
SETTING GRAPH CUT WEIGHTS FOR AUTOMATIC
FOREGROUND EXTRACTION IN WOOD LOG IMAGES
Enrico Gutzeit, Stephan Ohl, Arjan Kuijper, Joerg Voskamp and Bodo Urban
Fraunhofer Institute for Computer Graphics Research IGD, Joachim-Jungius-Str. 11, 18059 Rostock, Germany
Keywords:
Image segmentation, Graph cuts, Foreground extraction, Weight setting.
Abstract:
The automatic extraction of foreground objects from the background is a well known problem. Much research
has been done to solve the foreground/background segmentation with graph cuts. The major challenge is
to determine the weights of the graph in order to obtain a good segmentation. In this paper we address
this problem with a focus on the automatic segmentation of wood logs. We introduce a new solution to get
information about foreground and background. This information is used to set the weights of the graph cut
method. We compare four different methods to set these weights and show that the best results are obtained
with our novel method, which is based on density estimation.
1 INTRODUCTION
Graph-cut based segmentation techniques are a very
powerful tool in image segmentation. In interactive
image analysis, e.g. in medical imaging (F. Malmberg
and Borgefors, 2009), it is possible to get a good seg-
mentation with only a few refinements. In a fully au-
tomatic system there is no possibility for refinements
and so the problem of initialization of the graph-cut
algorithm, mainly setting the weights for the graph, is
a difficult problem. In this paper the problem is es-
pecially addressed to automatically and soundly seg-
ment wood log images.
The volume of wood and the sizes of the logs
are important factors of commercial and logistic pro-
cesses in timber industry. There are different methods
to measure the amount of wood. Most reliable tech-
niques are laser scanning methods or wood weighing
for volume analysis. These methods, however, are
mainly used in factories since they are relatively dif-
ficult to apply. In forests estimations are used often.
After logs have been cut they are piled up onto stacks.
The amount of cut wood is then estimated from the
front side of the stack. Furthermore, the distribution
of log diameters is estimated by visual judgment only.
It is described by a constant because measuring the di-
ameter of each log is impossible in practice.
Our aim is to use computer vision methods to
make these front side measurements faster and more
reliable. Separating the log cut surfaces from the
background leads to the well known problem of bi-
nary image segmentation. A robust automatic binary
segmentation allows more accurate volume estima-
tion techniques than the manual one described briefly
above. The imaging devices we use are mobile phone
cameras as these are lightweight common place de-
vices. On the other hand, their optics incorporate
some trade-offs on image quality. Furthermore, we
restrict ourselves to images taken from frontal posi-
tions.
The contribution of this paper is a methodology
for automatic and robust foreground / background
segmentation of these low quality wood log images.
We use a min-cut/max-flow graph-cut algorithm in
conjunction with a kd-tree accelerated density estima-
tion. Our novel density estimation improves current
approaches with respect to robustness and is relatively
simple to implement, which we call KD-NN in the
following. The methodology is split into two parts.
First, we make use of some properties of the image
structure to initiate models in color space. Second,
we used them to yield the final segmentation. The
graph-cut algorithm is used in both steps.
2 RELATED WORK
Our specific application has been considered in imag-
ing barely. (Fink, 2004) describes classical vision al-
gorithms and active contours to find the log cut sur-
faces. The proposed procedure is only half automatic
60
Gutzeit E., Ohl S., Kuijper A., Voskamp J. and Urban B. (2010).
SETTING GRAPH CUT WEIGHTS FOR AUTOMATIC FOREGROUND EXTRACTION IN WOOD LOG IMAGES.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 60-67
DOI: 10.5220/0002831000600067
Copyright
c
SciTePress

and makes a lot of assumptions about the type of
wood, the lighting conditions and the image quality.
The photos of the stack of wood are taken in a con-
trolled environment which makes the proposed algo-
rithms useless in our scenario.
