
FREE SPACE COMPUTATION FROM STOCHASTIC OCCUPANCY
GRIDS BASED ON ICONIC KALMAN FILTERED DISPARITY MAPS
Carsten Høilund, Thomas B. Moeslund, Claus B. Madsen
Laboratory of Computer Vision and Media Technology, Aalborg University, Denmark
Mohan M. Trivedi
Computer Vision and Robotics Research Laboratory, University of California, San Diego, U.S.A.
Keywords:
Free space, Stereo vision, Kalman filtering, Stochastic occupancy grid.
Abstract:
This paper presents a method for determining the free space in a scene as viewed by a vehicle-mounted camera.
Using disparity maps from a stereo camera and known camera motion, the disparity maps are first filtered by
an iconic Kalman filter, operating on each pixel individually, thereby reducing variance and increasing the
density of the filtered disparity map. Then, a stochastic occupancy grid is calculated from the filtered disparity
map, providing a top-down view of the scene where the uncertainty of disparity measurements are taken into
account. These occupancy grids are segmented to indicate a maximum depth free of obstacles, enabling the
marking of free space in the accompanying intensity image. The test shows successful marking of free space
in the evaluated scenarios in addition to significant improvement in disparity map quality.
1 INTRODUCTION
Autonomous robots in homes and factories are be-
coming ever more prevalent. These robots perform
automatic analysis of their surroundings to determine
their position and where they can move, and ideally to
determine what their surroundings consist of and who
might be present. This makes it natural to include
cameras for functions such as object recognition, face
recognition, and so forth.
To reduce the number of components on board, it
would be beneficial to use the image data for naviga-
tion as well. One important aspect of navigation is
free space. This needs to be established on-the-fly for
the robot to be able to handle dynamic environments,
such as doors opening or outdoor environments. De-
termining the depth of a scene is difficult based on 2D
images, but easier with 3D data, leading to a choice of
stereo images. It is important to have accurate depth
information to reliably determine the free space.
The focus of this paper is to improve the 3D data
used for determining free space, obtainable from e.g.
monocular camera (Li et al., 2008), stereo camera
(Murray and Little, 2000), and omni-directional cam-
eras (Trivedi et al., 2007).
1.1 This Work
In this work we will use stereo cameras to simultane-
ously provide images and depth. We will not assume
forward pointing cameras, as seen in e.g. (Badino
et al., 2007), but rather allow for arbitrary camera
poses. The stereo images and initial depth estima-
tion are provided by a TYZX stereo camera with a
22 cm baseline (TYZX, 2009). The depth estima-
tion is refined by applying ego-motion to a previous
frame thereby transforming it to correspond to the
new viewpoint, and subsequently merging the trans-
formed frame and the current frame, creating a more
accurate estimation. The refined depth estimation is
used to determine the free space around the camera.
2 DEPTH ESTIMATION
Disparity is the measure of difference in position of a
feature in one image compared to another image.
This can be used to infer the depth of the feature. Sev-
eral methods of estimating disparity exist and the cru-
cial point in this work is to have an accurate measure-
ment to reliably determine free space. Knowledge of
the noise in the estimation process can significantly
164
Høilund C., B. Moeslund T., B. Madsen C. and M. Trivedi M. (2010).
FREE SPACE COMPUTATION FROM STOCHASTIC OCCUPANCY GRIDS BASED ON ICONIC KALMAN FILTERED DISPARITY MAPS.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 164-167
DOI: 10.5220/0002830601640167
Copyright
c
SciTePress

improve the system. In our case the distribution of
noise has been found to be Gaussian in image space
and hence the Kalman filter (Kalman, 1960) can be
applied.
2.1 Iconic Kalman Filter
The Kalman filter is a recursive estimation method
that efficiently estimates and predicts the state of a
discretized, dynamic system from a set of potentially
noisy measurements such that the mean square error
is minimized, giving rise to a statistically optimal es-
timation. Only the previous measurement and the cur-
rent measurement are needed.
The general Kalman filter equations are not di-
rectly applicable to a stream of images without some
additional considerations. If an N × M disparity map
was treated as a single input to one Kalman filter
the measurement covariance matrix R would consist
of (N × M)
2
values, which quickly becomes a pro-
hibitively large number. To make an implementation
feasible, each pixel is assumed independent and con-
sequently assigned a separate Kalman filter. A pixel-
wise Kalman filter is said to be iconic (Matthies et al.,
1989).
