
COORDINATION IN OPEN AND UNSTRUCTURED INTELLIGENT
AGENT SOCIETIES
Using Distributed Planners on Top of a Semantic Overlay Network
Ant
´
onio Lu
´
ıs Lopes and Lu
´
ıs Miguel Botelho
Instituto das Telecomunicac¸
˜
oes, Av. Rovisco Pais, 1, Lisboa 1049-001, Portugal
Keywords:
Multi-agent coordination, Planning algorithms, Graphplan, Peer-to-peer networks, Semantic overlay net-
works.
Abstract:
Collaborative environments, where multiple heterogeneous agents (managing several resources) can coop-
erate in pursuing common and individual goals, are a step forward in creating real-world agent societies.
However, current research in agent negotiation and in service coordination is still not enough for building
such an agent-based society, capable of jointly solving complex planning problems and still achieve overall
good performance. Most often, current work relies on either some centralised component or pre-defined so-
cial structure, which can compromise the system in terms of scalability, openness and robustness, and fails to
address general problems. By using efficient network search algorithms and network evolution techniques it
is possible to build and maintain a semantic overlay network from a totally unstructured distributed network,
which in turn will simplify and optimize the distributed planning process amongst heterogeneous agents. We
developed distributed versions of well-known planners that operate on top of the referred semantic overlay
network and through a set of tests (using different scenarios) we were able to determine which is the best
algorithm.
1 INTRODUCTION
Our main goal is to develop a robust agent architec-
ture that enables agents to freely participate in dis-
tributed problem solving in open unstructured agent
societies. In such societies, agents receiving requests
from other agents are capable of using their own ca-
pabilities to handle the part of the problem for which
they have competence and resources, and distribute
the partially solved problem to other agents that can
possibly provide further contributions. This work
combines artificial intelligence, distributed problem
solving and peer-to-peer computing to address its two
main challenges: allow agents to partially contribute
to complex problems and to efficiently delegate un-
solved sub problems to other agents over unstructured
decentralised networks.
Cooperating in distributed problem solving re-
quires agents to be able to discover other agents to
delegate the sub problems for which they cannot con-
tribute. In previous research (Lopes and Botelho,
2008) we have shown that it is possible to improve
the resource coordination process in multi agent based
peer-to-peer networks by building, maintaining and
using a powerful semantic overlay network (Cre-
spo and Garcia-Molina, 2005) that is dynamically
learnt and updated by the discovery mechanism it-
self. The discovery and self-organisation process, in
which agents establish semantic connections amongst
them, thus fuelling the semantic overlay network, is
first carried out by using efficient and robust search
mechanisms and network evolution techniques (see
(Lopes and Botelho, 2008) for details). Once the se-
mantic overlay network is built, besides using it to
easily locate resources, agents can use it to perform
more complex tasks such as planning a solution for a
specific problem.
In this paper we focus on the planning stage, by
analysing and presenting a set of distributed planning
algorithms that can be used, on top of the semantic
overlay network, to solve planning problems in coop-
erative environments. Section 2 introduces the prob-
lem and presents related work. Section 3 describes
our approach and in section 4 we discuss tests and re-
sults. Finally, section 5 concludes the paper.
347
Luís Lopes A. and Miguel Botelho L. (2010).
COORDINATION IN OPEN AND UNSTRUCTURED INTELLIGENT AGENT SOCIETIES - Using Distributed Planners on Top of a Semantic Overlay
Network.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 347-350
DOI: 10.5220/0002761403470350
Copyright
c
SciTePress

2 MOTIVATION
A typical planner has been seen as a producer of ac-
tion sequences that requires the following inputs: (i)
an initial state of the world; (ii) a description of a
goal state; and (iii) a set of possible actions, which
can be used in the generated plan to lead the agent
from the initial state to the goal state. As the need
for more processing power (for increasingly complex
problems) arose and the inadequacy of centralised ap-
proaches became evident, researchers turned to Dis-
tributed Problem Solving. However, taking advantage
of the decentralised control of such distributed envi-
ronments requires that coordination mechanisms exist
that are able to avoid conflicts that arise from the con-
current interactions of agents, which otherwise would
result in a turmoil.