In computer vision there is a variety of approaches
to tackle the binary segmentation problem (Jaehne,
2005). However, when it comes to stable and fully
automatic segmentation of natural images, things are
getting complicated. Normalized Cuts (Shi and Ma-
lik, 2000) are used to find a reasonable partition of the
image. But these kinds of algorithms are optimized in
order to solve the grouping problem in vision.
Instead, we focused on a quite popular binary seg-
mentation framework from the fields of combinatorial
optimization. Hereby, a graph-cut results from solv-
ing for the maximum flow (Boykov and Jolly, 2001).
The corresponding minimum cut then describes the
resulting partition of the image. There are algorithms
that are optimized for grid-graphs (Boykov and Kol-
mogorov, 2004) and provide a feasible solution in a
few seconds, even for megapixel sized images.
There are different approaches to set the weights
of the graph. The weights between two adjacent ver-
tices are set often by using some metric like the eu-
clidian for instance. While finding a pixel to pixel
distance is straight forward, existing algorithms differ
in setting the weights for the remaining edges to the
source and the sink node. A good and practical solu-
tion for gray scaled images is the usage of a histogram
which describes the two necessary distributions for
binary segmentation (Boykov and Jolly, 2001). In the
case of RGB images, it is more challenging to find
a model for the two distributions. In (C. Rothar and
Blake, 2004) a Gaussian Mixture Model (GMM) is
used for description. However, the method deals with
interactive segmentation. It is derived from (Orchard
and Bouman, 1991).
We implemented this GMM method and found it
unstable. The method is quite prone to outliers. In
interactive segmentation, this is not so important be-
cause the model can be changed quickly. But this does
not meet our requirements. Instead, in our compari-
son we replaced the method for estimating the GMMs
by the Expectation Maximization algorithm.
3 PROBLEM DISCUSSION
The volume especially the solid cubic meter of a stack
of wood is simple computable via a multiplication of
the area of the log cut surfaces with the depth. The
depth per stack of wood is known, but not the wood
surfaces. To determine the wood area from images,
the stack of wood must be taken from a frontal posi-
tion, whereby the log cut surfaces must be visible (see
figure 2).
To obtain the area of wood the image must first
transform into a real coordinate system, so that every
pixel has the same area in real square meter. Secondly,
a stack of wood often doesn’t fit into a single image.
Due to this problem more images must be taken from
one stack of wood and be stitched together. Thirdly,
a segmentation is required to separate the wood and
non-wood pixel. How to transform the images and
stitch them together is beyond the scope of this paper.
Therefore, we here only address the third problem, the
segmentation.
The objective is to separate automatically and
soundly the log cut surfaces from different images.
Log cut surfaces of a stack of wood in praxis vary
in shape and color. The shape of an log cut surface
seems to be a circle or an ellipse, but that is not ever
given in praxis (see figure 1). Therefore a shape find-
ing technique, e.g. ellipse fitting, cannot be applied.
Furthermore the color from one stack of wood to an-
other is different and dependent on the wood type,
whereby no general color matching is appropriate.
Figure 1: Logs with different shape and color.
Logs have a certain self-similarity, but in a dif-
ferent degree. Hence the usage of simple region
based methods, e.g. watershed or split and merge,
lead to the well known problem of under- or over-
segmentation. In summary, there is no exact color
or shape for all logs usable, but for one single stack
of wood the color is mostly similar and the gradients
between logs and non logs are often high.
For this reason we extract color information from
the image first and use this to segment the image. To
use both characteristics of local gradient and global
color a graph-cut approach is used.
4 OUR APPROACH
For our approach we require some general restrictions
on the image acquisition to have some context infor-
mation. First, the image needs to be taken from a
SETTING GRAPH CUT WEIGHTS FOR AUTOMATIC FOREGROUND EXTRACTION INWOOD LOG IMAGES
61

frontal position as mentioned earlier and the stack of
wood has to be in the center. Second, the upper and
lower area of the image must not contain log cut sur-
faces. This is realized in common praxis because a
stack of wood has a limited height (see also figure 2).
