
UNDERSTANDING OBJECT RELATIONS IN TRAFFIC SCENES
Irina Hensel, Alexander Bachmann, Britta Hummel and Quan Tran
Department of Measurement and Control, Karlsruhe Institute of Technology, 76131 Karlsruhe, Germany
Keywords:
Intelligent vehicles, Object relations, Markov logic.
Abstract:
An autonomous vehicle has to be able to perceive and understand its environment. At perception level objects
are detected and classified using raw sensory data, while at situation interpretation level high-level object
knowledge, like object relations, is required. In order to make a step towards bridging this gap between low-
level perception and scene understanding we combine computer vision models with the probabilistic logic
formalism Markov logic. The proposed approach allows for joint inference of object relations between all
object pairs observed in a traffic scene, explicitly taking into account the scene context. Experimental results
based on simulated data as well as on automatically segmented traffic videos from an on-board stereo camera
platform are provided.
1 INTRODUCTION
To enable autonomous driving, a vehicle has to per-
ceive and interpret its environment with respect to the
driving task. Perception in this context refers to the
detection and classification of objects based on raw
sensory data, whereas interpretation denotes inferring
and manipulating high-level scene descriptions based
on this data, such as relations between objects and
driver intentions. Methods from the field of cog-
nitive vision aim at bridging the gap between per-
ception and interpretation, by using abstracted sen-
sor data together with explicitly encoded prior knowl-
edge and inference procedures (Vernon, 2006). This
prior knowledge typically takes the form of frequently
occurring spatial and temporal relations between do-
main objects. A couple of formalisms have been
applied to model and exploit such knowledge, such
as: probability theory (Howarth and Buxton, 2000),
frames (Hotz et al., 2008), description logic (Neu-
mann and M
¨
oller, 2008) (Hummel et al., 2008), Sit-
uation Graph Trees (Arens et al., 2004), Scenarios
(Georis et al., 2006) and lately Markov logic (Tran
and Davis, 2008). Typical applications of such meth-
ods include surveillance tasks, interpretation of aerial
images or analysis of traffic situations. Some related
work that links traffic videos to conceptual relational
knowledge is outlined in the following. (Howarth and
Buxton, 2000) derive conceptual representations of
events from model-based object tracking data com-
puted on traffic videos from a roundabout.
(Cohn et al., 2006) overview a system that can learn
traffic behaviour using qualitative spatial relation-
ships among close objects travelling along learned
paths. Another system, presented in (Gerber and
Nagel, 2008), imports extracted geometrical trajec-
tories from inner-city monocular videos into a con-
ceptual representation of elementary vehicle actions
based on a fuzzy metric-temporal Horn logic. The
same knowledge formalism is used in (Fern
´
andez
et al., 2008) as a basis for an integrative architecture
of a cognitive vision system, which extracts textual
descriptions of a recorded pedestrian crossing sce-
nario. (Arens et al., 2004) demonstrate that high-level
hypotheses about intended vehicle behaviour can be
used to improve tracking under occlusion. The next
two recent works use Markov logic as a representation
language. That is a novel probabilistic logic formal-
ism, which can handle uncertain and imperfect data
(Richardson and Domingos, 2006). (Tran and Davis,
2008) addresses the task of visual recognition of inter-
actions of people and vehicles at a parking lot. (Bach-
mann and Lulcheva, 2009) classifies multiple inde-
pendently moving objects by taking into account ex-
isting object relations.
With the exception of (Bachmann and Lulcheva,
2009) all publications mentioned use videos recorded
from static cameras. Furthermore, relations between
object pairs are inferred without taking scene context
into account. This can lead to a globally implausible
scene description since it is hard to detect noise and
outliers in the sensor data.
389
Hensel I., Bachmann A., Hummel B. and Tran Q. (2010).
UNDERSTANDING OBJECT RELATIONS IN TRAFFIC SCENES.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 389-395
DOI: 10.5220/0002832603890395
Copyright
c
SciTePress

To address these issues, this contribution presents
an approach that allows for joint inference of relations
between all object pairs in a scene, thus explicitly tak-
ing into account the scene context. Moreover, traf-
fic videos are acquired from a stereo camera platform
that is mounted inside a moving vehicle.
The proposed system automatically segments im-
ages into object hypotheses. Motion profile and posi-
tion in space are estimated for every object hypothe-
sis. This quantitative sensor data is mapped onto sym-
bols and an evidence file is generated. Markov logic
models for understanding object relations in a traffic
scene are developed and trained on a set of traffic im-
ages. The evidence together with the trained model
are provided as input to the Markov Logic reasoner.
As a result conditional probabilities for the validity of
the modelled object relations between every two ob-
jects in the scene are computed.
This paper is organised as follows: next section
will give a short theoretical introduction to Markov
logic. Then the vocabulary used in our traffic scene
models is introduced in form of an ontology. Sec-
tion 4 describes the traffic scene models developed in
Markov logic. Finally, Section 5 provides experimen-
tal results on simulated and real data.
