
TOWARDS ROBUST HYBRID CENTRAL/SELF-ORGANIZING
MULTI-AGENT SYSTEMS
Yaser Chaaban, J
¨
org H
¨
ahner and Christian M
¨
uller-Schloer
Institute of Systems Engineering, Leibniz Universit
¨
at Hannover, Appel Str.4, Hannover, Germany
Keywords:
Organic computing, Self-organisation, Coordination, Autonomous vehicles, Robustness, Multi-agent systems,
Artificial intelligence.
Abstract:
The Organic Computing initiative uses life-like properties such as self-organisation, self-optimisation and self-
configuration towards building today’s technical systems as flexible, robust, and adaptive systems. In a previ-
ous paper, we proposed a system for coordinating semi-autonomous agents under the framework of Organic
Computing. It uses abstractions of observer and controller to add robustness and solve scheduling/allocation
problems. In this context, the path planning and the observation of the agents were presented and also the
detection of deviations in different situations was discussed. In this paper, we introduce control features of
the system designed to deal with these types of deviations. That leads in turn to intervene in time when it is
necessary, so that the system remains demonstrating robustness. Furthermore, this paper addresses the con-
flict between a central planning algorithm and the autonomy of the agents. A hybrid central/self-organizing
multi-agent system is introduced solving this conflict.
1 INTRODUCTION
The behavioural intelligence can be seen as a mix-
ture of flexibility, robustness and adaptiveness of be-
haviour. This mixture is however the key idea of de-
veloping today’s technical systems which use the Or-
ganic Computing (OC) concept. The Organic Com-
puting initiative uses life-like properties such as self-
organisation, self-optimisation and self-configuration
towards building those systems as flexible, robust, and
adaptive systems.
Robust system shall behave or act appropriately
according to situational needs. But this is not guar-
anteed in novel systems which have their complexity
and whose environment is changing dynamically, be-
cause that leads to unexpected system behaviour.
Because environments of complex systems may
change dynamically, self-organising systems should
be provided with some degrees of autonomy so that
they can adapt their behaviour to new environmental
situations. This autonomy as well as errors, distur-
bances and deviations may cause an unwanted emer-
gent behaviour (Mnif et al., 2007). Therefore, the sys-
tem should be observed (e.g., by an Observer) and
controlled (e.g., by a Controller) so that this emer-
gent behaviour can be prevented and the system per-
formance remains effective as long as possible. A
generic Observer/Controller (O/C) architecture has
been proposed in (Richter et al., 2006) in order to
establish the controlled self-organisation in technical
systems. Figure 1 shows a generic o/c architecture.
As depicted in Figure 1 the behaviour of the techni-
Figure 1: Observer/Controller architecture.
cal system can be evaluated to intervene in time when
it is necessary. The o/c architecture has a set of sen-
sors and actuators to measure system variables and
influence the system. The observer observes the sys-
tem state and its dynamics, quantifies them and ag-
gregates its observations as a vector of situation pa-
rameters. These parameters are then sent to the con-
troller. The controller evaluates the situation parame-
341
Chaaban Y., Hähner J. and Müller-Schloer C. (2010).
TOWARDS ROBUST HYBRID CENTRAL/SELF-ORGANIZING MULTI-AGENT SYSTEMS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 341-346
DOI: 10.5220/0002761003410346
Copyright
c
SciTePress

ters and influences the system under observation and
control (SuOC) with respect to the given goal by the
user. In previous paper, we proposed a system for
coordinating cars at intersections using an o/c archi-
tecture (Chaaban et al., 2009). The traffic intersection
is regulated by a controller, instead of having a traffic
light. The cars send messages (requests) to the inter-
section (path planning unit of the controller) and then
get appropriate trajectories. These trajectories guar-
antee a coordinated behaviour with the other cars in
order to avoid traffic jams in the centre of the inter-
section. Figure 2 shows a screenshot from our project.
In that earlier paper, we focused on the path planning
Figure 2: The intersection without traffic lights.
and the observation of the agents and also the detec-
tion of deviations in different situations.
