
LOCAL SEGMENTATION BY LARGE SCALE HYPOTHESIS
TESTING
Segmentation as Outlier Detection
Sune Darkner, Anders B. Dahl, Rasmus Larsen
DTU Informatics, Technical University of Denmark, Richard Petersens plads, Kgs. Lyngby, Denmark
Arnold Skimminge, Ellen Garde, Gunhild Waldemar
DRCMR, Copenhagen University Hospital Hvidovre, Kettegaard Alle 30, DK 2650 Hvidovre, Denmark
Memory Disorders Research Group, Department of Neurology, Copenhagen University Hospital, Copenhagen, Denmark
Keywords:
Segmentation, Outlier detection, Large scale hypothesis testing, Locally adjusted threshold.
Abstract:
We propose a novel and efficient way of performing local image segmentation. For many applications a thresh-
old of pixel intensities is sufficient. However, determining the appropriate threshold value poses a challenge. In
cases with large global intensity variation the threshold value has to be adapted locally. We propose a method
based on large scale hypothesis testing with a consistent method for selecting an appropriate threshold for the
given data. By estimating the prominent distribution we characterize the segment of interest as a set of outliers
or the distribution it self. Thus, we can calculate a probability based on the estimated densities of outliers
actually being outliers using the false discovery rate (FDR). Because the method relies on local information it
is very robust to changes in lighting conditions and shadowing effects. The method is applied to endoscopic
images of small particles submerged in fluid captured through a microscope and we show how the method can
handle transparent particles with significant glare point. The method generalizes to other problems. This is
illustrated by applying the method to camera calibration images and MRI of the midsagittal plane for gray and
white matter separation and segmentation of the corpus callosum. Comparing this segmentation method with
manual corpus callosum segmentation an average dice score of 0.88 is obtained across 40 images.
1 INTRODUCTION
We present a novel way of performing binary seg-
mentation of images with large global variations. In
many segmentation problems such as global changes
in illumination, shadows, or background variations, a
global threshold is not a feasible solution. Variations
in pixel intensities can result in large segmentation er-
rors if one global threshold value is applied. As a
consequence the threshold has to be locally adapted.
Another problem is the dominating backgroundinten-
sities, which makes typical histogram based methods
like histogram clustering (Otsu, 1975) inappropriate.
We propose a method based on the assumption
that a local threshold exists, which will separate the
segment of interest from the background. We present
a well defined way of selecting the appropriate thresh-
old value given the observations based on a large scale
hypothesis test and experimentally show that this as-
sumption is appropriate for many real segmentation
problems.
2 PREVIOUS WORK
Segmentation is a widely used technique in com-
puter vision for identifying regions of interest. Basic
threshold is a simple, very robust and fast approach
for performing segmentation. It is applicable for a
wide range of segmentation problems where regions
of interest have intensity levels which differers from
the remainder of the scene. Many techniques have
been developed for identification of suitable thresh-
old.(Sezgin and Sankur,2004) givesan overview. The
simplest approach is to perform a global threshold for
the whole image e.g. based on the shape of the in-
tensity histogram (Sezan, 1990), applying a Gaussian
215
Darkner S., B. Dahl A., Larsen R., Skimminge A., Garde E. and Waldemar G. (2010).
LOCAL SEGMENTATION BY LARGE SCALE HYPOTHESIS TESTING - Segmentation as Outlier Detection.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 215-220
DOI: 10.5220/0002845402150220
Copyright
c
SciTePress

mixture model (Hastie et al., 2001) or by performing
clustering (Otsu, 1975). Local methods have an adap-
tive threshold, which varies across the image. As a
result the local methods are suited for images with
global intensity variations (Stockman and Shapiro,
2001).
Images with regions of interest taking up a small
proportion of the image poses a challenge. Histogram
shape or clustering methods will be inadequate for
finding a good threshold since the regions of inter-
est will almost invisible in the histogram. (Ng, 2006)
suggested a threshold at a valley in the histogram
while maximizing the between segment variation sim-
ilar to Outss method (Otsu, 1975). This requires a
two-peaked distribution of the histogram, which lim-
its the applicability of the method.
