
IMPROVED KERNEL BASED TRACKING FOR FAST MOVING
OBJECT
Dang Xiaoyan, Yao Anbang, Wang Wei, Zhang Ya, Wang Zhuo
Intel Labs China, 8f Raycom Infotech Park A, 2th Kexueyuan South Road, Beijing, China
Wang Zhihua
Micro Electronic Institution, Tsinghua University, Beijing, China
Keywords: Object Tracking, Kernel Based Tracking, Foreground/ Background Modelling.
Abstract: A novel approach of discriminative object representation and multiple-kernel tracking is proposed. We first
employ a discriminative object representation, which introduces the foreground and background modelling
ingredient to select the most discriminative features from a set of candidates via classification procedure. In
the context of using kernel based tracking algorithm, a multiple-kernel strategy is employed to handle the
difficulties resulted from fast motion through refining the ill-initialization position according to pre-
refinement method. Extensive experiments demonstrate that the proposed tracker works better than
Camshift and traditional kernel tracker.
1 INTRODUCTION
Real time object tracking is a critical task in many
computer vision based applications such as
surveillance, perceptual user interfaces, augmented
reality, smart rooms, video compression and driver
assistance in (Dorin, 2003) (Klaus, 2001), (Faith,
2005), (Hanger, 2004), (Ahmed, 2002) and
(Arulampalam, 2002). Compared with other
commonly used approaches like particle filter by
(Arulampalam, 2002), kernel based method by
(Dorin, 2003) and (Klaus, 2001) have gained more
and more attention mainly due to its low
computation cost, easy implementation and
competitive performance.
Given an object of interest in the previous
frames, the problem of object tracking is to precisely
label the object locations in the remained frames. In
kernel based tracking method, the target model is
represented as a kernel weighted color histogram. As
for object location, it is iteratively obtained through
mean shift and gradient decent techniques. However,
kernel based tracking faces the problem of how to
design appropriate kernel for adapting complex
object appearance changes, 3-D rotations and object
deformations. Additionaly, it strictly depends on the
assumption that object regions overlap between the
consecutive frames. That means kernel based
tracking will completely fail when the object moves
too fast or video is sampled in very low frame rate
(Faith, 2005) because these usually result in little or
no overlapped regions in consecutive frames.
Reference (Faith, 2005) proposed the multi-kernel
tracking method to resolve this problem. Even
though the tracking performance is improved, their
approach imposes much more computation burden
in the iterative procedure. (Hanger, 2004) tried to
resolve this problem by replacing the Bhattacharyya
coefficients with Matusita metric, which could better
resolve the problem in math.
In order to achieve robust tracking under difficult
scenarios (e.g. cluttered background, fast moving)
with moderately low computation cost, we introduce
a discriminative multiple kernel tracking method.
First we introduce discriminative linear color feature
to represent the object of interest, which works well
under background clutter situation and further
suppresses the object from drifting into wrong area
when the background is similar to the object. Second
we introduce an efficient two-step multiple-kernel
tracking method instead of the baseline kernel
tracking method (Klaus, 2001) to handle fast moving
cases, where the first step is trying to correct the
insufficient initial location for kernel tracking and
261
Xiaoyan D., Anbang Y., Wei W., Ya Z., Zhuo W. and Zhihua W. (2010).
IMPROVED KERNEL BASED TRACKING FOR FAST MOVING OBJECT.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 261-266
DOI: 10.5220/0002766902610266
Copyright
c
SciTePress

the second step is employed to estimate object
location through mean shift iteration. The proposed
method introduces negligible computation cost into
the system but resolves the quick moving problem
with favorable performance.
This paper is organized as follows: section 2
describes the discriminative object representation
method; section 3 deals with the selective kernel
based tracking. Section 4 gives the experimental
results. Section 5 illustrates some discussion topic,
and section 6 concludes our article.
2 OBJECT REPRESENTATION
Traditional kernel tracking like (Klaus, 2001) uses
discrete color distribution as the target
representation. For example, discrete RGB or YUV
color distribution of target at location y is
represented as p(y), and then transformed into m-bin
histograms:
Target model:
1...
m
u-1
ˆˆ
{} , 1
ˆ
um
uu
qq q
(1)
However, only simple color representation of
object is not discriminative enough, background
information shows its importance for several
reasons. First, some of the target features also
present in the background, their relevance for the
localization of the target is diminished. Second, in
many cases, target model always contains
background features. The traditional simple m-bin
color histogram representation fails under these
conditions.