Figure 2: A sample image of a stack of wood.
In the following, the image part that represents
the log cut surfaces is called foreground and the re-
maining areas are called background. This follows
the common naming conventions in graph-cut papers.
The segmentation is generally split into two main
parts (see figure 3). In step one a region in the center
of the input image is used to extract information about
the log cut surfaces and the darker regions in between.
In this step a number of properties and a first graph-
cut with our novel KD-NN to set the graph weights
are used.
Figure 3: The two parts of the segmentation procedure.
Additionally, one subimage from the bottom and
one from the top are used to gain information about
the background. Both subimages are needed because
they represent characteristics of quite different parts
of the image, e.g. sky, forest, soil, snow or grass.
This information is used together with the back-
ground characteristics to apply graph-cut a second
time to the whole input image, but this time with dif-
ferent weight setting algorithms for later comparison.
Background characteristics means the objects in front
of and behind the stack of wood. All steps are de-
scribed in detail in the following sections.
4.1 Our Novel Approach for Fore- and
Background Extraction
The aim of the first part of the segmentation is to find
a first estimate for the foreground (log cut surfaces)
and background color models. These models are nec-
essary for the graph-cut algorithm to accurately seg-
ment the log cut surfaces. The following description
is also illustrated in figure 3.
Let I denote the input image of size m×n where m
is the height and n the width. We extract three subim-
ages from I. First, we extract a subimage I
c
from the
center region. The other two subimages, I
b1
and I
b2
,
are extracted from the top and bottom of I respec-
tively. Due to the constraints in image acquisition,
I
c
contains log cut surfaces only and the shadowed re-
gions in between whereas I
b1
and I
b2
contain regions
to be classified as background. We chose I
c
to be of
size ⌊
m
3
⌋ × ⌊
n
3
⌋. I
b1
and I
b2
are horizontal bars of size
⌊
m
20
⌋ × n. Our experiments have proven these dimen-
sions reasonable.
Whereas the pixels of I
b1
and I
b2
can directly be
used for the background model we need to segment
I
c
into foreground and background pixels. We do this
by using a stable novel method which is described in
detail in the following.
Segmenting I
c
is much easier than the segmenta-
tion of I because the difference in luminance between
the log cut surfaces and shadowed regions in between
is very strong. Nevertheless, muddy logs, different
types of wood and leaves are disturbing factors.
Hence, for a stable segmentation we use the inter-
section of two binary threshold segmentations where
each of these is performed in another color space. The
V-channel from the HSV color space is thresholded
directly. In RGB color space we use the observation
that wood surfaces often contain a strong yellow com-
ponent. Therefore, we extract Y from the RGB image
using the following equation pixel wise.
Y = max(min(R− B, G− B), 0) (1)
Both channels V and Y are automatically thresholded
by using the method in (Otsu, 1979). The resulting
binary images are V
b
and Y
b
. The intersection of both
T
fg
= V
b
∩Y
b
(2)
T
bg
= V
b
∩Y
b
(3)
results in a trimap T = (T
fg
, T
bg
, T
unknown
). T
fg
is the
foreground, T
bg
is the background and T
unknown
are
pixels of which it is not known, if they belong to
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
62

the foreground or the background. T
unknown
is ex-
panded further by morphological operators to ensure
definitely a clean segmentation.
To get a more accurate binary segmentation of I
c
a first graph-cut segmentation is used. The pixel sets
T
fg
and T
bg
are used to build the foreground and back-
ground model. The result is a binary segmentation
B = (B
fg
, B
bg
). For the final segmentation a second
graph cut is applied to I. The pixel set to describe the
foreground is B
fg
. The background model is built by
using the pixel set union B
bg
∪ I
b1
∪ I
b2
.
