
A PRACTICAL APPROACH FOR APPLYING NON-LINEAR
DYNAMICS TO PARTICLE SYSTEMS
Athanasios Vogiannou, Michael G. Strintzis
Electrical & Computer Engineering Department, Aristotle University of Thessaloniki, Greece
Konstantinos Moustakas, Dimitrios Tzovaras
Informatics & Telematics Institute, Center for Research and Technology Hellas, Greece
Keywords:
Physically based modeling, Particle systems.
Abstract:
In this paper we present a new method for approximating non-linear dynamics in deformable simulations based
on a full cubic polynomial formulation of the inter-particle force. The proposed approach is a non-physical
extension of the well known St Venant Kirchhoff force, focusing on practical considerations about the behavior
of the deformable model. Therefore it is very useful for simulating and controlling non-linear stretching and
compressing properties of deformable models in applications where the computation time comprises a major
constraint. The presented force model can be easily implemented by the widely used particle systems and can
be parameterized based on a direct relation to spring models. We show that the non linear stretching behavior
of the proposed model is required for simulations where the external forces which interact with the models are
large in scale, while the performance of the presented method is comparable to simple mass-spring systems.
1 INTRODUCTION
The simulation of deformable objects has become a
significant component of computer graphics applica-
tions for increasing the level of realism and believ-
ability of the visual outcome since textiles and elastic
objects are a major component of real environments.
An important requirement of modern simulations is
the ability to efficiently respond to different scales of
external forces and constraints while both the stabil-
ity of the system and the level of realism remain un-
affected (Choi and Ko, 2005; Nealen et al., 2006).
Especially in the case that strong forces are ap-
plied to the deformed objects, the material should be-
have realistically and resist further stretching with-
out collapsing. Linear spring models cannot han-
dle this kind of situations, since they allow over-
elongation and generally behave realistically only for
small deformations (Etzmuss et al., 2003). One solu-
tion would be to use springs with high stiffness val-
ues. However, this is aggravating for numerical sta-
bility and leads to less flexible materials which do not
always result to the desired simulation outcome.
The physically “correct” solution to this prob-
lem would be to employ non-linear continuum mod-
els (Picinbono et al., 2003; Barbi
ˇ
c and James,
2005). These models can effectively simulate materi-
als which are able to handle large deformations at the
stretch, strain and/or bend direction. However, these
models are implemented under the scheme of sophis-
ticated finite element formulations. Even though fi-
nite element methods have been well established in
the computer graphics literature, they are not yet as
fast as particle systems and usually pose a significant
degree of implementation difficulty to non experts in
the field. Furthermore, they give little intuition about
the direct control over the behavior of the modeled
object, making them less appealing to animation in-
terfaces (Nealen et al., 2006).
As a consequence, the necessity of employ-
ing non-linear models with simpler implementation
schemes, such as particle systems, has recently re-
ceived the attention of researchers (Delingette, 2008;
Volino et al., 2009; Kikuuwe et al., 2009). These
methods employ continuum formulations of hyper-
elastic materials, namely the St Venant Kirchhoff ma-
terials, in order to provide realistic high performance
simulations of deformable solids or cloths.
Our work is largely motivated by this recent direc-
tion on the field, although we focus more on practi-
46
Vogiannou A., G. Strintzis M., Moustakas K. and Tzovaras D. (2010).
A PRACTICAL APPROACH FOR APPLYING NON-LINEAR DYNAMICS TO PARTICLE SYSTEMS.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 46-53
DOI: 10.5220/0002844700460053
Copyright
c
SciTePress

cal considerations about the behavior of the deformed
model and deliberately ignore complex physical for-
mulations for the sake of simplicity and performance.
In particular, the proposed method is based on a
full cubic polynomial formulation of the inter-particle
force of discrete particle systems. This type of force
proves to be very useful in simulations where the ex-
ternal forces take relatively high values and therefore
non-linear stretching and compressing properties are
necessary to ensure stability and realism, both in cloth
and deformable solids simulations. We also present a
constraint based parameterization of the force which
provides a direct relation to spring models and al-
lows adjustment of the model behavior according to
practical considerations, such as the level of allowed
stretching or compression.
The paper is organized as follows: Section 2
briefly discusses part of the work in the field focusing
on particle systems and methods that connect contin-
uum models to particle systems. Section 3 describes
thoroughly the proposed method while section 4 gives
the final details of integrating the proposed model to
particle systems. The results are presented in section
5 and the final conclusions are drawn in section 6.
2 RELATED WORK
Since the pioneering work of Terzopoulos (Terzopou-
los et al., 1987), deformable object modeling has re-
ceived significant attention from the computer graph-
ics community and various methods from the theory
of classical mechanics have been introduced under the
scope of graphics applications (Nealen et al., 2006;
Moore and Molloy, 2007). These methods are imple-
mented either as particle systems (Breen et al., 1994;
Baraff and Witkin, 1998; Choi and Ko, 2002; Golden-
thal et al., 2007; Selle et al., 2008; Selle et al., 2009)
or as finite elements (FE) that are based on continuum
formulations (Irving et al., 2004; Barbi
ˇ
c and James,
2005; Duriez et al., 2006; Irving et al., 2007). In gen-
eral, FE methods are more accurate and robust while
particle systems are simpler to implement and usually
faster. Therefore, there is a strong effort in the field
for combining the sophisticated properties of contin-
uum dynamics that FE methods facilitate with the
computational performance of particle systems (Etz-
muss et al., 2003; Lloyd et al., 2007).
