
A PERCEPTION MECHANISM FOR TWO-DIMENSIONAL
SHAPES IN THE VIRTUAL WORLD
Jae-Woo Park and Jong-Hee Park
Kyungpook Nat’l University, Daegu, South Korea
Keywords: Perception, Ontology, Recognition.
Abstract: Lifelike agent in the virtual world is an agent who is designed to be able to simulate the realistic human
behavior. Agents continuously repeat the process that includes perception, recognition, decision and
behavior in the virtual world. Through those processes, the agents store new information in their memory or
modify their knowledge if it is needed. This study mainly deals with the perception that is intermediate step
between image processing and recognition. In this study, you will see how the agents perceive shapes. And
you also will realize how it is possible to infer the part of shape that was partially hidden from the agent’s
vision.
1 INTRODUCTION
We need to implement some kind of functions such
as perception, recognition and behavior in order to
make a system that can operate like real human in
the virtual world, and we have to reorganize these
functions smoothly. The fact that sees through the
eye is natural process. However, if you analyze the
process of perception, you could see many things
that have been occurred progressively for a short
time. Image processing is the starting point of the
agent's recognition. It is called image processing
which convert an image to digital data. The
perception which generated by Image processing
using points, lines and colors of pixels is to identify
two-dimensional shape. The rule-base system is used
to divide the shapes that touch each other. It is also
used to infer the shapes which are partially hidden
by other shapes or are partially outside the visions of
agents. Main purpose of perception is to increase the
success rate of recognition. In chapter 3.1, we
explain how to model the agent’s vision. In chapter
3.2, we explain the perception’s primitive units such
as points, lines and colors of pixels. The chapter 3.3
explains the inference of shape. In chapter 4, we
introduce spatial relation of shapes which are
contacted each other. Final chapter presents
requirements for successful recognition.
2 RELATED WORK
2.1 Virtual World
The ultimate aim of the Virtual World project is to
develop an authentic simulated cosmos which
consists of an authentic cyber space (Park, 2000) and
Virtual Inhabitants (SeJin and Kim and Park, 2004).
The authentic cyber space is a virtual environment
governed by the various rules and principles in a
systematic and organic manner (Park, 2000). The
Virtual Inhabitant is a computer-controlled agent
who dwells in the authentic cyber space and
interacts with the user in a manner similar to the
interaction among typical humans (SeJin, 2007).
2.2 Agent Model
An agent is a computer system that is situated in
some environment, and that is capable of
autonomous action in this environment in order to
meet its design objectives (Wooldridge, 2002).
Believable agent is personality-rich autonomous
agent with powerful properties of characters from
the arts (Bryan Loyall, 1997). Lifelike agent(or
lifelike character)is an agent which is designed in
order to simulate the realistic human(or animal)
behavior. These two agent architectures have very
similar requirements such as personality, emotion
and sociality because their ultimate goal is to induce
381
Park J. and Park J. (2010).
A PERCEPTION MECHANISM FOR TWO-DIMENSIONAL SHAPES IN THE VIRTUAL WORLD.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
381-384
DOI: 10.5220/0002869803810384
Copyright
c
SciTePress

user's interest and retain it. In addition, both
believable agent and lifelike agent are designed for
multimedia entertainment applications such as
computer games, computer animations, and virtual
communities and multimedia pedagogical
applications such as intelligent tutoring systems, and
simulated training systems (SeJin, 2007).
3 AGENT’S PERCEPTION
METHOD FOR
TWO-DIMENSIONAL SHAPES
3.1 Modelling of Vision
The agent has limited range of vision and the
perceivable information depends on the distance
from the agent to the target object. For a target
object O
i
,
Scale(O
i
) = f(Distance, Vision) where
Distance denotes the distance between the agent and
O
i
and Vision denotes the visual capability of the
agent. Vision determines the distance within which
the agent can discern an object. The vision V
A
(t) of
agent A is modeled by a cone with its vertex at her
eyes as illustrated in Figure 1. Its dimension is
specified with three parameters, i.e., the angle θ,
length l and direction d. While the first two
parameters depend on her bodily conditions, the
direction changes to her decision. Specifically, V
A
(t)
= (θ(t
b
), l(t
b
), d(t
b
+t)) where t
b
denotes the time with
a time unit in which bodily conditions may change.
An object within the cone denoted by the shaded
area is considered as perceived by the agent. The
cone will disappear, i.e., θ or l = 0, if her eyes are
closed or impaired. The l may be extended with help
of a device like a telescope or microscope. While +l
denotes the range of a natural vision or vision
extended with a telescope, -l denotes the range of a
microscopic vision. A dotted line indicates an
extended vision in either way. The object size would
be perceived by the agent as multiplied by a factor
proportional to |l|/d in case of +l and d/|l| in case of -l.