Inspired by (Ahmed, 2002) and treating object
representation as a regional detection problem, we
propose a discriminative combined color feature.
Based on the assumption that the background close
to the target has the biggest influence to target
representation, we only introduce this salient area
into our representation. We search in the sub-space
of RGB space to find the most discriminative
combination of RGB information.
2.1 Foreground and Background
Region Selection
Suppose we already select object initialized with a
manual labeled rectangle region, we only need to
determine the correlated background region. Since
kernel based tracking algorithm has limited
operational basin, we choose the background as the
region of baseline kernel tracker’s operational basin,
which is the double area of target. An illustrative
sample image is shown in Fig.1.
Figure 1: Object/background area sampling, inner
rectangle is object area, outer rectangle is background
edge.
As we can see in Fig.1, the red rectangle area
minus the magenta rectangle area is the background
area. We try to find a cluster of RGB sub-space to
best discriminative target from background.
2.2 RGB Sub-space Selection
In tracking tasks, pure RGB pdf could not always
perform well in the situations of illumination
changes and background clutter. To this problem, its
linear combination sub-spaces may have better
performance.
We randomly generate a cluster of linear
combination of RGB information, and try to find the
best ones among them.
The whole procedure is as follows:
Randomly generate feature set coefficients;
Where
α
i
,
β
i
,
γ
i
are the coefficients for the ith
linear combination space and M is the number of
spaces, normally, we generate about 20-30
feature sets.
1,...
{, ,} , , ,
iiii M ii
(2)
Generate feature sets according to (3) with
coefficient selected from (2): i.e. weighing RGB
color components with different coefficients.
Here
x is the 2-D location of one pixel in image.
These features are normalized to [0, 255].
ii i i
f
xRxGxBx
(3)
Finally, we map histograms of object and
background region in each feature space as
h(o)
i
={h(o)
i,j
}for object region, h(b)
i
={ h(b)
i,j
}
for background region,
i=1,2…M, j=1,2…N.
Here
N is the bin number of histogram.
Fig.2 shows examples of image transformed into
feature space.
Based on the described process, we selected the
most discriminative features, and map the whole
image into the selected feature space.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
262

Figure 2: Several sample images in feature space.
2.3 Feature Selection Base on Fisher
Measure
With the selected M feature spaces, we try to find
the one who can best discriminate the object of
interest from the background. Based on Fisher-
criterion, we formulate the foreground-to-
background log likelihood distribution as
,
1
,
max ,1 6
ln
max ,1 6
N
ij
i
j
ij
hoe
l
hbe
(4)
Here
,ij
ho and
,ij
hbis the histogram of jth
bin in ith feature space for object and background.
We then evaluate the discriminative ability of
each feature with the log likelihood distribution in
(4). Since larger li in (4) corresponds to higher
h(o)
i
and lower h(b)
i
, which means lower discriminative
ability. Based on the
l
i
values, we can order the M
space in descending discriminative ability, and select
the best
J features for object representation with the
highest
l value.
a) b)
c) d)
Figure 3: Four sample observation likelihood images
mapped from different feature images sorted in
discriminative ability descending order.
We show 4 discriminative images with the best
discriminative ability in Fig.3.
From Fig.3, we can find that different linear
combination of color information has different
discriminative ability. For example, in image a) the
object in the inner rectangle is almost totally white,
and the selected background is almost all black,
which means feature set in a) has the best
discriminative ability.
2.4 Discriminative Combination Color
Descriptor
After we made the decision of the J linear
combinations, we concatenate the
J histograms
generated from the
J selected spaces to form our
discriminative linear color feature.
Define
⊕ as the operator of concatenate two
vector, we generate final feature according to (5).
12
...
J
hh h h
(5)
This discriminative combination of color feature
introduces background influence into the selection
of feature generation, and selects the best
discriminative linear descriptor in RGB sub-spaces,
which is totally different from the traditional way
like (Klaus, 2001) and (Faith, 2005). Experiment
results show it could perform better in cluttered
background, illumination change and appearance
variation which are normal in real applications.