More recently, methods for applying non lin-
ear dynamics to particle systems have been pre-
sented (Delingette, 2008; Volino et al., 2009; Kiku-
uwe et al., 2009). In particular, these methods do not
perform any linearization on the Green-Lagrange ten-
sor in the continuum model by employing St Venant
Kirchhoff (StVK) materials. Thus, they can intrin-
sically describe non-linear properties of deformable
models. In order to apply these properties along with
particle systems they proposed quite different tech-
niques. (Delingette, 2008) introduced the concept
of angular biquadratic springs for simulating mem-
branes, i.e. elastic 2D manifolds. (Volino et al., 2009)
calculate the inter-particle forces for cloths directly
from the triangle structure of the cloth manifold, in-
stead of the edge-wise approach. (Kikuuwe et al.,
2009) derived formulations that describe the inter-
particle forces on the edges of a regular tetrahedral
based volume by introducing the term of tetrahedron-
sharing edge pairs.
We also exploit the same approach to provide a
simple yet effective method for simulating and con-
trolling non-linear stretching properties of deformable
models with particle systems. In particular, we
present a network of non-linear springs, similar to
the one of (Kikuuwe et al., 2009), by introducing a
full cubic polynomial force which is formulated and
parameterized directly from practical considerations
about the model behavior. Our work can be con-
sidered as an intuitive perspective to non-linear dy-
namics that can be used directly by existing particle
systems to simulate robust and adjustable deformable
models at high performance rates.
3 PROPOSED METHOD
Non linear springs have been previously used in parti-
cle systems (Breen et al., 1994) and generally they are
reported as the natural outcome of describing forces
from non-linear strain tensors, such as the Green-
Lagrange tensor (Delingette, 2008; Kikuuwe et al.,
2009; Volino et al., 2009). In the 1D case, the force
f
i, j
between the particles p
i
and p
j
that corresponds
to this type of material is given by
f
i, j
=
K
2L
2
∆x
i, j
3
−
K
2
∆x
i, j
(1)
where ∆x
i, j
denotes the 1D distance between the par-
ticles, L is the rest length, where the force is zero, and
K is the stiffness constant.
The above equation is a cubic polynomial de-
scribing the 1D force of StVK materials (Barbi
ˇ
c and
James, 2005; Delingette, 2008; Kikuuwe et al., 2009;
Volino et al., 2009). The extension to 2D manifolds
and 3D solids is quite complex since the continuum
structure of the materials will introduce more terms
in the above force. In particular, the additional terms
correspond to the tetrahedron-sharing edge pairs and
are reported to be the major difficulty for extending
A PRACTICAL APPROACH FOR APPLYING NON-LINEAR DYNAMICS TO PARTICLE SYSTEMS
47

non linear 1D forces to higher dimensions (Kikuuwe
et al., 2009).
Even so, we can ignore any additional terms that
are induced by the continuum structure of higher di-
mensions and apply this force directly to 3D. Essen-
tially, we employ a physically based formulation only
for the behavior of the inter-particle distance |∆x
i, j
|,
which is a 1D problem (Etzmuss et al., 2003). A par-
ticle system (or spring network) with this type of non-
linear springs has been described by (Kikuuwe et al.,
2009) as a sub-outcome of their work. The authors re-
ported that although this model does not seem to have
any physical validity, it produces similar results to the
full non-linear model while it is significantly faster.
To our knowledge, this discrete formulation is prob-
ably the most efficient, in terms of performance and
realism, non-linear mass spring system for deformed
solids in the literature.
In practice, however, there are some concerns
about the StVK force. Firstly it does not resist to
compression as does with stretching, e.g. the mate-
rial is softer under compression, while, in the case
of deformable solids, there is still the possibility of
completely collapsing (Irving et al., 2004). This is a
main limitation that made StVK generally less appeal-
ing to solid modeling. However, the recent work of
(Kikuuwe et al., 2009) showed very promising results
for large deformations of arbitrary rotation and the
proposed method can been seen as an improvement
to this approach regarding the compression problem.
Secondly these models are not reported to be eas-
ily adjusted to external requirements, e.g. 3D mod-
eling adjustments by artists or forces applied from
inside the 3D world of the simulation, and focus
mainly on accuracy (Volino et al., 2009; Delingette,
2008) or real time interaction with the deformed ob-
jects (Barbi
ˇ
c and James, 2005; Volino et al., 2009).