The filter is applied to disparities, meaning it is
the disparity value that is estimated. The pixel coordi-
nates are still used when applying the motion model,
but not Kalman filtered. The state vector is therefore
just a scalar, i.e. x
t
= x
t
= d
t
.
2.1.1 State, Measurement and Motion Models
The measurement is the disparity value supplied by
the stereo camera. When the camera moves, the pre-
vious disparity map will in general not represent the
new camera viewpoint. Since depth is available for
each pixel they can be moved individually accord-
ing to how the camera was moved, effectively pre-
dicting the scene based on the previous disparity map
and the ego-motion information of the camera yield-
ing two disparity maps depicting the same scene from
the same view point; a prediction and a measurement.
The ego-motion in this context is linear in world
space but since image formation is non-linear,the mo-
tion becomes non-linear in image space. The standard
Kalman filter assumes a linear system which means
it cannot handle the application of ego-motion when
working in image space. Therefore, the state predic-
tion is handled outside of the Kalman filter by tri-
angulating the input into world space, applying ego-
motion as X
t
= M
R
X
t−1
+ M
T
(where M
T
is transla-
tion and M
R
is rotation), and then back-projecting the
result into image space. The Kalman filter therefore
only handles the state variance.
Support for arbitrary camera poses is accom-
plished by including a transformation of the ego-
motion information to the coordinate system of the
camera, given as ω
T
and ω
R
for translation and rota-
tion, respectively.
The complete motion model will be referred to as
the function Φ(.):
x
t|t−1
= Φ(x
t−1|t−1
, M
T
, M
R
, ω
T
, ω
R
) (1)
2.1.2 Noise Models
The process and measurement variance are both
scalars and assumed to be constant, i.e. Q = q
d
and
R = r
d
. The process variance q
d
reflects the confi-
dence in the predictions and is set to a small number
to filter out moving objects (e.g. 0.001). The mea-
surement variance r
d
represents the noise in the dis-
parity values and is determined by measuring the pre-
cision of the stereo camera. The Kalman gain K is ef-
fectively a weighting between the prediction and the
measurement based on the relative values of q
d
and
r
d
.
The state variance P is also a scalar, hence P = p.
It is initially set to r
d
, and from there on maintained
by the Kalman filter.
2.1.3 Predict Phase and Update Phase
The finished iconic Kalman filter equations become:
Predict
x
t|t−1
= Φ(x
t−1|t−1
, M
T
, M
R
, ω
T
, ω
R
) (2)
P
t|t−1
= P
t−1|t−1
+ q
d
(3)
Update
K
t
= P
t|t−1
P
t|t−1
+ r
d
−1
(4)
x
t|t
= x
t|t−1
+ K
t
y
t
− x
t|t−1
(5)
P
t|t
= (1− K
t
)P
t|t−1
(6)
where x is the estimated state, Φ(.) is the mo-
tion model, M
T
/M
R
is the ego-motion as trans-
lation/rotation matrices, ω
T
/ω
R
is the transla-
tion/rotation of ego-motion to camera coordinate sys-
tem, P is the state variance, q
d
is the process variance,
y is the measurement variable, K is the Kalman gain,
and r
d
is the measurement variance.
2.1.4 Update Phase Merging
After the prediction phase has completed and a new
disparity map has been calculated, the update phase
begins. For each pixel, one of three scenarios occur:
FREE SPACE COMPUTATION FROM STOCHASTIC OCCUPANCY GRIDS BASED ON ICONIC KALMAN
FILTERED DISPARITY MAPS
165
1) No measurement exists for the position of the
predicted pixel. The disparity present is simply kept
as-is. A disparity is only carried over a certain num-
ber of consecutive frames before being discarded to
prevent stale pixels from degrading the result.
2) No predictions exists for the position of the
measured pixel, and the disparity is kept as-is.
3) Both exist. To filter out noise, a measurement
is checked against the prediction it is set to be merged
with by applying the Mahalanobis 3-sigma test (Ma-
halanobis, 1936). If a measurement is within three
standard deviations (three times the square root of r
d
)
of the mean (the prediction)in a given Gaussian distri-
bution, it is merged with the prediction by the Kalman
filter. If it fails, it replaces the prediction only if the
prediction is young (to prevent spurious pixels from
keeping correct measurements out) or deemed stale
(to filter out pixels that have drifted).