2 MARKOV LOGIC
Markov logic combines first-order logic with Markov
random fields. It provides a framework for explicitly
modeling relations in complex domains, while taking
into account uncertainties and performing probabilis-
tic inference (Richardson and Domingos, 2006). A
Markov logic network (MLN) L consists of a set of
weighted logic formulae (F
m
, g
m
) describing a spe-
cific domain. The formulae F
m
are constructed from
logical atoms (e.g. sceneObject(o)) linked with log-
ical connectives and quantifiers. The attached real
valued weights g
m
validate the assertions stated over
the domain by the corresponding formulae and can be
learned from training data. Given L and a finite set of
logical constants B (e.g. O1) all possible groundings
of each logical atom X (e.g. sceneObject(O1)) and
all possible groundings of each formula G can be in-
stantiated by substituting all (typed) variables by con-
stants from B. Each ground formula in G is assigned
the weight of the underlying first-order formula from
L. The set of ground atoms X can be seen as a set of
binary random variables and therefore be represented
by an Markov random fields M(L, B), which has a bi-
nary node for every X
m
. The value of a node is 1, if
the corresponding ground atom is true and 0 other-
wise. There is an edge between two nodes of M(L, B)
iff the corresponding ground atoms appear together in
at least one element of G. Thus, all ground atoms of
a ground formula constitute a clique in M(L, B). The
state x
{m}
of the m-th clique is evaluated by the fea-
ture f
m
(x
{m}
) ∈ {0, 1} of the corresponding ground
formula from G and by the weight g
m
assigned to it.
The value of the feature f
m
(x
{m}
) is 1, if G
m
is sat-
isfied by x
{m}
, i.e. if the ground formula is true. The
joint distribution of M(L, B) is
P(X = x) = Z
−1
exp
∑
m
g
m
f
m
(x
{m}
)
,
where Z is a normalization factor. Algorithms for
learning and inference in MLNs are implemented in
the open-source package Alchemy (Kok et al., 2007)
and have been used throughout this work.
3 ONTOLOGY
Knowledge about object attributes and object rela-
tions to other scene objects is described using a de-
fined vocabulary. Figure 1 shows the pictorial rep-
resentation of the ontology formalised in first-order
logic. The arity of each predicate symbol, that is
the number of its typed logical variables, is shown in
brackets (as e.g. hasSpeed(object,speed)).
isa
sceneObject(1)
cross(2)
follow(2)
distance
speed
Zero
relation
flank(2)
Close
VeryClose
VeryLow
name
.
.
.
.
.
.
difference
Equal
hasDiffIn
Orient(3)
Crossing
Opposite
position
N
NW
.
.
.
moveTowards(2)
movePast(2)
moveAwayFrom(2)
approachOncoming(2)
flankOncoming(2)
leaveOncoming(2)
approachCrossing(2)
leaveCrossing(2)
hasSpeed
(2)
hasRelPos
(3)
hasDistance
(3)
Figure 1: Object relation ontology. In order to maintain
readability some conceptual values of the object attribute
classes are left out. The numbers in brackets denote the ar-
ity of each predicate symbol.
Object Attributes. The scene object concept is
connected with all modelled object attributes (see
Figure 1). One can distinguish between self object
attributes, which refer to one object, and relative
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
390
10°
80°
100°
-10°
NW
N
NE
S
E
W
SW SE
v
y
x
v
1
v
2
y
1
y
2
Dy y y=| - |
1 2
|Δψ| [°] difference
0 £ y £ 30 Equal
30 < y £ 150 Crossing