Both drawbacks relate to the simple fact that the
StVK force is a cubic polynomial with only two
terms. A solution previously applied to this problem
was the use of a linear - Neo Hookean biphasic spring
force model (Irving et al., 2004). Although this ap-
proach solves the compression issue efficiently, the
pitfall is that biphasic forces need special treatment
for calculating derivatives (needed for the Jacobian)
and generally their parameterization is more complex
since two different forces are combined. In this work,
we present a more intuitive approach to solve these
issues utilizing a full cubic force on a discrete particle
system and a constraint based approach for calculat-
ing the parameters of this force. The presented force
has continuous derivatives, is simple to integrate and
parameterize and facilitates useful non-linear defor-
mation properties.
3.1 Full Cubic Force
In the rest of the text, the term force refers to the vec-
tor entity while force magnitude refers to the signed
magnitude of the force. Let the 3D vector x
i
denote
the position of the particle p
i
and again ∆x
i, j
= x
i
−x
j
.
Considering the force magnitude as a full cubic poly-
nomial, we can extend such expression to 3D as
f
i, j
=
a|∆x
i, j
|
3
+ b|∆x
i, j
|
2
+ c|∆x
i, j
| + d
∆x
i, j
|∆x
i, j
|
(2)
The parameters a, b, c and d that define the force,
and consequently the behavior of the cloth, do not
have a direct physical interpretation. In the following
section, however, we will describe a method to relate
these parameters to spring models.
The respective force derivative is given by
∂f
i
∂x
j
= I
a|∆x
i, j
|
2
+ b|∆x
i, j
| + c+
d
|∆x
i, j
|
+
∆x
i, j
∆x
i, j
T
2a+
b
|∆x
i, j
|
−
d
|∆x
i, j
|
3
(3)
where I denotes the 3x3 identity matrix.
3.2 Constraint based Force
Parameterization
The major problem with the intuitive step that we took
by employing a full cubic force is the calculation of
the respective parameters. In general, a set of param-
eters can de defined using a corresponding system of
equations. Based on this, we can define four con-
straints on the force magnitude so that the particles
will resist to deformation.
Let g(|∆x|) denote the force magnitude as a func-
tion of the distance |∆x| between two particles, i.e.
f
i, j
= g(|∆x|)
∆x
|∆x|
where particle indexes are omitted for brevity.
The first constraint should “enforce” the rest
length L of the particles by setting the force equal to
zero, i.e.
g(L) = 0 (4)
The other constraints should be related to the stiff-
ness induced by the non-linear force. In the case of
simple spring forces, the stiffness constant K defines
the ratio that the force magnitude changes according
to the deformation, i.e. the slope of the force magni-
tude - deformation curve. Thus, we can define a force
magnitude such that the stiffness increases with the
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
48

distance between the particle in order to resist further
elongation.
Figure 1 displays the concept. The spring force
has constant stiffness and even though this property
is good for numerical stability and performance, it
does not describe textiles well enough. The StVK
materials resist to stretching much better than simple
springs but are softer under compression. The pro-
posed approach aims at approximating the expected
deformable behavior where the internal forces resist
increasingly both to stretch and compression.
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2
−2
−1
0
1
2
3
4
5
Spring
St Venant Kirchhoff
Full Cubic
Figure 1: The stiffness ratio expressed as the derivative of
the force magnitude for the spring, St Venant Kirchhoff and
the proposed (full cubic force) model. The rest length is set
to L = 1 and the spring constant to K = 1. The stiffness of
the cubic force increases with the particle distance, signifi-