3 AMENDED KERNEL OBJECT
LOCALIZATION
In real applications, the object usually undergoes
unpredictable movements, e.g. quick move, outburst
direction change. However, traditional kernel
tracking method like (Klaus, 2001) strictly depends
on the assumption that object regions overlap
between the consecutive frames. That is, it will fail
under these unpredictable fast movement situations.
To handle this problem with little computation
cost burden, we suggest an initialization position
refinement + kernel tracking method, where the ill-
conditioned convergence of kernel based iteration is
moderately suppressed to get better result with low
computation cost.
3.1 Refinement of Initialization
Position
The basic idea of our approach is to reallocate the
initial object position in the true target centered
IMPROVED KERNEL BASED TRACKING FOR FAST MOVING OBJECT
263

region via quickly estimating an observation
likelihood surface against target model. That is, the
initial object position should be located in the true
target region.
3.1.1 Multiple Initialization Position
Selection
If we define quick movement as the objects in
consecutive frames do not overlap, then quick
movement is high dependent on the size of the
object. The smaller the object is, the more possible it
moves too fast to track.
Based on this assumption, the locations where
we put our multiple initialization positions are
decided using piecewise linear function
f(x)
dependent to the size (x, y) of the object.
, 0<x 10
/ 2, 10<x 20
_.
/ 3, 30<x 40
/ 4, x>40
x
x
mstepx
x
x
(6)
Here
x is vertical size and y is horizontal size.
The same strategy is used on vertical axis
y as (6).
We put the
×
K
K locations according to (6). Fig.4
shows some examples of the multiple locations.
a) b)
Figure 4: Illustration of multiple initialization strategy.
In Fig.4 the dark-blue rectangle defines the
object and the background, while the light-blue
circles denote the candidate multiple initialization
positions, while red-color circle indicates the current
target center.
We can see from Fig.4 that object in a) and b) are
different, and the step for a) and b) is different due
to the relationship defined in (6). The step when
selecting the multiple positions is highly dependent
with the object size, which is due to the relationship
between quick motion definition and object size.
3.1.2 Refinement of Initialization Position
Based on the selected location surface, we conduct a
refinement process before kernel based tracking to
select a modified kernel initialization position.
Partition the region of observation likelihood
surface into
×
K
K sub-regions.
For each sub-region, a Gaussian formed
stochastic sampling is employed to generate the
candidate position of each sub-region.
Generate the histogram of each candidate sub-
region.
Measure the similarity between target model and
each candidate histogram, and choose the
candidate with largest similarity as refined initial
object position. The histogram distance measure
we used is Bhattacharyya coefficient.
If the largest similarity
M
f
and the second
largest similarity
M
s
are very close to each other, a
weighted procedure is used.
M
fMf MsMs
Mf Ms
x
x
x
(7)
Where
M
f
x
and
M
s
x
are the candidate positions
and
x is the final decided initialization position.
3.2 Kernel Function
With the modified initialization position, a baseline
kernel tracking is employed. In our algorithm, we
use
Epanechnikov profile:
1
1
(2)(1), 1
()
2
0, otherwise
d
Cd xifx
kx
(8)
Although we have other choices of kernel like
roof kernel in (Hanger, 2004), we choose
Epanechnikov kernel and Bhattacharyya distance
measure for the convenience of comparison.
4 EXPERIMENTAL RESULT
To show the performance of the proposed tracking
approach, we compare it with Camshift, and baseline
kernel based tracker. In the experiments, the
scenarios of object fast movement, rapid camera
motion and object appearance change are
considered. As for tracking accuracy, it is represent
as the error between the estimated object positions
and manual labeled ground truth.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
264
4.1 Comparison Under Fast Object
Motion
In the first experiment, fast object movement is
considered. The video sequence, which is recorded
with a Logitech Tessa 2.0 camera, has 450 frames.
In this video, the aimed glass undergoes normal
speed motion in the first 250 frames and moves with
a quick unpredictable speed in the remained frames.
