
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR
SEGMENTING GESTURE-DEFINED SPATIAL RIGID MOTION
Loic Merckel and Toyoaki Nishida
Graduate School of Informatics, Kyoto University, Japan
Keywords:
Change-point detection, Lie group, Rigid body motion segmentation, Special Euclidean group, Exponential
map.
Abstract:
Common CAD interfaces for editing spatial motion of virtual objects, which includes both position and ori-
entation information, are often hampered by complexity and lack of intuitiveness. As the demand for motion
data is increasing, e.g., in computer graphics or mixed reality, the development of new interfaces that offer a
natural means of specifying arbitrary motion becomes essential. A solution consists in relying on live motion
capture systems to record user’s gestures through space. In this context, we present a novel method for dis-
covering change-points in a time series of elements in the set of rigid-body motion in space SE(3). The goal is
to segment gesture-defined motion with in mind the development of a method for enhancing the user’s intent.
Although numerous change-points detection techniques are available for dealing with scalar, or vector, time
series, the generalization of these techniques to more complex structures may require overcoming difficult
challenges. The group SE(3) does not satisfy closure under linear combination. Consequently, most of the
statistical properties, such as the mean, cannot be properly estimated in a straightforward manner. We present
a method that takes advantage of the Lie group structure of SE(3) to adapt a difference of means method.
Especially, we show that the change-points in SE(3) can be discovered in its Lie algebra se(3) that forms a
vector space. The performance of our method is evaluated through both synthetic and real data.
1 INTRODUCTION
The growing progress in capturing motions, includ-
ing both position and orientation data, has motivated
some initiatives (e.g., (Merckel and Nishida, 2009)) to
develop new interfaces, for generating hand-defined
motions, as an alternative to the conventional, and
overwhelming, WIMP-based interfaces (van Dam,
1997) of CAD software. An important application
is to provide a wide range of users with an effective
means of creating animated 3D contents for Mixed
Reality (MR) environments. In this vein, (Merckel
and Nishida, 2009) present a hand-held MR interface,
which consists of a tablet PC equipped with a six-
degree-of-freedom (6-DOF) orientation and position
sensor, for animating 3D virtual items. To do so, the
user naturally describes the 6-DOF trajectory in space
by moving the hand-held system as if it was the item.
Such a technique suffer from a two-fold draw-
back. First, the motion capture process is, to some ex-
tent, limited in precision and may contain noise. Sec-
ond, user’s inputs are hampered by what (Sezgin and
Davis, 2004) refer to as “imperfect motor control”,
i.e., the user’s movements (gestures) do not strictly
reflect what the user intends. Note that some mod-
ern motion capture systems has become fairly robust
and accurate, and consequently, the former problem
might be quasi-negligible compared with the latter
one (e.g., some quantitative results are presented by
(Fiorentino et al., 2003) concerning a 3D position op-
tical tracker). As a result, when motion is defined
via hand-simulating the movements in space, the user
may encounters some setbacks for expressing her/his
intention.
In a similar spirit, 2D and 3D input devices have
been extensively employed for drawing curves (e.g.,
see (Fiorentino et al., 2003) and references therein).
These attempts have to cope with the same issues. A
typical scheme, for addressing those flaws, consists in
splitting the input curve into primitives, and then, in-
ferring the user’s intent in order to enhance each seg-
ment ((Qin et al., 2001) and (Fiorentino et al., 2003)).
Those curves are a sequence of 2D or 3D points in Eu-
clidean space (R
2
or R
3
), which is a quite appealing
structure for performing a wide variety of data pro-
cessing algorithms.
284
Merckel L. and Nishida T. (2010).
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL RIGID MOTION.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 284-295
DOI: 10.5220/0002839702840295
Copyright
c
SciTePress

The long term goal of our research is to develop
an efficient means of amplifying the user’s intent dur-
ing freehand motion definition. Analogously to 3D
drawing engines (Fiorentino et al., 2003), the envis-
aged method consists in discovering some key-points
of the motion, then interpolating a smooth trajectory
between each consecutive key-points. The goal of the
current research is to address the former issue, i.e., to
discover key-points in motions. In contrast to planar
or spatial curves, a sensor-captured motion results in
a discrete time series of displacements, that formally,
amounts to a time series of elements in the special
Euclidean group of rigid body motion, commonly de-
noted SE(3). Although an universal definition of key-
points is hard to state, a reasonable assumption is to
identify key-points with change-points, sometimes re-
ferred to as “break-points” (Qin et al., 2001), in the
time series. The latter problem, i.e., the interpolation
of a smooth motion between key-points, is not dis-
cussed in this paper. Nevertheless, it is worth noting
that an adaptation of the method introduced by (Hofer
and Pottmann, 2004) should fulfill the requirement.
We formulate the problem as a change-points de-
tection problem in time series of elements in SE(3).
A major difficulty arises from the particular structure
of the group SE(3) that does not satisfy closure under
linear combination. Consequently, such a structure
sets some serious constraints that prevent numerous
of the common time series data processing or mining
techniques from being applicable. For example, most
of the statistical properties, such as the mean, can-
not be properly estimated in a straightforward man-
ner. However, by exploiting the Lie group structure
of SE(3), we show how to adapt a difference of means
method (“which is an adaptation of an image edge de-
tection technique”, (Agarwal et al., 2006)). In par-
ticular, we show that the change-points on the group
SE(3) can be discovered in its associated Lie algebra
se(3) that form a vector space. The method discussed
by (Agarwal et al., 2006) is suitable only for detect-
ing changes in step functions (i.e., piecewise constant
functions). Our adaptation is formulated in a way that
does not assume such a simple model, and should per-
form well with various piecewise-defined functions.
The contribution of the present work lies into two-
fold. First, a novel method for detecting change-
points in SE(3) is presented and evaluated. Second,
an underlying general approach, which can be easily
adapted to be applied to various Lie groups is sug-
gested.
The remainder of this paper is organized as follow.