The coordination process can be undertaken at dif-
ferent times and situations, depending on what is suit-
able for the specific domain to which it applies. In
spite of the variety of approaches, domains and con-
texts, we have concluded that they have the same
kind of limitations. Whether they rely on some sort
of centralised component or on a pre-defined struc-
ture/knowledge that rules the activity of all entities
in the environment, these approaches show signs of
compromised scalability and robustness.
Most task refinement and task allocation ap-
proaches rely on centralised components, such as
blackboards (Wellman, 1993), tables of capabilities
(Fung and Chen, 2005) or broker like auctioneers
(Wellman et al., 2001). An obvious limitation of these
approaches in very large networks is its non scalabil-
ity. Other approaches (de Weerdt et al., 2007) propose
the use of social structures to govern the task alloca-
tion process, but again these have to be provided a
priori by some human user.
The same limitations apply to planning coordina-
tion. Whether coordination is performed before, dur-
ing or after planning, most approaches rely on some
pre defined structure or some centralised component
to govern the activity of the agents in the environ-
ment. Social laws (Shoham and Tennenholtz, 1992)
and other organizational based approaches (Abdallah
and Lesser, 2004) (Gaston and Desjardins, 2005) are
examples of systems where sets of rules or organiza-
tional structures are imposed to the agents societies.
Alternative approaches (Cox et al., 2003) use fully
connected networks to allow agents to know which
and when agents should be contacted. However, this
kind of network topology is very difficult to manage
in large dynamic networks where high churn rates (the
rate at which agents enter or leave a network) make
the approach non scalable. Centralisation is often the
choice for most domains, whether it is by allowing
agents to coordinate themselves through an advertis-
ing blackboard (de Weerdt and Van Der Krogt, 2002),
or by using specialised central agents to perform post-
planning coordination (Cox and Durfee, 2005).
3 TECHNICAL APPROACH
By using a matchmaking process that analyses each
agents operators and establishes links between in-
puts/outputs and pre-conditions/effects of the opera-
tions that can be done by other agents (see details in
(Lopes and Botelho, 2008)), we dynamically build a
powerful Semantic Overlay Network. This abstract
layer subsumes the discovery process of the coordi-
nation environment by helping agents find each other
based on their semantic relationships. However, for
an agent to create a plan to solve a specific problem,
it still needs a planning algorithm that is capable of
dealing with partial knowledge of the domain opera-
tors and deriving the potential contributions that can
be done by the agent to the referred problem. Our
work focuses on finding the appropriate planning al-
gorithm for this distributed environment.
We have studied several algorithms and decided
to use the well-known Graphplan planner (Blum and
Furst, 1997) because it is one of the best planning
algorithms and has been used as the basis for other
even more efficient planning algorithms. We have
created different versions of the planner so we could
test its application to different distributed problems.
In section 3.1, we present our distributed version
of the Graphplan algorithm. Section 3.2 describes
an alternative version of the distributed Graphplan
algorithm that previously builds an operators-graph
through means-ends analysis.
