NEURAL IMAGE RESTORATION FOR DECODING 1-D BARCODES
USING COMMON CAMERA PHONES
A. Zamberletti, I. Gallo, M. Carullo and E. Binaghi
Universit
`
a degli Studi dell’Insubria, via Ravasi 2, Varese, Italy
Keywords:
Barcode recognition, Image restoration, Neural networks.
Abstract:
The existing open-source libraries for 1-D barcodes recognition are not able to recognize the codes from
images acquired using simple devices without autofocus or macro function. In this article we present an
improvement of an existing algorithm for recognizing 1-D barcodes using camera phones with and without
autofocus. The multilayer feedforward neural network based on backpropagation algorithm is used for image
restoration in order to improve the selected algorithm. Performances of the proposed algorithm were compared
with those obtained from available open-source libraries. The results show that our method makes possible
the decoding of barcodes from images captured by mobile phones without autofocus.
1 INTRODUCTION
In recent years the growth of the mobile devices mar-
ket has forced manufacturers to create ever more so-
phisticated devices. The increasing availability of
camera phones, i.e. mobile phones with an integrated
digital camera, has paved the way for a new genera-
tion of applications, offering to the end users an en-
hanced level of interactivity unthinkable a few years
ago. Many applications become possible, e.g. an in-
stant barcode-based identification of products for the
online retrieval of product information. Such appli-
cations allow for example, the display of warnings
for people with allergies, results of product tests or
price comparisons in shopping situations (Wachen-
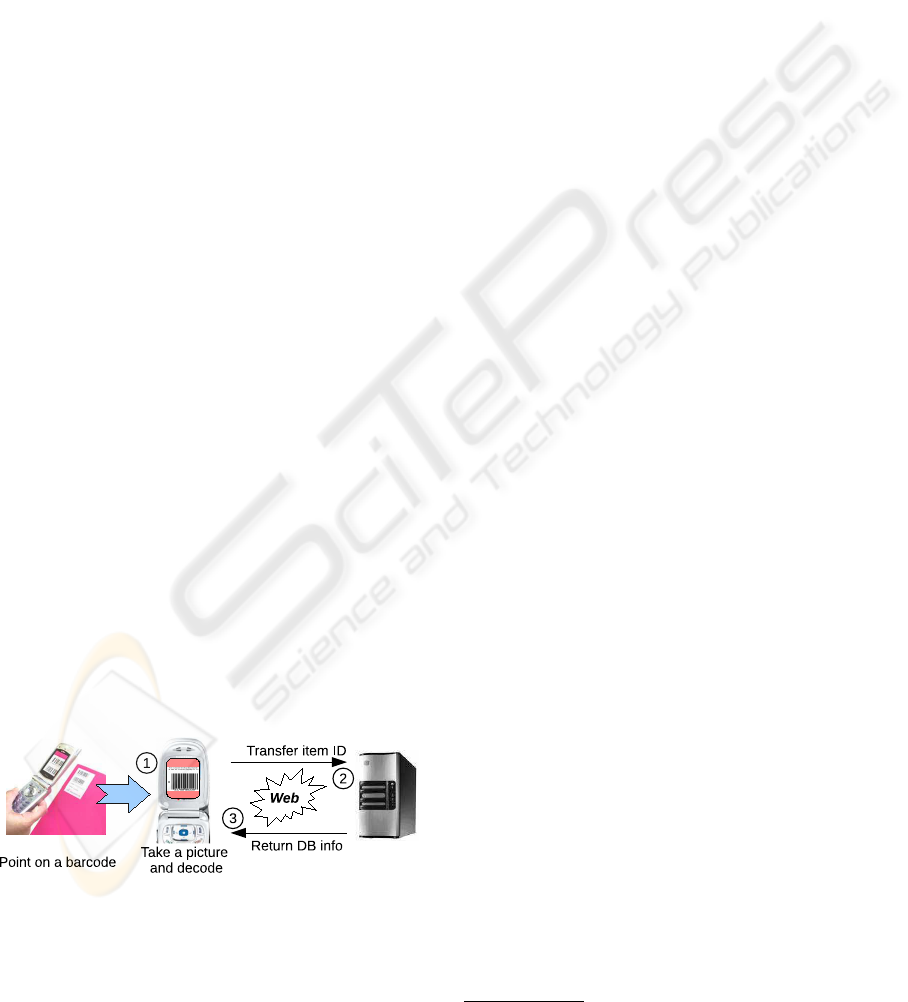
feld et al., 2008). In Figure 1 an illustration of a typ-
ical application that make use of a barcode identifica-
tion.
