
EXPLICIT SOLUTION FOR THE MINIMUM DISTANCE
BETWEEN TWO SOLID SEMI-INFINITE CIRCULAR CONES
Baruch E. Karlin
Rafael, Aerodynamics Department, POBox 2250, Haifa, Israel
Keywords: Minimum Distance, Semi-infinite Cone, Geometric Reasoning, Explicit Solution.
Abstract: Multi-body kinematics and object rendering often involve minimum distance calculations. Explicit solutions
exist for the distance between spheres, cylinders and other simple objects. Deriving the minimum distance
between cones requires numerical minimization or geometrical approximations combined with analytical
solutions for the simpler objects. This paper describes an explicit solution for the minimum distance
between two solid semi-infinite circular cones. The method combines geometrical reasoning with analytical
derivation. The solution also includes the location of the intersection points. Solution regions are identified
and discussed. A numerical method based on minimizing the distance between two cone generators was
used as part of the verification process. The exact solution was compared to results of approximation by
regular polytopes. The explicit solution is robust, independent of coordinate system and invariant under
rigid translation and rotation of the setup.
1 INTRODUCTION
Multi-body kinematics and object rendering often
involve minimum distance calculations. Explicit
solutions exist for simple objects, including points,
lines, flat patches, spheres and cylinders. The
minimum distance between two circular cones can
be derived by numerical minimization or by
polyhedral approximation, combined with explicit
solutions for the simpler objects (The GJK
Algorithm: Gilbert 1988, Jovanoski 2008, Manchem
2009. Polytopes: Chung 1996).
The geometrical approximations have inherent
geometric inaccuracies and require iterative
refinements. Numerical procedures based on exact
parametric modeling require a good initial guess and
some number crunching. Nearly tangent cones
generators, steep slopes and discontinuities may
cause convergence difficulties. The computational
time of an iterative procedure may vary significantly
depending on the parameters of the problem.
This paper describes an explicit solution for the
minimum distance between two solid semi-infinite
circular cones. The method is based on geometrical
reasoning and vector algebra derivation. The
solution also includes the location of the intersection
points. Rendering and examples were implemented
with Matlab®.
2 METHOD
2.1 Scope
The cones dealt with in this paper are solid, circular,
semi-infinite, with positive generator angles smaller
than π/2. Axes referred to in this paper are the axes
of the cones. Each cone extends from apex to
infinity in the positive direction of its axis.
2.2 Nomenclature
a,b - cones’ axes
a,b - distances to intersection points on a and b
d - minimum distance vector between the cones
d - minimum distance between the cones
f,g - apex shift along a and b
p - minimum distance vector between axes
p - distance between cones' axes
r - extended minimum distance vector
r - length of extended minimum distance vector
α,β - generator angles of the cones
γ - positioning angle (between cones' axes)
γ
crit
- critical positioning angle
ω - rotational positioning angle of polytope
2.3 Statement of the Problem
Given the positioning of two known cones, the pro-
154
E. Karlin B. (2010).
EXPLICIT SOLUTION FOR THE MINIMUM DISTANCE BETWEEN TWO SOLID SEMI-INFINITE CIRCULAR CONES.
In Proceedings of the International Conference on Computer Graphics Theory and Applications, pages 154-159
Copyright
c
SciTePress

blem is to find the minimum distance between their
surfaces (see Figure 1). The parameters of the
problem are the generator angles, the directions of
the axes, the distance between the axes, location of
the apexes, and the positioning angle (i.e., the angle
between the axes).
Figure 1: General view of two cones.