150 < y £ 180 Opposite
(a)
5
20 70 250[m]
V
e
r
y
C
l
o
s
e
C
l
o
s
e
M
e
d
i
u
m
Far
V
e
r
y
F
a
r
(b)
(c)
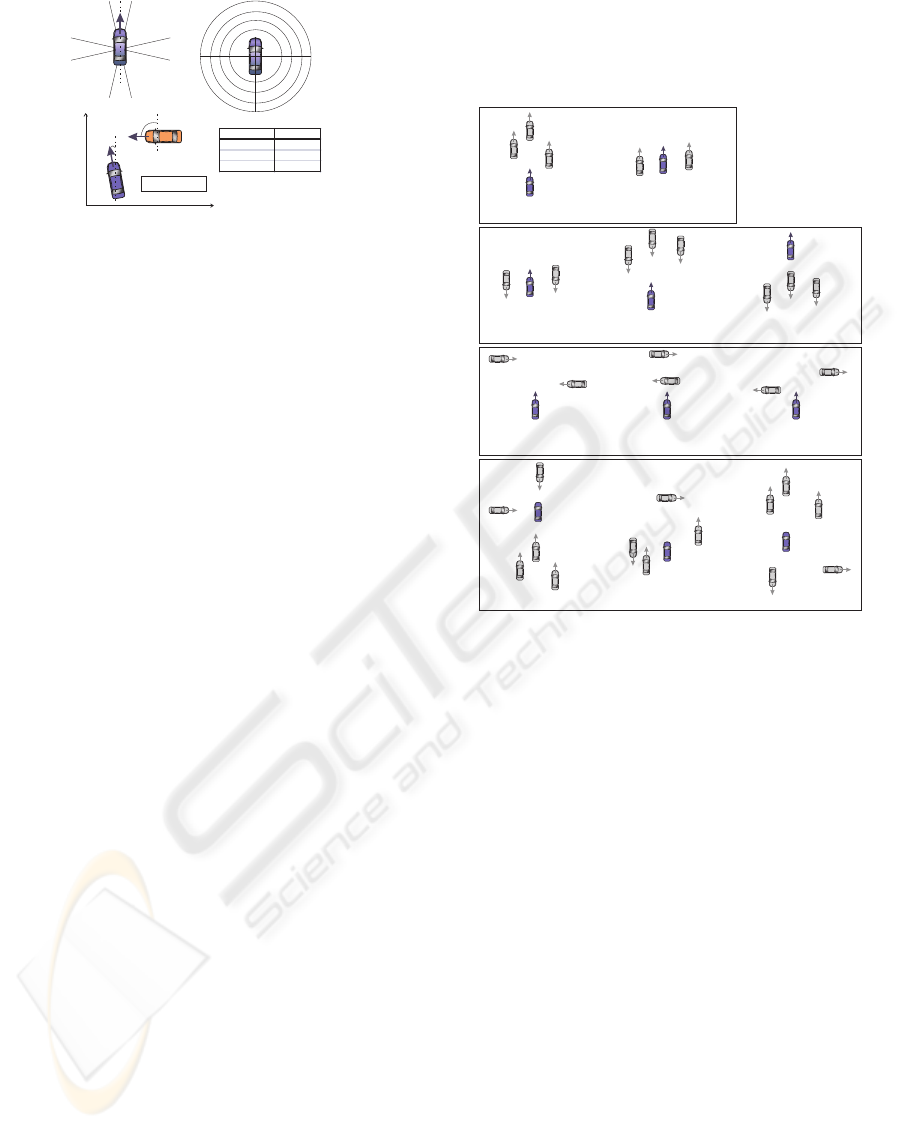
Figure 2: Conceptual values for relative position, relative
distance and relative orientation.
object attributes, which refer to two objects. Respec-
tively, there is a predicate symbol of proper arity that
explicates each of these links. The quantitative value
range of every modelled attribute is discretised in a
proper set of conceptual values that are formalised
as logical terms (e.g. VeryLow). The modelled object
attributes are: speed - object speed; difference - dif-
ference in orientation between two objects; position -
relative position between two objects and distance -
relative distance between two objects. All conceptual
values of an object attribute are modelled as pairwise
disjoint and jointly exhaustive (see Figure 2).
Object Relations. An object relation in this work de-
notes an elementary action of a traffic participant sup-
plemented by a reference to another relevant scene
object. All object relations depicted in Figure 1 are
formalised as predicates of arity 2 with both variables
being of type object, as e.g. follow(object,object). Ev-
ery object relation is specified for the second entry
(primary object) with respect to the first one (refer-
ence object), e.g. follow(O1,O2) reads “O2 follows
O1”. The object relations represent general relations
between two moving objects or between a moving and
a standing object. The meaning of each object relation
is visualised in Figure 3.
4 MODEL
This section introduces several traffic scene models
developed in Markov logic. They consist of a number
of first-order logic rules formulated with the predi-
cates introduced in the previous section. These rules
can be divided into hard and soft rules. Hard rules are
assumed to be deterministic and obtain a large pos-
itive weight attached without a training phase. Soft
rules make assertions over the domain that are only
typically true. The weights associated with them
are learned from hand-labeled training data generated
from images of urban, rural road and highway traffic
scenes.
Thereby all free logical variables in the examples
below are to be considered as implicitly universally
quantified.
O1
O2
O2
O2
follow(O2,O1)
O1
O2
O2
flank(O2,O1)
flank(O1,O2)
O1
O2
O2
flankOncoming(O2,O1)
flankOncoming(O1,O2)
O1
O2
O2
approachOncoming(O2,O1)
approachOncoming(O1,O2)
O1
O2
O2
leaveOncoming(O2,O1)
leaveOncoming(O1,O2)
O2
O2
O1
O2
O2
approachCrossing(O2,O1)
approachCrossing(O1,O2)
O1
O2
O2
cross(O2,O1)
cross(O1,O2)
O1
O2
O2
leaveCrossing(O1,O2)
O1
(v=0)
O2
O2
O2
moveTowards(O1,O2)
O1
(v=0)
O2
O2
O2
movePast(O1,O2)
O1
(v=0)
O2
O2
O2
moveAwayFrom(O1,O2)
O2
O2
O2
O2
O2
Figure 3: Exemplary traffic scenes visualising the meaning
of the object relations.
4.1 Object Relations MLN (OR MLN)
Object Relations MLN (OR MLN) models dependen-
cies between the introduced object attributes and ob-
ject relations. In the training phase for this MLN a
formal definition of object relations in terms of object
attributes is learned.
In OR MLN hard formulae describe the taxonomi-
cal structure of the object attribute predicates and their
properties, such as symmetry or disjointness. The
predicates hasRelDist and hasDiffInOrient describe
symmetric relative object attributes, while hasRelPos
is unsymmetric.
