
APPLICATION OF A HIGH-SPEED STEREOVISION SENSOR
TO 3D SHAPE ACQUISITION OF FLYING BATS
Yijun Xiao and Robert B. Fisher
School of Informatics, University of Edinburgh, 10 Crichton Street, Edinburgh, U.K.
Keywords: High-speed Video, 3D Dynamic Shape, Stereo Vision, Motion, Tracking.
Abstract: 3D shape acquisition of fast-moving objects is an emerging area with many potential applications. This
paper presents a novel application of 3D acquisition for studying the dynamic external morphology of live
bats in flight. The 3D acquisition technique is based on binocular stereovision. Two high-speed (500 fps)
calibrated machine vision cameras are employed to capture intensity images from the bats simultaneously,
and 3D shape information of the bats is derived from the stereo video recording. Since the high-speed
stereovision system and the bat dynamic morphology study application are both novel, it was unknown to
what extent the system could perform 3D acquisition of the bats’ shapes. We carried out experiments to
evaluate the performance of the system using artificial objects in various controlled conditions, and the
knowledge gained helped us deploy the system in the on-site data acquisition. Our analysis of the real data
demonstrates the feasibility of gathering 3D dynamic measurements on bats’ bodies from a few selected
feature points and the possibility of recovering dense 3D shapes of bat heads from the stereo video data
acquired. Issues are revealed in the 3D shape recovery, most notably related to motion blur and occlusion.
1 INTRODUCTION
A relatively unexplored area of computer vision is
the acquisition of 3D shapes from very fast-moving
objects (Woodfill, 2004), despite a large amount of
study in 3D shape recovery from various visual cues
such as shading (Woodham, 1980), motion (Ullman,
1979), texture (Witkin, 1983), disparity (Trucco and
Verri, 1998), active texture (Zhang and Huang,
2006), etc. This paper presents a novel application of
high-speed 3D shape acquisition. The objective is to
obtain 3D shape measurements of bats in flight
when performing prey-hunting tasks, which are of
biological and acoustic significance in answering
questions related to bats’ behaviour (Fenton, 2001).
A stereovision sensor has been employed for the
shape acquisition. The reasons are twofold. First,
high-speed video cameras are already available on
the market with frame rates up to a few thousands
fps (frames per second) at affordable cost (Pendley,
2003). Also the latest advances in stereovision
sensing have been able to generate high quality
range data (Siebert and Urquhart, 1994), even at
video rate (Mark, 2006). However, 3D sensors
based on other principles such as time-of-flight or
active vision have not developed speeds that can
match video cameras. Therefore, we believe
stereovision is a viable solution to high-speed 3D
sensing in the near future. Second, stereo video
recording provides valuable information to establish
temporal correspondence on the 3D surface of the
object, which may help study dynamic properties of
the object (bat) shape.
This paper describes the progress in the bat
observation application. The configuration of the
stereovision sensor and the related performance
evaluation are described in Section 2. Details of the
sensor deployment in real data acquisition are given
in Section 3, and Section 4 reports the analysis of the
data we collected from live bats on-site.
2 SYSTEM EVALUATION
The stereovision system comprises two high-speed
monochrome video cameras, two infrared (IR) light
panels and two processing computers. The cameras
have maximum resolution 1280x1024 and are
running at 500 fps. Two sets of manual lenses with
focal length 50mm and 75mm are employed, which
gives the stereovision sensor a working range [0.5m,
2m] in a window about 30cm(wide)x40cm(high).
431
Xiao Y. and B. Fisher R. (2010).
APPLICATION OF A HIGH-SPEED STEREOVISION SENSOR TO 3D SHAPE ACQUISITION OF FLYING BATS.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 431-434
DOI: 10.5220/0002823804310434
Copyright
c
SciTePress
We evaluated the sensor before the real data
acquisition took place. First we examined the
working range. We used a rigid planar surface with
sharp texture as the ground truth object. The stereo
images of the planar surface were acquired and then
processed using DI3D
TM
stereo photogrammetry
software (Khambay, 2008) to generate 3D images of
the object. Each 3D image was fitted with a 3D
plane, and the RMS (Root Mean Square) value of
the fitting residuals was calculated to evaluate the
accuracy of the 3D image against the ground truth.