In the next section, we discuss about the problematic
and related works.
In Section 3, we briefly present the Lie group the-
ory and we describe the structure of the group SE(3).
In Section 4 we introduce our method for detecting
change-points on SE(3). Then, in Section 5, we pro-
pose a set of evaluations using both synthetic and real
data. Finally, in Section 6, we summarize our key
points.
2 DISCUSSIONS AND RELATED
WORKS
The detection of change-points in time series, which
consists in partitioning the time series in homoge-
neous segments (in some sense), is an important issue
in several domains ((Basseville and Nikiforov, 1993),
(Ide and Inoue, 2005), (Agarwal et al., 2006)). Con-
sequently, numerous attempts at solving this prob-
lem exist ((Basseville and Nikiforov, 1993), (Moskv-
ina and Zhigljavsky, 2003), (Ide and Tsuda, 2007),
(Gombay, 2008) ,(Kawahara and Sugiyama, 2009)).
However, most of the existing techniques apply only
to scalar, or, for certain, vector time series. Fur-
thermore, as pointed out in the introduction section,
some of these methods are restricted to be performed
only with time series that follow simple models ((Bas-
seville and Nikiforov, 1993), (Agarwal et al., 2006)).
Therefore, these methods may not provide us with a
suitable solution to deal with time series of elements
in more elaborated structures.
The difference of means method (Agarwal et al.,
2006) is relying only on linear operators, and thus,
should be easily extended to vector spaces, such as
the set of real matrices (R
n×n
), in which the notions of
mean and distance exist. Still, considering a general
metric group structure, the difficulty remains as the
closure under linear operators may not hold. How-
ever, restricting our attention to metric Lie groups ex-
tends the possibilities. One of the great particular-
ity of this class of groups is the local approximation
of their structure by the tangent space, which, at the
identity, is a Lie algebra forming a vector space. Maps
from the group to its algebra, and inversely, exist in a
neighborhood of the identity, and are referred to as the
logarithmic and the exponential maps (respectively).
This particular nature of Lie groups provide a means
of extending certain methods relying on linear opera-
tions to non-linear groups.
For example, (Lee and Shin, 2002) extend the con-
cept of Linear Time-Invariant (LTI) filters to orienta-
tion data (e.g., quaternion group). The same approach
is used in the work of (Courty, 2008) to define a bi-
lateral motion filter. (Tuzel et al., 2005) propose an
adaptation of the mean shift clustering technique to
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL
RIGID MOTION
285

Lie groups. This method has been extended by (Sub-
barao and Meer, 2006) to suit any analytic manifold.
(Fletcher et al., 2003) propose a counterpart of the
Principal Component Analysis (PCA) method on Lie
groups by defining the concept of principal geodesic
curves.
In this paper, we attempt to adapt the difference of
means method (Agarwal et al., 2006) to suit motion
data. Although that the focus is set on the Lie group of
spatial rigid motions, our method is quite generic and
can be adapted to numerous Lie groups, especially the
subgroups of the general linear group GL
n
(R).
In the literature, we found two different ap-
proaches to extend the concept of mean to a Lie group
(see, e.g., (Buss and Fillmore, 2001), (Srivastava and
Klassen, 2002), (Govindu, 2004), (Fletcher et al.,
2003)). Both of them are based on the observation
that the arithmetic mean in Euclidean spaces is the
solution to the equation
x = arg min
x
n−1
X
i=0
kx − x
i
k
2
. (1)
Similarly, the mean of a set of points {M
i
} in a metric
Lie group can be formulated as the point M that min-
imizes the sum of squared distances d(M, M
i
). Con-
sequently, the concept of mean relies on the choice
of the metric. The first approach, denoted the extrin-
sic mean, utilizes the induced metric of an Euclidean
space in which the group is embedded (details are
given by (Govindu, 2004), (Fletcher et al., 2003), and
references therein). The second approach, referred to
as the intrinsic mean, consists in choosing the Rie-
mannian distance on SE(3) (intrinsic distance). The
mean is then defined as follow:
M = arg min
M∈SE(3)
n−1
X
i=0
d
2
(M − M
i
). (2)
Employing this definition of the mean, the difference
of means method could be adapted. The drawback
is that, in practice, the computation of M by solving
directly the equation (2) is quite complex. Alterna-
tively, an iterative algorithm, based on the work of
(Buss and Fillmore, 2001), is proposed by (Fletcher
et al., 2003). However, this algorithm is still iterative,
and thus may required some significant computation
time (the iterative process have to be performed for
each point of the time series). Furthermore, such an
approach would require a piecewise constant-function
as a model for the data (as discussed earlier).
Our approach does not compute the mean, but re-
lies on the operation of a mean filter (LTI filter type).
The methodology introduced in this paper presents
some similarities with the work of (Lee and Shin,
2002). They suggest a general scheme for apply-
ing linear filters to any orientation representation that
form a Lie group structure (such as the quaternion
group or the rotation group SO(3)). We follow this
scheme for applying the mean filter (Note that the
adaptation of this scheme to the rigid motion group
is straightforward).
In practice, live motion is captured via particular
equipments. Many trackers give six or seven compo-
nents (depending on whether it is based on the Euler
angles or on Quaternion for parameterizing the rota-
tion). The mapping from the sensor raw data to SE(3),
or other structures trivially homeomorphic to SE(3),
such as R
3
×SO(3), is usually straightforward (and of-
ten employed for storing/recording the motion). One
could search for changes, a priori, in the generating
process of the series (i.e., during the data acquisi-
tion). However, such an approach would be hardware-
dependent and restricted to only on-line processing.
Consequently, existing data could not be treated. Our
approach is independent of the source of the data, and
can be performed on-line as well as off-line. It can be
remarked that purely optical methods for live motion
capture may directly output the time series on SE(3)
(Drummond and Cipolla, 2002).