Soft rules model the correspondence between ob-
ject attribute values and object relations. There
are rules that explicit the dependencies between the
movement state of two different objects and the
present object relation, e.g. if both objects are stand-
ing still none of the introduced object relations is
valid, if both objects are moving none of the relations
moveTowards, movePast and moveAwayFrom is valid,
and if one of the objects is moving and the other is
standing, then none of the object relations, represent-
ing occurrences between two moving objects, is valid.
UNDERSTANDING OBJECT RELATIONS IN TRAFFIC SCENES
391
Further, there are a set of rules that link the remain-
ing three modelled object attributes with each of the
object relations, e.g. :
!(o1=o2) ∧ hasRelPos(o1,o2,+p) ⇒ follow(o1,o2)
!(o1=o2) ∧ hasRelDist(o1,o2,+dist) ⇒ follow(o1,o2)
!(o1=o2) ∧ hasDiffInOrient(o1,o2,+d) ⇒ follow(o1,o2)
In the syntax of Markov logic a “!” denotes logical
negation. The plus operator preceding the variables
in the above example makes it possible to learn a sep-
arate weight for each formula obtained by grounding
the variable with every possible conceptual value of
the corresponding object attribute. This can be in-
terpreted as learning a “soft definition” for every ob-
ject relation. The weights of the soft rules are learnt
using the discriminative training algorithm from the
Alchemy system (Kok et al., 2007).
The full OR MLN consists of the defined hard
rules and the soft rules with learned weights. It softly
defines the object relations in terms of the object at-
tributes. Figure 3 visualises several examples of these
learned definitions for each object relation. Symmet-
ric object relations are indicated in the Figure.
4.2 Scene Consistency MLN (SC MLN)
Using OR MLN one can infer the present object rela-
tions between all possible pairs of objects in a traffic
scene given the object attributes. Thereby all object
relations are inferred jointly. However, uncertainties
in the measurement of the object attributes can still
lead to a globally inconsistent scene description. This
is addressed within the Scene Consistency MLN (SC
MLN), which models which object relations may be
valid at once among three scene objects.
SC MLN consists of soft rules constructed with
object relation predicates only. Despite of rules that
state which object relations are symmetrical, there are
a number of rules that describe plausible object rela-
tions between three different scene objects, such as:
!(o0=o1) ∧ !(o0=o2) ∧ !(o1=o2) ∧
follow(o1,o0) ∧ follow(o1,o2) ⇒
follow(o0,o2) ∨ follow(o2,o0) ∨ flank(o2,o0)
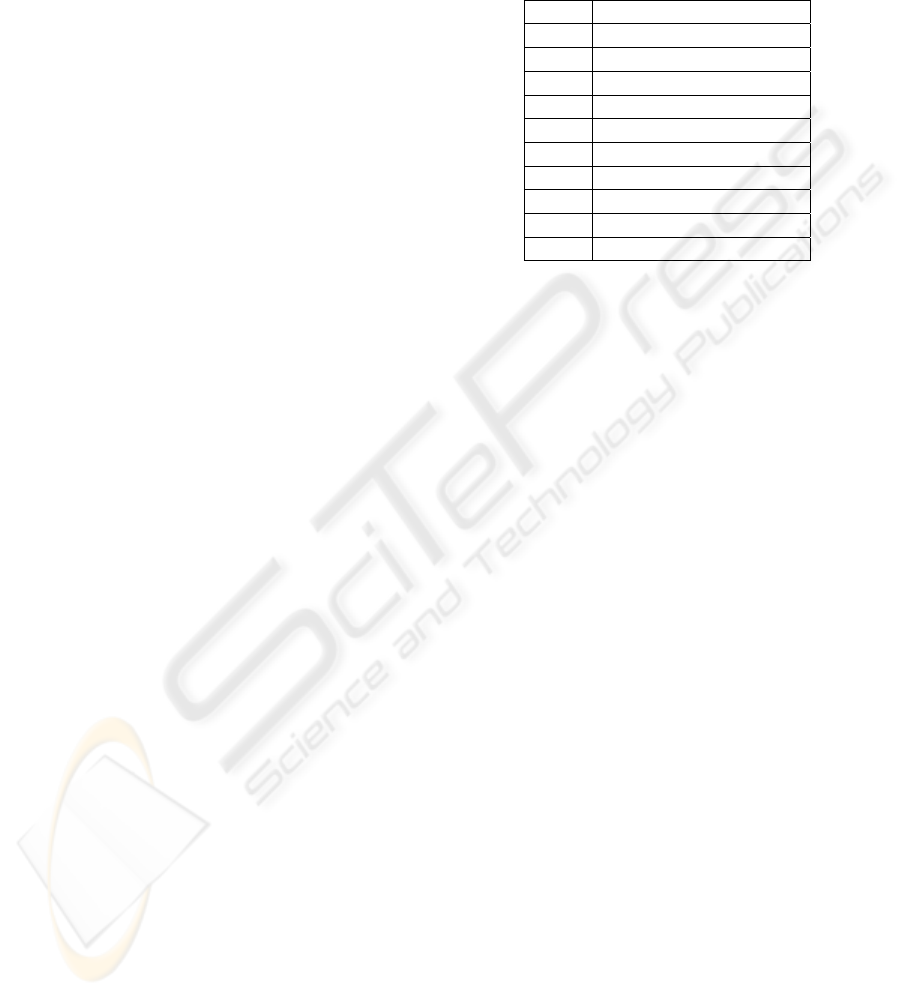
All combinations of object relations with three objects
are modelled. Figure 4 shows all constructed rules in
a schematic way. The abbreviations used are listed in
Table 1. All of these formulae are constructed analo-
gously to the one written above. The rows and lines
in Figure 4 contain the predicates from the left side of
the formula and the corresponding matrix entry con-
tains the right side of the formula (the possible plau-
sible object relations for this case). The formula from
above, for example, is build from row one and line
one.