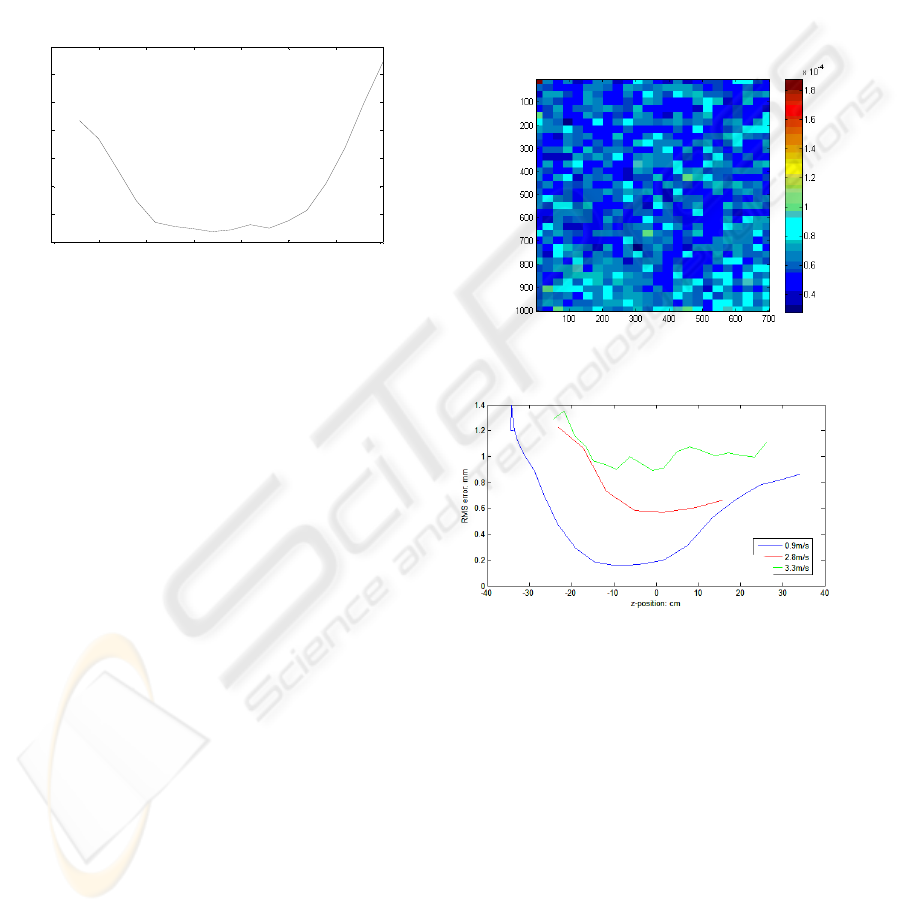
-15 -10 -5 0 5 10 15 20
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
working distance: cm
RMS error: mm
Figure 1: RMS errors of measuring a 3D plane around
working distance 80cm using 50mm lenses.
We placed the planar surface at a number of
positions and calculated corresponding RMS errors.
Fig. 1 illustrates the RMS errors obtained from all
test positions around working distance 80cm using
50mm lenses. It can be seen that the RMS errors
exhibit clearly a basin shape with a flat bottom of
about 10-15cm. The basin shape was observed in
tests with other configurations of the stereovision
system as well. We thought that the basin shape was
caused by the depth of field of the lenses.
The planar object was also used to check spatial
coherence of the sensor. A 3D image of the planar
surface was partitioned into 30x30 patches. Each
patch was fitted with a 3D plane and a RMS error
was calculated. The RMS errors are shown in Fig.2,
where pseudo colour represents the RMS errors. It
appears the RMS errors are randomly distributed on
the planar surface, which suggests no obvious bias to
a specific spatial location in the 3D measurements.