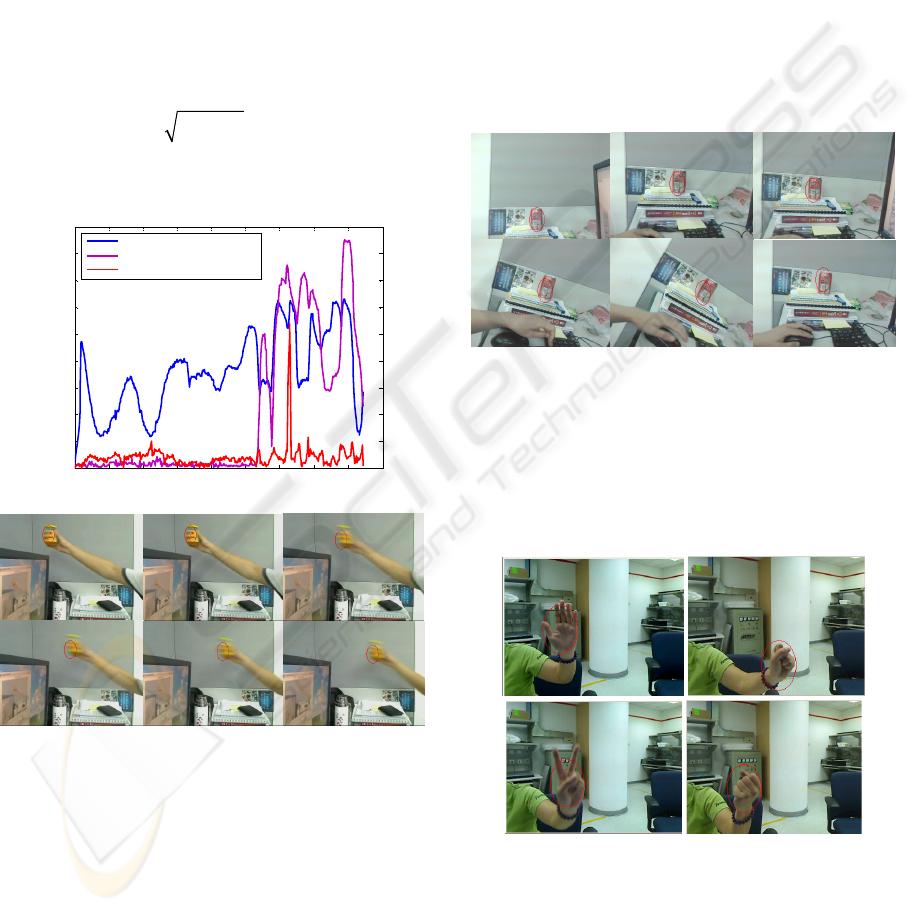
The tracking error curves of our approach,
Camshift and kernel based tracker are shown in
Fig.5 a). Some example tracking frames of our
approach are given in Fig. 5 b).
The tracking error e is defined in (9)
22
x
y
eee
(9)
Where
e
x
is the pixel error in horizontal axis x,
and
e
y
is the pixel error in vertical axis y.
0 50 100 150 200 250 300 350 400 450
0
20
40
60
80
100
120
140
160
180
Frame Index
Tracking Error / Pixel
Camshift Tracking
Baseline Kernel Tracking
Discriminative Kernel Tracking
a) Tracking accuracy.
b) The frame indexes are 385,386, 387, 388,389 and 390
respectively.
Figure 5: Comparison of tracking accuracy.
We can find from Fig.5 a) that the proposed
algorithm works well both at normal motion speed
and quick motion speed. Camshift works worst
under both situations. Baseline Kernel tracker works
well under normal motion speed, but it fails to track
the object in the frames of quick motion. In general,
the proposed algorithm exhibits the enhanced
tracking capability in handling the difficulties
resulted from rapid object motion.
4.2 Tracking Under Different
Situations
4.2.1 Rapid Camera Motion
The second experiment is mainly focused on rapid
camera motion. In contrast with fast object motion,
when the camera is not static, the background scene
will change and the field of view will also vary. As a
result, the tracking task becomes difficult. Fig 6
illustrates some representative tracking frames of
our approach. Here, we want to point out that these
frames are collected from real-time processing
environment where camera moves rapidly but object
is still.