Our method provides a good solution to a wider
class of intensity distribution. It can be applied both
as a global and local segmentation method which
makes it very flexible. Our approach is based on the
assumption of a given intensity distribution that can
be estimated from the observed distribution. For each
intensity value there is a probability of belonging to
this distribution, which can be compared to the ac-
tual observed distribution. The difference between
the expected distribution and the observed can be in-
terpreted as false discoveries used for identifying the
threshold value. This idea originates from (Efron,
2004), who used it for identifying observations of in-
terest in genome responses.(Darkner et al., 2007) Ap-
plied it for shape analysis.
The rest of the paper is organized as follows. First
we describe the details of our method, and following
that we describe and discuss our experiments, and fi-
nally we conclude our work.
3 LARGE SCALE HYPOTHESIS
TESTING
The point of large-scale testing is to identify a small
percentage of interesting cases that deserve further
investigation using parametric modeling. The prob-
lem is that a part of the interesting observations may
be extracted, but if more are wanted then also unac-
ceptably many false discoveries are identified (Efron,
2004). A major point of employing large-scale esti-
mation methods is that they facilitate the estimation
of the empirical null density rather than using the the-
oretical density. The empirical null may be consid-
erably more dispersed than the usual theoretical null
distribution. Besides from the selection of the non-
null cases (the selection problem) large-scale testing
also provides information of measuring the effective-
ness of the test procedure (estimation problem). In
this paper we employ both measures to separate the
particles from the background transform calibration
images into binary images, segment the corpus cal-
losum and separate white and gray matter in brain
images. Simultaneous hypothesis testing is founded
on a set of N null hypotheses {H
i
}
N
i=1
, test statistics
which are possibly not independent. {Y
i
}
N
i=1
and their
associated p-values { P
i
}
N
i=1
defining how strongly the
observed value of Y
i
contradicts H
i
.
3.1 False Discovery Rate
In this paper we assume the N cases are divided into
two classes, Null and non-null occurring with prior
probabilities p
0
and p
1
= 1− p
0
. We denote the den-
sity of the test statistics given its class f
0
(z) and f
1
(z)
(null or non-null respectively). False discovery rate
(FDR) methods are central to some largescale method
and is employed here. It is typical to consider the ac-
tual distribution as a mixture of outcomes under the
null and alternative hypotheses. Assumptions about
the alternative hypothesis may be required. The sub-
densities
f
+
0
(z) = p
0
f
0
(z) , f
+
1
(z) = p
1
f
1
(z) (1)
and mixture density
f(z) = f
+
0
(z) + f
+
1
(z) (2)
leads directly to the local false discovery rate:
fdr(z) ≡ P(null|z
i
= z)
= p
0
f
0
(z)/ f(z) = f
+
0
(z)/ f(z) (3)
The FDR describes the expected proportion of false
positive results among all rejected null hypotheses