cantly resisting to compression and stretching compared to
the other two methods.
Based on a given spring model, we can set one
stiffness constant for the rest length and the other two
for percentages a
1
and a
2
of the rest length
g
′
(L) = K (5)
g
′
(a
1
L) = K
1
(6)
g
′
(a
2
L) = K
2
(7)
where K, K
1
and K
2
are the desired constant stiff-
ness values for different deformations rates and g
′
de-
notes the derivative of g. For example, a considerably
rational choice would be to set K
1
> K and K
2
> K
for a
1
= 1.1 and a
2
= 0.9 since, in most applications,
stretching above 10% should be avoided. In all the
parameters can be calculated by solving the follow-
ing linear system
L
3
L
2
L 1
3L
2
2L 1 0
3(a
1
L)
2
2a
1
L 1 0
3(a
2
L)
2
2a
2
L 1 0
a
b
c
d
=
0
K
K
1
K
2
(8)
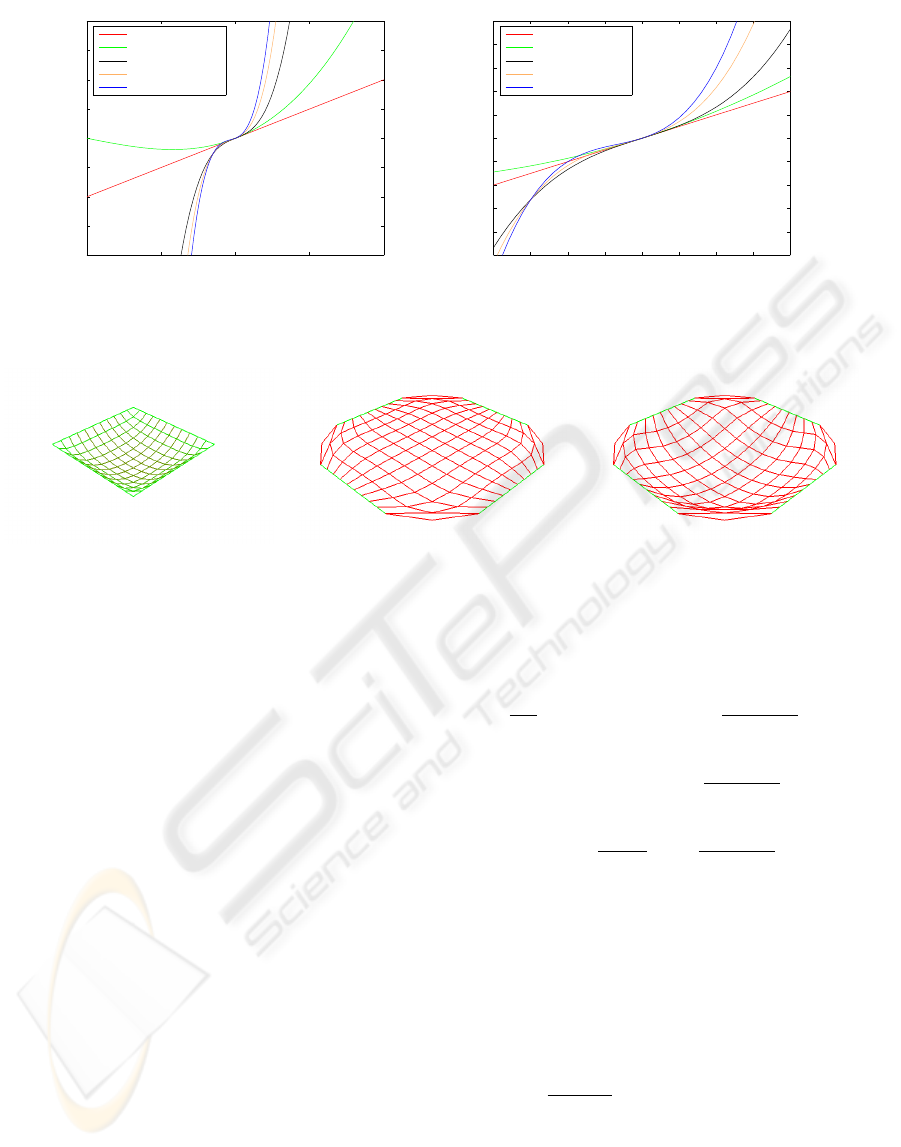
Figure 2 displays the magnitude of the proposed
force for different values of K
1
. In the case of stretch-
ing (i.e. |∆x| > 1) the proposed model behaves similar
to the StVK force. This is something expected since
the StVK force magnitude can be considered as a spe-
cial case of the proposed force with b = d = 0. How-
ever, in the case of compression the proposed force
increases its stiffness, compared to the StVK force
which after a certain value completely collapses. Note
also that for low deformation rates (i.e. |∆x| ≈ 1) the
full cubic force behaves similar to the linear spring
force. That is a desired feature since we usually want
to allow small deformations and resist only to large
ones.
In the case of clothes, the expected stretching
behavior is practically identical to the StVK force
model, as it had been shown by experimental re-
sults (Volino et al., 2009; Wu et al., 2003). Since the
proposed model is a good approximation of the StVK
force, it can describe sufficiently enough the stretch-
ing properties of cloths.
The constraints 4, 5, 6 and 7 provide a connection
between the parameters of the proposed force model
and spring forces. Using for reference a set of spring
parameters K and L, we can adjust the parameters a
1
,
a
2
, K
1
and K
2
in order to achieve the desired results,
according to practical considerations in cloth simula-
tions. In other words, the introduction of a constraint
based force parameterization provides direct manipu-
lation over the behavior of the object.
For example, models that behave like cloths have
been previously noted that should not exceed 10%
(Provot, 1995) in order to look realistic. This feature
is explicitly described by the force constraints of the
proposed method making it more suitable for adjust-
ing cloth parameters by someone with none in-depth
knowledge of mechanics, like a 3D artist. By increas-
ing or decreasing the desired deformation percentage
results in softer or stiffer materials that are, generally,
not textiles.
4 TIME INTEGRATION
Equations 2 and 3 can be applied directly to any dis-
crete model governed by the Newton’s second law of
motion f = ma. The proposed force model is em-
ployed under an implicit integration scheme as de-
scribed in (Baraff and Witkin, 1998). The implicit
solver is necessary for our approach as non-linear
forces generally result in stiffer equations and require
more stable solvers than simple linear forces. The
scheme is implemented using full evaluation of the
Jacobian (Volino et al., 2009). In our test, two itera-
A PRACTICAL APPROACH FOR APPLYING NON-LINEAR DYNAMICS TO PARTICLE SYSTEMS
49
0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
|Dx|
|F|
Spring
St Venant Kirchhoff
Full Cubic K1=2K
Full Cubic K1=4K
Full Cubic K1=6K
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
|Dx|
|F|
Spring
St Venant Kirchhoff
Full Cubic K1=2K
Full Cubic K1=4K
Full Cubic K1=6K
Figure 2: Comparison of the force magnitude between spring, St. Venant Kirchhoff and the proposed (full cubic force) model.