3 FREE SPACE ESTIMATION
3.1 Stochastic Occupancy Grid
With a disparity map (and consequently a reconstruc-
tion of the world points), the free space where a ve-
hicle can navigate without collision can be computed
by way of an occupancy grid (Elfes, 1989). An oc-
cupancy grid can be thought of as a top-down view
of the scene, with lateral position along the horizontal
axis and depth along the vertical axis. In a stochas-
tic occupancy grid (Badino et al., 2007) the intensity
of each cell denotes the likelihood that a world point
is at the lateral position and depth represented by the
cell. A world point can therefore occupy more than
one cell. How large an area the world point affects
depends on the variance (noise) associated with the
point. There exists various occupancy grid represen-
tations. In this paper, the polar occupancy grid is cho-
sen.
3.2 Free Space
Free space is determined with a combination of the
occupancy grid and the underlying disparity map.
3.2.1 Occupancy Grid Segmentation
Each cell in an occupancy grid contains a value rep-
resenting the probability of that cell being occupied.
The grid is segmented by traversing it from near to far,
stopping when the value of a cell exceeds a threshold.
The depth of that cell is the maximum depth likely to
be free of obstacles.
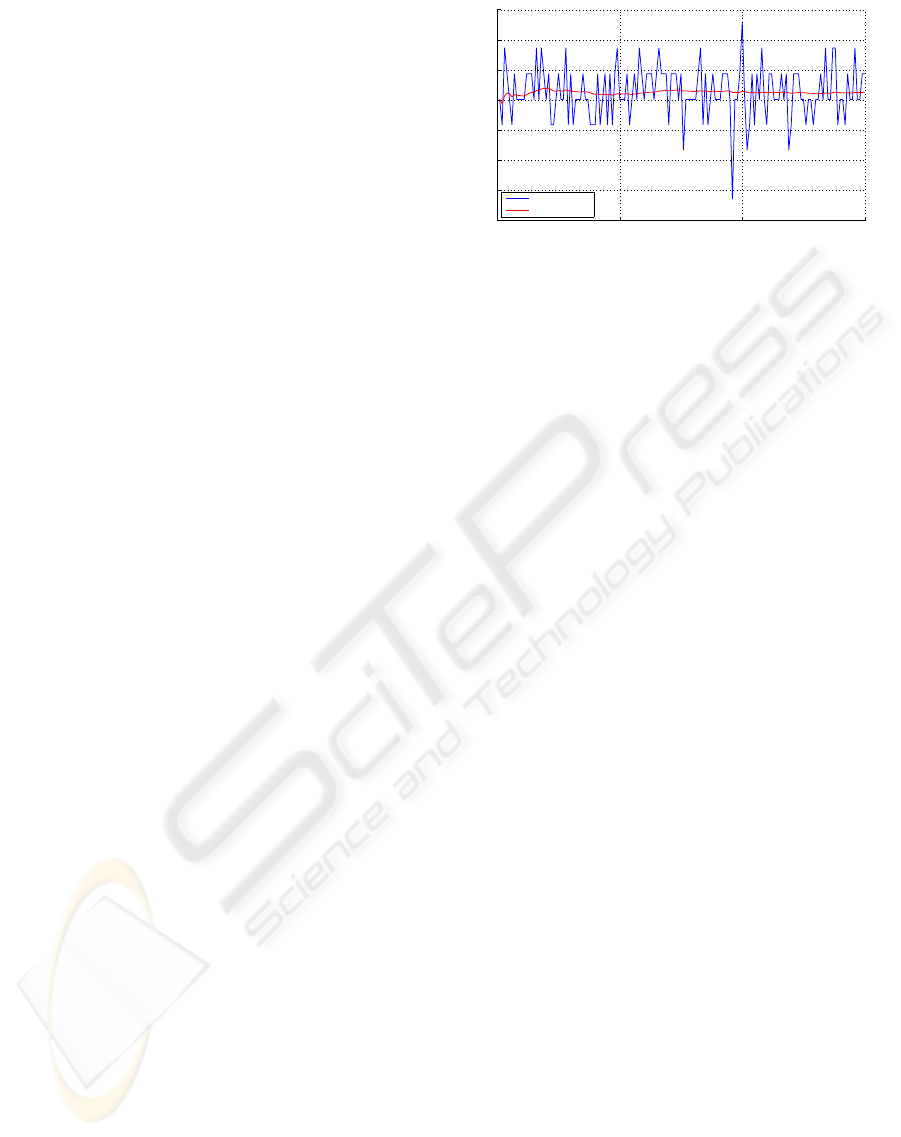
0 50 100 150
1530
1540
1550
1560
1570
1580
1590
1600
Sample index
Distance [cm]
Original
Kalman filtered
Figure 1: Kalman filtered vs. non-filtered depth values for
a single pixel in a static scene, q
d
= 0.001.
