
SPEEDED UP IMAGE MATCHING USING SPLIT AND
EXTENDED SIFT FEATURES
Faraj Alhwarin, Danijela Ristić–Durrant and Axel Gräser
Institute of Automation, University of Bremen, Otto-Hahn-Alle NW1, D-28359 Bremen, Germany
Keywords: Speeded Up Features Matching, Split SIFT, Extended SIFT.
Abstract: Matching feature points between images is one of the most fundamental issues in computer vision tasks. As
the number of feature points increases, the feature matching rapidly becomes a bottleneck. In this paper, a
novel method is presented to accelerate features matching by two modifications of the popular SIFT
algorithm. The first modification is based on splitting the SIFT features into two types, Maxima- and
Minima-SIFT features, and making comparisons only between the features of the same type, which reduces
the matching time to 50% with respect to the original SIFT. In the second modification, the SIFT feature is
extended by a new attribute which is an angle between two independent orientations. Based on this angle,
SIFT features are divided into subsets and only the features with the difference of their angles less than a
pre-set threshold value are compared. The performance of the proposed methods was tested on two groups
of images, real-world stereo images and standard dataset images. The presented experimental results show
that the feature matching step can be accelerated 18 times with respect to exhaustive search without losing a
noticeable portion of correct matches.
1 INTRODUCTION
Matching a given image with one or many others is
a key task in many computer vision applications
such as object recognition, images stitching and 3D
stereo reconstruction. These applications require
often real-time performance. The matching is
usually done by detecting and describing key-points
in the images then applying a matching algorithm to
search for correspondences.
Classic key-point detectors such as Difference of
Gaussians (DoG) (Lowe, 2004), Difference of
Means (DoM) (Bay et al., 2008) and Harris corner
detector (Harris
& Stephens, 1988) use simple
attributes like blob-like shapes or corners.
For the key-point description a variety of key-
point descriptors have been proposed such as the
Scale Invariant Feature Transform (SIFT) (Lowe,
2004), Speeded Up Robust Features (SURF) (Bay et
al., 2008) and Gradient Location and Orientation
Histogram (GLOH) (Mikolajczyk & Schmid, 2005).
To robustly match the images, point-to-point
correspondences are determined using similarity
measure for Nearest Neighbour (NN) search such as
Euclidean distance. After that, the RANdom Sample
Consensus (RANSAC) method is applied to estimate
the correct correspondences (inliers).
The combination of the DoG detector and SIFT
descriptor proposed in (Lowe, 2004) is currently the
most widely used in computer vision applications
due to the fact that SIFT features are highly
distinctive, and invariant to scale, rotation and
illumination changes. In addition, SIFT features are
relatively easy to extract and to match against a large
database of local features. However, the main
drawback of SIFT is that the computational
complexity of the algorithm increases rapidly with
the number of key-points, especially at the matching
step due to the high dimensionality of the SIFT
feature descriptor.
In order to overcome the main SIFT drawback,
various modifications of the SIFT algorithm have
been proposed. In general, the strategies dealing
with the acceleration of SIFT features matching can
be classified into three different categories: reducing
the descriptor dimensionality, parallelization and
exploiting the power of hardware (GPUs, FGPAs or
multi-core systems) and Approximate Nearest
Neighbor (ANN) searching methods.
(Ke
& Sukthankar, 2004) applied Principal
Components Analysis (PCA) to the SIFT descriptor.
The PCA-SIFT reduces the SIFT feature descriptor
287
Alhwarin F., Risti
´
c –Durrant D. and Gräser A. (2010).
SPEEDED UP IMAGE MATCHING USING SPLIT AND EXTENDED SIFT FEATURES.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 287-295
DOI: 10.5220/0002820102870295
Copyright
c
SciTePress

dimensionality from 128 to 36, so that the PCA-
SIFT is fast for matching, but seems to be less
distinctive than the original SIFT as demonstrated in
a comparative study by (Mikolajczyk & Schmid,
2005).
(Bay et al., 2008) developed the Speeded Up
Robust Feature (SURF) method that is a
modification of the SIFT method aiming at better
run time performance of features detection and
matching. This is achieved by two major
modifications. In the first one, the Difference of
Gaussian (DoG) filter is replaced by the Difference
of Means (DoM) filter. The use of the DoM filter
speeds up the computation of features detection due
to the exploiting integral images for a DoM
implementation. The second modification is the
reduction of the image feature vector length to half
the size of the SIFT feature descriptor length, which
enables quicker features matching. These
modifications result in an increase computation
speed by a factor 3 compared to the original SIFT
method. However, this is insufficient for real-time
requirements.
In recent years, several papers (Heymann et al.,
2007) were published addressing the use of the
parallelism of modern graphics hardware (GPU) to
accelerate some parts of the SIFT algorithm, focused
on features detection and description steps. In
(Charriot
& Keriven, 2008) GPU power was
exploited to accelerate features matching. These
GPU-SIFT approaches provide 10 to 20 times faster
processing allowing real-time application.