Global view (left) and zoom (right). The rest length is L = 1 and the spring constant is K = 1. The constraint parameters for
calculating the cubic force are set to a
1
= 1.1, a
2
= 0.9, K
2
= 2K and K
1
varies for each curve (K
1
= 2K for black, K
1
= 4K
for orange and K
1
= 6K for blue). The proposed model can increase the resisting force at higher rates than the other models.
Figure 3: Removing out-of-plane oscillations. A low resolution lattice of particles, shown at the state resting under its
own weight(left), is significantly stretched (effectively doubling the 2D area of the manifold) with (middle) and without the
proposed damping (right). Green lines denote lower stretching while red lines denote higher stretching. The figure on the right
shows a phase of the system oscillations, i.e. the system cannot converge to a stable state. Even though the proposed force
model is quite stable in simple draping situations, under very high stretch it is necessary to employ the proposed damping
scheme.
tions were enough for the conjugate gradient method
to converge to a physically plausible solution, just
as (Baraff and Witkin, 1998).
4.1 Damping
Damping plays a significant role in the stability of
the numerical system (Nealen et al., 2006; Baraff and
Witkin, 1998; Schmedding et al., 2009). In general,
damping derives from both the intrinsic properties of
the modeled material and the artificial damping in-
duced by the numerical integration scheme. A sim-
ple and widely used approach is to apply a damping
force along the direction of the relative velocity be-
tween two particles (Choi and Ko, 2002; Nealen et al.,
2006; Schmedding et al., 2009). We also employ
this method in our work. However, the non-linear
properties of the full cubic force magnitude result in
high stiffness and therefore the system is sensitive to
yield undesired out-of-plane oscillations that the rela-
tive velocity damping is not guaranteed to resolve. In
particular, if we express the derivative of the force as
∂f
i
∂x
j
= Ic+a|∆x
i, j
|
2
I+ 2
∆x
i, j
∆x
T
i, j
∆x
T
i, j
∆x
i, j
!
+
b|∆x
i, j
|
I+
∆x
i, j
∆x
T
i, j
∆x
T
i, j
∆x
i, j
!
+
d
|∆x
i, j
|
I−
∆x
i, j
∆x
T
i, j
∆x
T
i, j
∆x
i, j
!
(9)
we can distinguish between the effect of each pa-
rameter a, b, c and d to the Jacobian. In general, pa-
rameters with negative values may introduce negative
eigenvalues in the system that will affect stability.
Solving the linear system (8) for the four param-
eters, b and d take negative values (considering that
K < K
1
, K < K
2
and L, a
1
, a
2
take positive val-
ues). Especially in the case of parameter d, the
term
I−
∆x
i, j
∆x
T
i, j
∆x
T
i, j
∆x
i, j
expresses stiffness orthogonal
to the interaction direction, i.e. out-of-plane direc-
tion, which is something that can cause problems in
simulations (Choi and Ko, 2002).
In previous approaches, terms that end up to nega-
tive eigenvalues (such as the two last terms of the right
part of equation 9) were either disregarded (Volino
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
50

and Thalmann, 2000; Choi and Ko, 2002) or their ef-
fect was reduced using specially designed damping
forces (Baraff and Witkin, 1998). Completely disre-
garding these terms resulted in excessively resisting
to bending in our simulations. Instead of this, we re-
duced, by a small percentage, the absolute values of
the parameters b and d only in the calculation of the
Jacobian (effectively “damping” specific terms of the
Jacobian). This way we can avoid adding more forces
in our scheme and effectively reduce out-of-plane os-
cillations.
Figure 3 shows an example of a particle system
with and without the proposed damping. The system
is fixed on the edges and is left draping under its own
weight. By moving further the fixed edges, the sys-
tem is stretched reaching to a final position that is al-
most twice the the size of the textile at its rest state.
This excessive stretching generates high valued inter-
particle forces that also “stretch” the numerical solver
(in the draping state, i.e. low stretch, the force val-
ues are close to the ones of a simple linear spring and
no safe conclusions can be drawn about the stability
of the proposed force). When the proposed damping
scheme is not used, the system cannot converge to a
stable state and oscillates in the out-of-plane direction
(Figure 3 right). If we reduce the parameters b and d
to 99% of their absolutes values in the calculation of
the Jacobian then the system performs robustly and
converges to a stable stretched state (Figure 3 mid-
dle).
Note that a consequence of this kind of damping
is that it artificially dissipates energy from the system
and resists to bending (Volino and Thalmann, 2000;
Choi and Ko, 2002; Baraff and Witkin, 1998). Even
so, it is still possible to ignore it in applications that
high stretching is not directly applied to the particle
system without affecting the stability of the system.