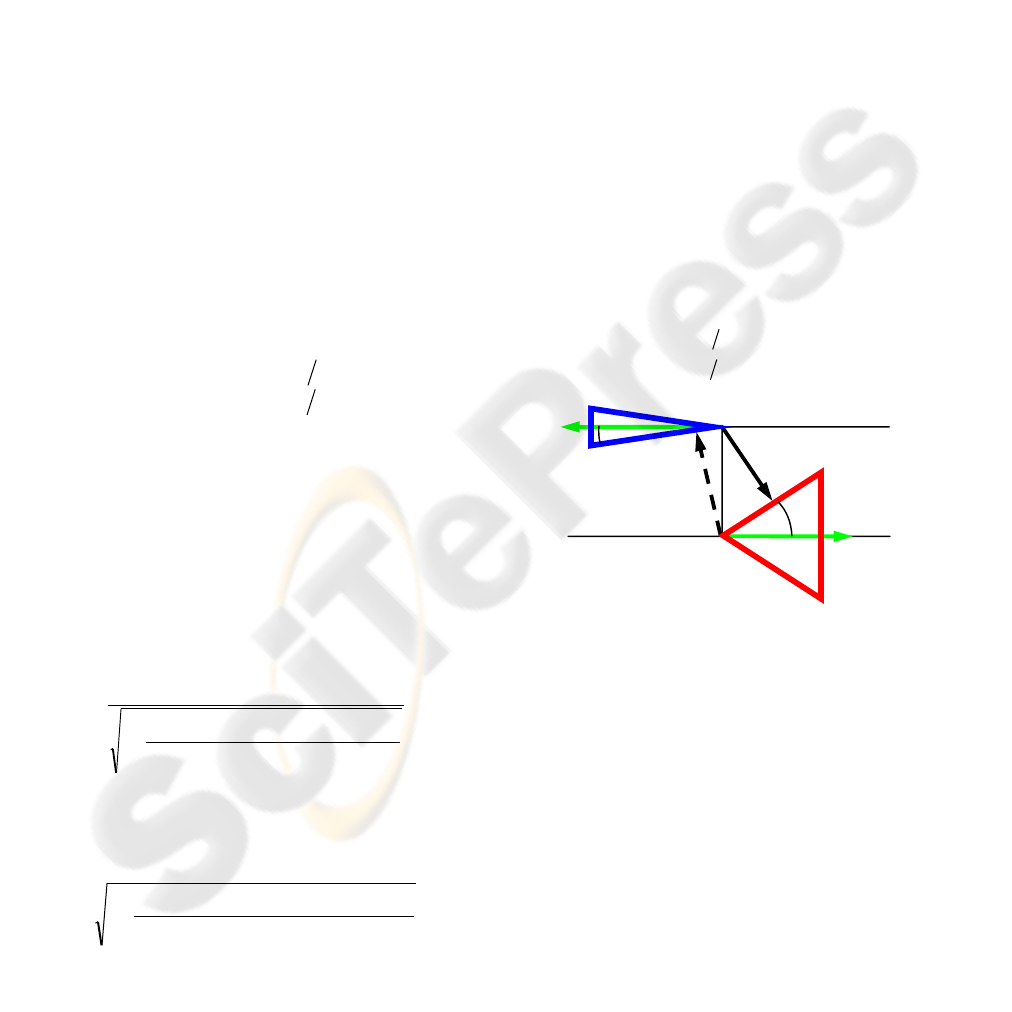
2.4 Geometric Setup
2.4.1 Non-Intersecting Axes
A-cone with axis a and generator angle α, and B-
cone with axis b and generator angle β are
positioned with angle γ and vector p between their
axes (see Figure 2). For symmetry reasons, the angle
between the axes is limited to [0, π].
Figure 2: Geometric setup – non-intersecting axes.
2.4.2 Intersecting Axes
For intersecting axes, the problem is planar. The
plane of reference contains the two axes. For each
cone, the geometric components of interest are the
axis, the apex, and the generator that lies in the
reference plane and is nearest to the other cone.
2.5 Geometric Reasoning
Geometric reasoning includes identifying the
different types of relative positioning, the geometric
characteristics of each type, and defining the
solution regions.
2.5.1 Geometric Types
There are three types of solutions: Surface-to-
Surface, Apex-to-Surface, and Apex-to-Apex. The
first two types have three regions: separation,
tangency and intersection. By definition, the third
type only has a separation region.
2.5.2 Surface to Surface
The minimum distance vector between the cones is
external and normal to both surfaces. The extended
vector intersects the A-axis at distance a from the
A-apex and the B-axis at distance b from the B-apex.
The normal to the cone is perpendicular to a specific
generator in the plane defined by the generator and
the axis (see Figure 2). The intersection point of the
extended vector with the axis is invariant in space
under translation of the cone along its axis.