We also conducted tests to reveal dynamic
properties of the sensor. We used a well-textured
ball as the ground-truth object. The object was
swung over the sensor in three orthogonal directions
(horizontal, vertical and depth). By fitting a 3D
sphere to the 3D image of the ball, we can calculate
the position of the centroid of the ball, which can be
then used to estimate the ball speed. The fitting
residuals can be used to calculate RMS errors. The
RMS errors related to motion in the depth direction
are illustrated in Fig. 3. It can be seen the error curve
at low speed (0.9m/s) exhibits a basin shape just like
in the static test (Fig.1). At medium and high speed,
the error curves are much more flattened and noisier,
which reflect the influence of motion blur when
speed gets higher (>3m/s). RMS errors with respect
to horizontal and vertical motion in our tests are
larger than those with respect to motion on the depth
direction at the same magnitude. Especially the
horizontal motion caused the highest level of RMS
errors. The sensitivity of stereovision to motion
parallel to epipolar line is hypothesized.
Figure 2: Spatial coherence: RMS errors of fitting planes
to 30x30 blocks in a 3D image.
Figure 3: RMS errors of fitting a sphere to 3D images of a
ball swung along the depth direction.
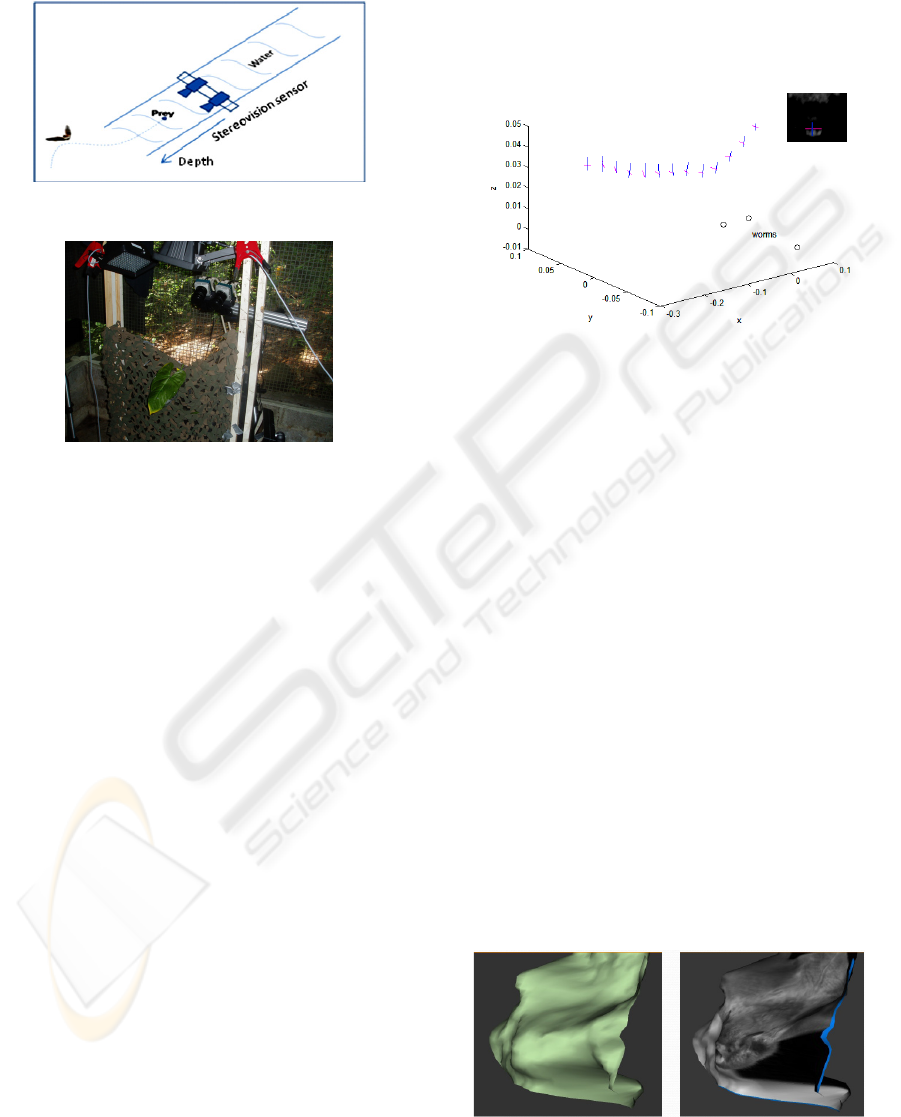
3 DATA ACQUISITION
The real data acquisition took place at two sites:
Odense in Denmark and BCI (Barro Colorado
Island) in Panama. Two groups (water-trawling and
insect-gleaning) of bats were examined. For the
water trawling bats, the stereovision system was
placed in the water to capture the front view of bats
flying towards the cameras (Fig. 4). The flying path
of bats was constrained in the depth direction of the
sensor. Bait was put in the water at regular places.