5 EXPERIMENTAL RESULTS
We have tested the proposed method in technical sim-
ulations, both with solids and textiles, that involve
high scales of forces applied to the deformed ma-
terials, yet these forces are generated directly from
conditions of the virtual worlds. We also evaluated
the effect of the constraint parameters (section 3.2)
to the behavior of the cloth under simple draping.
The whole experimental setup was implemented us-
ing C++ on a Core2 6600 2,4GHz CPU PC with 2GB
of RAM and a GeForce 7600 GS Graphics Card.
For comparison we have also implemented: 1)
a simple linear model, 2) the StVK triangle based
method described in (Volino et al., 2009) (we refer
Figure 4: A heavy ball falling into a cloth. The weight of
the ball is 10 kg, effectively 10 times the total weight of
the cloth. The particle system consists of 1024 and the pa-
rameters of the system are: L = 2cm, a
1
= 1.04, a
2
= 0.96,
K = 1000N/m, K
1
= 6K, K
2
= 2K. The proposed method
can robustly handle the heavy ball (left) while a mass-spring
system set to the same base stiffness K allows unrealistic
over-elongation of the cloth (right). Testing larger values of
K led to partially or totally unstable simulations.
Figure 5: A heavy cube hanging from a cloth. The weight of
the cube is 5 kg, effectively 5 times the weight of the cloth.
The rest of the parameters are set to L = 2cm, K = 500N/m,
a
1
= 1.1, a
2
= 0.9, K
2
= 2K, K
1
= 6K. Again, testing larger
values of K led to partially or totally unstable simulations.
Figure 6: Deformable cube simulation composed of 729
particles. The cube can react robustly both under low defor-
mation (left), such as linear models do, but can also resist
to high compression (right). In this test (right) neither the
linear or the StVK models managed to resist compression
and completely collapsed, resulting in unacceptable visual
outcome. The cube weight was 5kg which is almost 7 times
the mass of the deformed cube. The rest of the parameters
are: L = 2cm, K = 1000N/m, a
1
= 1.1, a
2
= 0.9, K
2
= 10K,
K
1
= 6K.
A PRACTICAL APPROACH FOR APPLYING NON-LINEAR DYNAMICS TO PARTICLE SYSTEMS
51
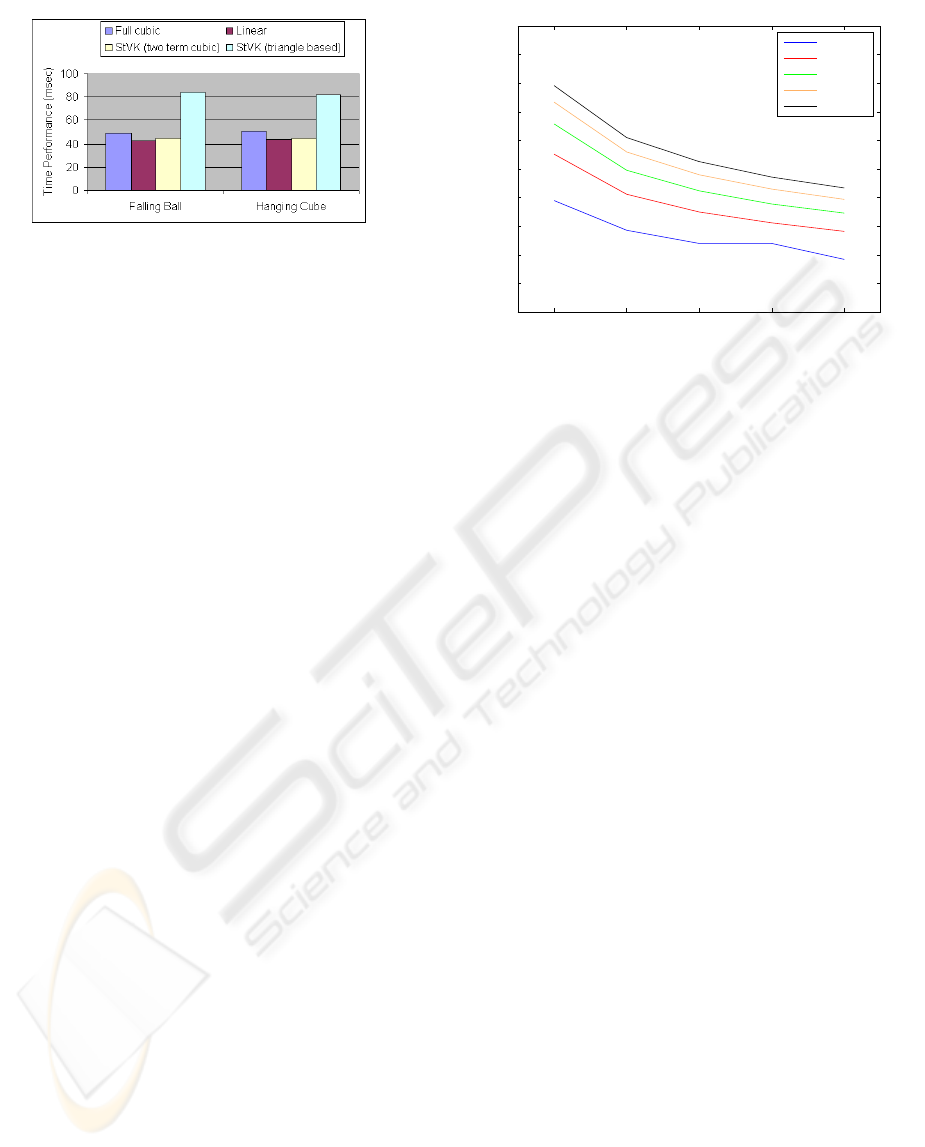
Figure 7: Timing Performance of the compared methods.
