the
observed area, and not in the whole camera field of
view.
We would like to point out that while
oculomotor movement of profoundly visually
CONCEPTION OF A PHOSPHENE BASED VISUAL SYSTEM - A Functionnal Approach
341
impaired or almost blind people are severely
reduced, it is still possible to restore this ocular
control by means of training with rehabilitation
specialist. Thus, restoring recently blind ocular
mobility for scene exploration is conceivable.
3.3 Information Representation
At this point of the study, no stimulation device is
chosen for the implantation, but some assumptions
can be made, which rely on the literature data: a
hundred of points of stimulation are available,
maybe less, and some phosphene characteristics may
be modulated : intensity and/or size.
As described above, in the standard approach,
the entire image is send through the few points of
stimulation the device is able to generate. Trivial
observation of human eye processing may lead to a
more efficient mode of data transmission: human
vision involves two different mechanisms, a foveal
vision with high acuity in the central FOV, and a
peripheral field vision dedicated to alert and
perception of motion.
To be consistent with human visual perception,
we break down the image representation into two
zones: a "central" zone providing local description
(narrow visual FOV, high density of phosphenes)
that facilitates the perception of 3D contrasts. In
addition, in a "peripheral" zone, the data will be
even more specific in order to provide information
from a wider field of view and to give the possibility
of a faster interpretation of the perceptions. The
corresponding points of stimulation will be used for
obstacle or movement detection purpose.
4 GEOMETRICAL SCENE
ANALYSIS
Restoring functional vision for blind people requires
transmission of information which is both
unambiguous and specific for mobility tasks. It may
be noted that the ambiguity decreases as information
becomes more specific. 3D contrasts and obstacle
detection appear to provide data more invariant and
much less ambiguous than simple mean of gray
levels of pixels. This assumption has to be validated
through tests using simulation of vision by
phosphenes. The early stages of data selection are
presented in the following.
4.1 Experimental Setup
Images are acquired from a stereoscopic device
(STH- MDCS3 from Videre Design). Output data
are dense disparity maps (images in which output
pixel values are proportional to the depth of the
scene) at real time. Axe of gravity is gained from an
accelerometer (Analog Devices ADXL330). Eye
tracking is performed by ViewPoint EyeTracker
GigE-60 from Arrington Research, Inc.
4.2 Central and Peripheral Field
Analysis
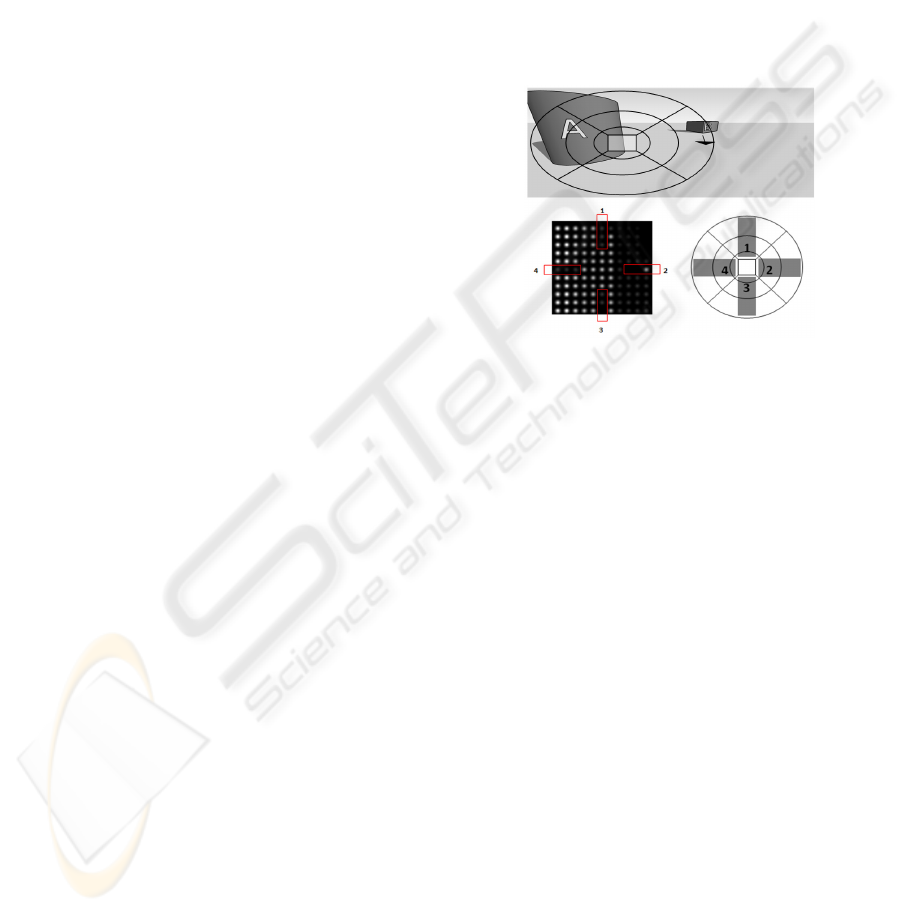
The camera FOV is decomposed into two areas,
central and peripheral (Figure 2).