The constructed rules are trained generatively on
hand labeled training data. The weighted knowledge
base forms the SC MLN.
Table 1: Abbreviations of object relation predicates used in
Figure 4.
fo10 follow(o1,o0)
fl10 flank(o1,o0)
aO10 approachOncoming(o1,o0)
fO10 flankOncoming(o1,o0)
lO10 leaveOncoming(o1,o0)
aC10 approachCrossing(o1,o0)
lC10 leaveCrossing(o1,o0)
c10 cross(o1,o0)
mT20 moveTowards(o2,o0)
mP20 movePast(o2,o0)
mA20 moveAwayFrom(o2,o0)
4.3 SCOR MLN
SCOR MLN stands for the combination of the above
presented SC MLN and OR MLN. It consists of all
hard rules and weighted soft rules of both MLNs.
While OR MLN models relations between object
pairs, SC MLN models the plausibility of a scene as a
whole. Thus SCOR MLN allows for a global look at
a traffic scene.
4.4 Evidence/ Inference
The available quantitative information about do-
main objects is mapped onto logical constants us-
ing qualitative abstraction. The constants represent
objects (e.g. O1), conceptual values of self object
attributes (e.g. Zero) or conceptual values of rel-
ative object attributes (e.g. NW). The set of true
ground atoms resulting from the abstracted constants
(sceneObject(O1), hasSpeed(O1,Zero), etc.) is the ev-
idence given as input to the reasoner.
Based on the MLN and evidence, a grounded
Markov network specifying the joint distribution is
constructed and the conditional probability that a par-
ticular ground atom is true, can be inferred (e.g. that
O1 follows O2). This way the probability that a par-
ticular object relation holds can be estimated for every
evidence object pair at every discrete time step.
5 EXPERIMENTS
Experiments were carried out on simulated data as
well as on automatically segmented traffic image se-
quences. In all experiments the MC-SAT Algorithm
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
392
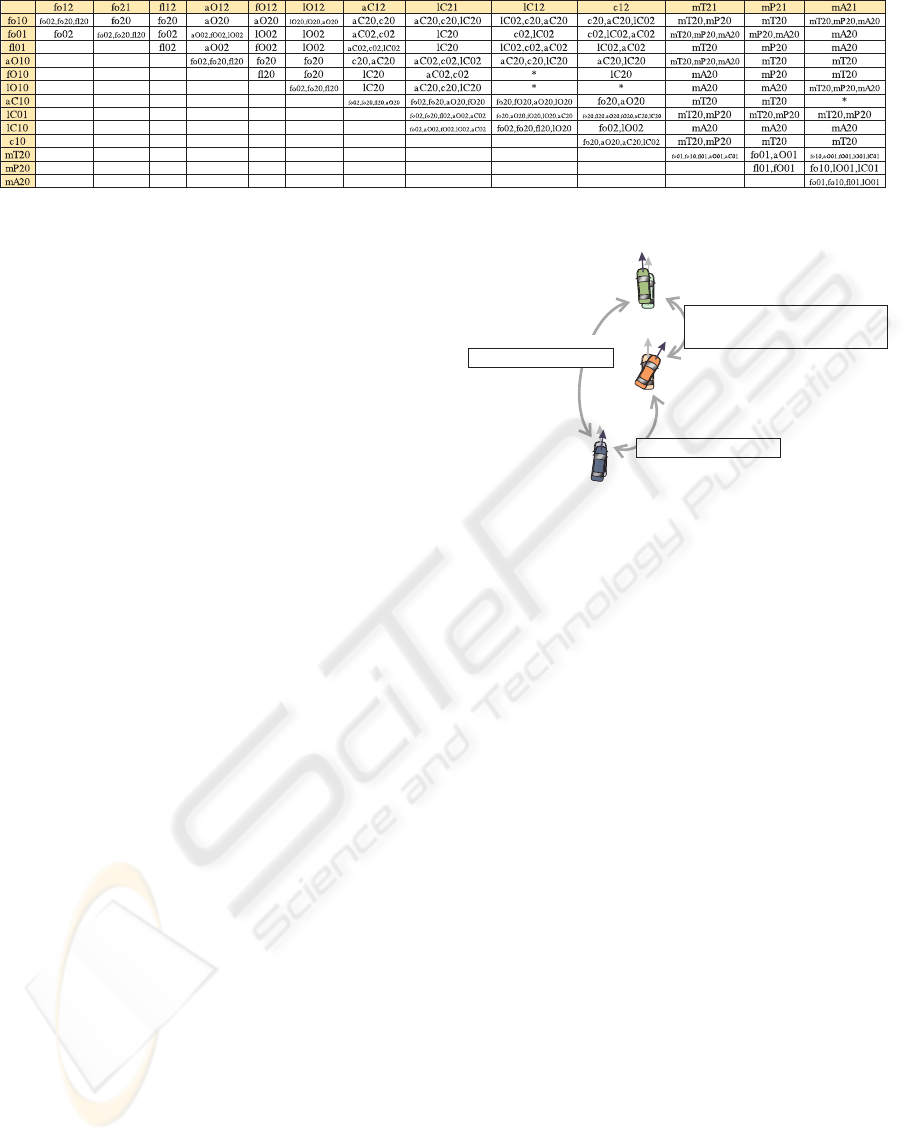
Figure 4: SC MLN formulae encoded in a matrix form. Abbreviations are depicted in Table 1.