Another conceivable approach consists in param-
eterizing the group, and search for changes in the pa-
rameters space (which can be regarded as bringing the
problem back to the approach suggested at the previ-
ous paragraph). For example, (Grassia, 1998) gives
a comprehensive description of several common pa-
rameterizations of the rotation group SO(3), which
could be employed to parametrize SE(3). Although it
is fairly intuitive that a change in the parameters space
would correspond to a change in the series, it is not
mathematically obvious (some rational and elements
of proof would be required for each parameteriza-
tion). A particular attention should be given to the pa-
rameterization scheme to avoid some anomalies that
may occur in the parameters space. For example, it
has been proven that “it is topologically impossible to
have a global 3-dimensional parameterization with-
out singular points for the rotation group” (Stuelp-
nagel, 1964) (e.g., the Euler angles suffer from the so
called gimbal lock). It can be noted here that the ex-
ponential map from the Lie algebra to the Lie group
is a sort of parameterization of the group, the param-
eters space being its Lie algebra (Grassia, 1998). In
this regards, our approach could fit into this category.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
286

3 THE LIE GROUP SE(3) AND
THE LIE ALGEBRA se(3)
3.1 General Overview of Lie Groups
3.1.1 Definitions
A Lie group G is a group that is also a differentiable
manifold on which the group operations (i.e., noting
· the binary operation of G, G × G 7→ G, (x,y) → x · y
and G 7→ G, x → x
−1
) are differentiable.
The tangent space of G at the identity has a struc-
ture of Lie algebra g, which is a vector space on which
the Lie bracket operator (bilinear, anti-symmetric and
satisfying the Jacobi identity) is defined.
The exponential map, denoted exp, is a map from
the algebra g to the group G (for a formal definition
and proof of existence, see (Huang, 2000)). In gen-
eral, the exponential map is neither surjective nor in-
jective. Nevertheless, it is a diffeomorphism between
a neighborhood of the identity I in G and a neighbor-
hood of the identity 0 in g. The inverse of the ex-
ponential map N
I
(G) 7→ g is denoted log (logarithmic
map).
3.1.2 Matrix Lie Groups
Matrix Lie groups are subgroups of the general lin-
ear group GL
n
(R), which is the group of invertible
matrices (the group operation being the multiplica-
tion). The Lie bracket operator is defined as [A, B] =
AB − BA and the exponential map by:
exp(V) =
∞
X
k=0
V
k
k!
. (3)
The inverse, i.e., the logarithmic map, is defined as
follow:
log(M) =
∞
X
k=1
(
−1
)
k−1
k
(
M − I
)
k
, (4)
which is well defined only in a neighborhood of the
identity (otherwise, the series may diverge).
Matrix Lie groups are Riemannian manifolds, i.e.,
they possess a Riemannian metric (derived from a col-
lection of inner products on the tangent spaces at ev-
ery point in the manifold). Let S be a matrix Lie
group. The metric d : S × S 7→ R
+
such that
d(A, B) =
log(A
−1
B)
F
, (5)
with
k
·
k
F
the Frobenius norm of matrices, is the length
of the shortest curve between A and B (this curve is
Figure 1: Sequence M
i
of point in SE(3) that physically
corresponds to a rigid body motion.
referred to as the geodesics, whereas its length is the
intrinsic distance).
3.2 The Special Euclidean Group SE(3)
Throughout this paper we consider the special Eu-
clidean group SE(3), which is the matrix Lie group
of spacial rigid body motions and is a subgroup of
GL
4
(R). A general matrix representation has the form
SE(3) =
(
R t
0 1
!
.
R ∈ SO(3), t ∈ R
3
)
. (6)
The rotation group SO(3) is defined as {R ∈
R
3×3
/ R
T
R
−1
= I
3
, det(R) = 1}. An element of SE(3)
physically represents a displacement, R corresponds
to the orientation, or attitude, of the rigid body while
t encodes the translation (Figure 1).
The Lie algebra se(3) of SE(3) is given by:
se(3) =
(
Ω v
0 0
!
.
Ω ∈ R
3×3
, Ω
T
= −Ω, v ∈ R
3
)
.
(7)
The skew-symmetric matrix Ω can be uniquely ex-
pressed as
Ω =
0 −ω
z
ω
y
ω
z
0 −ω
x
−ω
y
ω
x
0
, (8)
with ω = (ω
x
, ω
y
, ω
z
) ∈ R
3
such that ∀x ∈ R
3
, Ωx =
ωx. Physically, ω represents the angular velocity of
the rigid body, whereas v corresponds to the linear
velocity (Zefran et al., 1998).
(Selig, 2005) presents a closed-form expression of
the exponential map (i.e., (3)) and its local inverse
(i.e., (4)). The exponential map se(3) 7→ SE(3) is
given by:
exp(V) = I
4
+ V +
1 − cos(θ)
θ
2
V
2
+
θ − sin(θ)
θ
3
V
3
, (9)
where θ
2
= ω
2
x
+ ω
2
y
+ ω
2
z
. Note that it can be re-
garded as an extension of the well known Rodrigues’
formula for rotations (i.e., on the Lie group SO(3)).
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL
RIGID MOTION
287

Figure 2: When a change occurs in the time series,
|M
f
(X
i
) − X
i
| shows a local maximum.
The logarithmic map N
I
(SE(3)) 7→ se(3) is yielded
by:
log(M) = a
bI
4
− cM + dM
2
− eM
3
, (10)
with
a = (1/8) csc
3
(
θ/2
)
sec
(
θ/2
)
b = θ cos(2θ) − sin(θ)
c = θ cos(θ) + 2θ cos(2θ) − sin(θ) − sin(2θ)
d = 2θ cos(θ) + θ cos(2θ) − sin(θ) − sin(2θ)
e = θ cos(θ) − sin(θ)
and tr(M) = 2 + 2 cos(θ). This is valid only for −π <
θ < π.