Figure 2: Schematic summary of our scene analysis
paradigm and its representation. Upper input image is
probed by a specific mask. Bottom left image represents
simulated phosphenes. Peripheral information is analysed
through angular sectors surrounding the central area.
Information in each sector controls the corresponding
phosphene appearance (related phosphene groups outlined
in the bottom left image). The central area (square region
in the bottom right and upper image) directly probes the
scene depth with a high number of phosphenes.
The characteristics of these two areas, in terms of
involved camera FOV and phosphene density, will
be further précised by experimentation. Preliminary
assumptions are the followings: in the central zone,
where 3D depth data will be directly used as
stimulation data, it is assumed that the spatial
resolution is fine enough to let the subject capable to
detect free space as wide as a doorway, at a distance
of 5 meters, in his gaze direction. On the other hand,
the number of phosphenes is large enough to
visually cover a ground projected area of the size of
a standing person at 2 meters. In the peripheral
field, the choice is made to transmit not directly the
3D coordinates, but only the presence and location
of obstacles. The scene is then divided into ground
and objects above the ground (obstacles). Only the
distance to the nearest objects will be transmitted to
the stimulator. Additionally, in a more bio-inspired
approach, it will be interesting to test the use of
BIOSIGNALS 2010 - International Conference on Bio-inspired Systems and Signal Processing
342

Time-to-collision (TTC) (Bruce, 1993) cues. As the
purpose of this peripheral vision is to provide alert
signals, objects situated at the same distance from
the user should have different visual weight
depending on their relative motion.
Obstacle detection processing is commonly
based on ground plan detection. “V-Disparity”
(Zhao, 2007), (De Cubber, 2009) (figure 3) is one of
such processing currently used for object/ ground
segmentation. This algorithm analyzes the disparity
image (obtained by finding the corresponding points
between the two stereoscopic images) and locates
the linear change in the depth along the image line
axis that is characteristic of a plan, the ground in our
case. In the following segmentation step, image
regions that do not follow the specific depth
variation of the ground plan are regarded as
obstacles (i.e. depth values above or under specific
thresholds for a given image line will be declared to
be part of an obstacle).
Figure 3: Left: input image. Centre: V-Disparity image.
Right: Obstacle segmentation output (white=obstacle,
dark=ground or no 3D data available).
We select “V-Disparity” considering the fact that
real time processing is needed and because of its
relative simplicity despite its good performance.
However, the V-Disparity algorithm is valid only if
the scene is observed in such a manner that image
lines are approximately parallel to the lines of equal
depth in the range image. In prosthetic vision
application, when the cameras are head worn, this
condition would restrain the user’s posture in order
to achieve best performance. The algorithm has to be
made invariant under rotation along the depth axis.
This is done by analysing images along the projected
gravity vector, through the use of an accelerometer
(figure 4).
Besides, the segmentation by means of this
algorithm is not controlled: i.e there is no metric that
evaluates the accuracy, and if the detected plan is
more likely to be the true ground plan or some
artefact. A method of verification has to be defined.
We chose to use the RANSAC algorithm (Fischler,
1981) to extract the parameters of the detected
ground from the V-Disparity outputs. As it works on
a reduced subset of 3D data points, this verification
should use fewer CPU time and memory than if we
try to locate the ground plane only by the RANSAC
method.
Figure 4: Upper left: Input greyscale image. Bottom left:
disparity map. Upper right: raw output of the ground
segmentation process with accelerometer. Bottom right:
output of the ground segmentation process without
accelerometer (white=ground). Corresponding V-Disparity
images in the middle column.
RANSAC offers the advantage of handling noisy
data. Moreover, the estimation is valid if at least
50% of the data follow the model sought. By
RANSAC, we look for the plan that best fit the 3D
points provides by the V-Disparity algorithm,
according to the least squares method. If the
parameters belong to a domain of acceptable values
(given the angle formed by the camera in relation to
gravity), the segmentation is accepted. Otherwise a
virtual plane is used; its normal vector is updated
using the inertial navigation system. Furthermore, by
refining the segmentation obtained via V-Disparity
by the supposedly more precise data from
RANSAC, we should be able to provide a more
accurate segmentation.
5 CONCLUSIONS
Methods used so far for information extraction and
transmission via prosthetic devices do not respond
adequately to the expectations of blind people. A
novel approach based on information’s relevance,
needed in a context of mobility, is described. It
directly results of interactions between the world of
functional rehabilitation (cooperation with
rehabilitation specialist) and the world of mobile
robotics, with attention to the recent advances in
exploration and traversability analysis. Perception
based on a geometric description of the scene
coupled with an eye tracking device appears to be
satisfactory. First step in the information selection is
the obstacle detection. It is performed by image
processing methods defined up to now for robotic
applications and somehow improved for a better
matching with prosthetic vision application. 3D
CONCEPTION OF A PHOSPHENE BASED VISUAL SYSTEM - A Functionnal Approach
343

information is then transmitted in two ways for
different purposes: a central area for a more acute
and local analysis of the geometrical layout of the
observed scene, and a peripheral area for obstacles
proximity and motion detection in a wider field of
view. We will make use of an eye tracking device in
order to enhance communication between the
prosthesis and the wearer and to transmit more
significant and useful information in relation with
the user’s intention and current action.