Figure 1: Graphical illustration of the process of a typical
application that make use of a barcode identification.
There are many different barcode types that ex-
ist for many different purposes. We can split these
into 1D and 2D barcodes. 1D barcodes are what
most people think barcodes are: columns of varying
width lines that are imprinted on the back of products.
Within the 1D barcode we have EAN-13/UPC-A,
Code 128, Code 39, EAN-8 etc. and today we know
that billions of products carry EAN-13 bar codes. The
two most important parameters influencing recogni-
tion accuracy on a mobile camera phone are focus and
image resolution, with the former remaining the prin-
cipal problem; instead low camera resolutions such
as 640x480 pixels are not critical (Adelmann et al.,
2006b). Figure 2 shows an example that highlights
the difference between a barcode acquired with a de-
vice having autofocus (AF) and without AF. It is evi-
dent that images like that in Figure 2(b) present a high
level of degradation that makes the decoding process
very difficult or even worst, impossible.
Searching the Internet for camera phones
with/without AF, we can estimate that about 90%
of camera phones is without autofocus
1
. There are
several libraries to decode 1-D barcode but if we
analyze the most widespread of these available with
an open-source license, all of them show serious
difficulties in recognizing barcodes from images
captured by devices without autofocus (see some
results in Table 1).
Many studies have been made to develop applica-
tions for mobile devices capable to decode 1-D bar-
codes (Wachenfeld et al., 2008; Wojciechowski and
Siek, 2008). Many studies have aimed to look for
1
Based on data from http://www.shoppydoo.com
5
Zamberletti A., Gallo I., Carullo M. and Binaghi E. (2010).
NEURAL IMAGE RESTORATION FOR DECODING 1-D BARCODES USING COMMON CAMERA PHONES.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 5-11
DOI: 10.5220/0002811600050011
Copyright
c
SciTePress

(a) (b)
Figure 2: A sample image captured by a device with auto-
focus (a) and without autofocus (b).
efficient and operative algorithms able to recognize
a high percentage of codes in a limited time. Oth-
ers have studied restoration techniques to improve the
quality of codes acquired with sensors without auto-
focus or macro function, and the accuracy of the sub-
sequent decoding (Simske et al., 2009).
There are several libraries available to decode
the multitude of barcode standards. Only a few of
these libraries are open-source. One prominent open-
source library is the ZXing project
2
. It has the capa-
bility to read not just 1D barcodes but also 2D bar-
codes. Although this library is widely used and has
a great support by the community, it has the common
weakness to expect a camera with autofocus and a rel-
atively high resolution in order to work properly. For
this reason we decided to work on ZXing library to
make it a viable solution when working with devices
without autofocus.
In particular, in this work we experiment with a
novel restoration technique based on neural networks,
in order to improve the quality of the images and
therefore the recognition accuracy of 1D barcodes.
Image restoration is a process that attempts to re-
construct an image that has been degraded by blur
and additive noise(Perry and Guan, 2000; Asmatullah
et al., 2003). The image restoration is called blind im-
age restoration when the degradation function is un-
known. In the present work we perform blind image
restoration using a back-propagation neural network
and we show how the proposed restoration technique
can increase the performance of the selected open-
source tool in order to use it with all types of camera
phones.
Table 1: Results obtained using some open-source libraries
on datasets acquired from devices with and without AF.
with autofocus without autofocus
Sw Precision Recall Precision Recall
ZXing 1.00 0.64 1.00 0.04
BaToo 0.95 0.58 0.60 0.13
JJil / 0.00 / 0.00
2
http://code.google.com/p/zxing/ a Java multi-
format 1D/2D barcode image processing library
2 IDENTIFICATION AND
DECODING TECHNIQUES
The present work focuses on a restoration algorithm
to improve the accuracy of a generic 1D barcode de-
coding process. However, to make the work self-
contained, a brief overview on the state of the art in
decoding barcodes is given here.