The StVK (two term cubic) model refers to method of
(Kikuuwe et al., 2009) while the StVK (triangle based)
refers to the one of (Volino et al., 2009). The proposed
method is insignificantly slower (10%) than the linear and
the two term cubic models while it is considerably faster
(40%) than the triangle based StVK.
to it as triangle based because the calculations re-
quire knowledge of the triangle structure of the mesh)
and 3) the spring network of (Kikuuwe et al., 2009),
which essentially employs a cubic force with two
terms. Methods 1 and 3 were tested in all simulations
while method 2 was tested only in cloth simulations
since it is specialy described for these purposes. We
have not compared with any full FEM method since
recent results of (Kikuuwe et al., 2009) showed that
method 3 is much faster than full FE implementa-
tions. Note also that this comparison is performed
under the scope of a general evaluation of the results,
since none of these works specifically aimed at sim-
ulating adaptive models that resist high value forces.
To our knowledge, they are not any methods in the
literature that have dealt with this particular problem.
Figure 4 shows a heavy ball falling into the surface
of a cloth. The proposed force model allows small de-
formations of the cloth so that it looks loose (and not
stiff) while can also resist to the weight of the ball. A
linear force which allows the same level of small de-
formation is unable to realistically hold the ball. Fig-
ure 5 illustrates a similar example where one edge of
a cloth is connected to a heavy cube while the other
one is fixed. Again the proposed approach manages
to resist over-elongation compared to a linear model
with the same parameters.
Figure 6 shows an example of a deformable solid
cube modeled by a particle system and the proposed
force. The proposed method is able to react both to
small deformations, like the interactive stretching dis-
played in the left image, and also resist the compres-
sion caused by the heavy cube. The linear model re-
sulted in similar behavior for small deformation but
completely collapsed under compression. Likewise,
while in both cloth applications the StVK methods
produced similar results with the proposed method
2 4 6 8 10
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
K1 (multiples of K)
Average Stretch Ratio
a1=0.02
a1=0.04
a1=0.06
a1=0.08
a1=0.1
Figure 8: Deformation rates for different constraint param-
eters. For testing stretching, we measured the average de-
formation ratio of a cloth with one edge fixed draping under
its own weight. The results show that we can achieve sim-
ilar results with a different combination of the parameters,
thus the proposed constraint based parameterization is very
adaptive to application requirements.
(allowing a bit more elongation which did not af-
fect much the level of realism however), we could
not produce a visually acceptable result using the
two-term StVK force of (Kikuuwe et al., 2009) (the
triangle-based StVK does not apply directly to solids)
since StVK materials are softer under compression
and eventually collapse due to the weight of the heavy
cube.
In figure 7 we display the comparative timing re-
sults for the two cloth applications. The timing cal-
culations include the calculation of the force values,
the calculation of the Jacobian and the iterations of
the Conjugate Gradient. The proposed method is ap-
proximately 5-10% slower than the linear model and
(Kikuuwe et al., 2009) which is something expected
since these models employ computationally simpler
forces. However, note that the linear method failed in
all simulations, (Kikuuwe et al., 2009) failed in the
compression of the deformed solid and the time dif-
ference is not so significant. Compared to the contin-
uum based StVK of (Volino et al., 2009), the proposed
method is approximately 40% faster.
In the last figure 8 we display the average defor-
mation rate of a cloth according to different constraint
parameters. The cloth was simply left draping under
its own weight until it stopped. The diagram shows
that the proposed model can effectively produce sim-
ilar deformation ratios with various combinations of
the constraints.
This allows the user to adjust the parameters ac-
cording to the restrictions imposed from different
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
52

parts of the application. For example, if large val-
ues of K are not desired but the average stretch ratio
should remain at a low level (e.g. solids that practi-
cally keep their volume but have soft surface), then a
lower value for a
1
can achieve the desired result with-
out this increase in stiffness K.
6 CONCLUSIONS
In this paper we presented a particle system that uti-
lizes a full cubic formulation of the inter-particle force
to apply non-linear deformation resistance to simula-
tion conditions of high scale. We also introduced a
constraint based force parameterization for adjusting
the proposed force and described the details regarding
the necessary damping that the presented non-linear
scheme requires in order to ensure numerical stability.