4 PROPOSED METHOD FOR
DETECTING CHANGE-POINT
4.1 Overview of the Method
Let (X
0
, . . . , X
n−1
) be a time series. A simple, but
efficient and quite robust technique for discovering
the change-points is the difference of means method
(Agarwal et al., 2006), which is performed only by
means of linear operations. The principle is, for each
point X
i
, to calculate the mean of the N points after
X
i
(right mean), and to calculate the mean of the N
points before X
i
(left mean). The parameter N, the
window size, should be carefully selected as men-
tioned by (Agarwal et al., 2006). Then, the distance
d
i
between the right and left means of X
i
is compared
with the other distances yielded by the points in the
vicinity of X
i
. If d
i
is the greatest distance, then X
i
is declared as a potential change-point. Some heuris-
tics should be applied to conclude whether or not it is
effectively a true positive (see (Agarwal et al., 2006)
and below). This technique is hampered by the as-
sumption of a step function as a model for the data
(the points where the “steps” are present are then de-
tected).
In order to detect the change-points we adapt the
difference of means method. However, we formulate
it differently so as to make it suitable for more elab-
orated models (such as arbitrary piecewise-defined
functions). Let M
f
be the mean filter and N its mask
size. The response for the i
th
element is given by:
M
f
(X
i
) =
1
2N + 1
N
X
k=−N
X
i+k
. (11)
Our method is based on the observation that if a
change occurs at k
∗
, then |M
f
(X
k
∗
) − X
k
∗
| should be
a local maximum of the series (|M
f
(X
i
) − X
i
|)
i
(Fig-
ure 2).
To derive an analogue filter M
G
f
(G referring to the
group) of M
f
to be applied to time series in SE(3), we
follow the construction protocol introduced by (Lee
and Shin, 2002). The key idea is to interpret each
displacement log(M
−1
i
M
i+1
) between two consecutive
points M
i
and M
i+1
of a series in SE(3) as a linear
displacement V
i+1
− V
i
in the algebra se(3). The ob-
tained filter M
G
f
remains a “LTI type” filter in terms of
properties (the proof given by (Lee and Shin, 2002) is
employing a closed-form of the exponential map valid
for quaternions, however a proof using (9) is very sim-
ilar). A point X
k
is declared to be a potential change-
point if the distance |M
f
(X
k
) − X
k
| is the largest one
in a neighborhood of X
k
. Analogously, since there is
a one-to-one correspondence between a displacement
in se(3) and a displacement in SE(3) (Lee and Shin,
2002), M
k
is declared to be a potential change-point
if d(M
k
, M
G
f
(M
k
)) is a local maximum of the series
(d(M
i
, M
G
f
(M
i
)))
i
.
To summarize, the pipeline of the approach con-
sists in transforming the sequence in SE(3) to the
vector space se(3) via logarithmic mapping, perform-
ing the required linear operations (i.e., applying the
mean filter), and finally, interpreting the results back
to SE(3) (via exponentiation) for discovering the
change-points (Figure 3). In the remainder of this sec-
tion, we detail each step.
4.2 Transformation between SE(3) and
se(3)
Let (M
0
, . . . , M
n−1
) be a time series in SE(3). One can
remark that
∀i ∈ ~1, n − 1, M
i
= M
0
i−1
Y
j=0
M
−1
j
M
j+1
. (12)
The equality (12) shows that any element of the
time series can be regarded as a cumulation of
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
288

Figure 3: Conceptual view of the change-point detection on SE(3). As discussed in the text, in practice, if the Riemannian
metric is used, the set of ∆
i
= exp(δ
i
) does not need to be calculated.
Figure 4: The points M
−1
i
M
i+1
∈ SE(3) (assumed to be in
a neighborhood of I
4
) are mapped onto V
i+1
− V
i
∈ se(3) by
the logarithmic map. The inverse mapping can be achieved
by the exponential map.
small displacements M
−1
j
M
j+1
from the initial ele-
ment M
0
. Note that we assume these displacements
small enough so that
ϕ
j
= log
M
−1
j
M
j+1
(13)
exists. Equation (12) can then be written
∀i ∈ ~1, n − 1, M
i
= M
0
i−1
Y
j=0
exp
ϕ
j
. (14)
Similarly to the approach presented by (Lee and
Shin, 2002), we construct the following sequence
in se(3): given an initial condition V
0
, ∀i ∈ ~0, n −
2, V
i+1
= ϕ
i
+V
i
(Figure 4). We get the two following
relations for i ∈ ~1, n − 1:
M
i
= M
0
i−1
Y
j=0
exp
V
j+1
− V
j
, (15)
and
V
i
= V
0
+
i−1
X
j=0
log
M
−1
j
M
j+1
. (16)
4.3 Application of the Mean Filter
The filter M
G
f
is defined so that log(M
−1
i
M
G
f
(M
i
)) =
M
f
(V
i
) − V
i
, which can be written
M
G
f
(M
i
) = M
i
exp
1
2N + 1
N
X
k=−N
V
i+k
− V
i
. (17)
By following a similar development as in the work of
(Lee and Shin, 2002), we obtain:
M
G
f
(M
i
) = M
i
exp
ζ
R
(ϕ
i
) − ζ
L
(ϕ
i
)
, (18)
with
ζ
R
(ϕ
i
) =
N−1
X
k=0
N − k
2N + 1
ϕ
i+k
, (19)
and
ζ
L
(ϕ
i
) =
N−1
X
k=0
k + 1
2N + 1
ϕ
i−N+k
. (20)
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL
RIGID MOTION
289

The term ζ
R
(ϕ
i
) − ζ
L
(ϕ
i
) can thus be interpreted as
a difference of weighted means. Let this difference of
weighted means be denoted by
δ
i
= ζ
R
(ϕ
i
) − ζ
L
(ϕ
i
). (21)
4.4 Change-Point Detection
As previously discussed, the change-points should
correspond to local maximums of the series
(d(M
i
, M
G
f
(M
i
)))
i
. Considering the Riemannian dis-
tance, (18) leads to
d(M
i
, M
G
f
(M
i
)) =
log
M
−1
i
M
G
f
(M
i
)
F
=
ζ
R
(ϕ
i
) − ζ
L
(ϕ
i
)
F
=
k
δ
i
k
F
. (22)
Equality (22) shows that the value of M
G
f
(M
i
) does
not need to be explicitly computed. If kδ
i
k
F
is greater
than at any other points in the vicinity of M
i
, then M
i
is declared as potentially a change-point. Formally,
this can be expressed as: For a selected n ∈ N
∗
, e.g.,
n = N, if
k
δ
i
k
F
> max
j,i, j∈~i−n,i+n
n
kδ
j
k
F
o
, (23)
then M
i
is a candidate for a change-point. Such an ap-
proach yields a candidate every 2n points, therefore,
each candidate must be examined for avoiding false
positive. We can adapt the test suggested by (Agar-
wal et al., 2006). For example, given a candidate M
i
,
if kδ
i
k
F
> xkζ
L
(ϕ
i
)k
F
, x ∈]0, 1], then M
i
is declared to
be a valid change-point (the value x have to be empir-
ically selected).