Algorithms for decoding barcodes from digital
images, can be broken down into two steps: identi-
fication and decoding.
An identification algorithm receives in input an
image and provides as output the image coordinates
that identify the region containing the barcode. There
are many different algorithms to perform such oper-
ations and in the following we summarize some of
them. In (Wachenfeld et al., 2008) the authors pre-
sented an algorithm we named Scanline Detection
which selects a pixel in the center of the image to be
analyzed. Assuming that the pixel belongs to the bar-
code to be extracted, the algorithm make a horizontal
expansion that ends when it finds the ends of the bar
code. In (Adelmann et al., 2006a) the scanline detec-
tion algorithm is applied to multiple rows drawn regu-
larly throughout the image. We name Expansion De-
tection another algorithm presented in (Ohbuchi et al.,
2004) that performs vertical and horizontal expansion
starting from the center pixel of the image to be an-
alyzed. Other two interesting algorithms are those
presented in (Youssef and Salem, 2007) and (Basaran
et al., 2006) using Hough Transform and Canny Edge
Detection respectively.
A barcode decoding algorithm receives in input
an image and a sequence of coordinates and returns
as output one or more strings containing the values
recognized. Unlike identification, the decoding pro-
cess is standard and is greatly simplified by the re-
dundant structure that every barcode has. Some inter-
esting decoding algorithms are briefly described be-
low. The algorithm proposed by (Adelmann et al.,
2006a; Chai and Hock, 2005) we named Line Decod-
ing, reads a line of barcode and makes the decoding.
The algorithm is able to understand if a code has been
read correctly by analyzing the control code contained
within the barcode. Multi Line Decoding, proposed
in (Wachenfeld et al., 2008), is an extension of the
Line Decoding algorithm, where the Line Decoding
is applied at the same time to a set of parallel im-
age rows. The code will be constructed collecting the
digits that appear several times in all the lines ana-
lyzed. Finally, a very different approach is based on
neural networks trained to recognize the codes. This
algorithm, which we called Neural Net Decoding, was
presented in (Liu et al., 1993).
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
6

3 THE PROPOSED METHOD
The neural restoration algorithm we propose in this
paper was added in the ZXing library, a library that
was proved robust decoding of 1D barcodes.
ZXing uses a modified version of the algorithm
proposed by (Adelmann et al., 2006a) and mentioned
in the previous section. The changes allow ZXing to
identify 1D barcodes placed in a non-horizontal posi-
tion, partially missing and placed in non-central posi-
tion within the image portion. The ZXing’s identifi-
cation and decoding process is summarized in Algo-
rithm 1. A special parameter try harder can be en-
abled to increase the number of lines considered in
the process and the number of rotations of the input
image, to search barcodes placed in a non-horizontal
position. This latest process is done by rotating the
image and re-applying the Algorithm 1 until the code
is not identified.
The decoding is based on the Line Decoding algo-
rithm described in the previous section.
Algorithm 1 The ZXing’s identification and decoding
process.
Require: select a set of rows H to be decoded
Require: select the number of rotations R to be ap-
plied to the input image
1: for all r ∈ R do
2: for all y ∈ H do
3: Select the image row L
y
4: Transform L
y
from RGB to gray levels
5: Apply to L
y
a high-boost filter (Gonzalez
and Woods, 2001) with mask [-1 4 -1]
6: Apply an adaptive threshold to L
y
7: if decode(L
y
) is successful then
8: break loop
9: end if
10: end for
11: end for
The barcode decoding process requires the image
containing the code to be binarized. The image bi-
narization is usually carried out using a thresholding
algorithm. However there is an high chance that the
image involved in the process is blurred and/or noisy,
making the thresholding phase non-trivial. All the
software tested in this work show their limits when
faced with such images, with a high failure rate in the
decoding process. The main contribution of this work
is the definition and evaluation of a restoration tech-
nique that, complemented with an adaptive threshold-
ing, can be proposed as an alternative to standard bi-
narization. We base our strategy on the Multilayer
Perceptron model trained with Backpropagation Mo-
mentum algorithm. The netwok has five input neu-
rons, five output neurons and three hidden layers with
two neurons in each layer. This configuration was
chosen as it provides a high-speed in generalization
combined with a high accuracy.