from Alchemy was used for inference (Richardson
and Domingos, 2006).
5.1 Simulated Example
The following simulation exemplifies the need of a
global view on a traffic scene. A situation with three
cars O0, O1 and O2 is simulated. All three cars are
moving in the same direction, so that for every ob-
ject pair the object relation follow is valid. Mea-
surement uncertainty with respect to object orienta-
tion was added and the resulting scene is shown in
Figure 5. The corresponding abstracted conceptual
values of all modelled object attributes are depicted
in Figure 5 in brackets, while inferred results of OR
MLN and SCOR MLN are shown in boxes. Thereby
only the inferred object relations with highest proba-
bility are listed. Because of the simulated uncertainty
for O0, the conceptual values for the relative object
attribute difference in orientation result in Equal be-
tween O0 and O2 as well as between O1 and O2,
but Crossing between O0 and O1. A contradiction in
these measured attributes is easy to see, if we look
at the scene described by the object attributes as a
whole: if O2 has qualitative the same orientation as
O1 and O0 has crossing orientation to O1, then the
orientation between O0 and O2 should be crossing
too; or, if same orientation between O1 and O2 and
between O0 and O2 holds, then it should hold also
between O0 and O1. The OR MLN is not capable of
resolving this contradiction, since it infers the object
relations considering the object attributes only. The
SCOR MLN, however, takes the consistency of the
scene into account, which leads to a considerable in-
crease in the conditional probability for follow from
0.02 to 0.44.
5.2 Real Data
Video data from an on-board stereo camera platform
are processed with the algorithm described in (Bach-
mann and Dang, 2008) to automatically segment and
track object hypotheses. This method partitions the
image sequence into independently moving regions
O0
O1
O2
{Low,Crossing,NW/S },Close
{Low,Equal,NE/S },Close
{Low,Equal,NE/SW
}
,
Medium
follow(O1,O0)
leaveCrossing(O0,O1)
approachCrossing(O0,O1)
0,02
0,95
0,35
0,44
0,83
0,05
|
|
|
follow(O1,O2)
0,99 0,98
|
follow(O0,O2)
0,99 0,99
|
OR SCOR
OR SCOR
OR
SCOR
Figure 5: Simulated traffic scene example with correspond-
ing object attribute values and inference results of OR MLN
and SCOR MLN.
with similar 3-dimensional motion and relative dis-
tance. For every tracked segmented object hypothesis
we obtain a unique identifier. As long as a particu-
lar segmented hypothesis is being tracked, we get for
each frame a bounding box with its dimensions and
height above the estimated ground plane, the charac-
teristic 3D motion of the corresponding region and the
current position in space. These quantitative measure-
ment series are subsequently preprocessed and then
mapped onto conceptual values.