2.5.3 Apex to Apex and Apex to Surface
For Apex-to-Surface, the minimum distance vector
between the cones originates at the apex of one cone
and is external and normal to the surface of the other
cone.
In the case of Apex-to-Apex, the minimum
distance vector between the cones is the vector
between the apexes.
2.5.4 Intersecting Axes
For a setup with intersecting axes, there are three
types of solutions: Apex-to-Generator, Apex-to-
Apex, and Parallel-Generators. There are also three
regions: separation, tangency and intersection.
Tangency includes coincident apexes, apex on
generator, and collinear generators.
2.6 Mathematical Formulation
2.6.1 Surface to Surface
The four vectors a, b, p, and r represented by their
unit counterparts satisfy the following relationship,
bpar
ˆ
ˆˆˆ
bpar
(1)
The dot product of the equation with each of the
Generator
Axis
Minimum
distance
Intersection
point
Axes
distance
Apex shift
Apex
EXPLICIT SOLUTION FOR THE MINIMUM DISTANCE BETWEEN TWO SOLID SEMI-INFINITE CIRCULAR
CONES
155
unit vectors gives a set of four equations,
rbrprarr
pbpppapr
bbbpbabr
abapaaar
ˆ
ˆ
ˆˆˆˆˆˆ
ˆ
ˆ
ˆˆˆˆˆˆ
ˆˆˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆˆˆˆˆˆ
bpar
bpar
bpar
bpar
(2)
The distance vector r forms an angle of α-π/2
with the A-axis and of π/2-β with the B-axis. Vector
p is, by definition, perpendicular to the axes. So the
dot products of p, r, a and b are,
sin
ˆ
ˆ
sin
ˆˆ
cos
ˆ
ˆ
;0
ˆ
ˆ
;0
ˆˆ
brar
babpap
(3)
By substituting these values into Equation 2 and
rearranging the terms, the intersection distances
satisfy the following set of linear equations,
sincos
sincos
rba
rba
(4)
Solving the two equations gives the positions of
the intersection points on the axes as a function of
the angles and the distance between them,
2
2
sinsincossin
sincossinsin
rb
ra
(5)
The distance between the intersection points
satisfies the quadratic equation,
2
22
sinsin
0sinsin
pbarr
pbarr
:or
(6)
The intersection points on the axes are invariant
under apex shifts. Substituting a and b into the
equation gives the distance between the intersection
points,
2
22
sin
sincossinsin2sin
1
p
r
(7)
For zero apex shifts, the minimum distance d
0
is
(see Figure 2),
2
22
0
sin
sincossinsin2sin
1
sinsin
p
bard
(8)
For negative values of the discriminant in
Equation 8 the cones intersect (this is unconditional
intersection). The discriminant is zero for α+β=γ,
indicating tangency at infinity. For apex shifts of f
and g (see Figure 2), the minimum distance is,
sinsin
0
gfdd
(9)
Substituting r from Equation 7 into Equation 5
gives the positioning of the extended minimum
distance vector.
2.6.2 Critical Positioning Angle
For semi-infinite cones, a and b are non-negative.
Then from Equation 5, since sin
2
γ and r are positive,
for zero apex shifts,
0sincossin
0sincossin
(10)
By geometric reasoning, for α<β the minimum
distance vector starts at the A-apex with a=0, and for
α>β the minimum distance vector ends at the B-apex
with b=0. By setting the two cases of Equation 10 to
zero, the critical value of the positioning angle for
either of the two cases is,
for
for
crit
,sinsinarccos
,sinsinarccos
(11)
Figure 3: Minimum for α>β and γ=π.
For values of the positioning angle between
critical value γ
crit
and π, the problem reduces to apex-
to-surface, and the minimum distance is constant
(see Figure 3),
forpbapd
forbpapd
tan,0,cos
0,tan,cos
(12)
For
=
(identical cones) and γ
crit
=π, the two
generators associated with the minima are parallel.
Any vector that is parallel to the minimum distance
vector between the two apexes (region marked in
yellow in Figure 4) is also a solution,
tan,cos pbapd
(13)
β
α
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
156

Figure 4: Minimum for α=β and γ=π.