The matching step can be speeded up by
searching for the Approximate Nearest Neighbor
(ANN) instead of the exact nearest neighbor. The
most widely used algorithm for ANN is the kd-tree
(Firedman et al., 1977), which successfully works in
low dimensional search space, but performs poorly
when feature dimensionality increases. (Lowe, 2004)
used the Best-Bin-First (BBF) method, which is
expanded from kd-tree by modification of the search
ordering so that bins in feature space are searched in
the order of their closest distance from the query
feature and stopping search after checking the first
200 nearest-neighbor candidates. The BBF provides
a speedup factor of 2 times faster than exhaustive
search while losing about 5% of correct matches. In
(Muja & Lowe., 2009) Muja and Lowe compared
many different algorithms for approximate nearest
neighbor search on datasets with a wide range of
dimensionality and they found that two algorithms
obtained the best performance, depending on the
dataset and the desired precision. These algorithms
used either the hierarchical k-means tree or multiple
randomized kd-trees.
In this paper, a novel strategy which is distinctly
different from all three of the above mentioned
strategies, is introduced to accelerate the SIFT
features matching step. The paper contribution is
summarized in two points.
Firstly, in the key-point detection stage, the SIFT
features are split into two types, Maxima and
Minima, without extra computational cost and at the
matching stage only features of the same type are
compared. since correct match can not be expected
between two features of different types.
Secondly, in the orientation assignment stage the
SIFT feature is extended by a new attribute without
extra computational cost. The novel attribute is an
angle between the original SIFT feature orientation
and a new different orientation
φ
. Hence SIFT
features are divided into a few clusters based on the
introduced angle. At the matching stage, only
features of the almost same angle are compared. The
idea behined this is that correct matches can be
expected only between two features whose angles
differ for less than a pre-defined threshold.
The proposed method can be generalized for all
local feature-based matching algorithms which
detect two or more types of key-points (e.g. DoG,
LoG, DoM) and whose descriptors are rotation
invariant, where two different orientations can be
assigned (e.g. SIFT, SURF, GLOH).
2 ORIGINAL SIFT METHOD
The Scale Invariant Feature Transform (SIFT)
method, proposed by Lowe (Lowe, 2004), takes an
image and transforms it into a set of local features.
The SIFT features are extracted through the
following three stages:
1. Feature Detection and Localization: In this
stage, the locations of potential interest points in the
image are determined by detecting the extrema of
Difference of Gaussian (DoG) scale space. For
searching scale space extrema, each pixel in the
DoG images is compared with its 26 neighbors in
3×3 regions of scale-space. If the pixel is
lower/larger than all its neighbors, then it is labelled
as a candidate key-point. Each of these key-points is
exactly localized by fitting a 3D quadratic function
computed using a second order Taylor expansion
around key-point location. Hence key-points are
filtered by discarding points of low contrast and
points that correspond to edges.
2. Feature Orientation Assignment: An orientation
is assigned to each key-point based on local image
gradient data. For each pixel in a certain region
R
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
288

around the key-point location, the first order
gradients are calculated according to the following
equations:
(1,,)(1,,)
(, 1, ) (, 1, )
x
y
gLx y Lx y
gLxy Lxy
σ
σ
σ
σ
=+ −−
=+−−
(1)
where
(, , )Lxy
σ
is the grey value of the pixel
(, )pxy in the image blurred by a Gaussian Kernel
whose size is determined by
σ
.
The gradient magnitude and orientation for each
pixel are computed respectively as follows:
22
() )
)
(, ) (
(,)arctan(
xy
yx
mx y g g
xy g g
θ
=+
=
(2)
From gradient data (magnitudes and orientations)
of pixels within the region
R , a 36-bin orientation
histogram is constructed covering the range of
orientations [-180°, 180°] (each bin covers 10°). For
each bin, the histogram is calculated according to
following formulas:
( ) int( ( , ) / 10) 17ori i x y
θ
=−
(3)
where
(, ) [0,360)xy
θ
∈° °
() ( , ) ( , )
RR
i
mag i m x y m x y=
∑∑
(4)
where
( ,)
i
mxyare gradient magnitudes of pixels
that have discrete gradient orientations equal to
()ori i . An example of the orientation histogram is
given in Figure1.
Figure 1: 36 bins orientation histogram constructed using
local gradient data around a key-point.
The orientation of the SIFT feature is defined as
the orientation corresponding to the maximum bin of
the orientation histogram according to:
()
()
max
arg max ()ori mag i
θ
=
(5)
3. Feature Description: A local feature descriptor is
computed at each key-point based on the local image
gradient data. The region around the key-point is
divided into 16 square boxes. For each box an eight
bin orientation histogram is calculated from gradient
data of pixels within the corresponding box relative
to the feature orientation to provide rotation
invariance. Finally, all 16 resulted eight bin
orientation histograms is transformed into 128-D
vector. The vector is normalized to unit length to
achieve the invariance against illumination changes.
Therefore the original SIFT feature consists of
four attributes, a location
(, )Pxy, a scale
σ
(level
of scale space where is the key-point), an orientation
max
θ
and a 128-D descriptor vector
V . Hence, the
original SIFT feature can be written as:
max
(,, , )
F
PV
σθ
.