The bats usually flew through the narrow water path
to take the bait, since they needed a distance to take
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
432
off from the water surface. The bats were therefore
trained to move in the depth direction of the
stereovision sensor.
Figure 4: Sensor setup for water trawling bats.
Figure 5: Sensor setup and for insect gleaning bats.
For the insect gleaning bats, object speed is not
crucial in 3D acquisition, since the bats usually
reduce their speeds (in our measurements the speed
was below 1m/s) to hover around the prey in search
of a good hunting position. To obtain the best image
quality, we placed the sensor focussed at the closest
point to the prey (Fig.5). The prey (insect) was
placed on a leaf among a camouflage bush. The
position of the prey on the leaf was adjustable to
allow study of the bat’s searching behaviour before
hunting the prey. The focusing point of the
stereovision sensor was on the centre of the leaf. The
orientation of the leaf was adjusted almost
perpendicular to the depth direction of the sensor to
avoid observing occlusion by the leaf. With this
setup, the sensor was able to capture larger
foreground objects.
4 DATA ANALYSIS
The first analysis of the stereo data recording is to
make some 3D measurements on the bats’ bodies. A
few feature points (landmarks) were manually
placed in one (reference) frame of the left and right
image sequences. Once the landmarks were selected
in the reference frame, they were tracked across the
remaining frames of the image sequences using an
algorithm based on optical flow (Ogale and
Aloimonos, 2007). The tracking is currently running
in a semi-automatic manner. In some frames where
the scene has drastic changes, location predication of
the landmark points could be severely inaccurate,
and then manual marking of the locations was
involved.
Figure 6: Mouth measurements of a bat in flight hunting
prey.
Once the landmark points were extracted from
the left and right image sequences, stereo
triangulation was performed to calculate the
corresponding 3D points, which can then be used to
derive some measurements such as speeds, sizes,
mouth openings of the bats, etc. Fig. 6 illustrates an
example of such 3D measurements. The four corners
of the mouth of the bat were measured in 64
consecutive frames. The recovered 3D positions of
the mouth corners are depicted in Fig. 6, where the
red lines represent the widths of the mouth and the
blues represent the heights. The positions of the
worms in Fig.6 were also recovered, from which the
water surface was calculated. The 3D positions of
the bat mouth corners and the worms in Fig. 6 are
displayed in a coordinate system in which the water
surface is aligned with the x-y plane. Such
arrangement of coordinates renders the altitude of
the bat in flight above the water level (z-coordinate)
explicit. It is clearly seen that the bat approached the
prey in a low and flattened path and then lifted
above the water surface immediately after grabbing
the prey.
Figure 7: 3D shape of M. daubentonii recovered stereo
images.