In this paper, we describe the control process of
the system designed to deal with these types of devia-
tions. That leads in turn to intervene in time when it is
necessary, so that the system remains demonstrating
robustness. This control process depends on our hy-
brid central/self-organizing concept, which solves the
conflict between a central planning algorithm (path
planning in the traffic intersection) and the autonomy
(deviations from the plan) of the agents.
The scenario of traffic intersection offers a lot of
cases that can be used to verify the new investigated
concept. In this scenario, a resource sharing problem
(resource sharing conflict) arises which has to be re-
solved in order to avoid collisions in the centre of the
intersection (a shared resource). In this context, the
hybrid central/self-organizing concept is used to solve
this coordination problem. It aims to keep the inter-
section robust when deviations occur in the behaviour
of the cars, so that the cars can move reliably in their
environment.
2 THE ORIGINAL SYSTEM
Previously, we proposed a new multi-agent approach
which deals with the problem occurring in the sys-
tem wherever multiple agents (cars) move in a com-
mon environment (intersection without traffic lights).
We presented the desired system architecture together
with the technique that is to be used to cope with this
problem. This architecture was an o/c architecture
adapted to the scenario of traffic intersection.
The system under observation (cars within the
centre of the intersection) is considered as a set of el-
ements possessing certain attributes in terms of multi-
agent systems. This means that every car in the sys-
tem is an agent. Every car by itself is assumed to be
egoistic (because the driver here is autonomous and
he tries quickly to cross the intersection and perhaps
he does not obey his trajectory). Therefore compe-
tition situations arise due to the egoistic behaviour
(competition-based behaviour) of cars, which in turn
leads to a traffic jam in the centre of the intersection.
2.1 Path Planning
Path planning delivers collision-free trajectories for
all cars. Path planning has to be done only for cars
inside the centre of the intersection. A car outside the
centre of the intersection has only local rules, through
which this car tries to move forward avoiding colli-
sions with other cars.
When a car arrives at a border of the centre of the
intersection, it sends a message (request) to the in-
tersection (path planning unit of the controller). This
message has to be responded to by the intersection
controller so that the car is being able to cross the
centre of the intersection (shared resource) safely, if
no unexpected errors occur within this process. The
path planning takes into consideration other cars and
the geometry of the intersection in the configuration
space-time. It calculates an appropriate trajectory and
sends it to that car which would be entering the cen-
tre of the intersection. Furthermore, the calculated
trajectory is stored in the memory of the trajectories.
The enquiring car gets its trajectory which guarantees
a coordinated behaviour with the other cars in order
to avoid traffic jams in the centre of the intersection.
We assume that every car obeys its trajectory. But this
is not guaranteed. Therefore the observer of the inter-
section observes whether the current travelled path of
a car in the centre of the intersection corresponds to
the planned trajectory of this car in the memory of the
trajectories. If this is not the case, then the intersec-
tion controller is informed so that it could intervene
in time if it would be important.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
342

The A*-procedure for path planning of cars is ap-
plied in three dimensional configuration time-space.
It makes an independent planning of the paths for
the individual agent (cars) in their configuration time-
spaces which extends the configuration space of the
agent by a time axis.
2.2 Observation
The observer concentrates at present only on the in-
tersection. Therefore, other observers in order to ob-
serve the agents (cars) on the way are not considered.
In the centre of the intersection every car has to
obey its trajectory as planned. Since deviations from
the planned trajectories are possible, the monitoring
is done in order to detect the deviations and to inter-
vene dynamically through re-plan trajectories of the
affected cars. The observer of the intersection aggre-
gates its observations as a vector of situation parame-
ters. These parameters are then sent to the controller.
2.3 Detection of Deviation
The observer compares the two states (should-be and
actual states) of every car in order to detect whether
any deviation from the plan occurred. When the ob-
server detects any deviation, then it has to find the
deviation class. The possible classes of deviations,
which could be detected through the observer in this
system, are: 1- Accident. 2- Autonomy. 3- Accident
and Autonomy (Chaaban et al., 2009).