3 EXTENDED SIFT FEATURES
Generally, if a scene is captured by two cameras or
by one camera but from two different viewpoints,
the corresponding points in two resulted images,
which represent images of the same 3D point, will
have different image coordinates, different scales,
and different orientations, though, they must have
almost similar descriptors which are used to match
the images using a similarity measures.
In order to speed-up the features matching, it is
assumed in this paper that two independent
orientations can be assigned to each feature so that
the angle
φ
between them stays almost unchanged
for all correct corresponding points even in the case
of the images captured under different conditions
such as viewing geometry and illumination changes.
The idea of using an angle between two
independent orientations is aimed at avoidance of
comparison of a great portion of features that can not
be matched in any way. This leads to a significant
acceleration of the matching step. Hence, the reason
for proposing SIFT feature angle
φ
is twofold.
On the one hand, to filter the correct matches, so
that a correct match
ij
M
can be established
between two features
1
i
F
and
2
j
F
, which belong
respectively to images 1 and 2, if and only if the
difference between their angles
1
i
φ
and
2
j
φ
is less
than a preset threshold value
ε
:
()mag i
()ori i
180−° 180
+
°
ma x
θ
SPEEDED UP IMAGE MATCHING USING SPLIT AND EXTENDED SIFT FEATURES
289
12
ij
φφφ
ε
Δ= − ≤
(6)
On the other hand, the reason for proposing SIFT
feature angle
φ
is to accelerate the SIFT feature
matching because there is no necessity to compare
two features if the difference between their angles is
larger than a preset threshold
ε
.
3.1 Matching Speeded-Up Factor
Assuming two images to be matched whose feature
angles
{
}
1
i
φ
and
{
}
2
j
φ
are considered as random
variables
1
Φ and
2
Φ respectively.
In the case of correct matches the random
variables
1
Φ and
2
Φ are dependent on each other
since the angle differences of correct matches are
equal to zero which correspond to the ideal image
matching case.
In contrast, the random variables
1
Φ and
2
Φ
are
independent of each other for incorrect matches
while the angle differences of incorrect matches are
somehow distributed in the range
[,]
π
π
−
.
Therefore, the difference
12
ΔΦ = Φ − Φ for the
incorrect matches has a probability density function
(PDF) distributed over the whole angle range
[,]
π
π
−
, whereas the PDF of ΔΦ for the correct
matches is concentrated in the so-called range of
correct matches, which is the narrow range about 0°.
Generally, if the random variables
1
Φ
and
2
Φ are independent and uniformly distributed in the
range
[,]
π
π
− , their difference ΔΦ is uniformly
distributed in the same range (Simon et al., 1995).
If a matching procedure, which compares only
the features having angle differences
ΔΦ in the
range of correct matches, is used in the case of
uniform distribution of
ΔΦ
for incorrect matches,
then the matching process is accelerated by a speed-
up factor
SF . Speed-up factor can be expressed as
the ratio between the width of the whole angle range
360
total
w =° and the width of the range of correct
matches
cor
w :
360
total
cor cor
w
SF
ww
°
==
(7)
3.2 SIFT Feature Angle
It is suggested that a SIFT feature is extended with
an angle that meets the following conditions:
1-
The angle has to be invariant to the geometric
and photometric transformations (the invariance
condition);
2-
The angle has to be uniformly distributed in the
range
[,]
π
π
−
(the “equally likely” condition).
To assign an angle to the SIFT feature, two
orientations are required.
The invariance condition is guaranteed only if
these orientations are different, whereas the “equally
likely” condition is guaranteed if the orientations are
independent and uniformly distributed in the range
[,]
π
π
−
.
As mentioned in Section 2, the original SIFT
feature has already an orientation
max
θ
. Therefore, it
is only necessary to define one new orientation.
Firstly, the angle
s
um
θ
corresponding to the
vector sum of all orientation histogram bins is
considered and the difference between the suggested
orientation and the original SIFT feature orientation
maxsum sum
φ
θθ
=−is assigned to the SIFT feature as
the SIFT feature angle
s
um
φφ
= .