Figure 6: Tracking results of successive frames under
camera rapid motion.
It can be seen from Fig.6 that our proposed
approach can also deal with the rapid camera
movement in an effective way.
4.2.2 Object Appearance Change
Figure 7: Tracking result under different hand posture.
The third experiment is implemented on a hand
video sequence in which the hand changes in its
appearance and pose. In addition, background is
complex. Fig.7 indicates with some tracking frames
of our approach.
IMPROVED KERNEL BASED TRACKING FOR FAST MOVING OBJECT
265

It can be seen from Fig.7 that the proposed
approach also shows good ability to adapting to
hand appearance and pose changes.
4.2.3 Tracking in Low Frame Rate
The fourth experiment is implemented on a down-
sampled outdoor pedestrain video sequence, which
contains typical fast object motion due to low
sample rate as in (Faith, 2005). Fig 8 indicates with
some tracking frames of our approach.
Figure 8: Tracking results of successive frames under low
sample rate (frame # 94, 95, 142, and 143).
In Fig.8, the outdoor pedestrian video is down-
sampled like (Faith, 2005), which contains typical
rapid motion. We can see that the objects in
consecutive frames 94 and 95 have no overlap, and
so do frame 142 and 143. The proposed algorithm
works well on this dramatically rapid motion video.
Notice that the distance of consecutive object is
comparatively bigger in the scenario, which is
caused by the heavy down-sampling for testing.
5 DISCUSSION
Rapid movement of object using normal camera
always accompanies with motion blur of image,
which will result in the color drift and content
degeneracy of the image due to long exposal time.
That is, object appearance will be deformed or
blurred under fast motion. Here, it should be pointed
out that sample images in Fig.5 b) show that the
proposed algorithm works well in above situations.
Based on the description of amending strategy in
part 2 and 3, the extra computation cost of
discriminative linear color feature and pre-
refinement strategy before kernel tracking is
moderately low, and hence the proposed tracking
algorithm can be used in real-time tracking tasks
unlike the works of (Faith, 2005) and (Arulampalam,
2002).
Proposed method uses a pre-refinement method
to modify the ill-conditioned initialization position
before kernel tracker, which is somewhat a fake
multiple-kernel strategy. It is similar but different
with (Faith, 2005) for we resolve using pre-
processing with low computation cost and (Faith,
2005) use real multiple-kernel and post fusion of
multiple position with high computation cost.
6 CONCLUSIONS
In this paper, we propose an efficiently
discriminative combination of color feature for
tracking problem, which introduces foreground /
background classification idea into object
representation. Also we propose a low-cost pre-
refinement method to better resolve the ill-
initialization problem of kernel tracker, which could
enhance the performance of kernel tracker under
object rapid motion. With respect to experiment
results, our proposed representation and multiple
kernel strategy works better than popularly used
Camshift and BKT under quick motion situation. It
also partly diminishes the effect of background
cluster and illumination change’s influence on
tracking result.
REFERENCES
Dorin Comaniciu, Visvanathan Ramesh, Peter Meer, 2003.
Kernel-Based Object Tracking, IEEE transaction on
Pattern Analysis and Machine Intelligence, Vol 25,
Issue 5, pp. 564-577.
Klaus Robert Muller, Sebastian Mka, Gunnar Ratsch,
2001. An Introduction to Kernel Based Learning
Algorithms, IEEE Transactions on Neural Networks,
Vol 12, No 2, pp. 181-201.
Faith Porikli, Oncel Tuzel. 2005. Multi-Kernel Object
Tracking, ICME, pp. 1234-1237.
Hanger G D, Dewan M. 2004. Multiple Kernel Tracking
with SSD, Proc. CVPR. Vol.1, pp. 790-797.
Ahmed Elgammal, Ramani Duraiswami, David Harwood.
2002. Background and Foreground Modeling using
nonparametric kernel density estimation for visual
surveillance. Proceedings of the IEEE , Vol 90, Issue
7, pp. 1151-1163.
Arulampalam, M. S. Maskell, S. Gordon. 2002. A tutorial
on particle filters for online nonlinear/non-Gaussian
Bayesian tracking. IEEE Transaction on Signal
Processing. Vol 50, No 2, pp. 174-188.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
266