and guarantees that the fraction of the number of false
positives over the number of tests in which the null
hypothesis was rejected (Efron, 2004). Figure 1 and
2 illustrates the fundamentals of the approach.
For segmentation of particles the hypothesis test
is used to find pixels that are a part of a segment i.e.
observations that deviates significantly from the av-
erage local background. We use large-scale testing
to estimate the empirical null hypothesis for a given
region assuming the pixel values follows some nor-
mal distribution. It is convenient to consider z
i
=
Φ
−1
(P
i
), i = {1...N} where Φ is the standard nor-
mal cdf and z
i
|h
i
∼ N(0,1). Estimates of the pixel er-
ror and confidence bounds can be mapped to N(0,1)
through Φ. As an example of prior information for
particles we see that the background has higher pixel
intensities than the particles. The background will
therefor be the highest and largest distribution. This
can be used to get a better empirical estimate of of the
null hypothesis.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
216
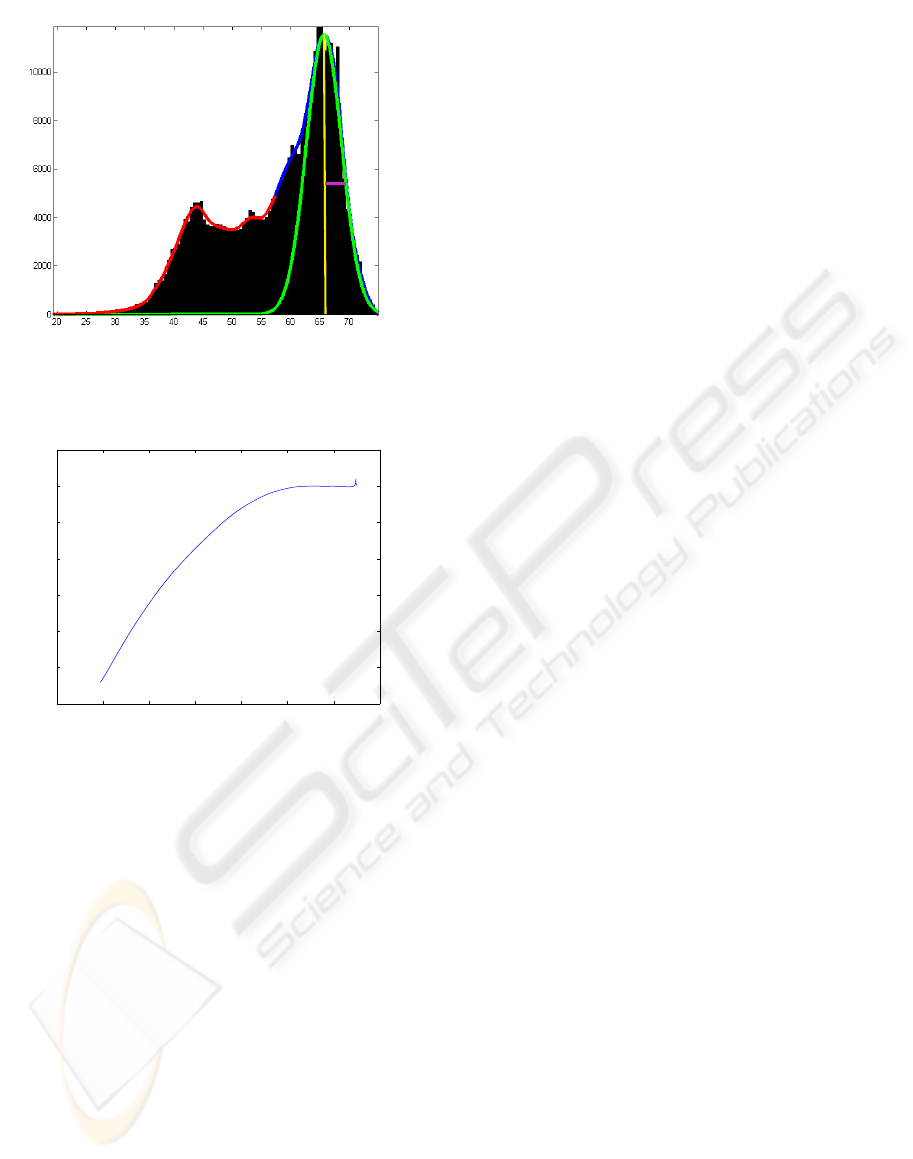
Figure 1: The graphical presentation of large scale hypoth-
esis test. The red and blue curve is f(z), the green is the pdf
of the estimated null hypothesis f
+
0
(z) where the yellow is
the mean and the purple is the half width half maximum.
10 20 30 40 50 60 70 80
−120
−100
−80
−60
−40
−20
0
20
log(FDR)
Intensity
Figure 2: The corresponding logarithm of FDR for Figure
1.
3.2 Estimation of H
0
Assuming that the prominent distribution follows a
normal distribution we are able to estimate H
0
. Thus
for the estimation we choose an appropriate resolu-
tion and map all value into the histogram. This forms
our joint distribution f(z) to which we then fit a spline
with appropriate smoothness for an approximation of
the joint distribution. We can then identify the first
large peak as the mean value of f
+
0
(z) and use half
width, half maximum to estimate the standard devi-
ation i.e. the maximum peak of f(z) and half of the
width (see Figure 1). The obvious choice would be
full width half maximum, however there is a blending
of in the joint distribution of f
+
0
(z) and f
+
1
(z) which
gives a thicker tail towards lower intensity values and
a much more conservative estimate of the standard de-
viation (see Figure 1). The estimation of f
+
0
(z) is a
good place to apply prior knowledge of the distribu-
tions such as ordering etc.
3.3 Parameters and Their
Interpretation
In practice several parameter have to be selected. The
first is the level at which we are willing to accept false
positives which is the an expression of the certainty
that a given observation is significantly different from
H
0
. This does not in anyway tell us that the class is a
certain kind of tissue or particle, only that this is with
certainty p different from the null distribution thus the
observation is an outlier.
The testing area has to be selected. This criteria is
mainly driven by the object in question and the back-
ground. Sufficient information about the distribution
of the object and background must be present. The
spatial sampling density has to be selected as well.