4.2 Graph-Cut and Weight Setting
Graph based image segmentation methods represent
the problem in terms of a graph G = (V, E). The
graph consists of a set of nodes v ∈ V and a set of
weighted edges e ∈ E connecting them. In an image
each node corresponds to a pixel which is connected
to its 4 neighbors. Additionally there are two special
nodes called terminals (sink and source), which rep-
resent foreground and background. Each node has a
link to either of the terminals.
In the following let w
r
be the weights of the edges
connecting pixels and terminals and let w
b
be the
weights of inter pixel edges. We assume that all
weights w
b
, w
r
for the graph are in the interval [0, 1].
A vector in feature space (RGB color space) is de-
noted by x.
For setting the w
b
, we applied the following for-
mula, whereby i and j indicate adjacent graph nodes.
w
b
= 1− e
−α∗kx
i
−x
j
k
1
(4)
We used the Manhattan Metric because it is a little
faster than the Euclidian Metric and the difference in
segmentation results was negligible for our images.
A higher choice for the value of the free parameters α
leads to more similarity between two feature vectors.
For setting the w
r
to the terminal nodes we imple-
mented four different feature space analysis methods,
each of which is described in detail in the following
subsections. In every case we built two models, one
for the foreground and one for the background respec-
tively. We did not introduce indices in the formulas to
keep the notation uncluttered.
After having set all weights, the min-cut/max-flow
algorithm from (Boykov and Kolmogorov, 2004) is
applied. The results of each of the four following
feature space analysis methods are presented and dis-
cussed in chapter 5.
In the following we describe four different meth-
ods to determine w
r
by using the foreground pixels
B
fg
and the background pixels B
bg
. Afterward the re-
sults will be present and compared.
4.2.1 Histogram Probability
A simple method to determine a probability is to use
a histogram. We used a 3D histogram to approx-
imate the distribution of the foreground and back-
ground over the color space. One bin of the histogram
represent a probability p
h
. The probability can be
used to determine w
r
. To reduce noise, we scale the
histogram with the factor hs ∈ [0, 1], which is experi-
mentally set and used for comparison. The number of
bins per color channel in our case is calculated with
⌊256∗hs⌋. Another problem of histograms are peaks,
which lead to many low probabilities. Peaks in our
case arise from many pixel with the same color in B
bg
or B
fg
. To get a suitable weight the histogram is nor-
malized first, so that the maximal bin has a probabil-
ity of 1. Afterward, the weights are determined by the
following equation, which get the best results in our
experiments.
w
r
= 1− e
−β∗sum
h
∗p
h
(5)
The sum
h
indicates the sum of all bins, p
h
the bin
value and so the probability of the corresponding
pixel and β is a free parameter.
4.2.2 K-Mean Clustering
Clustering is a common used method to groupingsim-
ilar points into different clusters. K-Mean is a simple
clustering algorithm and is often used to cluster the
color space. In our case we are applied K-Mean to
cluster the background and foreground pixels. The
results are k cluster with the mean m
i
, whereby i ∈
{1, ..., k}. To determine the weights different ways are
possible. One possibility is to find the nearest cluster
mean m
i
, calculate the distance d
min
between the pixel
and m
i
and directly determine the weight. Another
way is to determine the weights using the average of
all distances to all cluster means m
i
. Additionally the
amount of pixels per cluster can also be included for
weight computation. We experimentally found out,
that the best segmentation results are created by using
the euclidian distance to one cluster mean and the free
parameter γ by
w
r
= 1− e
−γ∗d
min
(6)
4.2.3 Gaussian Mixture Models
A Gaussian Mixture Models (GMM) is a compact
way to describe a density function. It may be seen
as a generalization of K-Means Clustering. The stan-
dard way to find the mean vectors and covariance ma-
trices of a GMM of K components is the Expectation
Maximization Algorithm. To speed up learning we
additionally sampled from our learning data.