3.2.2 Free Space Marking
The occupancy grid is a direct top-down view of the
intensity image. If no occupied cell is found in a par-
ticular column, i.e. the direction of a ray from the
cameras focal point, all points in the real scene above
or below that ray are part of the free space up to the
vertical resolution of the occupancy grid.
4 EVALUATION
To evaluate the methods, a number of data sets have
been collected. Presented here is mainly one captured
on an electric vehicle with the camera at an angle of
65
◦
relative to the direction of travel, which is for-
ward.
4.1 State and Variance
To determine the effect on the state (the depth) of a
pixel in a stationary scene with a non-moving camera,
the first 150 frames of a single pixel is compared to
its Kalman filtered counterpart. Figure 1 shows this
for a depth of approximately 16 m. On average, the
variance was reduced from 52.14 to 4.10.
4.2 Density
The prediction property of the Kalman filter leads to
denser disparity maps, due to the accumulation of
measurements over time. Pixels which are predicted
for a given number of frames without being updated
with a new measurement are discarded to ensure stale
pixels do not degrade the occupancy grid. Note how
areas occluded in the raw disparity map (Figure 2a)
have a predicted depth in the Kalman filtered map
(Figure 2d), leading to a denser disparity map than
without ego-motion.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
166
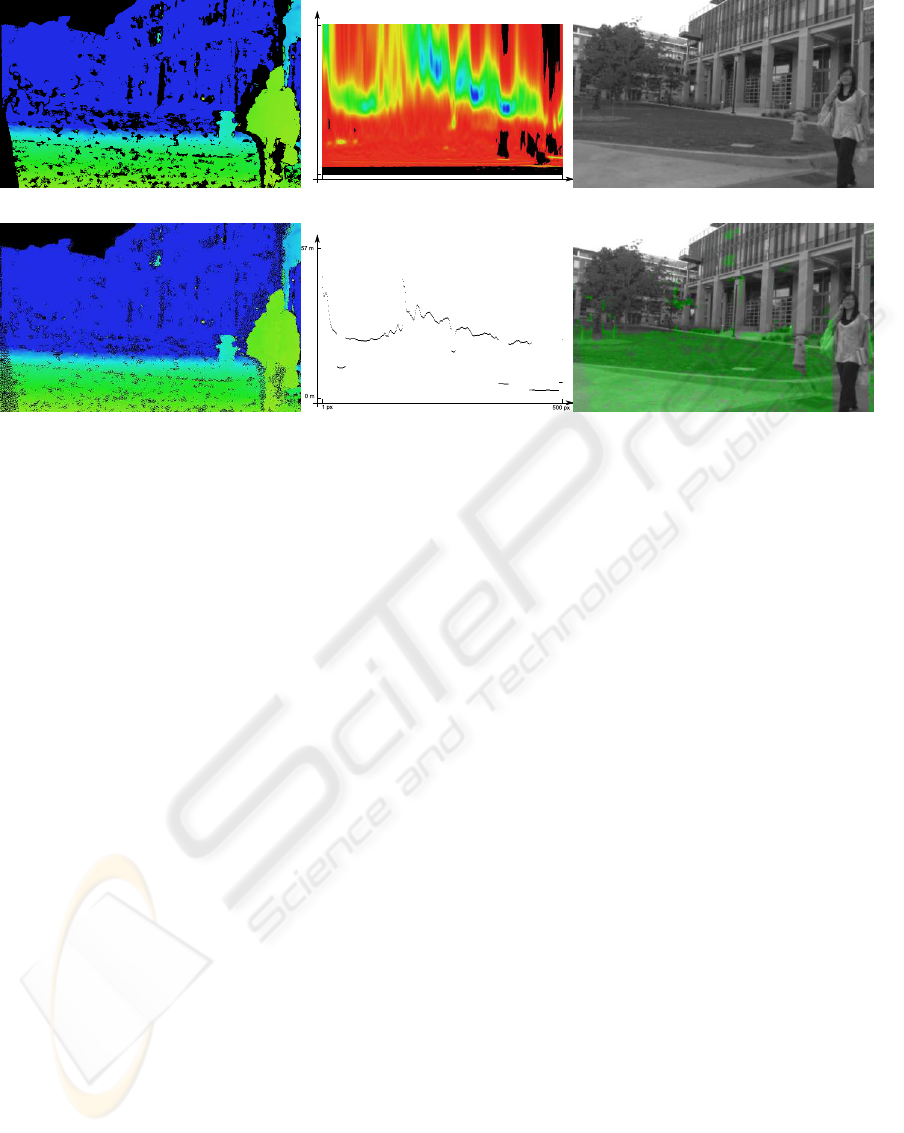
(a) Original disparity map.