The network can learn how to restore degraded
barcodes if trained with a proper amount of exam-
ples of the real system to be modeled. An example
of degraded input image and its desired output is il-
lustrated in Figure 3. The truth image (or output im-
age) was created using a free online service to gener-
ate barcodes
3
and aligned to the input image using a
computer vision algorithm called Scale-Invariant Fea-
ture Transform (SIFT) (Lowe, 1999)
4
.
(a) (b)
Figure 3: An example of training image captured by a de-
vice without autofocus (a), and its expected truth image (b).
Only the rectangular section containing the barcode was ex-
tracted from the original image.
Training samples are presented to the neural net-
work having the following form (P
in
,P
out
). The in-
put pattern P
in
= {L
y
(x
i
),...L
y
(x
i+S
)} is a sequence
of S values, one for each input neuron, where L
y
(x
i
)
is the i
th
pixel of the row L
y
scaled in [0,1]. P
out
=
{L
o
y
(x
i
),...L
o
y
(x
i+S
)} is the expected output extracted
from the truth image and then scaled in [0,1], at the
same position of the P
in
pattern. Given a pair of train-
ing images having width W , we select only one line
L
y
and a number of patterns equal to W −S + 1, mov-
ing the input window p = 1 pixels forward for each
new pattern. The training and test set creation was
performed using degraded input images acquired by
1MP camera without autofocus at variable distances.
The trained neural network performs the restora-
tion for never seen input patterns P
in
transforming
the input pixel values to gray levels without blur and
noise. The algorithm is applied on each single line L
y
selected by the identification algorithm. During the
restoration phase, according to the step value p and
size S of the input window, each pixel can be clas-
sified more than once. A decision rule must be ac-
complished to compute the final value of the restored
image. In the present work for each pixel L
y
(x
i
) the
value of average output activation o
i
= (
∑
N
i
n=1
o
i,n
)/N
i
3
http://www.terryburton.co.uk/
barcodewriter/generator/ a free web-based online
barcode generator
4
We have used the plugin JavaSIFT (http:
//fly.mpi-cbg.de/
˜
saalfeld/javasift.html)
for ImageJ (http://rsb.info.nih.gov/ij/)
NEURAL IMAGE RESTORATION FOR DECODING 1-D BARCODES USING COMMON CAMERA PHONES
7

(a) Dataset1
(b) Dataset2
Figure 4: Three sample images of Dataset1 (a), and three of Dataset2 (b).
is calculated, where N
i
is the number of times in
which the pixel has been classified by the neural
model and o
i
is the activation of the i
th
output neu-
ron. Binarization process adopted for the restored im-
ages simply evaluate the average activation value o
i
and sets a threshold at 0.5.
We named ZXing-MOD the library ZXing with
the addition of our neural restoration process. The
new algorithm is very similar to the original described
in Algorithm 1, only the lines 5 and 6 have been re-
placed respectively by the neural restoration process
and the binarization technique described above. The
number of lines to be analyzed and decoded is de-
duced from a parameter called rowStep. This param-
eter specifies the number of image lines to be skipped
between two subsequent scanning L
y
i
and L
y
i+1
.
4 EXPERIMENTS
The performance of ZXing-MOD was evaluated and
compared with the original ZXing and with other two
open-source libraries: BaToo
5
and JJil
6
. System per-
formances are compared using precision P and recall
R (Frakes and Baeza-Yates, 1992),
5
http://people.inf.ethz.ch/adelmanr/batoo/
Barcode Recognition Toolkit
6
http://code.google.com/p/jjil/ Jon’s Java
Imaging Library, for mobile image processing
P =
correct
actual
, R =
correct
possible
(1)
where correct is the number of barcodes correctly rec-
ognized by the system, actual is the total number of
barcodes recognized by the system, and possible is the
total number of barcodes we expected from system.
A Precision score of 1.0 means that every code rec-
ognized is correct, but says nothing about the number
of codes that were not recognized correctly. A high
Precision guarantees that there are few false positives.
Whereas a Recall of 1.0 means that every barcode
was correctly recognized, but says nothing about how
many other barcodes were incorrectly recognized. In
addition to precision and recall were also evaluated
minimum and maximum execution time.