2.6.3 Apex Positioning
From Equation 9, any combination of shifts of the
cones along their axes that satisfies the equation
0
sinsin dgf
brings the cones into
tangency. In particular, it happens with translation of
the A-cone by
sin
0
d
or translation of the
B-cone by
sin
0
d
along the appropriate axis.
Shifts beyond the point of tangency give a negative
minimum distance and cause intersection of the
cones. These are conditional tangency and
intersection (they depend on shift values).
For the special case α=β and γ=π (Equation 13),
the minimum reduces to a single line for a relative
apexes shift that is equal to p·tanα. For a larger shift,
the minimum distance is the distance between the
apexes. A relative shift of –p·cotα brings the cones
into tangency along segments of the two generators.
A larger shift in that direction causes intersection of
the cones.
2.6.4 Apex-to-Apex
In the Apex-to-Apex case, for each of the two cones,
define a cone with coinciding apex, axis in the
opposite direction, and generator angle of π/2-α or
π/2-β. These are the complementary cones. When
any of the cones is included entirely in the other
complementary cone, the minimum distance is the
distance between the apexes.
2.6.5 Identical Cones
When the two generator angles are equal,
=
, the
cones are identical. From Equation 8, the minimum
distance between the surfaces is then,
2sinsin1
22
0
d
(14)
This solution has three regions: (i) separation for
γ>2α; (ii) tangency of the surfaces at infinity for
γ=2α; (iii) intersection for γ<2α. Hence, regular
identical cones intersect when half the angle
between their axes is smaller than the generator
angle. Otherwise, there is a regular minimum
distance solution for cones with un-shifted apexes.
2.7 Intersecting Axes
2.7.1 Coincident Apexes
Coincident apexes are situated at the intersecting
point of the axes. In this case the distance between
the cones is zero.
2.7.2 Parallel Generators
Parallel generators occur when the angles satisfy
α+β=γ. The minimum distance is then the distance
between the two generators. Tangency occurs when
the distance is zero, and intersection occurs when it
is negative.
2.7.3 Apex-to-Generator
For the case of Apex-to-Generator, the minimum
distance is from the apex to the nearest point on the
inner generator of the other cone. The appropriate
combination (A-apex to B-cone or B-apex to A-cone)
is determined by the specific geometry.
Tangency occurs when an apex is situated on the
inner generator of the other cone. Intersection occurs
when an apex is situated between the two generators
of the other cone.
3 ANALYSIS AND EXAMPLES
3.1 Verification
Verification of solution and implementation was
carried out in part by comparing the explicit solution
with the results of numerical minimization based on
the distance between two cone generators: (a) Initial
guess: the generator nearest to the other cone in the
plane defined by the axis and the vector between the
axes; (b) Variables of the problem: the rotation angle
of the generator around the axis for each of the
cones; (c). The three types of regions have known
explicit solutions for the distance between two given
generators. They are are Ray-to-Ray, Point-to-Ray,
and Point-to-Point; (d). The cost function for the
minimization is the distance between the two
generators.
The algorithm was implemented in Matlab®
using a general minimization function without
d
α
d
α
EXPLICIT SOLUTION FOR THE MINIMUM DISTANCE BETWEEN TWO SOLID SEMI-INFINITE CIRCULAR
CONES
157
gradient. The process converged to the value of the
explicit solution within the required error bound (in
most of the region). It did, however, take longer by
four orders of magnitudes.