In all experiments in this paper we have up-sampled
the image by a factor of 10-100 which also yields an
equal sub-pixel resolution of the method. Usually the
test is based on 10
5
− 10
6
samples and in a 100 bin
histogram which ensures smooth estimate of f(z) and
enough resolution for gray values. In practice f(z)
is approximated by a spline thus the smoothness has
to be selected for good estimation of f
+
0
(z) and can
compensate for low number of sample.
4 EXPERIMENTS
We have applied the method to 3 sets of data. Small
particles obtained with high magnification, 2D slices
of brain MRI for segmentation of the Corpus Callo-
sum and a standard checker board for image calibra-
tion with highly varying intensity values. These 3 di-
verse applications show the versatility of this simple
but robust method. For all examples we have shown
the sampling area in the sampling resolution for both
segmentation and object.
4.1 Particles
For characterization of powders, droplets etc the size
and shape of the objects are very important. In or-
der to do a good classification the particles need to be
found and properly segmented. The method is well
suited for images where the light source changes in
intensity and distribution locally (e.g. shadows) and
globally (e.g. illumination) from frame to frame in
a series of images, cases where robust estimate for
background removal can be difficult to obtain. In ad-
dition some particles may partially shadow other par-
ticles thus making the global background removal in-
capable of segmenting the particle in question. The
method has been tested on 3 types of particle images.
LOCAL SEGMENTATION BY LARGE SCALE HYPOTHESIS TESTING - Segmentation as Outlier Detection
217
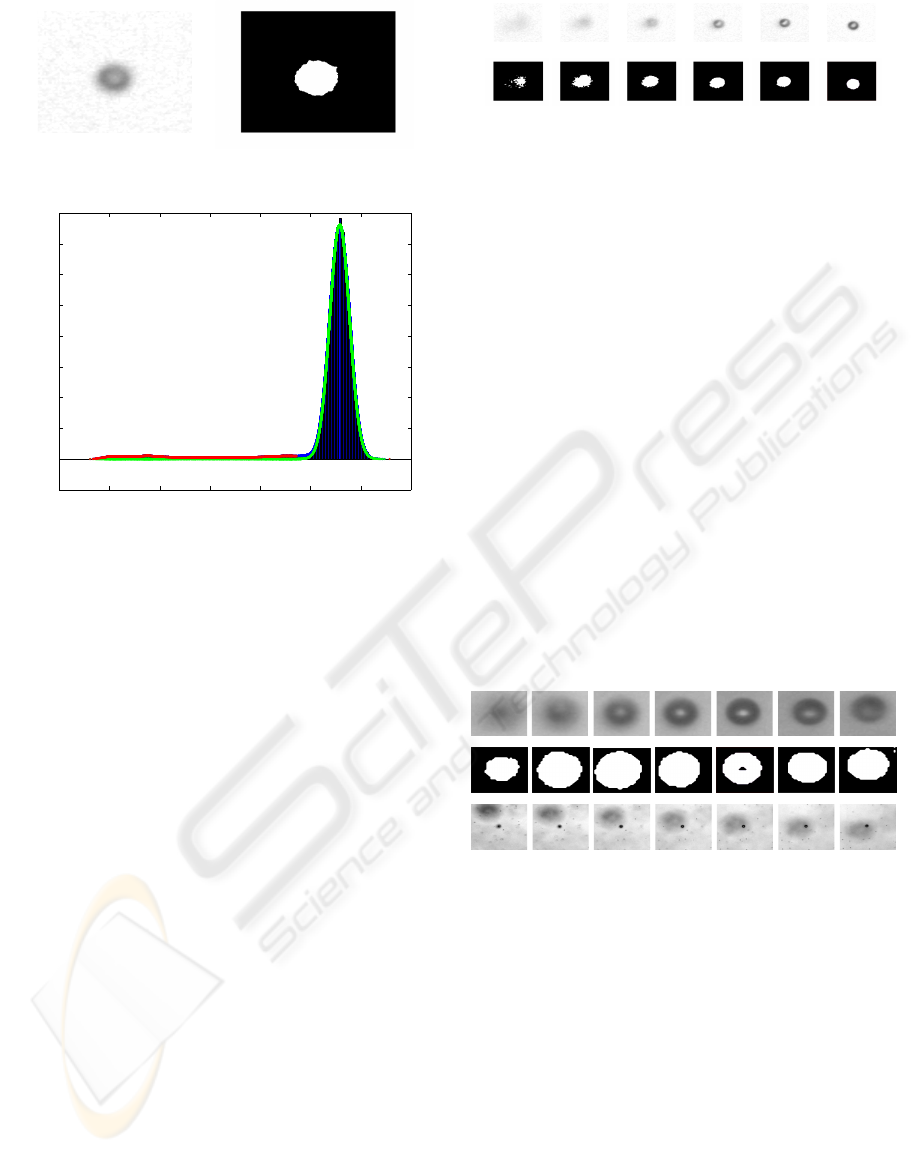
(a) The particle (b) The segmentation
100 120 140 160 180 200 220 240
−1000
0
1000
2000
3000
4000
5000
6000
7000
8000
(c) The hypothesis test histogram
Figure 3: A typical segmentation and the corresponding his-
togram. The green line in the histogram is the estimated
H
0
and the red line indicates outlier with the fdr=0.0001
The histogram clearly show how well our assumption of the
background following a normal distribution holds. The out-
lier are the particle we segmenting.