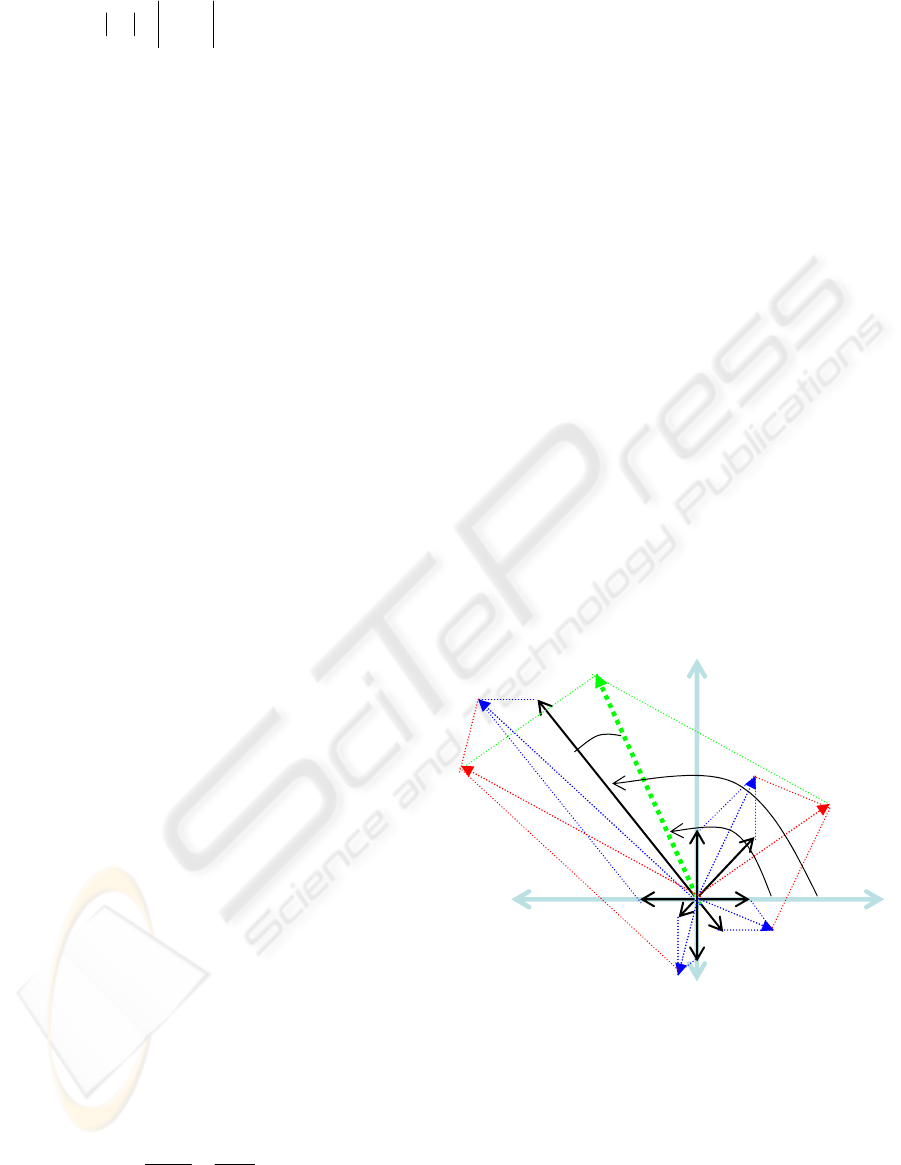
Figure 2: The vector sum of the bins of an eight
orientation histogram.
Figure 2 presents geometrically the vector sum
of an eight bins orientation histogram (eight bins
only for the sake of simplicity), whereas the used
orientation histogram has 36 bins as explained in
Section 2 for the case of the original SIFT. Hence,
mathematically, the proposed orientation
s
um
θ
is
calculated according to:
s
um
φ
max
θ
s
um
θ
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
290
()
()
18
17
18
17
()sin ()
arctan
()cos ()
i
sum
i
mag i ori i
mag i ori i
θ
=−
=−
⎛⎞
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⎝⎠
⋅
∑
=
⋅
∑
(8)
Since
s
um
θ
is different from
max
θ
,
s
um
φ
meets
the invariance condition.
To examine whether
s
um
φ
meets the “equally
likely” condition, it is considered as a random
variable
s
um
Φ .
The PDF of
s
um
Φ is estimated using 725356
SIFT features extracted from 600 test images (400
benchmark images (Image-Dataset) and 200 stereo
images from a real-world robotic application) Some
examples of used images are given in Section 5.
The PDF of
s
um
Φ was computed by dividing the
angle space [-180°,180°] into 36 sub-ranges, where
each sub-range cover 10°, and by counting the
numbers of features whose angle
s
um
φ
belong to
each sub-range.