5 RESULTS
In this section, we attempt to evaluate our method.
First, we assess the method based on simulation study.
Then, we conduct a set of experiments using real data
acquired via a motion capture device.
It follows from the previous section that one of
the important step of the detection process consists
in finding the local maxima of the function η : M
i
∈
SE(3) 7→
k
δ
i
k
F
∈ R
+
(or equivalently, i 7→
k
δ
i
k
F
). In
practice, a realistic scenario is that the motion is dis-
turbed by noise (e.g., due to motion capture device
imperfection), which consequently, affects the func-
tion η. In order to limit the potential detection er-
rors caused by this noise, we perform two different
smoothing filters. Those filters are intended to reduce
Figure 5: Data smoothing for enhancing the results (these
data are obtained from the original signal depicted in Fig-
ure 6). Plot of the function t 7→
k
δ
t
k
F
∈ R
+
without noise
(top), with strong Gaussian noise added to the original sig-
nal (middle), after smoothing both the motion and the func-
tion η itself (bottom).
Table 1: Definition of the noise level (NL). Both the po-
sition signal and the orientation signal (Figure 6) are dis-
turbed with a Gaussian noise of mean zero and standard de-
viation σ
T
and σ
R
, respectively.
0 1 2 3 4 5 6
σ
T
(cm) 0 0.5 1 1.5 2 2.5 3
σ
R
(
◦
) 0 2 2.5 5 10 20 40
the high frequency components of the data. There-
fore, the change-points should not be affected (as-
suming a Gaussian noise of mean zero, the response
of the mean filter M
f
should remain unchanged af-
ter attenuating the high frequency components due to
noise). Figure 5 illustrates the benefits of this two-
steps smoothing.
First, the motion data is smoothed using an adap-
tation of the orientation filter suggested by (Lee and
Shin, 2002). Although we have observed that this fil-
ter greatly enhances the motion by significantly re-
ducing additive noise, it is not removed.
Second, to avoid the detection of spurious max-
ima, we smooth the function η to attenuate the high
frequency components. This smoothing operation is
performed via the Savitzky-Golay filter. The choice
of this filter is motivated by its great property of pre-
serving important features of the signal such as the
extrema and the width of peaks.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
290
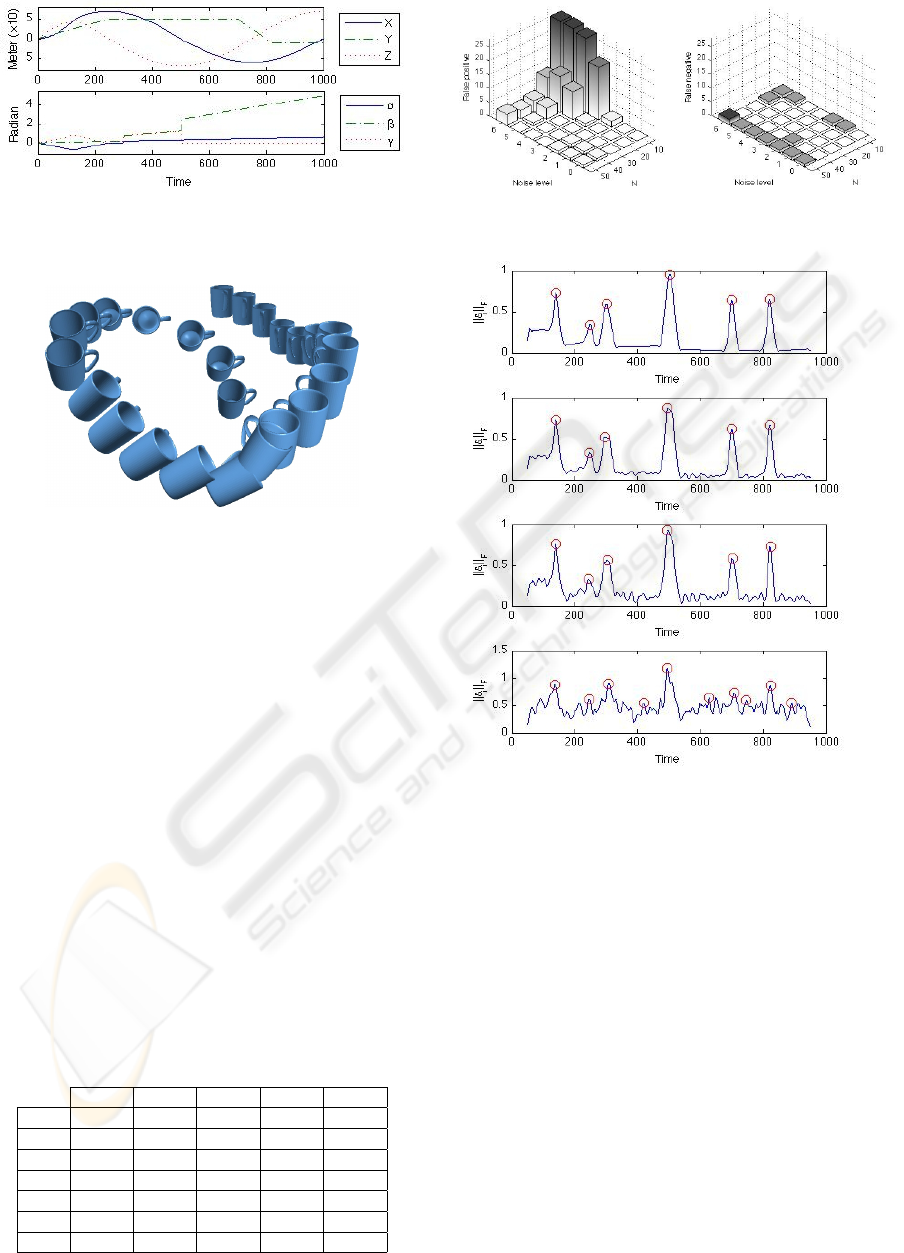
Figure 6: Original signal for generating the simulated mo-
tion. the top graph shows the positions, whereas the bottom
graph gives the orientation (by means of Euler angles).