3 THE HYBRID
CENTRAL/SELF-ORGANIZING
CONCEPT
The generic o/c architecture has to be customised to
different scenarios. The distribution possibilities of
the proposed architecture are varying from fully cen-
tral to fully distributed architecture (Branke et al.,
2006). The three main options to realize the generic
architecture as depicted in the Figure. 3 are:
(a) Central: One o/c for the whole system.
(b) Decentral: One o/c for each subsystem.
(c) Multi-level: One o/c for each subsystem as well as
one (or more) for the whole system.
In this paper, we are introducing the term, hybrid
central/self-organizing multi-agent system. It is a new
possibility of the distribution of the proposed archi-
tecture. The new architecture is a special form of the
fully central architecture, in which some autonomous
agents can leave the control of the fully central ar-
chitecture and also to behave in fully autonomous
way. Figure 4 shows the main idea of this hybrid
central/self-organizing concept arising from the fully
central architecture.
Figure 4: The hybrid central/self-organizing concept.
Organic Computing searches for concepts to
achieve controlled self-organisation as a new design
paradigm, which is necessary to cope with degrees of
freedom required by the process of self-organisation
(Cakar et al., 2007). The choice of the appropriate o/c
realization is a design decision that has to be done by
the developer in the design phase of the technical sys-
tem. In this work, the hybrid central/self-organizing
concept aims to increase the autonomy of agents in
the central architecture. This means, our hybrid con-
cept tolerates that some agents behave in fully au-
tonomous way in the central architecture. It solves
the conflict between a central planning algorithm and
the autonomy of the agents. Here, the autonomy is
recognized as a deviation from the plan of the central
algorithm, if the agents are not respecting this plan.
Consequently, our new concept comprises the use of
a central o/c architecture, autonomous agents and de-
viations from a central plan in order to solve coordina-
tion problems in multi-agent systems. Additionally, it
keeps the system robust when deviations occur in the
system behaviour, so that the agents of a system can
move reliably in their environment.
3.1 Decision Making
This paper focuses on the control process of the sys-
tem to deal with the occurred deviations.
The decision maker is the central part of the con-
troller. The controller uses the decision maker to take
a decision how it can intervene most suitable when it
is necessary so that the system can be influenced with
respect to the given goal by the user. The given goal
of the user in the introduced scenario of this work is
to keep the system demonstrating robustness in spite
of emergent behaviour which could be appeared in the
system, so that the agents (cars) can move reliably in
their environment in order to cross over it (intersec-
tion) quickly as soon as possible. That would be done
TOWARDS ROBUST HYBRID CENTRAL/SELF-ORGANIZING MULTI-AGENT SYSTEMS
343

Figure 3: Distribution possibilities of the generic observer/controller architecture.
in addition to get autonomous traffic as possible with
low delays. The decision maker is activated when the
controller gets the situation parameters which contain
a deviation message. On the other side, when there is
no deviation, this means that everything is as planned
and the decision maker will not be used here.
Algorithm 3.1. Overview of the controller algorithm
with the aid of the observer.
The observer calculates and checks δ:
δ ← (should-be state) XOR (actual state)
if (δ = 0) then
- there is no deviation, and everything is as
planned, and the decision maker will not be used
here.
else
while (δ 6= 0) do
- there is a deviation from the plan.
- increase the counter of the Autonomy Detec-
tor: (AD = AD + 1).
if (AD ≥ the threshold of the emergency)
then
activate the state of emergency
end if
- the observer finds the deviation class, and
send a deviation message to the controller.
- the controller reads the deviation message
and re-plans the trajectories of the affected
agents (cars), and send it to the system.
- wait for the next simulation tick.
- the observer calculates again and checks δ:
δ ← (should-be state) XOR (actual state).
end while
end if
3.2 The Controller Algorithm
See Algorithm 3.1. for an overview of how the con-
troller algorithm works and cooperates with the ob-
server. This algorithm allows the controller to inter-
vene dynamically through re-plan trajectories of the
affected agents (cars), when the observer has detected
deviations from the planned trajectories. Future work
includes further investigation on intervention tasks.