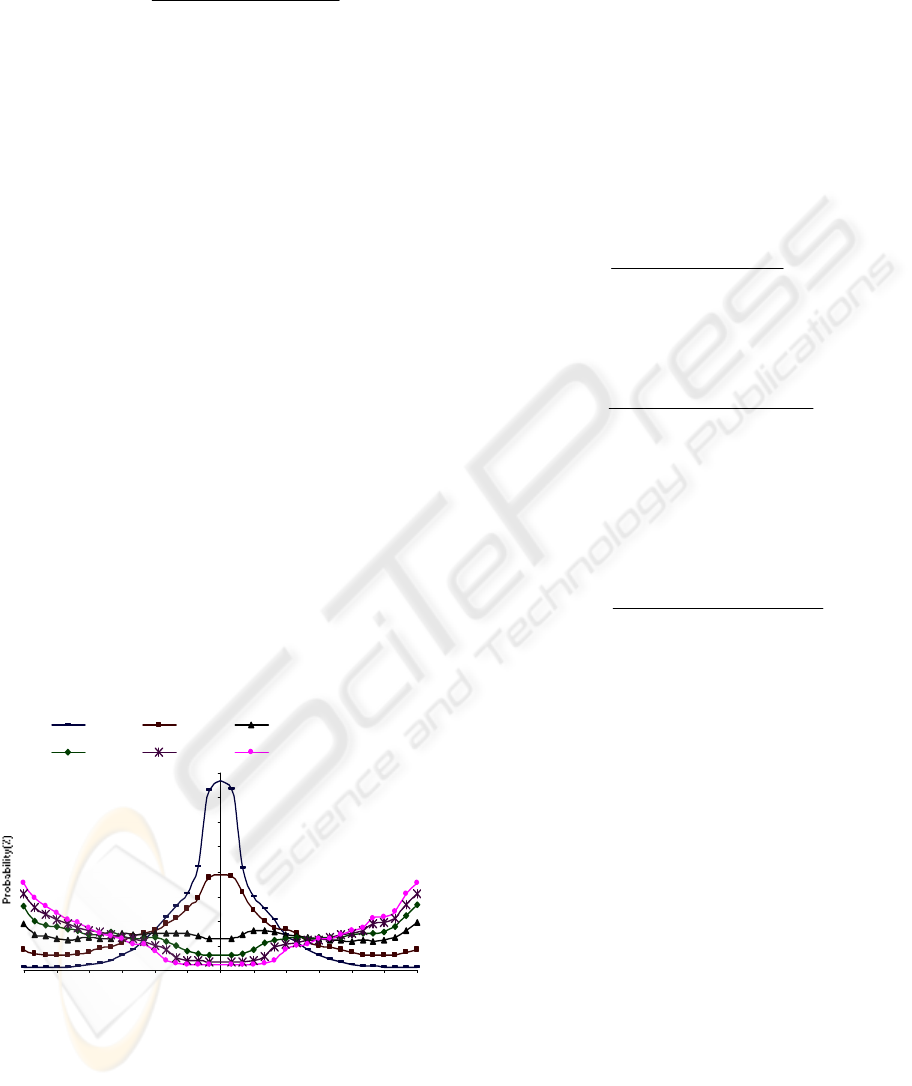
As evident from Figure 3 about 60% of features
have angles
s
um
φ
falling in the range [-30°,30°]. The
reason of this outcome is the high dependency
between
max
θ
and
s
um
θ
due to the fact that the
s
um
θ
corresponds to the vector sum of all orientation
histogram bins including the bin which corresponds
to
max
θ
.
0
2
4
6
8
10
12
14
16
-180 -150 - 120 -90 -60 -30 0 30 60 90 120 150 18
0
Angle(degree)
Φsum Φtran,0 Φtran,1
Φtran,2 Φtran,3 Φtran,4
Figure 3: The experimental PDFs of
s
um
Φ and
,tran
κ
Φ
for SIFT features extracted from 600 test images.
The
max
θ
is the dominant orientation in the patch
around the key-point so that it has dominant
influence to the
s
um
θ
. Due to the high dependency
between
max
θ
and
s
um
θ
,
s
um
φ
does not meet the
“equally likely” condition and can not be considered
as SIFT feature angle.
To define an appropriate SIFT feature angle,
orientations
,tran
κ
θ
are further suggested These
orientations are computed as the vector sums of all
orientation histogram bins excluding the maximum
bin and
κ
of its neighbour bins at the left and at the
right side as follows:
()
()
()
()
18
17
18
17
18
17
[m 1,m 1]
18
17
[m 1,m 1]
,0
,1
,
()sin ()
()cos ()
()sin ()
()cos ()
.
arctan
arctan
arctan
.
i
im
i
im
i
i
i
i
tran
tran
tran
mag i ori i
mag i ori i
mag i ori i
mag i ori i
κ
θ
θ
θ
=−
≠
=−
≠
=−
∉− +
=−
∉− +
⎛⎞
⋅
∑
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⋅
∑
⎜⎟
⎜⎟
⎝⎠
⎛⎞
⋅
∑
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⋅
∑
⎜⎟
⎜⎟
⎝⎠
=
=
=
()
()
18
17
[m ,m ]
18
17
[m ,m ]
()sin ()
()cos ()
i
i
i
i
mag i ori i
mag i ori i
κκ
κκ
=−
∉− +
=−
∉− +
⎛⎞
⋅
∑
⎜⎟
⎜⎟
⎜⎟
⎜⎟
⋅
∑
⎜⎟
⎜⎟
⎝⎠
(9)
where arg max( ( ))mmagi
=
.
The PDFs of the random variables
,tran
κ
Φ
corresponding to angles
,,maxtran tran
κκ
φθθ
=− are
estimated in the same manner as the PDF of
s
um
Φ ,
performing the experiments over 725356 SIFT
features extracted from the same 600 test images
mentioned before. The measured PDFs of
,tran
κ
Φ
(for
0,1, 2, 3, 4
κ
=
) are shown in Figure 3. It is
evident from Figure 3 that the
,1tran
Φ has a PDF
which is the closest to the uniform distribution.
