
DEVELOPING AN ARCHITECTURE OF GAMES
FOR A BLUETOOTH-BASED UBIQUITOUS ENVIRONMENT
José Miguel Rubio, Francisco Reyes and Jorge Inostroza
Pontificia Universidad Católica de Valparaíso, Av. Brasil 2241, Valparaíso, Chile
Keywords: Mobile technology, PDA, Smartphones, Cell phones, Videogame, Communication, Architecture,
Ubiquitous environment, Bluetooth.
Abstract: Mobile technology is in an increasingly competitive market, and mobile devices, of various ranges and
technologies such as PDAs, smartphones, cell phones, among others are their representatives, offering a
wealth of services and resources to use.
As it grows, the development of these devices and their processing and storage capabilities also increases
the production of larger applications that exploit these capabilities. This is where the mobile gaming market
appears. However due these devices are in a variety of ranges, operating systems and implementations, it
creates a problem in game development area because of the lack of uniformity and consistency in the
communication between devices.
This article proposes an architecture model game under a ubiquitous environment for mobile devices,
primarily focused on the communication of these devices using the Bluetooth protocol with the aim of
standardizing applications for different platforms and devices providing support to developers of video
games.
1 INTRODUCTION
Mobile technology is advancing very fast and with it
the market for mobile devices. A big number of
applications and operating systems for these devices
have been developed over this last period, more and
more powerful applications that use these resources
have evolved in parallel excels the video game
market, which in the beginning marked a fashion
with game consoles, computers and laptops, but at
this period has also migrated to mobile devices
exploiting their resources, regardless of whether they
are classified as limited. Mobile games have evolved
and equally so have the requirements of demanding
users in this field, which is why players and are
unsatisfied when they interacting with their devices,
now they are looking to interact with other players
and measured with them in playing scenarios
through a connectivity medium. This presents a
great challenge for game developers because of the
huge range of devices on the market. Consequently
the development of video games for multiple mobile
platforms has been a constant dilemma.
Because of the problems mentioned in this
article defines an architectural model of video games
that will solve this dilemma, integrating the essential
requirements of game development, and standardize
the components and technologies for communication
between mobile devices that are developed for
platform multiplayer.
2 UBIQUITOUS ARCHITECTURE
OF GAMES
This section aims to introduce the definition of a
gaming architecture under a ubiquitous environment
(Weiser 2001), where mobile devices to interact in
games multiplayer platform game. Before defining
an architecture as such is necessary to define its
functionality and features that this architecture must
meet. The following describes the main features and
technical specifications set by this architectural
model.
2.1 Communication
Communication is the focus of this article and turn
the main body of the proposed architecture model.
191
Miguel Rubio J., Reyes F. and Inostroza J.
DEVELOPING AN ARCHITECTURE OF GAMES FOR A BLUETOOTH-BASED UBIQUITOUS ENVIRONMENT.
DOI: 10.5220/0002808801910194
In Proceedings of the 6th International Conference on Web Information Systems and Technology (WEBIST 2010), page
ISBN: 978-989-674-025-2
Copyright
c
2010 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

This feature is the configuration and deployment of
technologies of communication between different
mobile devices to interact in a ring game.
Arrange and specify the protocols by which devices
should connect and share common services.
2.2 Processing
Another feature is that the architecture will provide a
module dedicated to processing information wich is
transmitted by the devices.
Represents the core of the architecture and is
responsible for the overall configuration of each one
of the components that interact in the architecture.
Its goal is to generate direct communication with the
videogame in development code and the modules of
the architecture.
That is the request shall be sent
from the game parameters to the modules of the
architecture while sending the response to the logic
of the game.
Within its submodules processing module will
incorporate features that will be present in each of
the modules and be responsible for transferring data
between modules and the videogame code.
2.3 Persistence
Another feature of the architecture is the persistent
storage of the information for the items of the
videogame. In this case the persistence can be
established in two ways: internally or externally.
Internal if the information will remain in the internal
memory or ROM device, or external if the user plans
to store the information on an external server to the
device and can connect to a database and hosted on a
computer or use web services to store information
on the games.
The information will this functionality is directly
related to the logic of the games, ie record of scores,
statistics time items, the possibility, animations,
settings, characters, audio, video, etc.