Analyzing the literature we realize that there is
no dataset available to evaluate a barcode recogni-
tion system. For this reason we create two datasets
of images, one with pictures of barcodes taken from
devices with the AF function (Dataset1) and a sec-
ond dataset with photos taken by devices without AF
(Dataset2). The Dataset1 contains 215 color images
all taken with a Nokia 5800 mobile phone, while
Dataset2 contains 215 images all acquired by a Nokia
7610 mobile. The two datasets were acquired vary-
ing the rotation angle of the barcode, the distance be-
tween camera and object, the lighting conditions and
the resolution.
The training set used to train the neural network is
built considering 14 pairs of images as shown in Fig-
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
8

(a) (b) (c)
(d) (e) (f)
Figure 5: Two examples of barcode contained in blurred images captured with a device without AF (a)(d). Thresholding
results obtained with the library ZXing (b)(e), and corresponding threshold obtained with ZXing-MOD (c)(f).
Table 2: Comparison results between the three tested algorithms and our strategy. The table shows the Precision, Recall and
execution time computed on Dataset1.
Time (ms)
Library Parameter Precision Recall Min Max Average
ZXing 1.00 0.64 0.26 12.80 1.77
try harder 1.00 0.82 0.26 244.40 26.59
BaToo 0.95 0.58 1.80 29.64 13.49
JJil / 0.00 219.26 966.70 470.73
ZXing-MOD rowStep=1 1.00 0.87 1.74 2777.12 353.78
rowStep=5 1.00 0.83 1.74 559.48 90.22
rowStep=40 1.00 0.70 1.74 68.87 17.71
ure 3. All the input images have been cropped from
photos belonging to Dataset2.
The two datasets and the training set used for our
experiments are available online
7
allowing to com-
pare our algorithm with other research works.
The quantitative results are shown in Tables 2
and 3. We must start by saying that the library Jiil,
although much-quoted, did not recognize any code in
the two datasets used. This could be caused by the
fact that the library is currently under development
and could therefore be in a state of low functional-
ity. Conversely, libraries ZXing and BaToo showed
good performances on Dataset1 but, as introduced
earlier, collapsed on images of Dataset2. Analyzing
the results obtained on Dataset1, we note that the pa-
rameter try harder of ZXing increases significantly
Recall although this advantage also leads to an in-
7
http://www.dicom.uninsubria.it/arteLab/
ricerca.html
crease in computation time. ZXing with the param-
eter try harder=true becomes the best library to use
with high resolution and not degraded images. The
recall of ZXing-MOD is slightly lower than that of
ZXing, this because the rotation of the analyzed im-
age is not carried out and then some codes placed in
a position not horizontal are not recognized. BaToo
is efficiently fast even if the percentage of recognized
images is rather low compared with results obtained
with ZXing and ZXing-MOD.
The results observed in tests carried out on
Dataset2 show how our proposed neural restoration
strategy makes ZXing-MOD the only viable solution
that works on blurred and low resolution images. The
rowStep parameter determines the number of lines
to be analyzed, the greater the value of rowStep the
lower the number of lines analyzed. ZXing-MOD
maintains good results even when the value of row-
Step increases, passing from a value equal to 1 to 5 the
NEURAL IMAGE RESTORATION FOR DECODING 1-D BARCODES USING COMMON CAMERA PHONES
9

Table 3: Comparison results between the three tested algorithms and our strategy. The table shows the Precision, Recall and
execution time computed on Dataset2.
Time (ms)
Library Parameter Precision Recall Min Max Average
ZXing 1.00 0.04 0.24 12.15 1.87
try harder 1.00 0.09 0.24 106.16 58.41
BaToo 0.60 0.13 9.29 19.19 10.10
JJil / 0.00 120.41 253.26 146.89
ZXing-MOD rowStep=1 0.99 0.70 1.34 439.36 156.59
rowStep=5 0.99 0.64 1.34 101.41 37.52
rowStep=40 1.00 0.47 1.34 27.18 6.62
Recall drops of 0.06, and the execution time become
four times lower than the initial one (see Table 3).
Tests were performed on a computer with the fol-
lowing configuration: Intel Core 2 Quad Q6600, 2GB
RAM and the Windows XP Professional OS. Al-
though the processor is multi-cored, all implemented
software is single threaded.