The simulation parameter AD (Autonomy Detector)
plays a major role in the decision process. AD repre-
sents the degree of the system sensitivity to the devi-
ations that occur. It can be adjusted to a certain value
according to the used scenario. E.G., when the sce-
nario is risky (e.g. cars scenario), the AD can be ad-
justed to a very low value. On the other side, the AD
can be adjusted to a higher value. When the value of
AD reaches the adjusted value (the threshold of the
emergency), the controller activates the emergency
state and also stops all agents (cars) and does not give
any new trajectories to the other agents.
4 PERFORMANCE EVALUATION
In this section, we present an initial evaluation of
our system using the model of a traffic intersection,
which was designed and described in our earlier paper
(Chaaban et al., 2009). Due to space limitations, we
include only our main result. In future work, we in-
tend to present a more complete empirical evaluation
including experiments with other metrics for estimat-
ing the overall reduction of the Performance (through-
put) of the system, in which deviations from the plan
of the controller occur.
4.1 System Performance Metrics
In our previous work (Chaaban et al., 2009), we have
measured the two fundamental performance metrics
in traffic engineering: the throughput and the latency
(the waiting time), because a high throughput and a
low latency are always needed in traffic engineering.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
344
Throughput is the total amount of cars that leaved the
intersection (simulation area) over time, whereas the
mean latency is the mean waiting time (ticks) needed
by cars to traverse the intersection.
In this paper, another metric is measured, the re-
sponse time. Response time is an important metric
for real time systems, because in these systems short
response time is required. This short response time
is required in this work, because cars approaching the
intersection need trajectories as soon as possible.
Response time is the time which takes a system
to react to a given input. The response time here is
the time between the moment when the path planning
unit in the controller of the o/c architecture gets mes-
sages (requests) from the system (cars) and the mo-
ment when it sends appropriate trajectories to the sys-
tem (cars). Thus, currently the average response time
is the average used computation time of the search for
the best appropriate trajectories of cars. In this sce-
nario, the system with the o/c architecture will pro-
vide a better system performance if the response time
is shorter.
4.2 Evaluation Scenarios
We used four different test scenarios to measure and
compare the system performance. These scenarios re-
sult from the change of values of the following two
simulation parameters. The first simulation parameter
is the maximum number of cars in each direction. The
second simulation parameter is the production rate of
cars in each direction (Traffic Level). The four differ-
ent used evaluation scenarios ensure that the system
performance in various combinations of the parameter
remains effectively. We called this four test scenarios:
(Equal-Equal), (Equal-Not Equal), (Not Equal-Equal)
and (Not Equal-Not Equal) (Chaaban et al., 2009).
4.3 First Results
Currently, the path planning of the o/c architec-
ture only has been implemented in order to deliver
collision-free trajectories for all cars. Thus, the re-
sults described here are measured assuming that no
deviations occur in the system. Recalling, that one
tick in the simulator means one time step.