2.4 Logic
An important feature also is that which relates to the
encoding logic games, this means the management
and control of major characteristics that have the
games and in turn differ from each other.
An important point in this module is the creation of
different Artifical Inteligence(AI) techniques that
provide direct support to game developers and the
grouping of modules focused on the different
categories that have the games.
(Games of strategy,
shooting, role, etc).
2.5 Security
Finally, the architecture will have a functionality
responsible for the security of the transfer of
information for the items in game, very similar as in
most applications security vulnerabilities are always
present, is why this module should responsible for
solving these problems through security algorithms
for different types of games that want to develop.
The module will include features for creating session
for the items in the game, asking the user ID and
password as previously registered when creating the
game, this data should have encryption systems
acceptable to establish safe playing games.
These features listed in most cases will depend on
each other, which means it will generate some
dependency between modules, which is why
development should be highly modular.
After defining the main problems in game
development, and exposed the features that can fill
them, this architecture is defined as a set of packages
containers for code libraries, grouped by features
with the aim of providing support in developing
uniform videogames.
The figure below sets out the package module
architecture, where processing package figure as the
central entity responsible for communicating with
other modules and receive requests from the game
code to return them to these modules.
Figure 1: Architecture Package Diagram.
WEBIST 2010 - 6th International Conference on Web Information Systems and Technologies
192

3 STATIC VIEW
One goal of this architecture is to give the possibility
to extend functionality of existing components and
extend its capabilities after the creation of new ones,
this is why modules are designed with specific
functionalities and black boxes to make this happen.
Each module will have a class called Manager to
process the information and transmit it to the
processing module which will also feature a central
manager, so this way the processor will play a rol
enabling communication between modules .
For the creation of new components within the
architecture of each module will be
called Driver classes that extend from the entities
manager, and will keep the intention of
implementing specific functions associated with
each module.
The drivers should have implemented the extended
methods to work properly, because the drivers are
loaded by the processor and used to make calls to
abstract methods of the manager.
3.1 Bluetooth Driver
After extending CommunicationManager, it
implements the functionality of the bluetooth
technology through a class called
BluetoothDriver.
This implementation addresses all
the methods offered by the abstract class
CommunicationManager.
BluetoothDriver functions are based on client-server
architecture.
Bluetooth protocols implemented for
data transfer are RFCOMM and L2CAP (Brieva
2004). To have better control over the game session,
was created interface GetClientListener, the class
that implements this interface will be who controls
events arrivals of new players to games, and will
achieve a higher order process when new players to
the meeting.
4 DINAMIC VIEW
4.1 Coordination in the Searching for
Devices and Services
The implementation of the Bluetooth standard works
on the concept of mutual exclusion when seeking
services or devices, providing blocking methods,
this in order to provide better control over the work
of searching and have the operation bounded,
resulting in a margin of control, a result at the end of
the blocking method and a clear model to program in
a clear way and standard.
To achieve this in BluetoothDriver methods:
searchDevices() and searchServices(), their
implementation uses a synchronized segment
together with an object called a lock (of
type Object), which at the time of entering into the
search is set to blocked state, and thus do not block
the main program. When the search finishes
releasing the object (notify) allowing to follow the
normal course and return to the main program to
search results.
This represents a process similar to
Facade (Gamma et al. 1995) of the operation on Java
native Bluetooth, wrapping to provide more
reliability at the time of use.
5 USED TECHNOLOGIES
5.1 J2ME
The proposed architecture design using the Java 2
Micro Edition (Li et al. 2005), language for the
development of the mentioned modules.
This
technology comes with certain limitations because
the devices have limitations in its capabilities of
processing and persistence. J2ME virtual machine
also called KVM (Kilobyte Virtual Machine),
works
with a limited 32-bit . There are also two important
points to consider at the moment of developing in
J2ME: the profiles and configutations (Sun 2005).
6 CONCLUSIONS
This article has presented an architectural model for
games focused on ubiquitous mobile devices.
Been
mentioned the main problems associated with the
development of videogames for the wide range of
mobile devices on the market.