Therefore, the angle
,1tran
φ
meets both conditions,
invariance and “equally likely” condition, and it can
be considered as a new attribute
φ
of the SIFT
feature,
,1tran
φφ
= . With this extension a SIFT
feature becomes
max
(,, , ,)FP V
σ
θ
φ
.
SPEEDED UP IMAGE MATCHING USING SPLIT AND EXTENDED SIFT FEATURES
291

4 SPLIT AND EXTENDED SIFT
FEATURES MATCHING
Assuming that two sets of extended SIFT features
are given:
;{ 1, 2,..., }
r
i
RFi r==
;{ 1, 2,...., }
l
j
LFj l== ,
containing respectively
r and l features. The
number of possible matches
()
,
rl
ij
ij
M
FF is equal to
rl⋅ . Among these possible matches a small number
of correct matches may exist. Considering of all
possible matches is computationally expensive.
In the following two novel matching procedures
are proposed to accelerate the matching process. The
main idea behind both procedures is comparison of
only features that share the same property which
may lead to correct matches.
4.1 Split SIFT Features Matching
As said in Section 2, the SIFT feature locations are
detected as the extrema of the scale space. Extrema
can be Minima or Maxima so that there are two
types of SIFT features, Maxima and Minima SIFT
features.
Through the extraction of SIFT features from
600 different images in considered experiments, it
was found that the number of Maxima is almost
equal to the number of Minima SIFT features
extracted from the same image. The matching time
was reduced by 50% with respect to the original
SIFT matching starting from the idea that no correct
match can be expected between two features of
different types. The claim that no correct matches
between Minima and Maxima SIFT features is
experimentally supported. Namely, it was found that
the features of each correct match are always from
the same type.
To declare the matching time reduction by
splitting the SIFT features, it is assumed that the
number of features extracted from the first and the
second image are expressed as:
max min
rr r=+
max min
ll l=+
(10)
where
max max
)(rl and
min min
()rl are the numbers of
Maxima and Minima SIFT features respectively.
The matching time without regard to the type of
features, that is the time of exhaustive search, is:
exh
Trl
=
⋅
(11)
The matching time, in the case of comparison of
only features of the same type, is proportional to the
following sum:
max max min minsplit
Trlrl=⋅+⋅
(12)
Substituting the assumption
max min
2rrr≅≅
and
max min
2lll≅≅ into (12) one obtains:
22
split
exh
TrlT=⋅ =
(13)
Hence, the matching time is decreased by 50% in
respect to exhaustive search.
4.2 Extended SIFT Features Matching
A set of SIFT feature angle differences
{ ; 1, 2,..., }
rl
ij i j
ij r l
φφφ
Δ
=− = ⋅
is established for
the SIFT feature angles
{ ; 1, 2, ..., }
r
i
ir
φ
=
and
{ ; 1, 2,..., }
l
j
jl
φ
=
of the extended SIFT features
from the given sets R and L.
Considering the angle differences
ij
φ
Δ as a
random variable
ij
Δ
Φ , the PDFs of
ij
ΔΦ for both
correct and incorrect matches are measured in
experiments over considered 600 images.
The measured PDFs are shown in Figure 4. It can
be seen from Figure 4 that about 92 % of correct and
only 12% of possible matches belong to [-20°,20°].
Therefore, in order to find correct matches it is
needed to treat only 12% of possible matches which
can speed-up the features matching significantly.
To exploit this outcome, SIFT features are
divided into several subsets based on their angles.
The SIFT features of each subset are compared only
with the features of some subsets, so that the
resulting correspondences must have absolute
differences of angles less than a pre-set threshold.
Here a threshold of 20 is selected because almost all
correct matches have angle differences in the range
[-20°, 20°] as illustrated in Figure 4.
Consider that each of the sets of features
R and
L are divided into
b
subsets, so that the first subset
contains only the SIFT features whose angles belong
to
[, 2 )b
ππ π
−−+ and the
th
i subset contains
features whose angles belong to
[2(1), 2)ib ib
ππππ
−+ − −+ . Consequently, the
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
292

th
b subset contains features whose angles belong to
[2(1),)bb
π
ππ
−+ − .
0
3
6
9
-180 -140 -100 -60 -20 20 60 100 140 180
Angle (Degree)
Probability (%)
PDF o f ∆Φ for
possible matches
PDF o f ∆Φ for
co rr ect mat ches
Figure 4: The experimental PDF of the angle difference
for the incorrect and the possible matches.
The number of features of the both sets can be
expressed as:
01 1
...
b
rr r r
−
=+++
01 1
...
b
ll l l
−
=+++
(14)
Because of the evenly distribution of feature
angles over the range of their angles
[,]
π
π
− as
shown in Figure 3, the features are almost equally
divided into several subsets. Therefore, it can be
asserted that the feature numbers of each subset are
almost equal to each other.