1 px
500 px
0 m
57 m
(b) Full occupancy grid. (c) Left stereo image.
(d) Filtered disparity map. (e) Segmented. (f) Free space marked.
Figure 2: The steps undergone from stereo images to free space. They take place in the following order: (c) + right stereo
image → (a) → (d) → (b) → (e) → (f). In the last step, the depth of each pixel in (c) is looked up in (d), and if it is below the
line in (e) it is regarded as free space and marked green in (f).
4.3 Occupancy Grid and Free Space
Figure 2b is an example of an occupancygrid and Fig-
ure 2e of the resulting segmentation. The range of
depth represented by the occupancy grid is from 0 m
to 57 m. Also shown is the scene with (Figure 2f) and
without (Figure 2c) the free space marked.
5 CONCLUSIONS
We have shown how to estimate the free space in a
scene with a stereo camera. Iconic Kalman filtering
of the disparity maps increases density and reduces
per-pixel variance (noise), leading to more accurate
stochastic occupancy grids and ultimately yielding a
more confident estimation of the occupancy of the
scene. For a more detailed review see (Høilund,
2009).
REFERENCES
Badino, H., Franke, U., and Mester, R. (2007). Free space
computation using stochastic occupancy grids and dy-
namic programming. Workshop on Dynamical Vision,
ICCV, Rio de Janeiro, Brazil.
Elfes, A. (1989). Using occupancy grids for mobile robot
perception and navigation. Computer, 22(6):46–57.
Høilund, C. (2009). Free space computation from stochas-
tic occupancy grids based on iconic Kalman filtered
disparity maps. Master’s thesis, Aalborg University,
Laboratory of Computer Vision and Media Technol-
ogy, Denmark.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Transactions of the ASME–
Journal of Basic Engineering, 82(Series D).
Li, M., Hong, B., Cai, Z., Piao, S., and Huang, Q. (2008).
Novel indoor mobile robot navigation using monocu-
lar vision. Engineering Applications of Artificial In-
telligence, 21(3).
Mahalanobis, P. C. (1936). On the generalised distance in
statistics. In Proceedings National Institute of Sci-
ence, India, volume 2.
Matthies, L., Kanade, T., and Szeliski, R. (1989). Kalman
filter-based algorithms for estimating depth from im-
age sequences. International Journal of Computer Vi-
sion, 3(3):209–238.
Murray, D. and Little, J. (2000). Using real-time stereo vi-
sion for mobile robot navigation. Autonomous Robots,
8(2).
Trivedi, M. M., Gandhi, T., and McCall, J. (2007). Looking-
in and looking-out of a vehicle: Computer-vision-
based enhanced vehicle safety. Intelligent Transporta-
tion Systems, IEEE Transactions on, 8(1).
TYZX (2009). TYZX DeepSea Stereo Camera. [Online; ac-
cessed 20-November-09].
http://www.tyzx.com/
.
FREE SPACE COMPUTATION FROM STOCHASTIC OCCUPANCY GRIDS BASED ON ICONIC KALMAN
FILTERED DISPARITY MAPS
167