It also raised the most suitable communication
technology for this scenario, where Bluetooth has
been chosen to establish connectivity between the
devices during play sessions, for reasons of cost and
portability in devices.
After developed both implementations of
communication protocols: L2CAP and RFCOMM, it
is possible to make comparisons related with
performance, where clearly the speed of
DEVELOPING AN ARCHITECTURE OF GAMES FOR A BLUETOOTH-BASED UBIQUITOUS ENVIRONMENT
193
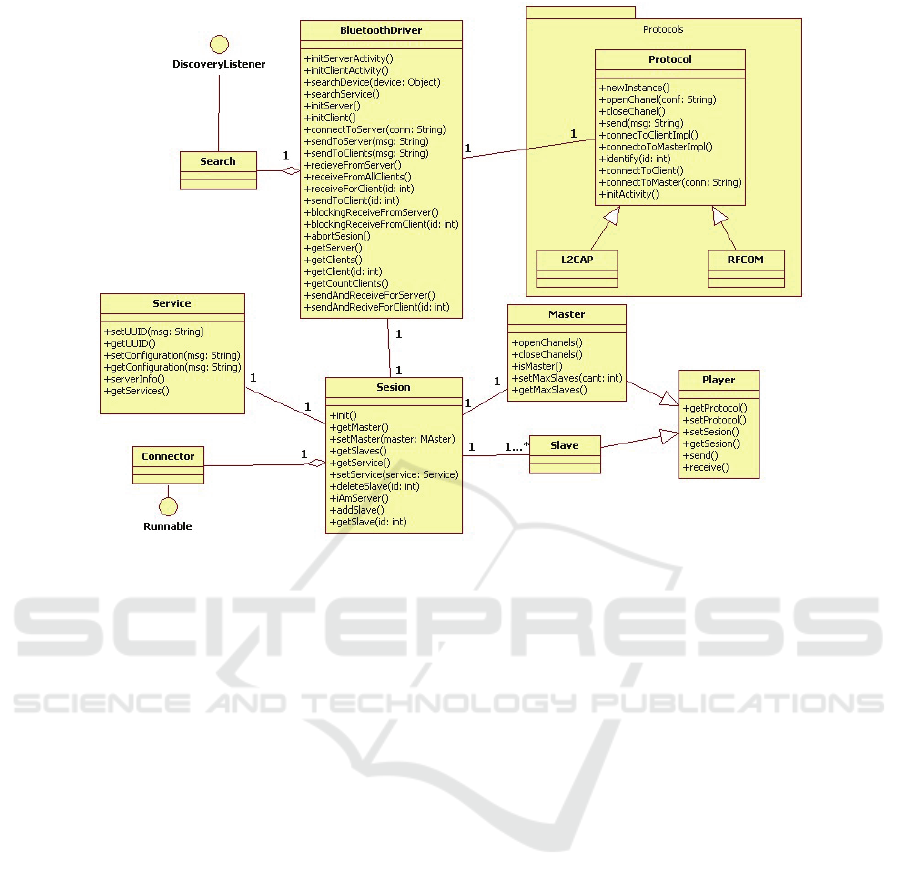
Figure 2: Bluetooth Driver.
transmission in L2CAP protocol is higher because
the data is sent at byte level.
As future work is planned to implement
functionality in Logic modules, Persistence and
Security to thus further enhance the architectural
model proposed here.
To address this will continue with a highly modular
programming to allow extensibility of the
architecture, building powerful and homogeneous
features, and thus allow the development of
multiplayer games on several platforms regardless of
the range of the device for which develops.
REFERENCES
Brieba, A.G., 2004. JSR-82: Bluetooth from Java.
Gamma, E., Helm, R., Johnson, R., Vlissides, J., 1995.
Design Patterns: Elements of Reusable Object-
Oriented Software, Addison-Wesley, Professional
Computing Series.
Li, S., Knudsen, J., 2005. Beginning J2ME: From Novice
to Professional, Third Edition, Apress Editorial.
Sun, 2005. Mobile Information Device Profile (MIDP),
JSR 37, JSR 118 Overview.
Weiser, M., 1991. The Computer for the Twenty-First
Century, Scientific American.
WEBIST 2010 - 6th International Conference on Web Information Systems and Technologies
194