01 1
....
b
rr r rb
−
≅≅≅
01 1
....
b
ll l lb
−
≅≅≅
(15)
To exclude matching of features that have a
difference of angles outside the range
[,]aa
−
°°,
each subset is matched to its corresponding one and
to
n neighbouring subsets to the left and to the right
side as illustrated in Figure 5. In this case the mat-
ching time is proportional to the following term:
() ()
1
0
1
0
2
11
(2 1)
b
jn
i
jin
bin
ijin
extend
ij
extend
extend
Trl
rl
T
b
rl n
T
b
−
+
=
=−
−+
==−
⎛⎞
⎜⎟
⎜⎟
⎝⎠
=⋅
∑
∑
⋅
≅
∑∑
⋅⋅ +
≅
(16)
Therefore, the achieved speed-up factor to
exhaustive search is equal to:
21
extend
b
SF
n
=
+
(17)
The relation between
n , a and b is as follows:
()
360
2
21 2. 12
360
ab
nan
b
⎢⎥
⎛⎞
⎛⎞
⎢⎥
⎜⎟
⎜⎟
⎢⎥
⎜⎟
⎜⎟
⎝⎠
⎢⎥
⎝⎠
⎣⎦
°
⋅⋅
⋅+ ⋅ = ⇒ = −
(18)
where
⎢
⎥
⎣
⎦
•
represents the first integer value larger
than or equal to
•
.
Substituting (18) into (17) yields:
360
2
extend
SF
a
°
=
(19)
The result (19) means that if it is aimed to
exclude matching of features that have angle
differences outside the range [-20°,20°], then the
matching step is accelerated by a factor 9.
When this modification of original SIFT feature
matching is combined with the split SIFT features
matching, the obtained speedup factor is 18 without
loosing a noticeable portion of correct matches. This
is illustrated with the experimental results presented
in the next section.
Figure 5: The matching procedure through the comparison
of features having angle differences smaller than a pre-set
threshold.
5 EXPERIMENTAL RESULTS
The proposed method for speeding up feature
matching based on split and extended SIFT features
was tested using both a standard image dataset, and
real world stereo images.
The used image dataset *ID consists of about
500 images of 34 different scenes. Each scene is
represented with a number of images taken under
different photometric and geometric conditions.
Some examples of the images used in the
experiments, whose results are presented here, are
given in Figure 6.
Stereo images were grabbed by the stereo camera
)
2,4bb
ππ
⎡
⎢
⎣
)
0,2 b
π
⎡
⎢
⎣
)
2,0b
π
⎡
⎢
⎣
−
)
2( 1) , 2nbnb
ππ
⎡
⎢
⎣
−− −
)
2,2(1)nb n b
ππ
⎡
⎢
⎣
−−+
)
2( 1) , 2( 2)nbn b
ππ
⎡
⎢
⎣
−+ −+
)
2( 1) ,2( 2)nbnb
π
⎡
⎢
⎣
++
)
2,2(1)nb n b
ππ
⎡
⎢
⎣
+
)
2( 1) ,2nbnb
ππ
⎡
⎢
⎣
−
)
2,4bb
ππ
⎡
⎢
⎣
)
0,2 b
π
⎡
⎢
⎣
)
2,0b
π
⎡
⎢
⎣
−°
SPEEDED UP IMAGE MATCHING USING SPLIT AND EXTENDED SIFT FEATURES
293

(a) (b)
(c) (d)
Figure 6: Some of the standard dataset images of scenes
captured under different conditions: (a) viewpoint, (b)
light changes, (c) zoom, (d) rotation.
system of the rehabilitation robotic system FRIEND
(Functional Robot arm with frIENdly interface for
Disabled people) (Martens et al., 2007). FRIEND is
intended to support the user in daily life activities
which demand object manipulation such as serving a
drink and preparing and serving a meal. The crucial
for autonomous object manipulation is precise 3D
object localization. The key factor for reliable 3D
reconstruction of object points is correct matching of
correspondence points in stereo images. Hence,
stereo robot vision is a typical application where fast
and reliable feature matching is of utmost interest.
Some examples of stereo images showing
FRIEND environment in “serving a drink” robot
working scenario are given in Figure 7.
In order to evaluate the effectiveness of the
proposed method, its performance was compared
with the performances of two algorithms for ANN
(hierarchical k-means tree and randomized kd-trees).
Figure 7: Stereo images from a real-world robotic
application used in the experiments.
Comparisons were performed using the Fast
Library for Approximate Nearest Neighbors
**(FLANN), which is a library for performing fast
approximate nearest neighbour searching in high
dimensional spaces. For all experiments, the
matching process is carried out under different
precision degrees making trade off between
matching speedup and matching accuracy.
The precision degree is defined as the ratio
between the number of correct matches returned
using the considered algorithm and the number of
correct matches returned using exhaustive search,
*http://lear.inrialpes.fr/people/Mikolajczyk/Database/index.html
**http://people.cs.ubc.ca/~mariusm/index.php/FLANN/
whereas the speedup factor is defined as the ratio
between the exhaustive matching time and the
matching time for the corresponding method
For both ANN algorithms, hierarchical k-means
trees and randomized kd-trees, the precision is
adjusted by the number of nodes to be examined,
whereas for the proposed “Split and Extended SIFT”
method, the precision is determined by adjusting the
width of the range of correct matches
cor
w
(explained in Section 3). The correct matches are
determined using the Nearest Neighbor Distance
Ratio matching strategy (Lowe, 2004) with distance
ratio equal to 0.6, followed by RANSAC algorithm
to keep only inliers.