(a)
(b)
APPLICATION OF A HIGH-SPEED STEREOVISION SENSOR TO 3D SHAPE ACQUISITION OF FLYING BATS
433

3D shape recovery from the stereo data was also
investigated using the DI3D
TM
software. We
considered three main issues which may affect the
stereo software to obtain 3D shapes of bats such as:
1) lack of texture on bats’ bodies; 2) occlusion of
body parts; 3) motion blur. Our experiments so far
have shed some light on these concerns. Firstly, it
was found that the texture of bats could be revealed
under proper illumination. Fig.7(b) shows a bat
head’s fine texture when the bat flew through the
working range of the sensor on which the IR light
was concentrated. With the texture visible to the
cameras, the stereo software was able to recover part
of the 3D geometry of the bat head as shown in
Fig.7(a). Secondly, motion blur did take its toll on
3D shape recovery. For instance, the bat’s head in
Fig.7(a) was smoothed with some fine shape details
missing. Thirdly, the effect of occlusion was
evident. For instance, the bat’s ears were squeezed
onto the head in Fig.7. Despite these defects, the
results show that it is possible to recover 3D shapes
of bats using stereovision methods.
5 CONCLUSIONS
This paper reports an application of using a 500 fps
stereovision sensor to capture 3D external
morphology of bats in flight. We discussed the data
acquisition scenarios and evaluated the performance
of the sensor accordingly. Stereo data were acquired
from four species of live bats, and the preliminary
analysis of the data confirmed that it is feasible to
obtain 3D shape information of bats in flight for the
chosen species using the stereovision method at
500fps. A number of issues were revealed in 3D
shape recovery related to motion blur and occlusion,
which helps identify the problems we will be
working on and revise the expectation of quality of
3D measurements we can draw from the stereo data.
REFERENCES
Fenton, M.B., 2001. Bats. Checkmark Books.
Khambay, B., Narin, N., et al, 2008. Validation of
reproducibility of a high-resolution three-dimensional
facial imaging system, British Journal of Oral and
Maxillofacial Surgery, 46(1):27-32.
Ogale, A. S., Aloimonos, Y., 2007. A roadmap to the
integration of early visual modules, International
Journal of Computer Vision, 72(1):9-25.
Pendley, G. J., 2003. High-speed imaging technology;
yesterday, today & tomorrow, Proceedings of SPIE;
25th International Congress on High-Speed
Photography and Photonics.
Scharstein, D., Szeliski, R., 2002. A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms, International Journal of Computer Vision,
47:7-42.
Siebert, J. P., Urquhart, C. W., 1994, C3D: a novel vision-
based 3-D data acquisition system, Proceedings of the
European workshop on combined real and synthetic
image processing for broadcast video production,
Hamburg, Germany.
Trucco, E., Verri, A., 1998. Introductory techniques for 3-
D computer vision, Prentice Hall.
Ullman, S., 1979. The interpretation of structure from
motion. Proceedings of the Royal Society of London
B., 203, 405-426.
Mark, W. van der, Gavrila, D. M., 2006. Real-time dense
stereo for intelligent vehicles, IEEE Transactions on
Intelligent Transport System, 7(1): 38-50.
Windera, R. J., Darvannb, T. A., et al, 2008. Technical
validation of the Di3D stereophotogrammetry surface
imaging system, British Journal of Oral and
Maxillofacial Surgery, 46(1):33-37.
Witkin, A.P., 1981, Recovering surface shape and
orientation from texture, Artificial Intelligence, 17(1):
17-45.
Woodham, R. J., 1980. Photometric method for
determining surface orientation from multiple images.
Optical Engineering, 19(I): 139-144.
Woodfill, J. I., Gordon, G., Buck, R., 2004. Tyzx DeepSea
high speed stereo vision system, Proceedings of
Computer Vision and Pattern Recognition Workshop,
CVPRW '04. Washington, D.C., USA.
Zhang, L., Curless, B., Seitz, S. M., 2003. Spacetime
Stereo: Shape Recovery for Dynamic Scenes. In
Proceedings of IEEE Computer Society Conference on
Computer Vision and Pattern Recognition, Madison,
USA.
Zhang, S., Huang. P., 2006. High-resolution, real-time 3-D
shape measurement, Optical Engineering, 45(12).
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
434