Figure 7: A teacup displayed at each 40 pose of the motion
generated by the signal shown in Figure 6.
5.1 Synthetic Data
We generate a synthetic motion (M
1
, . . . , M
1000
). The
original signal is shown in Figure 6, and Figure 7 de-
picts a visual representation by means of a teacup. By
construction, there are a total of six change-points lo-
cated at index 140, 250, 300, 500, 700 and 820.
5.1.1 Effects of Noise Level and Windows Size
We study the effects of both, (i) the noise level, and
(ii) the choice of the window size N, on the change-
point detection results in terms of false positives and
false negatives. Table 1 gives our definition of seven
noise levels to which we refer to throughout the sim-
ulations (NL 0, . . . , NL 6). A change-point M
n
is
considered as discovered when the algorithm finds a
Table 2: Results of the change-points detection, depending
on the noise level and the window size, in terms of false
positive (FP) and false negative (FN). Each cell gives the
couple (FP, FN).
N = 10 N = 20 N = 30 N = 40 N = 50
NL 0 (0, 0) (0,0) (0, 0) (1, 0) (1, 1)
NL 1 (0, 1) (0, 0) (0, 0) (1, 0) (1, 1)
NL 2 (2, 1) (0, 0) (0, 0) (1, 1) (1, 1)
NL 3 (19, 0) (1, 0) (0,0) (0, 0) (0, 1)
NL 4 (27, 0) (10,0) (0, 0) (0, 0) (0, 1)
NL 5 (28, 1) (13,0) (4, 0) (1, 0) (0, 1)
NL 6 (28, 1) (10,1) (4, 0) (3, 0) (4, 2)
Figure 8: Visual representation of the results summarized
in Table 2.
Figure 9: Plot of the function t 7→
k
δ
t
k
F
for N = 30 and
(from top to bottom) noise level 0 , 1, 3, 6. The circles
correspond to the detected change-points.
point in its vicinity, i.e., M
n±k
, with k < 10. If sev-
eral points are in the vicinity, then only the nearest is
counted as valid (i.e., the other points are considered
as false positives).
Table 2 summarizes the results for 35 simulations
during which the window size N varies from 10 to 50
by step of 10, whereas the noise level increases from
level 0 to level 6. Figure 8 gives a visual representa-
tion of the same results.
We can observe that when the window size N is
reaching 50, a change-point is systematically missed,
independently of the noise level. This result is actu-
ally expected for the window size becomes larger than
the distance between two subsequent change-points.
Thus, only one will be discovered. At the other ex-
tremity, when N is small, the method is unstable, and
appears to be very sensitive to noise. Especially, a
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL
RIGID MOTION
291

Figure 10: A teacup displayed at each 10 pose of the motion. The noise level is set at (from left to right) 0, 1, 3 and 6. The
cups encapsulated in a frame correspond to the discovered change-points.
large number of false positives are yielded as soon as
the noise level reaches 3. Alternatively, a moderate
window size (e.g., between 30 and 40) provides good
results. When the noise level is high, we can observe
only few false positives.
Figure 9 shows the plots of the function t 7→
k
δ
t
k
F
for the window size set at 30 and the noise level set
at 0, 1, 3 and 6. Figure 10 gives the corresponding
representation of the motion (via a teacup) in which
the change-point are emphasized.
Globally, the simulation suggests that, assuming
an adequate selection of the window size, one can ex-
pect a low number of false positives and a very low, if
any, number of false negatives.
5.1.2 Comparison Against SST
Singular Spectrum Transform (SST) is a robust
change-point detection method based on the PCA
((Moskvina and Zhigljavsky, 2003), (Ide and Tsuda,
2007)). One of its great advantage compared with
various previous attempts is its capability to be ap-
plied to analyze “complex” data series (in terms of
“shape”) without restrictive assumptions about the
data model. For example, it can deal with data series
for which the distribution depends on the time, such as
arbitrary piecewise-defined functions (e.g., connected
affine segments).
Since SST is designed for manipulating only
scalar time series, to compare the results obtained by
the both SST and our proposed method, first, we ap-
ply the SST method to each of the six components
of the signal that served for generating our synthetic
motion (Figure 6), and second, we consolidate the re-
sults to determine the change-points. We use the soft-
ware written by the authors of the algorithm discussed
by (Moskvina and Zhigljavsky, 2003) (which is freely
distributed
1
). During the experiment we use the set-
ting suggested by the software.
Figure 11 presents the results. We can observe
that the performance, in terms of false positive and
false negative, of both our method and SST are com-
1
http://www.cardiff.ac.uk/maths/subsites/stats/change-
point
Figure 11: False positive and false negative yielded by the
SST method applied to the signal depicted in Figure 6.
Figure 12: 3D items animation engine.
parable (assuming a proper selection of the window
size N, see Table 2). Both methods yield a limited
number of false positives when the noise level reach a
certain level, with possibly a very few false negatives.