3.1 Distributed Graphplan
In a centralised version of the Graphplan algorithm
an agent has full knowledge of the available opera-
tors. However, in a distributed setting, each agent may
only have knowledge of its own operators and of those
of selected neighbours or, in the case of the Seman-
tic Overlay Network, of agents that are semantically-
linked to it. So, we modified the algorithm to allow
partial contributions to the creation of the planning-
graph. The process is carried out as follows:
• The agent receiving a request (which includes a
description of the initial state and the goal state)
will analyse each level and determine which of
the operators (that it knows) can contribute to the
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
348

current planning-graph (if the agent is the first re-
ceiving the request, it has to create the first propo-
sition level, which will include all propositions of
the initial state) and adds them accordingly;
• The agent further analyses open propositions (for
which it was unable to contribute) and determines
(using the Semantic Overlay Network) which are
the most adequate agents to receive this partially-
complete planning-graph;
• Each agent receiving the planning-graph will ex-
ecute these same steps up to a point where a level
in the graph is reached where all goal propositions
exist and none of which are mutex;
• Once a planning-graph reaches this desired stage,
the agent holding the planning-graph at that time
executes the backward search that will find a so-
lution plan – the agent can also request the assis-
tance of other agents in the backward search, but
each agent will use a different heuristic in the pro-
cess;
The termination of this process in a distributed en-
vironment is not trivial. In the centralised version
an agent can simply rely on the level-off property of
Graphplan
1
to conclude that the problem is impossi-
ble to solve. For an agent with only partial knowledge
of the world, it is impossible to know if a levelled-off
graph means that the problem is impossible or that
the agent simply does not have enough knowledge to
complete it. This could lead to a near-infinite pro-
cess of forwarding partially solved problems between
agents. To avoid this situation, we use a similar mech-
anism as the one used in peer-to-peer search algo-
rithms, where a time-to-live setting is used to specify
the allowed number of forwards that can be done with
a single request.
3.2 Distributed Graphplan with
Operators-Graph
In most domains, the size of the goal state is a lot
smaller than the initial state, which means that some
of the propositions contained in the initial state may
be completely irrelevant to reach the goal state. As
most forward-based planners, Graphplan suffers from
the problem of distraction, where the planner consid-
ers all propositions in the initial state even if they will
not help reach a solution plan. In fact, these unnec-
essary propositions can be very time-consuming, thus
degrading the performance of the planner. Therefore,
they should be avoided.
1
When two subsequent levels are equal and non-mutex
goal propositions have been reached yet
To cope with this problem, we have used a sim-
ilar approach to (Kambhampati et al., 1997). We
use means-ends analysis in the Graphplan algorithm,
by first producing an operators-graph (Smith and
Peot, 1996) using a backward-chaining process start-
ing from the goal state. Since it only considers the
propositions in the goal state, the operators-graph
will produce a graph with only relevant actions.
This planner uses a similar process to the one used
in the generation of the planning-graph but in a differ-
ent direction. It finds operators that can contribute to
propositions in the goal state and the pre-conditions
of those operators become the new goal propositions.
The planner proceeds with this process until it reaches
a level in which all propositions are contained in the
initial state. After the graph has been generated, the
normal forward generation of the planning-graph can
take place, except this time it will only consider the
operators that are contained in the operators-graph,
thus significantly reducing the size of the graph and
the number of calculations. The drawback is, obvi-
ously, the overhead introduced by the generation of
the operators-graph.
4 TESTS AND RESULTS
In order to test the distributed Graphplan and the
operators-graph-based version of Graphplan algo-
rithms, we deployed two different testing scenarios
but due to space limitations we will only show the re-
sults for the Rescue Agents scenario. In this scenario,
agents represent entities that participate in a rescue
operation after the occurrence of a natural disaster,
where they have to perform operations such as clear-
ing roads, putting out fires and providing assistance to
injured people. This scenario is characterized as hav-
ing a small number of different entities but with a high
degree of complexity due to the high level of interac-
tion/cooperation that is needed between the agents.
We have performed a set of preliminary tests for
this scenario using increasingly complex variations
(different number of injured people) on both algo-
rithms. As depicted in Figure 1, the results show that
the operators-graph-based version of the distributed
Graphplan algorithm is more scalable than the dis-
tributed Graphplan algorithm. This is strongly linked
to the fact that for more complex or large problems,
the means-ends analysis is effective in reducing the
search scope of the planner, in spite of the introduced
overhead.