A qualitative assessment was done by implement-
ing a simple J2ME application and installing it on dif-
ferent camera phones. Evaluating the application on
a Sony Ericsson v800 mobile phone reported the op-
erativeness of the approach with a mean recognition
time of 4 seconds.
5 CONCLUSIONS
In this paper, we proposed a general purpose solu-
tion to the problem of recognizing 1D barcodes from
blurred images. This solution adopted is applicable
to any decoding strategy and is based on supervised
neural networks.
The algorithm has shown excellent experimental
results and is therefore a valid alternative to standard
methods that try to improve the quality of the images
before decoding.
We implemented a version of ZXing-MOD in
J2ME testing it on different types of phones with very
encouraging results.
REFERENCES
Adelmann, R., Langheinrich, M., and Floerkemeier, C.
(2006a). A toolkit for bar-code-recognition and -
resolving on camera phones – jump starting the in-
ternet of things. In Proceedings of the workshop on
Mobile and Embedded Interactive Systems (MEIS’06)
at Informatik 2006. GI Lecture Notes in Informatics
Series (LNI), Dresden, Germany.
Adelmann, R., Langheinrich, M., and Floerkemeier, C.
(2006b). Toolkit for bar code recognition and resolv-
ing on camera phones - jump starting the internet of
things. In Hochberger, C. and Liskowsky, R., editors,
GI Jahrestagung (2), volume 94 of LNI, pages 366–
373. GI.
Asmatullah, Mirza, A., and Khan, A. (2003). Blind im-
age restoration using multilayer backpropagator. In
Multi Topic Conference, 2003. INMIC 2003. 7th In-
ternational, pages 55–58.
Basaran, E., zgr Uluay, and Erturk, S. (2006). Reading bar-
code using digital cameras through image processing.
In Proceedings of 5th International Symposium on In-
telligent Manufacturing Systems.
Chai, D. and Hock, F. (2005). Locating and decoding ean-
13 barcodes from images captured by digital cameras.
In Information, Communications and Signal Process-
ing, 2005 Fifth International Conference on, pages
1595–1599.
Frakes, W. B. and Baeza-Yates, R. A., editors (1992). In-
formation Retrieval: Data Structures & Algorithms.
Prentice-Hall.
Gonzalez, R. C. and Woods, R. E. (2001). Digital Im-
age Processing. Addison-Wesley Longman Publish-
ing Co., Inc., Boston, MA, USA.
Liu, S.-J., Liao, H.-Y., Chen, L.-H., Tyan, H.-R., and
Hsieh, J.-W. (1993). Camera-based bar code recog-
nition system using neural net. In Neural Networks,
1993. IJCNN ’93-Nagoya. Proceedings of 1993 Inter-
national Joint Conference on, volume 2, pages 1301 –
1305.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In ICCV ’99: Proceedings of the
International Conference on Computer Vision-Volume
2, page 1150, Washington, DC, USA. IEEE Computer
Society.
Ohbuchi, E., Hanaizumi, H., and Hock, L. A. (2004).
Barcode readers using the camera device in mobile
phones. In Cyberworlds, 2004 International Confer-
ence on, pages 260–265.
Perry, S. W. and Guan, L. (2000). Weight assignment for
adaptive image restoration by neural networks. IEEE
Trans. on Neural Networks, 11:156–170.
Simske, S. J., Sturgill, M., and Aronoff, J. S. (2009). Ef-
fect of copying and restoration on color barcode pay-
load density. In Borghoff, U. M. and Chidlovskii, B.,
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
10

editors, ACM Symposium on Document Engineering,
pages 127–130. ACM.
Wachenfeld, S., Terlunen, S., and Jiang, X. (2008). Robust
recognition of 1-d barcodes using camera phones. In
ICPR 2008, pages 1–4. IEEE.
Wojciechowski, A. and Siek, K. (2008). Barcode scanning
from mobile-phone camera photos delivered via mms:
Case study. In ER Workshops, volume 5232 of Lecture
Notes in Computer Science, pages 218–227. Springer.
Youssef, S. M. and Salem, R. M. (2007). Automated bar-
code recognition for smart identification and inspec-
tion automation. Expert Syst. Appl., 33(4):968–977.
NEURAL IMAGE RESTORATION FOR DECODING 1-D BARCODES USING COMMON CAMERA PHONES
11