A set of LED back lit particles suspended between
2 sheets of glass with varying distance to the focus
plane . A tracking scenario with time series of cali-
brated particles suspended in water and laser back lit
non-uniform particles suspended in water.
4.1.1 Fixed Particle
We have applied the method to the 25 µ m particles
suspended in water between two sheets of glass in
with different distances to the focal plane. Figure 4
show a 25 µ m particle at 6 distances to the focal
plane. This experiment illustrates the sensitivity of
the method, where even vaguely visible particles can
be segmented without parameter tuning. The thresh-
old was selected on the criteria that the possibility of
a false positive should be less than 0.01%, the size of
the window is 40× 40 and the sampling resolution in
each direction is 0.1 pixel.
Figure 4: The images show the particle at 6 different dis-
tances to the focal plane, with the las image being of the
particle in focus. Below are the segmentations of each od
the images in the same order. The images show that the par-
ticle can be segmented even if the signal is very vague and
the glare point is correctly classified as a part of the particle.
4.1.2 Shadowing Effect
We have preprocessed all images with multi scale
blob detection (Bretzner and Lindeberg, 1998) such
that we have rough estimate of the size and location
of the blobs. This is sufficient to perform the segmen-
tation. The data consists of movie sequences obtained
with 5 times magnification of semi transparent parti-
cles of 100, 50, 25 and 5 µm in a water solution and
used for illustration of handling of shadowing effects
without change to the parameters of the algorithm.
Figure 5 show a segmentation performed over sev-
eral frames where a larger particle passes in the back-
ground creating a shadowing effect. The example il-
lustrates how the methods can handle changes in the
illumination without failure. The threshold was se-
lected with p = 0.0001, windowsize of 20× 20 pixel
with a sampling resolution of 0.1 pixel.
Figure 5: The figure show a segmentation performed with
the same parameters on the same object subject to changing
shadowing effect caused by a large particle passing in the
background.
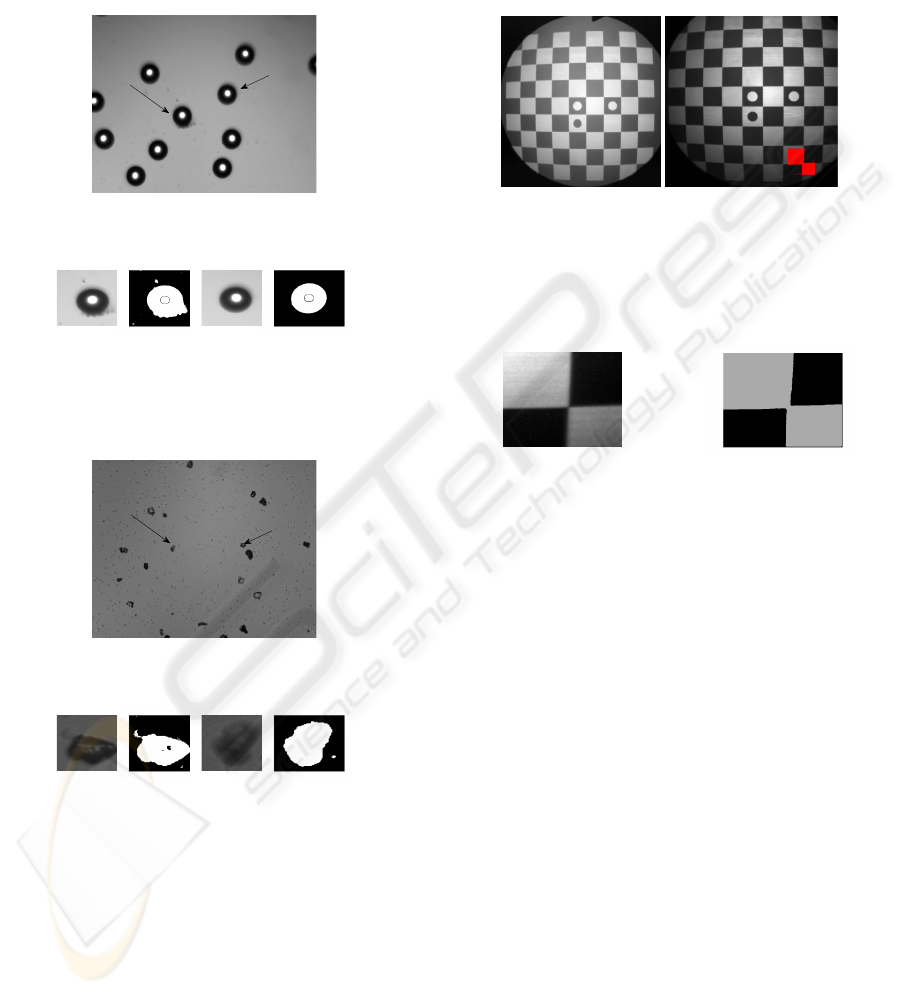
4.1.3 Real Particles
To show how the method handles real world data we
have segmented some particles of some material sam-
ples from the industry. Figure 6 and 7 show two
small examples of such particles. The segmentation
is very good due to the locally very uniform back-
ground, making the distribution of peaked and narrow
i.e. a small standard deviation. Glare points are also
handled very well but there is naturally enough a band