This results should be interpreted loosely, for the SST
algorithm requires an adequate setting of five parame-
ters. A better tuning of those parameters might lead to
improving the performances. However, we observed
that the setting suggested by the software usually pro-
vide good results.
5.2 Real Data
We have integrated our change-point detection
method into a 3D items animation engine, such as the
one described by (Merckel and Nishida, 2009), which
is an hand-held MR system (Figure 12). It consists of
a tablet PC equipped with a video camera and the IS-
1200 VisTarcker
2
(Foxlin and Naimark, 2003), which
is a 6-DOF (position and orientation) vision-inertial
tracker.
This engine is intended for providing experts of
2
Manufactured by InterSense, Inc., http://www.inter-
sense.com
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
292

Figure 13: Motion of the pointing-hand in the context of
a virtual instrument. The objective is to push sequentially
two different buttons located on the surface of the instru-
ment. The scene is shown from two different view-points.
Original user’s inputs (top). Interpolated motion between
change-points (bottom). The hands encapsulated in a frame
correspond to the discovered change-points.
Figure 14: Motion of the picking-hand in the context of a
virtual instrument. The objective is to express that the han-
dle of the front cover must be grasped and pulled. The scene
is shown from two different view-points. Original user’s in-
puts (top). Interpolated motion between change-points (bot-
tom). The hands encapsulated in a frame correspond to the
discovered change-points.
complex instruments with an efficient means of com-
municating knowledge, to end-users, about 3D tasks
that must be performed for properly operating the in-
struments. Especially, it allows to animate existing
3D items (CAD models) in the context of a subject
instrument (that can be a physically concrete instru-
ment, or alternatively, a virtual representation). For
animating an items, the user move the tablet PC in the
real-world as if it was the item. The motion is then
captured via the VisTracker. In other words, the en-
gine allows to acquire freehand motion.
Note that the motion is not directly given by the
sensor. As depicted in Figure 12, the motion is de-
Figure 15: Detected change-points in the pointing-hand mo-
tion. The 7 crosses are the ones found using our method,
while the 11 circles are the ones found using the SST
method.
Figure 16: Detected change-points in the pointing-hand mo-
tion. The 3 crosses are the ones found using our method,
while the 3 circles are the ones found using the SST method.
fined by the time sequence of poses R and T (i.e.,
the camera pose). These poses are also required for
registering the virtual objects (the item being animat-
ing and the virtual instrument) in the current scene.
The VisTarcker measures the coordinates (X, Y, Z)
T
and the orientation (yaw, pitch and roll) of the sen-
sor reference frame R
S
in the world reference frame
R
W
. The relative position T
cs
and orientation R
cs
of
the VisTracker (R
S
) and the video camera (R
C
) need
to be known to compute the camera pose. To deter-
mine this transformation, we perform an initial cal-
ibration process that consists in computing n poses
(R
i
, T
i
) from different viewpoints using a purely opti-
cal method (chessboard pattern recognition), simulta-
neously, recording the sensor data (R
s,i
, T
s,i
), and fi-
nally, finding the R
cs
and T
cs
that minimized the cost
function
P
n
i=1
(kR
i
− R
cs
R
s,i
k + kT
i
− (R
cs
T
s,i
+ T
cs
)k).
Figure 13 and 14 show the captured motion for
two different scenarios. In the first one (Figure 13),
the user is moving a pointing-hand model to sequen-
tially push two different buttons. In the second one
(Figure 14), the user is moving a picking-hand model
for expressing a situation in which the handle of a
cover has to be grasp and pulled. In both figures,
the top row depicts the original user’s input, while
the bottom row represents an enhanced version. We
can observed that the discovered change-points are
pertinent in the sense that, in both cases, the mo-
tion segmentation correspond to the user’s intent (the
buttons are pushed, and the handle is grasped and
pulled), and consequently, the motion is successfully
and greatly enhanced (e.g., the unintended “jerky”
movements are removed). The performed interpola-
tion here consists of a naive “screw-motion” joining
the change-points and ignoring the all other points
input by the user. To better represent the user’s in-
tention, a more elaborated method, such as the one
discussed by (Hofer and Pottmann, 2004), should be
considered.
For comparison, we have performed the SST
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL
RIGID MOTION
293

method to the 6 components of the motion signal
output by the VisTracker. In the first scenario, we
have discovered a total of 7 change-points using our
method, whereas the SST method has yielded 11
change-points. Figure 15 shows the relative distri-
butions of those two sets of points. One can ob-
served that the two results are, to a fairly large ex-
tent, well-correlated. Although the SST method has
discovered 4 points more than our method, the rela-
tive distributions (Figure 15) suggests that we could
“cluster” together the 11 points in a way that cor-
respond to the 7 points discovered by our approach.
Especially, regarding that the 11 points are an in-
terpolation through consolidation of the SST results
independently obtained from the 6 signals received
from the VisTracker. A change in one of the sig-
nal at time t, and a change in another signal at time
t + (with small), might have the same cause. Even
though, two change-points may be discovered. Our
method searches for changes in a particular mixture
of the 6 signals (that leads to a series in SE(3)), which
may yield a single change at, e.g., t + /2. This phe-
nomenon is unlikely to occur in the synthetic data, for
the cause leading to a change is, by construction, well
synchronized between the signals. Moreover, the ar-
tificial noise follows a neat Gaussian distribution (in
practice, the stochastic imperfection of the real data
due to various causes is unlikely to follow a perfect
Gaussian law).
Considering the second scenario, Figure 16 shows
that the both methods give comparable results. Only
a slight shift in the change-point positions can be ob-
served between the two approaches.
6 CONCLUSIONS
We have proposed a method for detecting change-
points in rigid-body motion time series. This method
can be regarded as an adaptation of the difference of
means method to time series in SE(3). It is based on
the key observation that the absolute gain of the mean
filter yields a local maximum when a change occurs.