Two experiments were run to evaluate proposed
method, on real stereo images and on the images of
the dataset ID. In the first experiment, SIFT features
are extracted from 200 stereo images. Each two
corresponding images are matched using all three
considered algorithms under different degrees of
precision. The experimental results are shown in
Figure 8.
0,1
1
10
100
1000
50 60 70 80 90 100
Precision(%)
Speedup (SF)
Split&Extended SIFT K-Means Tree Rand, KD-Trees
Figure 8: Trade-off between matching speedup and
matching precision for real stereo image matching.
As can be seen from Figure 8, the performance
of the proposed method outperforms both ANN
algorithms for all precisions. For precision around
99% level, the proposed method provides a speedup
factor of about 20. For the lower precision degree
speedup factor is much higher.
As evident from Figure 8 by using proposed
“Split and extended SIFT” the speedup factor
relative to exhaustive search can be increased to 80
times while still returning 70% of the correct
matches.
The second experiment was carried out on the
images of the dataset ID. As said before, this dataset
consists of about 500 images of various contents.
These images represent images of 34 different
scenes taken under different conditions such as
rotation, zoom, light and viewpoint changes.
For the performed experiments the images of
dataset are grouped according to these different con-
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
294

0,1
1
10
100
1000
50 60 70 80 90 100
0,1
1
10
100
50 60 70 80 90 100
0,1
1
10
100
1000
50 60 70 80 90 100
0,1
1
10
100
50 60 70 80 90 100
(a) (b)
(c)
(d)
Figure 9: Trade-off between matching speedup (SF) and
matching precision for image groups (a) light, (b)
viewpoint, (c) rotation, (d) zoom changes.
ditions into viewpoint, zoom, rotation and light
group. For each group, SIFT features are extracted
from each image and pairs of two corresponding
images are matched using hierarchical k-means tree,
randomized kd-trees and proposed “Split and
Extended SIFT”, with different degrees of precision.
The experimental results are shown in Figure 9.
As evident from Figure 9, proposed “Split and
Extended SIFT” outperforms the both other
considered ANN algorithms in speeding up of
features matching for all precision
degrees.
6 CONCLUSIONS
In this paper two novel ideas are proposed to
accelerate the matching process. Both ideas are
based on the same principle, which is comparison of
only features that share the same property which
may lead to correct matches. The proposed method
was compared with two algorithms for ANN
searching, hierarchical k-means and randomized kd-
trees. The presented experimental results show that
the performance of the proposed method
outperforms two other considered algorithms. Also,
the presented experimental results show that the
feature matching step can be accelerated 18 times
with respect to exhaustive search without losing a
noticeable portion of correct matches. When only
50% of correct matches is required, the speedup
factor can be increased to more than100.
REFERENCES
Chariot, A., Keriven, R., 2008. GPU- boosted online
image matching, 19th International Conference on
Pattern Recognition 1-4. IEEE
Bay, H., Tuytelaars, T., Van Gool, L., 2008. SURF:
Speeded Up Robust Features, Int. Journal of
Computer Vision and Image Understanding. Vol. 110,
Issue 3, 346-359
Firedman J.H., Bentley J.L. & Finkel R.A. 1977. An
algorithm for finding best matches in logarithmic
expected time. Transactions Mathematical Software.
ACM 209-226.
Harris, C., Stephens, M. 1988. A combined corner and
edge detector, International Conference of the Alvey
Vision Conference. 147-151.
Heymann, S., Miller, K., Smolic A., Froehlich B.,
Wiegand, T., 2007. SIFT implementation and
optiization for general-purpose GPU, In WSCG ’07.
Ke Y., Sukthankar, R., 2004. PCA-sift: A more distinctive
representation for local image descriptors. In Proc.
CVPR. USA. 506–513.
Lowe, D. G., 2004. Distinctive image features from scale
invariant keypoints. Int. Journal of Computer Vision
60(2), 91–110.
Martens, C., Prenzel, O., Gräser, A., 2007. The
Rehabilitation Robots FRIEND-I&II: Daily Life
Independency through Semi-Autonomous Task-
Execution; Rehabilitation. I-Tech Education
Publishing. Vienna, Austria. ISBN 978-3-902613-01-1
Mikolajczyk, K. Schmid, C., 2005. A performance
evaluation of local descriptors. IEEE Transactions on
pattern analysis and machine intelligence. VOL 27,
NO.10
Simon, M. K., Shihabi, M. M., Moon, T., 1995. Optimum
Detection of Tones Transmitted by a Spacecrft, TDA
PR 42-123, 69-98
Muja M. & Lowe D. G. 2009 Fast Approximate Nearest
Neighbors with Automatic Algorithm Configuration,
in International Conference on Computer Vision
Theory and Applications (VISAPP'09)
SPEEDED UP IMAGE MATCHING USING SPLIT AND EXTENDED SIFT FEATURES
295