SETTING GRAPH CUT WEIGHTS FOR AUTOMATIC FOREGROUND EXTRACTION INWOOD LOG IMAGES
63
When predicting from the model we can not take
the density function values directly to initialize the
weights of the graph. The reason therefor are very
small probability values and sharply peaked gaussian
components. Instead, we used it in a similar fashion
like the K-Mean Clustering. We left the normaliza-
tion factors out in the prediction phase, so our model
reduces to
w
r
=
K
∑
k=1
π
k
∗ exp(−
1
2
(µ
k
− x)
T
Σ
−1
(µ
k
− x)). (7)
The π
k
sum up to 1. That means the weights w
r
will lie in [0, 1]. The difference to the cluster centers
is anisotropic, whereby the simple K-Means approach
leads to isotropic differences. We notate this method
with EM-GMM in the following.
4.2.4 Our Novel Density Estimation by Nearest
Neighborhood
Our novel method is based on density estimation by
using a kd-tree, which we named KD-NN. To set the
weights to source and sink node we use two kd-tree
based models. The kd-trees contain all selected pix-
els and the associated values. One contains the fore-
ground and one the background pixels. So all infor-
mation is stored and used to set the weights in a later
step by using NN. The used model is similar to a pho-
ton map in (Jensen, 2001). A photon map contains
photons, our contains pixels. Both are used for den-
sity estimation. For fast NN search a balanced kd-tree
is needed. We use a data driven kd-tree and save a
pixel in relation to the color value. Each node of the
tree splits the color space by one dimension, stores
the position in color space and the number of pixels.
We built a balanced kd-tree (Jensen, 2001). Building
a kd-tree in this way is a O(n∗ logn) operation.
Similar to (Felzenszwalb, 2004) nearest neighbor-
hoods are involved. The NN are used for density esti-
mation and setting the region weights w
r
. Especially
for every graph node v the corresponding density in
color space within a sphere is used.
The first step is to determine the density in rela-
tion to all pixels in the kd-tree. Hence, the number
of pixels p
all
in the kd-tree and the volume of the
color space are used to calculate an overall density
ρ
all
. In our case, we use the RGB color space, where