The proposed method is conceptually simple to im-
plement and parameterize according to practical con-
siderations. We showed that the presented method can
robustly handle deformable models that are subject to
environment forces of high scale, both for stretching
and compression. Since the presented force is imple-
mented with particle systems, it has very efficient tim-
ing performance, comparable to simple linear models.
REFERENCES
Baraff, D. and Witkin, A. (1998). Large steps in cloth sim-
ulation. In SIGGRAPH ’98, pages 43–54.
Barbi
ˇ
c, J. and James, D. L. (2005). Real-time subspace inte-
gration for St. Venant-Kirchhoff deformable models.
ACM Transactions on Graphics (SIGGRAPH 2005),
24(3):982–990.
Breen, D. E., House, D. H., and Wozny, M. J. (1994). Pre-
dicting the drape of woven cloth using interacting par-
ticles. In SIGGRAPH ’94, pages 365–372.
Choi, K.-J. and Ko, H.-S. (2002). Stable but responsive
cloth. ACM Trans. Graph., 21(3):604–611.
Choi, K.-J. and Ko, H.-S. (2005). Research problems
in clothing simulation. Computer-Aided Design,
37:585–592.
Delingette, H. (2008). Triangular springs for modeling non-
linear membranes. IEEE Transactions on Visualiza-
tion and Computer Graphics, 14(2):329–341.
Duriez, C., Dubois, F., Kheddar, A., and Andriot, C. (2006).
Realistic haptic rendering of interacting deformable
objects in virtual environments. IEEE Transactions on
Visualization and Computer Graphics, 12(1):36–47.
Etzmuss, O., Gross, J., and Strasser, W. (2003). Deriving
a particle system from continuum mechanics for the
animation of deformable objects. IEEE Transactions
on Visualization and Computer Graphics, 9(4):538–
550.
Goldenthal, R., Harmon, D., Fattal, R., Bercovier, M., and
Grinspun, E. (2007). Efficient simulation of inexten-
sible cloth. ACM Transactions on Graphics (Proceed-
ings of SIGGRAPH 2007), 26(3).
Irving, G., Schroeder, C., and Fedkiw, R. (2007). Volume
conserving finite element simulations of deformable
models. In SIGGRAPH ’07, page 13.
Irving, G., Teran, J., and Fedkiw, R. (2004). Invertible fi-
nite elements for robust simulation of large deforma-
tion. In ACM SIGGRAPH/Eurographics symposium
on Computer animation, pages 131–140.
Kikuuwe, R., Tabuchi, H., and Yamamoto, M. (2009).
An edge-based computationally efficient formulation
of saint venant-kirchhoff tetrahedral finite elements.
ACM Trans. Graph., 28(1):1–13.
Lloyd, B., Szekely, G., and Harders, M. (2007). Identifica-
tion of spring parameters for deformable object simu-
lation. IEEE Transactions on Visualization and Com-
puter Graphics, 13(5):1081–1094.
Moore, P. and Molloy, D. (2007). A survey of computer-
based deformable models. In IMVIP ’07: Proceed-
ings of the International Machine Vision and Image
Processing Conference, pages 55–66.
Nealen, A., Mueller, M., Keiser, R., Boxerman, E., and
Carlson, M. (2006). Physically based deformable
models in computer graphics. Computer Graphics Fo-
rum, 25(4):809–836.
Picinbono, G., Delingette, H., and Ayache, N. (2003). Non-
linear anisotropic elasticity for real-time surgery sim-
ulation. Graph. Models, 65(5):305–321.
Provot, X. (1995). Deformation constraints in a mass-spring
model to describe rigid cloth behavior. In Graphics
Interface ’95, pages 147–154.
Schmedding, R., Gissler, M., and Teschner, M. (2009). Op-
timized damping for dynamic simulations. In Spring
Conference on Computer Graphics, Budmerice, Slo-
vakia, pages 205–212.
Selle, A., Lentine, M., and Fedkiw, R. (2008). A mass
spring model for hair simulation. ACM Trans. Graph.,
27(3):1–11.
Selle, A., Su, J., Irving, G., and Fedkiw, R. (2009). Robust
high-resolution cloth using parallelism, history-based
collisions, and accurate friction. IEEE Transactions
on Visualization and Computer Graphics, 15(2):339–
350.
Terzopoulos, D., Platt, J., Barr, A., and Fleischer, K. (1987).
Elastically deformable models. In SIGGRAPH ’87,
pages 205–214.
Volino, P., Faure, F., and Magnenat-Thalmann, N. (2009).
Simple, yet accurate tensile stiffness. ACM Trans.
Graph., 28(4).
Volino, P. and Thalmann, N. M. (2000). Implementing fast
cloth simulation with collision response. In CGI ’00:
Proceedings of the International Conference on Com-
puter Graphics, page 257.
Wu, Z., Au, C., and Yuen, M. (2003). Mechanical proper-
ties of fabric materials for draping simulation. Inter-
national Journal of Clothing Science and Technology,
15(1):56–68.
A PRACTICAL APPROACH FOR APPLYING NON-LINEAR DYNAMICS TO PARTICLE SYSTEMS
53