COORDINATION IN OPEN AND UNSTRUCTURED INTELLIGENT AGENT SOCIETIES - Using Distributed Planners
on Top of a Semantic Overlay Network
349
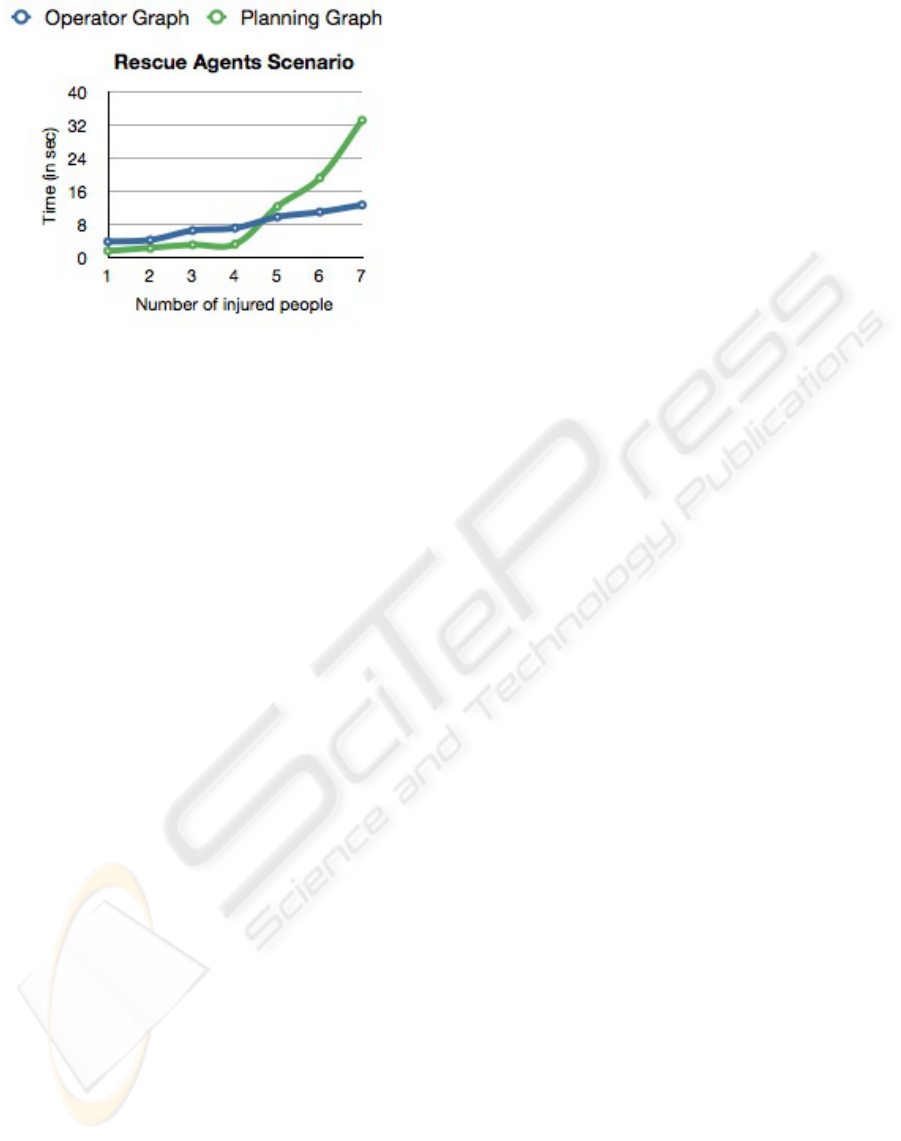
Figure 1: Comparison between Graphplan and Operator-
graph-based Graphplan in the Rescue Agents scenario
5 CONCLUSIONS AND FUTURE
WORK
In this paper we have described the approach taken in
a cooperative planning environment, where we have
deployed a distributed network of problem solving
agents by using a Semantic Overlay Network and dis-
tributed Graphplan-based algorithms. Preliminary re-
sults show that the approach can be considered scal-
able and efficient. The results are still preliminary and
we intend to perform a more thorough analysis of the
testing scenarios and include other scenarios to ad-
dress the robustness of the approach in a large variety
of problems.