Additionally, we have implemented the reserva-
tion algorithm for the trajectories of cars in two ways
trying to get better response time of the system. The
first way is ”AllTrajectoriesVector”. Here, every
cell in the intersection is an object (instance) of the
class SpaceTimePoint (x,y,time). Each trajectory in
turn is a vector. This vector contains all points (Space-
TimePoints) which represent a trajectory. Accord-
ingly, the AllTrajectoriesVector is a vector that con-
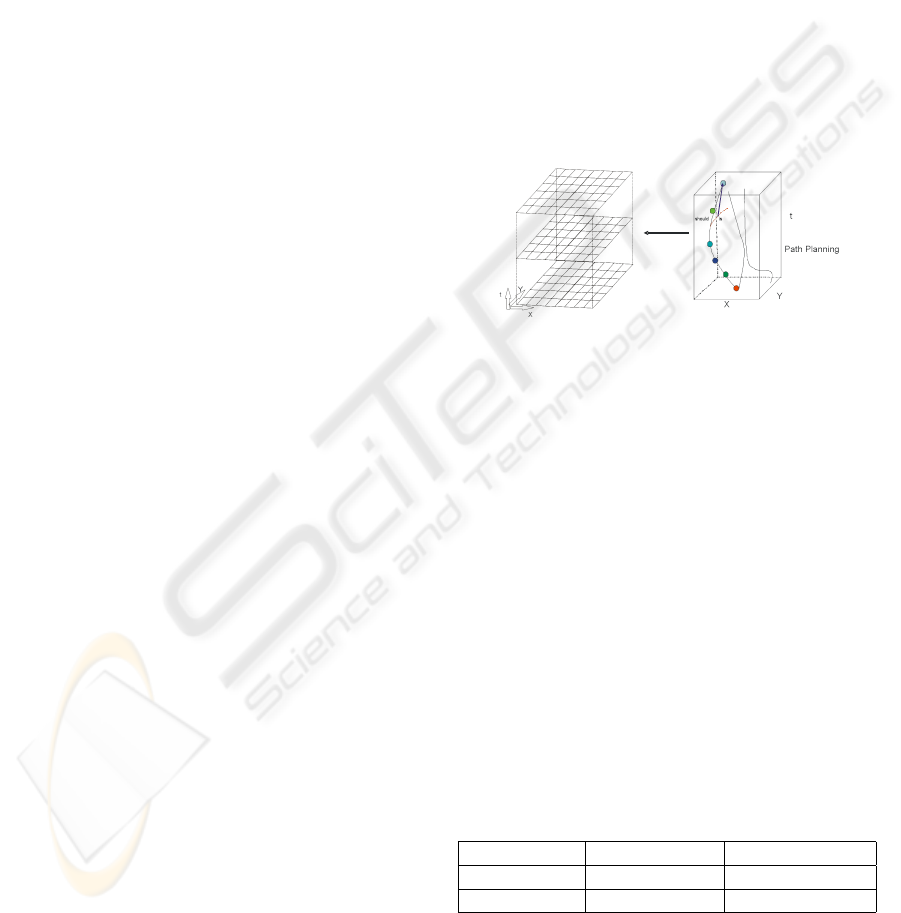
tains all trajectories of cars. The second way is ”Pho-
toOfGrid”. Here, for each tick (each unit of time) in
the simulation a photo for the whole area of the in-
tersection will be stored. Therefore, in every cell an
”AgentID” (CarID) is saved if this cell at this time (at
this tick) for this agent (car) is reserved. Each level
represents a photo of a specific tick of the simula-
tion. Thus, a photo represents the coordinates (x,y),
whereas a level represents the third axis (time), so that
the configuration time-space is formed. Each photo is
implemented as a HashMap, where the keys are the
ticks and the values are the photos:
(key, value) = (Tick, PhotoO f Grid) (1)
Figure 5 shows the structure of the PhotoOfGrid-way.
Figure 5: The structure of the PhotoOfGrid-way.
We have measured the average response time of
the system for the two reservation ways after 3000
ticks in two selected scenarios. The scenario I is a
simple scenario in terms of a small number of cars.
We have measured in scenario I the average response
time of the system in the case that traffic level of
cars in south-north and west-east directions is only
(1) cars/tick, whereas the maximum number of cars
in each direction is only (20) cars. The scenario II is a
complex scenario in terms of a large number of cars.
We have measured in scenario II the average response
time of the system in the case that traffic level of cars
in south-north and west-east directions is (4) cars/tick,
whereas the maximum number of cars in each direc-
tion is (100) cars.
Table 1 shows the resulting average response
times in the two reservation ways.
Table 1: Average response times in (ms).
Scenario I (simple case) Scenario II (complex case)
AllTrajectoriesVector 0.167 0.930
PhotoOfGrid 1.062 12.447
We can note that the second reservation way (Pho-
toOfGrid) requires about (6) times longer time than
the first reservation way (AllTrajectoriesVector) in the
scenario I, whereas it is about (13) times longer in the
TOWARDS ROBUST HYBRID CENTRAL/SELF-ORGANIZING MULTI-AGENT SYSTEMS
345

scenario II. That means, the reservation way (AllTra-
jectoriesVector) has approximately a quadratic com-
plexity, whereas the reservation way (PhotoOfGrid)
has approximately a cubic complexity, because time
is additional to the (x,y) form this 3-D configura-
tion. Since the reservation way (AllTrajectoriesVec-
tor) outperforms significantly the other reservation
way (PhotoOfGrid) by computation time in several
situations, we have further measured only the first
way (AllTrajectoriesVector).