R, G, B ∈ [0, 255], and compute the density
ρ
all
=
p
all
255
3
. (8)
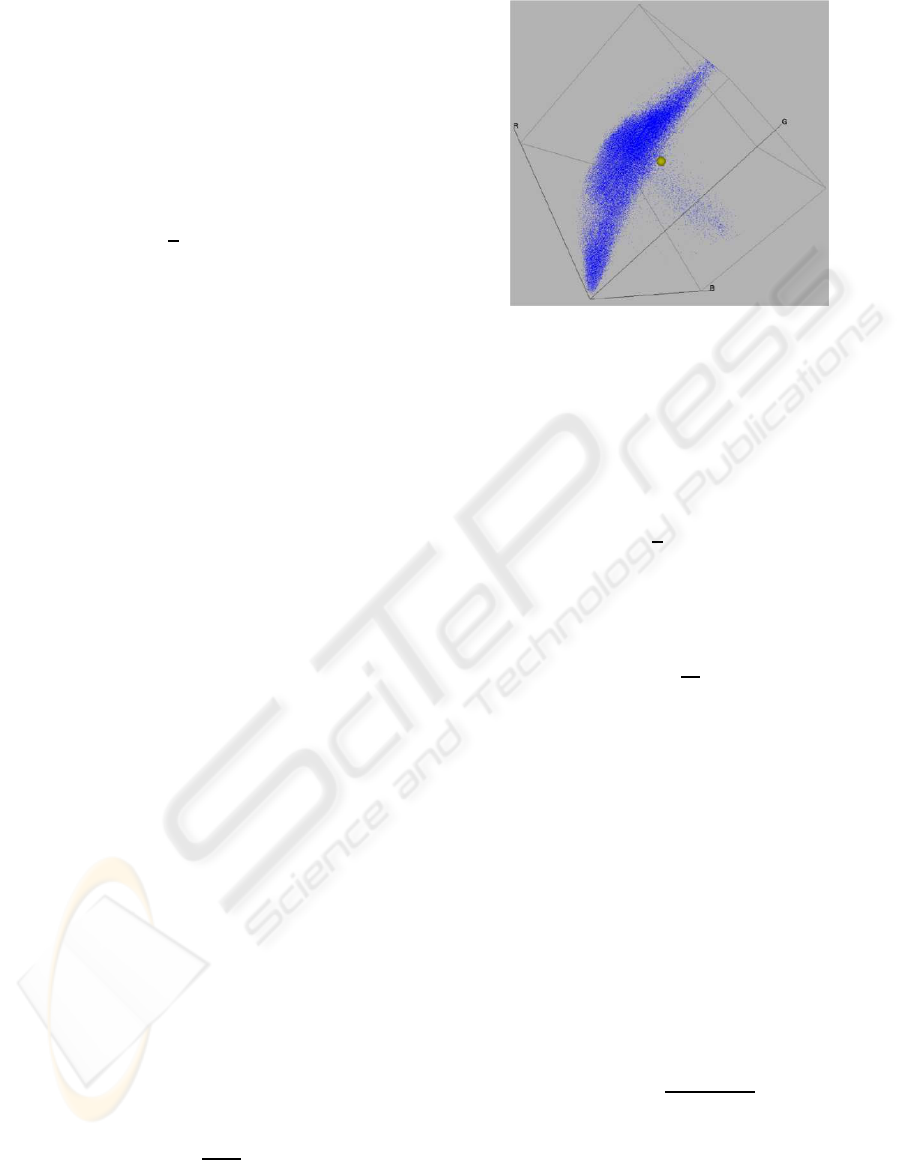
We estimate the density for every v by using its
sphere environment (see figure 4). The number of
pixels within this sphere with a predefined radius r is
Figure 4: The pixels of the log cut surfaces are visualized as
points in RGB color space. The yellow sphere demonstrates
the search environment for the density estimation. Also,
there is a number of outliers.
searched in the kd-tree. The NN search in a balanced
kd-tree is an O(log(n)) operation (Samet, 2006). The
volume of the search sphere v
s
is
v
s
=
3
4
∗ π∗ r
3
. (9)
The density ρ
s
within the sphere environment is
estimated by the number of found pixels p
s
. It is used
for the weight calculation in the following section.
ρ
s
=
p
s
v
s
(10)
The setting of w
r
is done by the density ρ
s
. How-
ever, the number of pixels in one kd-tree and hence
ρ
all
is different and depends on the foreground and
background pixels. Hence, we use the overall density
ρ
all
to determine a factor s, which is taken for weight
computation.
The idea is to map the overall density ρ
all
, which
is also the mean density from the spheres in all possi-
ble positions, to a defined weight w
m
. So, if the mean
density is found, the weight w
b
will be equal to w
m
.
In addition, a greater density than ρ
all
must produce a
high weight and a lower density a low weight, which
all must be in the interval [0, 1]. Therefore, the factor
is determinated by the following equation.
w
m
= 1 − e
−ρ
all
∗s
(11)
s =
ln(1− w
m
)
−ρ
all
(12)
Finally, the region weights are estimated by the den-
sity in the search sphere and the predetermined factor
s by
w
r
= e
−ρ
s
∗s
. (13)
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
64

5 RESULTS
We tested our approach on images taken by employ-
ees from forestry. Due to the image acquisition with a
mobile phone, our tested input images are jpeg com-
pressed with maximal resolution of 2048× 1536 pix-
els. In our application we implemented the weight
computation in four different ways as described be-
fore. All methods determine the edge weights w
b
as
specified in 4.2 but differ in the calculation of the w
r
.