ACKNOWLEDGEMENTS
This work has been supported in part by the Por-
tuguese Foundation for Science and Technology un-
der the scholarship grant SFRH/BD/27533/2006. The
authors would also like to thank the support of
the Lisbon University Institute and the Instituto de
Telecomunicac¸
˜
oes (IT).
REFERENCES
Abdallah, S. and Lesser, V. (2004). Organization-based co-
operative coalition formation. In Proceedings of the
IEEE/WIC/ACM Int. Conf. on Intelligent Agent Tech-
nology, pages 162–168.
Blum, A. and Furst, M. (1997). Fast planning through
planning graph analysis. Artificial intelligence, 90(1-
2):281–300.
Cox, J. and Durfee, E. (2005). An efficient algorithm for
multiagent plan coordination. In Proceedings of the
4th Int. Joint Conf. on Autonomous Agents and Multi-
agent Systems, pages 828–835. ACM New York, NY,
USA.
Cox, M., Elahi, M., and Cleereman, K. (2003). A
distributed planning approach using multiagent goal
transformations. In Proceedings of the 14th Midwest
Artificial Intelligence and Cognitive Science Confer-
ence, pages 18–23.
Crespo, A. and Garcia-Molina, H. (2005). Semantic overlay
networks for p2p systems. In Proceedings of the 3rd
Int. Workshop on Agents and Peer-to-Peer Computing,
page 1, New York, NY, USA. Springer.
de Weerdt, M. and Van Der Krogt, R. (2002). A method
to integrate planning and coordination. Planning with
and for Multi-Agent Systems, pages 83–88.
de Weerdt, M., Zhang, Y., and Klos, T. (2007). Distributed
task allocation in social networks. In Proceedings of
the 6th Int. Joint Conf. on Autonomous Agents and
Multiagent Systems. ACM New York, NY, USA.
Fung, R. and Chen, T. (2005). A multiagent supply
chain planning and coordination architecture. Interna-
tional Journal of Advanced Manufacturing Technol-
ogy, 25(7–8):811–819.
Gaston, M. and Desjardins, M. (2005). Agent-organized
networks for dynamic team formation. In Proceed-
ings of the 4th Int. Joint Conf. on Autonomous agents
and multiagent systemsnternational joint conference
on Autonomous Agents and Multiagent Systems, pages
230–237. ACM New York, NY, USA.
Kambhampati, S., Parker, E., and Lambrecht, E. (1997).
Understanding and extending graphplan. In Pro-
ceedings of the 4th European Conference on Plan-
ning: Recent Advances in AI Planning, pages 260–
272. Springer-Verlag London, UK.
Lopes, A. and Botelho, L. (2008). Improving multi-agent
based resource coordination in peer-to- peer networks.
Journal of Networks, 3(2):38–47.
Shoham, Y. and Tennenholtz, M. (1992). On the synthesis
of useful social laws for artificial agent societies. In
Proceedings of the National Conference on Artificial
Intelligence, pages 276–276.
Smith, D. and Peot, M. (1996). Suspending recursion in
causal-link planning. In Proceedings of the 3rd Int.
Conf. on Artificial Intelligence Planning Systems.
Wellman, M. (1993). A market-oriented programming envi-
ronment and its application to distributed multi com-
modity flow problems. Journal of Artificial Intelli-
gence Research, 1(1):1–23.
Wellman, M., Walsh, W., Wurman, P., and MacKie-
Mason, J. (2001). Auction protocols for decentralized
scheduling. Games and Economic Behavior, 35(1-
2):271–303.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
350