In order to validate this functional vision
approach, experiments are scheduled with both
sighted subjects and visually impaired subjects,
provided with pixelised vision simulator. Results
will be discussed elsewhere.
REFERENCES
Andersen R.A., Essick G.K., Siegel R.M, 1985. Encoding
of spatial location by posterior parietal neurons, In
Science, 230, 456-458.
Brelén M. E., Duret F., Gérard B., Delbeke J., Veraart C.,
2005. Creating a meaningful visual perception in blind
volunteers by optic nerve stimulation, In J. Neural
Eng., 22-28.
Bruce V., Green P., 1983. La perception visuelle :
physiologie, psychologie et écologie, Presse
Universitaire de Grenoble.
Cha K., Horch K.W., Normann R.A., 1992. Mobility
performance with a pixelized vision system, In Vision
research, vol. 32, 1367-1372.
Chen S. C., Suaning G. J., Morley J. W., Lovell N. H.,
2009. Simulating prosthetic vision: I. Visual models of
phosphenes, In Vision research, Vol. 49, 1493-1506.
Chow A. Y., Pardue M. T., Perlman J. I., Ball S. L., Chow
V. Y., Hetling J. R., Peyman G. A., Liang C., Stubbs
E. B. Jr , Peachey N. S., 2002. Subretinal implantation
of semiconductor-based photodiodes: durability of
novel implant designs. In J. Rehabil. Res. Dev. May-
Jun; 39(3): 313-21.
Dagnelie G., 2001. Prosthetic vision: exploring its
qualities and limits by means of simulations», In
Visual impairment and rehabilitation, vol. IV.
Montréal University.
Dagnelie G., Keane P., Narla V., Yang L., Weiland J.,
Humayun M., 2007. Real and virtual mobility
performance in simulated prosthetic vision, in J.
Neural Eng., 92-101.
Delbeke J., Pins D., Michaux G., Wanet-Defalque MC.,.
Parrini S. Veraart C., 2001. Electrical Stimulation of
Anterior Visual Pathways in Retinitis Pigmentosa, In
Investigative ophthalmology & visual science, vol 42,
291-297
De Cubber G., Doroftei D., Nalpantidis L., Sirakoulis G.
Ch., Gasteratos A., 2009. Stereo-based Terrain
Traversability Analysis for Robot Navigation.
Fernández E., Ahnelt P., Rabischong P., Botella C,
Garcia-de Quiros F., Bonomini P., Marin C.,
Climent R., Tormos J.M., Normann R.A., 2002. Towards
a cortical visual neuroprosthesis for the blind, In
EMBEC’02. IFMBE Proc 2002 3(2).
Fischler M. A., Bolles R. C.,1981. Random sample
consensus: a paradigm for model fitting with
applications to image analysis and automated
cartography, In Commun. ACM, Vol. 24, No. 6. 381-
395.
Henderson J. M., 2003. Human gaze control during real-
world scene perception, In Trends in Cognitive
Sciences, Volume 7, Issue 11,498-504.
Humayun M. S., Weiland J. D., Fujii G. Y., Greenberg R.,
Williamson R., Little J., Mech B., Cimmarusti V., Van
Boemel G., Dagnelie G., De Juan E. Jr., 2003. Visual
perception in a blind subject with a chronic
microelectronic retinal prosthesis, In Vision Research,
Volume 43, Issue 24, 2573-2581.
Margalit E., Maia M., Weiland J., Greenberg R., Fujii G.,
Torres G., Piyathaisere D., O'Hearn T., Liu W., Lazzi
G. , 2002. Retinal Prosthesis for the Blind In Survey
of Ophthalmology, Volume 47, Issue 4, 335-356.
Schulmann DL., Godfrey B., Fisher AG.,1987. Effect of
eye movements on dynamic equilibrium, In Phys.
Ther.
Vol. 67, No. 7, pp. 1054-1057.
Sommerhalder J.R., Perez Fornos A., Chanderli K., Colin
L., Schaer X., Mauler F., Safran A.B. and Pelizzone
M., 2006. Minimum requirements for mobility in
unpredictible environments, In Invest Ophthalmol Vis.
Sci., vol 47.
Yanai D., Weiland J., Mahadevappa M., Greenberg R.,
Fine I., Humayun M., 2007. Visual performance using
a retinal prosthesis in three subjects with retinitis
pigmentosa, In American Journal of Ophthalmology,
Volume 143, Issue 5, 820-827.
Zhao J., Katupitiya J., Ward J., 2007. Global correlation
based ground plane estimation using v-disparity
image, In IEEE International Conference on Robotics
and Automation, Roma, Italy, 10-14.
BIOSIGNALS 2010 - International Conference on Bio-inspired Systems and Signal Processing
344