Figure 6 shows the system performance (average
response time) for the scenario I (Equal-Equal) after
3000 ticks using the reservation method (AllTrajec-
toriesVector). We have measured in this scenario the
Figure 6: The average response time of system in scenario I
(Equal-Equal) after 3000 ticks using the reservation method
(AllTrajectoriesVector).
average response time of the system in the case that
the traffic level of cars in south-north and west-east
directions is (5) cars/tick, whereas we have repeated
the measurement in the cases that the maximum num-
ber of cars in each direction is 20, 40, 80 and 100 cars.
Note here, on the x-axis is the total amount of cars in
the two directions together. The value of the average
response time of the system in this scenario is about
(0.1) ms when the total number of cars in the two di-
rection is (40) cars, whereas about (0.83) ms by (200)
cars. This means, that the average response time of
the system increases approximately quadratically re-
quiring less that (1) ms when the total number of cars
in the two direction is (200) cars.
5 CONCLUSIONS
The choice of the appropriate o/c realization is a de-
sign decision that has to be done by the developer in
the design phase of the technical system. In this pa-
per, we presented a new approach towards building a
robust hybrid central/self-organizing multi-agent sys-
tem. This approach solves the conflict between a
central planning algorithm and the autonomy of the
agents. Additionally, it aims to increase the auton-
omy of agents in the fully central architecture. This
means, our hybrid concept tolerates that some agents
behave in fully autonomous way in the central o/c ar-
chitecture. The scenario used in this paper is a traffic
intersection without traffic lights. We introduced con-
trol features of the system designed to deal with de-
viations from the plan which can occur in the system
behaviour. These control features intend to intervene
in due time when it is necessary so that the system
remains demonstrating robustness. Finally, as evalu-
ation metric to measure the system performance, we
used the response time in four different test scenarios
in various combinations of parameters.
6 FUTURE WORK
Since we implemented the generic o/c architecture
adapted to our traffic scenario and accomplished our
experiments assuming that no deviations occur in the
system, the next step is to continue with the imple-
mentation of the case when deviations occur in the
system to completely realize our vision. Then, we
will measure the system performance and compare
the two cases, the system performance with and with-
out deviations. This comparison will be used to deter-
mine whether the system performance remains effec-
tive as long as possible when a deviation occurs and
consequently to assure a robust system.
REFERENCES
Branke, J., Mnif, M., M
¨
uller-Schloer, C., Prothmann, H.,
Richter, U., Rochner, F., and Schmeck, H. (2006).
Organic computing - addressing complexity by con-
trolled self-organization. In ISoLA, pages 185–191.
Cakar, E., Mnif, M., M
¨
uller-Schloer, C., Richter, U., and
Schmeck, H. (2007). Towards a quantitative notion of
self-organisation. In IEEE Congress on Evolutionary
Computation.
Chaaban, Y., H
¨
ahner, J., and M
¨
uller-Schloer, C. (2009). To-
wards fault-tolerant robust self-organizing multi-agent
systems in intersections without traffic lights. In Cog-
nitive09: Proceedings of The First International Con-
ference on Advanced Cognitive Technologies and Ap-
plications, November 15-20, 2009 - Athens, Greece.
IEEE, (To appear).
Mnif, M., Richter, U., Branke, J., Schmeck, H., and M
¨
uller-
Schloer, C. (2007). Measurement and control of self-
organised behaviour in robot swarms. In ARCS 2007,
volume 4415 of LNCS, pages 209–223. Springer.
Richter, U., Mnif, M., Branke, J., M
¨
uller-Schloer, C.,
and Schmeck, H. (2006). Towards a generic ob-
server/controller architecture for organic computing.
In INFORMATIK 2006. Bonner K
¨
ollen Verlag.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
346