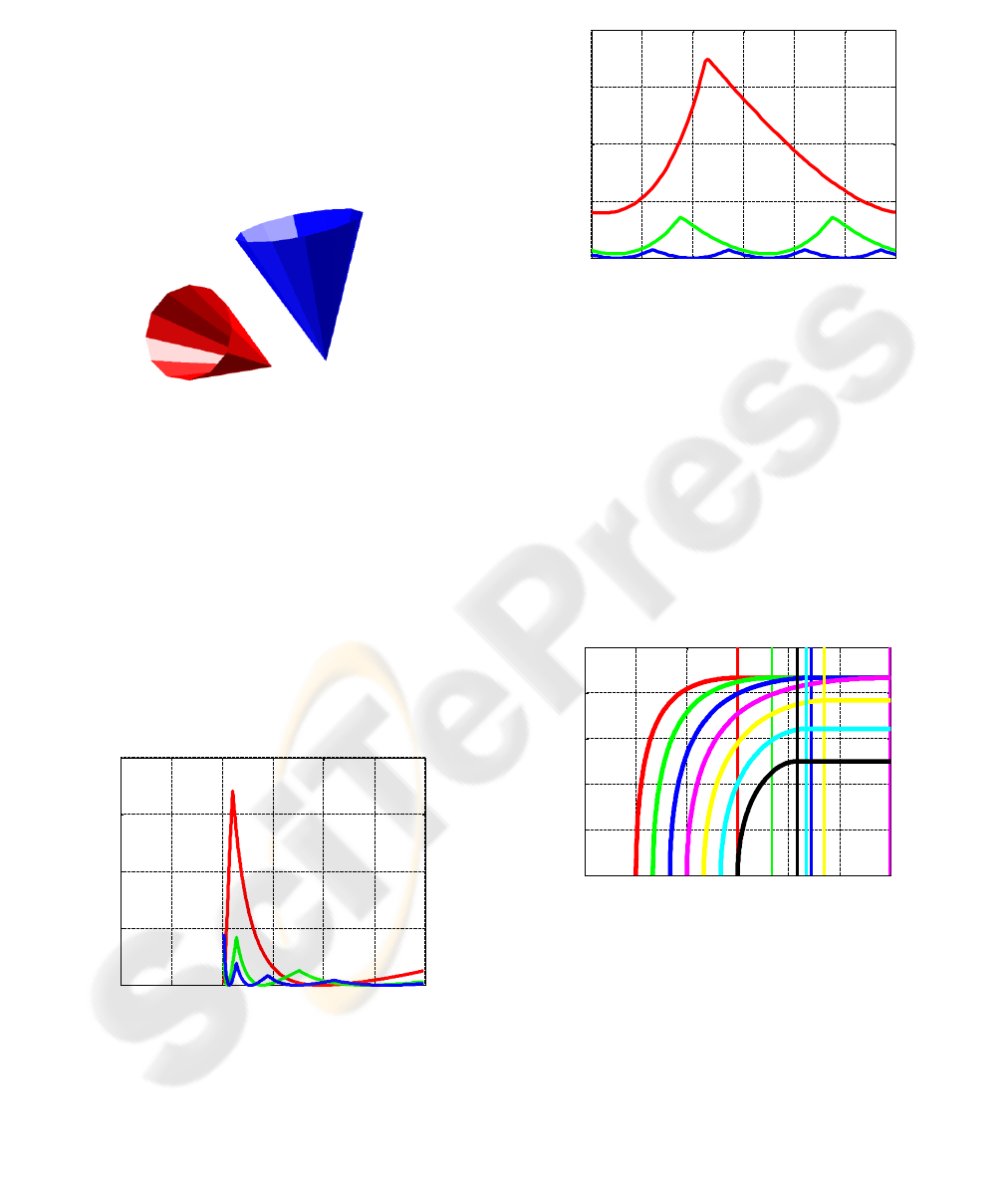
3.2 Comparison to Polytopes
Cones can be approximated by circumscribed
regular polytopes (see Figure 5). For each polytope,
additional parameters of the problem are the number
of facets and the rotational positioning angle ω.
Figure 5: General view of two regular polytopes.
For non-intersecting axes, in the surface-to-
surface region the problem reduces to finding the
nearest pair of edges (one from each polytope). The
result is then compared to the explicit solution for
the cones. For simplification, the space metric was
scaled by the distance between the axes and the
apexes were set on the minimum vector between the
axes. The maximum possible distance for surface-to-
surface is then unity.
Figure 6 shows the approximation error versus
the axes positioning angle for various values of facet
numbers (color coded).
Figure 6: Approximation error vs axes angle.
Figure 7 shows the approximation error versus
the rotational positioning angle of the first polytope
for various values of facet numbers (color coded). In
both Figures 6 and 7, the rotation the second
polytope is ⅓ step where the step is 360° divided by
the number of facets.
Figure 7: Approximation error vs rotation angle.