By exploiting this result and the particular Lie group
structure of SE(3), we have shown that the change-
points in SE(3) can be discovered in its Lie algebra
se(3) through the following process: The initial time
series in SE(3) is transformed in a corresponding time
series in se(3) (via logarithmic mapping). Then for
each point in the vector space se(3), we calculate the
norm of the difference between a weighted mean of
the point to the left and a weighted mean of the point
to the right. Finally, the potential change-points cor-
respond to the maximum values.
A set of evaluations has been conducted showing
that, assuming an adequate parameter setting (mainly
the window size of the mean filter), the method should
yield a low number of false positives and a very low,
if any, number of false negatives.
REFERENCES
Agarwal, M., Gupta, M., Mann, V., Sachindran, N., Aner-
ousis, N., and Mummert, L. (2006). Problem de-
termination in enterprise middleware systems using
change point correlation of time series data. In
2006 IEEE/IFIP Network Operations and Manage-
ment Symposium NOMS 2006, pages 471–482. IEEE.
Basseville, M. and Nikiforov, I. V. (1993). Detection of
Abrupt Changes - Theory and Application. Prentice-
Hall, Inc, Englewood Cliffs, N.J.
Buss, S. R. and Fillmore, J. P. (2001). Spherical averages
and applications to spherical splines and interpolation.
ACM Trans. Graph., 20(2):95–126.
Courty, N. (2008). Bilateral human motion filtering. In the
16th European Signal Processing Conference, Lau-
sanne, Switzerland.
Drummond, T. and Cipolla, R. (2002). Real-time visual
tracking of complex structures. IEEE Transactions on
PAMI, 24:932–946.
Fiorentino, M., Monno, G., Renzulli, P. A., and Uva,
A. E. (2003). 3D sketch stroke segmentation and fit-
ting in virtual reality. In International conference on
the Computer Graphics and Vision, pages 188–191,
Moscow, Russia.
Fletcher, P. T., Lu, C., and Joshi, S. (2003). Statistics of
shape via principal geodesic analysis on lie groups.
In IEEE Conference on Computer Vision and Pattern
Recognition, pages 95–101. IEEE Comput. Soc.
Foxlin, E. and Naimark, L. (2003). Vis-tracker: A wear-
able vision-inertial self-tracker. Virtual Reality Con-
ference, IEEE, 0:199.
Gombay, E. (2008). Change detection in autoregressive
time series. Journal of Multivariate Analysis, 99:451–
464.
Govindu, V. M. (2004). Lie-algebraic averaging for globally
consistent motion estimation. In IEEE Conference on
Computer Vision and Pattern Recognition, pages 684–
691. IEEE Comput. Soc.
Grassia, F. S. (1998). Practical parameterization of rotations
using the exponential map. journal of graphics, gpu,
and game tools, 3(3):29–48.
Hofer, M. and Pottmann, H. (2004). Energy-minimizing
splines in manifolds. ACM Transactions on Graphics,
23(3):284–293.
Huang, J.-S. (2000). Introduction to Lie Groups, chapter 7,
pages 71–89. World Scientific Publishing Company.
Ide, T. and Inoue, K. (2005). Knowledge discovery from
heterogeneous dynamic systems using change-point
correlations. In SIAM International Conference on
Data Mining, pages 571–576.
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
294

Ide, T. and Tsuda, K. (2007). Change-point detection us-
ing krylov subspace learning. In SIAM International
Conference on Data Mining, pages 515–520.
Kawahara, Y. and Sugiyama, M. (2009). Change-point de-
tection in time-series data by direct density-ratio es-
timation. In SIAM International Conference on Data
Mining.
Lee, J. and Shin, Y. S. (2002). General construction of time-
domain filters for orientation data. IEEE Transactions
on Visualization and Computer Graphics, 8:119–128.
Merckel, L. and Nishida, T. (2009). Towards expressing
situated knowledge for complex instruments by 3D
items creation and animation. In The 8th International
Workshop on Social Intelligence Design, pages 301–
315, Kyoto, Japan.
Moskvina, V. and Zhigljavsky, A. (2003). An algorithm
based on singular spectrum analysis for change-point
detection. Communications in Statistics: Simulation
and Computation, 32:319–352.
Qin, S.-F., Wright, D. K., and Jordanov, I. N. (2001). On-
line segmentation of freehand sketches by knowledge-
based nonlinear thresholding operations. Pattern
Recognition, 34:1885–1893.
Selig, J. M. (2005). Lie Algebra, chapter 4, pages 51–
83. Monographs in Computer Science. Springer New
York, New York.
Sezgin, T. M. and Davis, R. (2004). Scale-space based fea-
ture point detection for digital ink. In Making pen-
based interaction intelligent and natural, AAAI fall
symposium.
Srivastava, A. and Klassen, E. (2002). Monte Carlo extrin-
sic estimators of manifold-valued parameters. IEEE
Transactions on Signal Processing, 50(2):299–308.
Stuelpnagel, J. (1964). On the parametrization of the three-
dimensional rotation group. SIAM Review, 6:422–
430.
Subbarao, R. and Meer, P. (2006). Nonlinear mean shift
for clustering over analytic manifolds. In Computer
Vision and Pattern Recognition, pages 1168–1175.
IEEE.
Tuzel, O., Subbarao, R., and Meer, P. (2005). Simultaneous
multiple 3d motion estimation via mode finding on lie
groups. In Tenth IEEE International Conference on
Computer Vision, pages 18–25. IEEE.
van Dam, A. (1997). Post-wimp user interfaces. Communi-
cations of the ACM, 40(2):63–67.
Zefran, M., Kumar, V., and Croke, C. (1998). On the gen-
eration of smooth three-dimensional rigid body mo-
tions. IEEE Transactions on Robotics and Automa-
tion, 14:576–589.
CHANGE-POINT DETECTION ON THE LIE GROUP SE(3) FOR SEGMENTING GESTURE-DEFINED SPATIAL
RIGID MOTION
295