In our novel approach the graph-cut is processing
twice. To compare the different methods the same
weight setting for graph-cut in the presegmentation
is used. Hence the same conditions, especially the
same foreground B
fg
and background pixels B
bg
, are
given for the second graph-cut. We generally used
the best method for setting the weights our KD-NN
for the graph cut segmentation as evaluated later. In
figure 5 and 6 the different states of the presegmenta-
tion and the final result of the input image (figure 2)
are shown. Thereby the image quality improves over
the consecutive steps.
(a) (b)
(c) (d)
Figure 5: The different steps of the presegmented center im-
age are shown. Image (a) shows the thresholded modified
Y-channel, (b) the thresholded V-channel and (c) the inter-
section of (a) and (b). In Image (d) the result of the first
graph cut with KD-NN is shown.
For the comparison of the different weight set-
ting methods including our novel KD-NN from sec-
tion 4.2, we performed a ground truth test. Therefore
71 very different sample images with wood logs were
marked and the difference to the segmentation result
were measured as shown in figure 7. We experimen-
tally choose the best parameter to determine w
r
. The
weights created with the histogram were calculated
with β = 1000. For K-Mean γ was set to 0.02 and for
our KD-NN w
m
= 0.5 and r = 2.5 were used. For all
methods we used α = 0.0005 for w
b
.The simple RGB
color space, where R, G, B ∈ [0, 255] was used in all
methods.
Figure 6: The final segmentation of the second graph-cut
run with KD-NN by using the presegmented center image,
which is shown in figure 5.
We measured the difference to the ground truth by
three values. The first is the percent amount of too lit-
tle segmented pixels, which are notated as false neg-
ative. The second is the percent amount of too much
segmented pixels and the third the sum of them, which
is also the general error in the segmentation. This all
is in relate to the number of pixels in the image. Fur-
thermore we calculate the standard derivation of the
values. The table 1 shows the three measured values
for the different methods.
In table 1 it can be seen, that our KD-NN leads
to the least general segmentation error. The K-Mean
with eight clusters, whereby each cluster is initial po-
sitioned in one corner of the color cube, lead to similar
results. The Histogram generally gives the worst re-
sults and the EM-GMM is a little better. K-Mean and
KD-NN are the best methods for setting the weights
in our application, whereby KD-NN performs slightly
better.
6 CONCLUSIONS AND FUTURE
WORK
We present a novel method to segment accurately log
cut surfaces in pictures taken from a stack of wood
by smart phone cameras using the min-cut/maxflow
framework. If certain restrictions on the image acqui-
sition are made, the described approach is robust un-
der different lighting conditions and cut surface col-
ors. Robustness stems from our new, relatively simple
and easy to implement density estimation. We com-
pared our method with other approached and showed
that we mostly outperformed them. Our method lead
to similar results as K-Mean clustering of the color
space. However, our method is faster because of the
kd-tree we are using. It is also robuster against out-
liers, which can be a problem using K-Means cluster-
SETTING GRAPH CUT WEIGHTS FOR AUTOMATIC FOREGROUND EXTRACTION INWOOD LOG IMAGES
65

Table 1: The measured difference to the ground trues for all methods are shown here. The standard derivations are represented
in brackets.