3.3 Examples
The explicit expressions were used for several cases.
In all cases β was set to 30º. For simplification, the
space metric was scaled by the distance between the
axes and the apexes were set on the minimum vector
between the axes. The maximum possible distance
for surface-to-surface is then unity.
Figure 8 shows the minimum distance versus
positioning angle for various values of α (color-
coded).
Figure 8: Scaled minimum distance vs axes angle.
Figure 9 shows the distance along the A-axis
versus positioning angle for various values of α
(color-coded). In both Figures 8 and 9, the transition
to a constant value at the critical positioning angle
γ
crit
is marked with vertical lines with matching
colors. For α=0, A-cone is a straight line.
0 30 60 90 120 150 180
0
0.05
0.1
0.15
0.2
Gama [deg]
errDmin [-]
Beta=30
Alpha=30
N-facet = 6
N-facet = 12
N-facet = 18
ombo=1/3 step: errDmin vs Omega
0 10 20 30 40 50 60
0
0.05
0.1
0.15
0.2
Omega [deg]
errDmin [-]
Beta=30
Alpha=30
N-facet = 6
N-facet = 12
N-facet = 24
ombo=1/3 step: errDmin vs Omega
0 30 60 90 120 150 180
0
0.2
0.4
0.6
0.8
1
Scaled Minimum Distance vs Gama
Gama [deg]
Min.Dist. [-]
Alpha=
Beta=30
0
10
20
30
40
50
60
GRAPP 2010 - International Conference on Computer Graphics Theory and Applications
158

Figure 9: Intersection A-distance vs axes angle.
Figure 10 shows the minimum distance error due
to a parametric error of 10 in α. From observing the
shape and starting point of the minimum distance
(see Figure 8), it is obvious there is a region with an
indefinite error in the minimum distance (the cones
intersect in this region). It should be noted that the
solution itself is exact, and it is the parametric error
that is propagated into the minimum distance.
Figure 10: Scaled minimum distance error vs axes angle.
4 CONCLUSIONS
Explicit expressions were derived for the minimum
distance between two solid semi-infinite circular
cones. The derivation is based on geometric
reasoning and vector algebra. Special regions and
cases were identified and discussed. A numerical
method based on minimizing the distance between
two generators was used as part of the verification
process. The exact solution was compared to results
of approximation by regular polytopes. The explicit
solution is robust, independent of coordinate system
and invariant under rigid translation and rotation of
the setup.
Future work will extend the scope of the problem
to include shells of finite cones. Shells require a
solution for a cone with generator angle larger than
π/2. Finite cones enlarge the set of solution types to
include the bases of the cones (contours and
surfaces).
REFERENCES
Gilbert, E. G., Johnson, D.W. and Keerthi, S.S., 1988, “A
Fast Procedure for Computing the Distance Between
Complex Objects in Three-Dimensional Space,” IEEE
Journal of Robotics and Automation, Vol. 4, No. 2, pp.
193-203, April 1988.
Jovanoski, D., 2008, “The Gilbert–Johnson–Keerthi
(GJK) Algorithm,” Department of Computer Science
University of Salzburg, February 2008.
Manchem, S. and Mukund, R., 2009, “The Gilbert-
Johnson-Keerthi Algorithm,” Indian Institute of
Technology Guwahati, October 31, 2009.
Chung, K. and Wang, W., 1996, “Quick Collision
Detection of Polytopes in Virtual Environments,”
ACM Symposium on Virtual Reality Software and
Technology 1996, 1-4, July, 96, University of Hong
Kong, Hong Kong.
0 30 60 90 120 150 180
0
0.5
1
1.5
2
A-Dist vs Gama
Gama [deg]
A-Dist [-]
Alpha=
Beta=30
0
10
20
30
40
50
60
0 30 60 90 120 150 180
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Scaled Minimum Distance Error vs Gama
Gama [deg]
Min.Dist.Error [-]
Alpha=
Beta=30
Alpha Error=10
10
20
30
40
50
60
EXPLICIT SOLUTION FOR THE MINIMUM DISTANCE BETWEEN TWO SOLID SEMI-INFINITE CIRCULAR
CONES
159