The series preprocessing step is done in batch
mode for a segmented image sequence. At first the
measurement series are smoothed. Afterwards ob-
ject speed magnitude and direction for every frame
are calculated from the corresponding 3D motion pro-
file. Further, relative distance, relative position and
difference of orientation are computed for each pos-
sible pair of moving objects in the frame. Thereby
we consider the ego-vehicle as a scene object, so that
pair relations between the segmented object hypothe-
ses and the ego-vehicle are also evaluated. The dif-
ference in orientation is determined by substracting
the speed direction angles of both objects. By com-
puting the relative position between a reference and a
primary object a reference system centered at the ref-
erence object is used. The reference axis is thereby
the axis in the direction of motion. We compute the
relative position relation exhaustively for every possi-
ble combination of reference and primary object. The
UNDERSTANDING OBJECT RELATIONS IN TRAFFIC SCENES
393
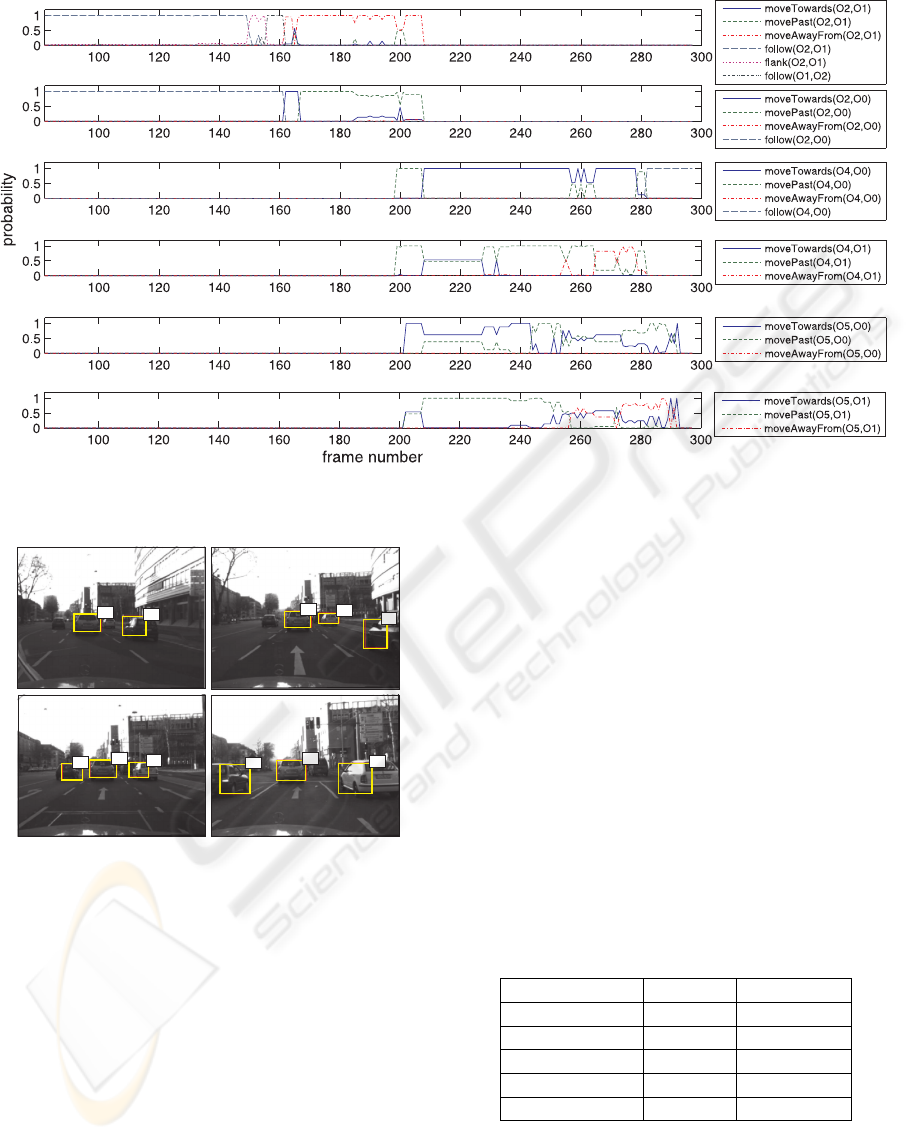
Figure 6: Inference results for selected groundings of the query predicates for all frames of the inner-city test sequence
obtained using SCOR MLN.
frame160 frame200
O1
O1
O2
O2
O4
frame240
O5
O1
O4
frame280
O1
O4
O5
Figure 7: Representative frames from the inner-city test se-
quence with segmented object hypotheses.
calculated quantitative values for all necessary object
attributes and relations are adjacently represented by
conceptual values and abstracted to ground logical
atoms. This abstraction step is carried out for each
frame of the sequence and thus we get as a result one
evidence file per frame. Inference is run for every
evidence file generated and so we get inferred proba-
bilities for each frame of the corresponding sequence.
Hence, one should consider the results obtained for
each frame as an individual experiment, which can
be assessed as being acceptable or not. Experiments
on automatically segmented traffic video sequences
are performed with both OR MLN and SCOR MLN.
Thereby query predicates are all modelled object rela-
tions. Exemplary results of SCOR MLN for an inner-
city video sequence are visualised and discussed in
the following. Figure 7 show several characteristic
image frames from the test sequence that reveal the
temporal traffic activities. Object IDs and bounding
boxes of the segmented objects in these images are
depicted too. In Figure 6 the results for all frames of
the test sequence are represented as graphs of inferred
probability versus image frame number for selected
groundings of the query predicates. It can be seen
that the inferred results comply to a great extend with
the sequence ground truth: First, the ego-vehicle O0
follows O1 and O2; then, O2 stops so that O1 and O2
drive by; while O2 disappears from camera sight after
some time, O4 and O5 appear standing still, waiting
at the traffic light; eventually O1 drives between O4
and O5; the ego-vehicle O0 follows O1 throughout
the sequence.
Table 2: AUC ROC results for OR MLN and SCOR MLN.