around the glare point where the particle is misclassi-
fied. This is due to the fact that the method is just a
simple threshold without any spatial prior. These gaps
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
218
can be handled by applying an appropriate post pro-
cessing step. The results in figure 6 was made with
p = 0.0001 and a window of 200× 200 with a sam-
pling resolution of 0.3 pixels and the results in figure
7 with a window of 100× 100 same p and same reso-
lution.
(a) The original image
Figure 6: The figure show some real world samples. The
figure show that the segmentation the glare points is han-
dled very well. The small ’gap’ can be fixed by a simple
morphological operation.
(a) The original image
Figure 7: Some crystal like particles are shown in the figure.
In spite of the relative low difference between background
and object and the fact that the samples are semi transparant,
the segmentation is good. Even small ones are handled to-
gether with the large ones.
4.2 Calibration Images
We also present some results on calibration images.
When using a well known structure as the checker-
board for calibration it is important to exactly locate
the corner of the squares i.e. by morphological opera-
tions on a segmented image. The proposed method
delivers very good segmentation and it is expected
that it can be used to derive the exact sub-pixel po-
sition of the corners creating a robust foundation for
image calibration. Figure 8 and 9 show the results of
the segmentation. The results in Figure 9 was made
with p = 0.0001 and a window of 100 × 100 with a
sampling resolution of 0.3 pixels.
(a) The calibration
image
(b) The calibration im-
age with the segmenta-
tion marked
Figure 8: The original calibration image. As can be seen
the intensities varies significantly with the highest values at
the center and decaying radially.
(a) Segmented image
part
(b) Segmentation
Figure 9: The changes in gray scale values are handled quite
nicely, but causes the little gap between the two black cor-
ners in the segmentation. This can be close with morpho-
logical operations.
4.3 MRI
To illustrate the method on another modality, we have
applied the method to MRI scans of the human human
brain, more precisely the midsagittal plane that con-
tain the corpus corpus callosum (see Figure 10(a)).
The method has applied to white and gray matter
segmentation and segmentation of the corpus callo-
sum. In the latter case we have a manually segmented
ground truth, thus we can compute the segmentation
error via the Dice coefficient (Sørensen, 1948). The
results in Figure 10 was made with p = 0.01 and a
window of 60× 80 with a sampling resolution of 0.1
pixels.