Method number of bins amount of cluster false negative false positive false segmented
Histogram 16 - 14, 62(17, 04) 11, 29(14, 36) 25, 91(14, 74)
Histogram 32 - 7, 8(12, 33) 8, 95(9, 94) 16, 75(12)
Histogram 64 - 3, 45(5, 52) 7, 85(8, 32) 11, 3(8, 23)
Histogram 128 - 2, 62(3, 38) 7, 72(8, 12) 10, 34(7, 57)
Histogram 256 - 2, 73(2, 45) 7, 73(7, 99) 10, 46(7, 2)
EM-GMM - 2 4, 28(4, 44) 4, 87(4, 46) 9, 15(4, 64)
EM-GMM - 4 4, 02(4, 69) 5, 23(4, 31) 9, 25(4, 92)
EM-GMM - 8 3, 72(3, 91) 5, 57(4, 59) 9, 29(4, 67)
EM-GMM - 12 3, 75(3, 94) 5, 75(4, 91) 9, 5(4, 87)
EM-GMM - 16 3, 63(3, 87) 5, 9(4, 9) 9, 53(4, 75)
K-Mean - 8 3, 69(3, 93) 4, 29(3, 1) 7, 98(4, 27)
KD-NN - - 2, 38(3, 03) 5, 35(3, 67) 7, 73(3, 94)
(a) Sample Image (b) Ground Truth (c) Histogram (d) K-Mean (e) EM-GMM (f) KD-NN
(g) Sample Image (h) Ground Truth (i) Histogram (j) K-Mean (k) EM-GMM (l) KD-NN
(m) Sample Image (n) Ground Truth (o) Histogram (p) K-Mean (q) EM-GMM (r) KD-NN
(s) Sample Image (t) Ground Truth (u) Histogram (v) K-Mean (w) EM-GMM (x) KD-NN
Figure 7: Segmentation of four sample images (a),(g),(m),(s), the ground truth images and the corresponding results. Thereby
the best parameter were experimentally chosen for each method. For the segmentation with the histogram 32 bins per color
channel were used. For the K-Mean and EM-GMM segmentation eight foreground and background clusters were applied.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
66

ing. We used a constant search radius which works
very well for our application. This radius might be
need to be set slightly variable in a more general set-
ting.
REFERENCES
Boykov, Y. and Jolly, M. P. (2001). Interactive graph cuts
for optimal boundary region segmentation of object in
n-d images. In Int. C. Comput. Vision, pages 105–112.
Boykov, Y. and Kolmogorov, V. (2004). An experimental
comparision of min-cut/max-flow algorithms for en-
ergy minimation in vision. In PAMI, pages 1124–
1137.
C. Rothar, V. K. and Blake, A. (2004). Grabcut - inter-
active forground extraction using iterated graph cuts.
In ACM Transactions on Graphics, pages 309–314.
ACM Press.
F. Malmberg, C. O. and Borgefors, G. (2009). Binarization
of phase contrast volume images of fibrous materials
- a case study. In International Conference on Com-
puter Vision Theory and Applications 2009, pages 97–
125.
Felzenszwalb, P. F. (2004). Efficent graph-based image seg-
mentation. In International Journal of Computer Vi-
sion, pages 888–905.
Fink, F. (2004). Foto-optische erfassung der dimension von
nadelrundholzabschnitten unter einsatz digitaler bild-
verarbeitender methoden. In Dissertation. Fakultaet
fuer Forst- und Umweltwissenschaften der Albert-
Ludwigs-Universitaet Freiburg i. Brsg.
Jaehne, B. (2005). Digital Image Processing. Springer Ver-
lag, Berlin Heidelberg, 6th reviewed and extended edi-
tion edition.
Jensen, H. W. (2001). Realistic Image Synthesis Using Pho-
ton Mapping. The Morgan Kaufmann Series in Com-
puter Graphics.
Orchard, M. and Bouman, C. (1991). Color quantization of
images. In IEEE Transactions on Signal Processing,
pages 2677–2690.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. In IEEE Transactions on Systems,
Man and Cybernetics, pages 62–66.
Samet, H. (2006). Foundations of Multidimensional and
Metric Data Structures. The Morgan Kaufmann Se-
ries in Computer Graphics.
Shi, J. and Malik, J. (2000). Normalized cuts and image
segmentation. In IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, pages 888–905.
SETTING GRAPH CUT WEIGHTS FOR AUTOMATIC FOREGROUND EXTRACTION INWOOD LOG IMAGES
67