OR MLN SCOR MLN
follow 0,994051 0,997625
flank 0,574146 0,820281
moveTowards 0,929208 0,919756
movePast 0,900425 0,951633
moveAwayFrom 0,962180 0,978520
In order to gain a quantitative measure for the ac-
curacy of the inferred probabilities, our approach can
be considered as a classification task. Therefore, the
area under the receiver operating curve (AUC ROC)
is computed for each object relation seen as a differ-
ent class. Ground truth for the validity of the ob-
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
394

ject relations in every frame from the test sequence
is manually annotated. It should be noted that this
is an ambiguous task depending on the judgement of
the human observer. The AUC ROC results of OR
MLN and SCOR MLN for the test sequence visu-
alised in Figure 7 are listed in Table 2. Hereby the
inferred probabilities of 3384 groundings per mod-
elled object relation were evaluated. The SCOR MLN
achieved significantly improved results for most rela-
tions, supporting the claim for considering scene con-
text in complex relational classification tasks.
6 CONCLUSIONS
This contribution introduced an approach for inferring
a conceptual representation of relations between ob-
jects in traffic scenes using Markov logic. Soft defini-
tions for object relations in terms of discretised sen-
sor data were learned, as well as typical combinations
of such object relations. These learned models were
tested on automatically segmented traffic videos from
an on-board stereo camera platform. Taking into ac-
count both the soft definitions and typical scene con-
text, the conditional probability of several object rela-
tions given the learned model and evidence was com-
puted for each object pair in each frame of a test se-
quence. The results complied in most cases with the
judgement of a human observer. The proposed ap-
proach can be seen as a promising step towards bridg-
ing the gap between low-level image processing and
high-level situation interpretation. Future work con-
siders verifying the proposed approach on a broader
statistical base, augmenting the model with temporal
dependencies and closing the loop to low-level scene
segmentation.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge support of this
work by the Deutsche Forschungsgemeinschaft (Ger-
man Research Foundation) within the Transregional
Collaborative Research Centre 28 “Cognitive Auto-
mobiles”.
REFERENCES
Arens, M., Ottlik, A., and Nagel, H. H. (2004). Using be-
havioral knowledge for situated prediction of move-
ments. In KI, pages 141–155. Springer-Verlag.
Bachmann, A. and Dang, T. (2008). Improving motion-
based object detection by incorporating object-
specific knowledge. International Journal of Intel-
ligent Information and Database Systems (IJIIDS),
2(2):258–276.
Bachmann, A. and Lulcheva, I. (2009). Combining low-
level segmentation with relational classification. In
ICCV2009; IEEE Workshop on Visual Surveillance
(VS), pages 1216–1221.
Cohn, A. G., Hogg, D., Bennett, B., Devin, V., Galata, A.,
Magee, D., Needham, C., and Santos, P. (2006). Cog-
nitive vision: Integrating symbolic qualitative repre-
sentations with computer vision. In Christensen, H. I.
and Nagel, H. H., editors, Cognitive Vision Systems:
Sampling the Spectrum of Approaches, volume 3948
of LNCS, pages 221–246. Springer.
Fern
´
andez, C., Baiget, P., Roca, X., and Gonz
´
ılez, J.
(2008). Interpretation of complex situations in a
semantic-based surveillance framework. Image Com-
mun., 23(7):554–569.
Georis, B., Mazire, M., Br
´
emond, F., and Thonnat, M.
(2006). Evaluation and knowledge representation for-
malisms to improve video understanding. In Proceed-
ings of the International Conference on Computer Vi-
sion Systems (ICVS’06), New-York, NY, USA.
Gerber, R. and Nagel, H. H. (2008). Representation of oc-
currences for road vehicle traffic. Artif. Intell., 172(4-
5):351–391.
Hotz, L., Neumann, B., and Terzic, K. (2008). High-level
expectations for low-level image processing. In KI,
pages 87–94. Springer-Verlag.
Howarth, R. J. and Buxton, H. (2000). Conceptual descrip-
tions from monitoring and watching image sequences.
Image Vision Comput., 18(2):105–135.
Hummel, B., Thiemann, W., and Lulcheva, I. (2008). Scene
understanding of urban road intersections with de-
scription logic. In Cohn, A. G., Hogg, D. C., M
¨
oller,
R., and Neumann, B., editors, Logic and Probability
for Scene Interpretation, number 08091 in Dagstuhl
Seminar Proceedings, Dagstuhl, Germany.
Kok, S., Sumner, M., Richardson, M., Singla, P., Poon, H.,
Lowd, D., and Domingos, P. (2007). The Alchemy
system for statistical relational AI. Technical report,
Department of Computer Science and Engineering,
University of Washington, Seattle, WA.
Neumann, B. and M
¨
oller, R. (2008). On scene interpreta-
tion with description logics. Image Vision Comput.,
26(1):82–101.
Richardson, M. and Domingos, P. (2006). Markov logic
networks. Machine Learning, 62(1-2):107–136.
Tran, S. D. and Davis, L. S. (2008). Event modeling and
recognition using markov logic networks. In ECCV
’08: Proceedings of the 10th European Conference on
Computer Vision, pages 610–623, Berlin, Heidelberg.
Springer-Verlag.
Vernon, D. (2006). The space of cognitive vision. In Chris-
tensen, H. I. and Nagel, H. H., editors, Cognitive Vi-
sion Systems: Sampling the Spectrum of Approaches,
volume 3948 of LNCS, pages 7–26. Springer.
UNDERSTANDING OBJECT RELATIONS IN TRAFFIC SCENES
395