Across 40 subject with their Corpus Callosum
segmented with the AAM (Ryberg et al., 2006) and
manually corrected we found that local segmentation
through large scale hypothesis testing gave an aver-
age Dice coefficient of 0.856 with a standard devia-
tion of 0.034. The Corpus Callosum was extracted in
the same hypothesis test, however if we use the local
LOCAL SEGMENTATION BY LARGE SCALE HYPOTHESIS TESTING - Segmentation as Outlier Detection
219

(a) MRI
AAM
Manual
(b) segmentation
Figure 10: (a)The midsagittal slice from an MRI of a head.
(b) This figure show the result of the segmentation of fig
10(a) using the method proposed in this paper. The red dots
are the segmentation achieved by the AAM and the yellow
the manual segmentation. The read part of the image is the
segmentation with the our method. This result show how
efficient this algorithm is for local segmentation.
property and us a smaller window, outliers become
more significant and we get better segmentation. By
switching to a more local neighborhood we get a im-
provement of almost 3% to 0.880 and the difference
is very significant (p << 0.01) using a paired t-test.
As a last test we separated the white and gray mat-
ter. The results are a little greedy, some gray matter is
classified as white matter. This is due to the fact that
the two density functions are somewhat overlapping
and that the dark regions actually is a 3 class segmen-
tation problem making it non-binary. Some improve-
ment can be obtained by adjusting the window size
and the p-value. The results in figure 11 were made
with p = 0.01 and a window of 40 × 40 with a sam-
pling resolution of 0.1 pixels.
(a) Image (b) Image (c) Image
(d) segmentation (e) segmentation (f) segmentation
Figure 11: Some results on segmenting the white matter.
The results are a little greedy including some gray matter.
5 SUMMARY AND
CONCLUSIONS
We have presented a local adaptive method for binary
segmentation. The methods has successfully been
tested on particle images for particle segmentation,
calibration images and and midsagittal slices of MRI
for segmentation of corpus callosum and gray mat-
ter white matter segmentation. The method is very
robust with respect to changes in intensity across the
image and statistically characterizes the resulting seg-
mentation. We have shown that compared to manual
segmentation of the Corpus Callosum we can achieve
a dice coefficient of 0.88 on using a mosaic of 5
patches. The method is directly extendable to 3D,
other types of distribution. The hypothesis test and
FDR should be extended to higher dimensions that
the one dimensional case discussed here and tested on
several other types of images. furthermore the algo-
rithm should be implemented such that it can handle
multiple classes and segment a whole image at once.
REFERENCES
Bretzner, L. and Lindeberg, T. (1998). Feature tracking with
automatic selection of spatial scales. Computer Vision
and Image Understanding, 71(3):385–392.
Darkner, S., Paulsen, R. R., and Larsen, R. (2007). Analy-
sis of deformation of the human ear and canal caused
by mandibular movement. In Medical Image Com-
puting and Computer Assisted Intervention MICCAI
2007, pages 801–8, B. Brisbane, Australia, Springer
Lecture Notes.
Efron, B. (2004). Large-scale simultaneous hypothesis test-
ing: the choice of a null hypothesis. Journal of the
American Statistical Association, 99(465):96–104.
Hastie, T., Tibshirani, R., and Friedman, J. (2001). The Ele-
ments of Statistical Learning: Data Mining, Inference,
and Prediction. Springer-Verlag.
Ng, H. (2006). Automatic thresholding for defect detection.
Pattern Recognition Letters, 27(14):1644–1649.
Otsu, N. (1975). A threshold selection method from gray-
level histograms. Automatica, 11:285–296.
Ryberg, C., Stegmann, M. B., Sj¨ostrand, K., Rostrup, E.,
Barkhof, F., Fazekas, F., and Waldemar, G. (2006).
Corpus callosum partitioning schemes and their effect
on callosal morphometry.
Sezan, M. (1990). A peak detection algorithm and its
application to histogram-based image data reduction.
Computer Vision, Graphics, and Image Processing,
49(1):51.
Sezgin, M. and Sankur, B. (2004). Survey over image
thresholding techniques and quantitative performance
evaluation. Journal of Electronic Imaging, 13(1):146–
168.
Sørensen, T. (1948). A method of establishing groups of
equal amplitude in plant sociology based on similarity
of species content and its application to analyses of the
vegetation on Danish commons. Biologiske Skrifter,
(5):1–34.
Stockman, G. and Shapiro, L. (2001). Computer Vision.
Prentice Hall PTR, Upper Saddle River, NJ, USA.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
220