(J. H. Park., 2004)
Figure 1: Scope of vision.
3.2 Primitive Units for Perception
When we put a great effort to get something into our
friend’s head, it is good to explain typical features of
the object. This study defines the features as
characteristic property. For example, if we describe
a snowman to our friend, the snowman’s
characteristic properties are both one circle above
another circle and its color is white. In this study, the
characteristic properties of the objects to define them
are type of shapes, their spatial relations and their
colors. Figure 2 shows an object came within vision
of agent. The inside of circular area represents vision
of an agent. Our image processing step converts an
image in the scope into lines and points. The rapidly
changing RGB values from the left image of Figure
2 are used to identify the boundary lines. The right
image of Figure 2 shows the identified boundary
lines.
Figure 2: Image processing for object.
The points at the junctions of edges and the lines
occurring by RGB difference between the pixels are
used as the primitive units for two-dimensional
perception. The connected status, angle and colors
are also used to determine the shape type. These
parameters allow us to judge whether an object is
regular shape or not. Figure 3 shows detailed
primitive shape’s information. In Figure 3, point a, b
and c show the points indicating a junction. The
rectangle 2Lv2 has a section between Junctions
point a to point c (a-b-c). The number next to a line
shows its Draw value indicating how many times
used it.
Figure 3: Detailed information of primitive shape.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
382
For example, Line-ad is used in the rectangle-2Lv2
only once, and the Line-bc is used twice in the
rectangle-2Lv2 and the rectangle-2Lv7, their Draw
value being one & two respectively. Two connecting
lines at the Connection point have an angle between
them, gauged by the trigonometric functions.
3.3 Inference of Shape
When an agent perceives a target object that is
partially blocked by other objects or partially out of
the vision, she would use inference to complete her
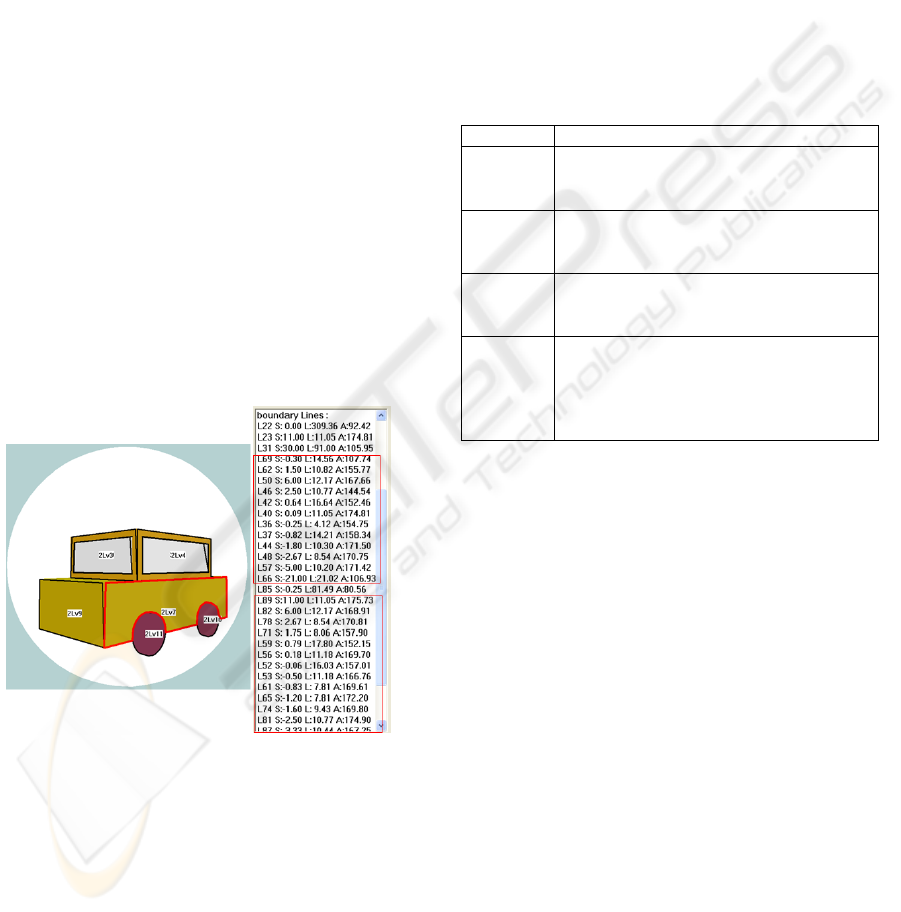
perception. Figure 4 shows the information on the
Boundary lines for the shape being inferred (red
boundary of ID: 2LV7 shape). In the information,
we can find two sections (the red rectangle) on the
rapidly changing line’s length (L) and line’s angle
(A). The agent reforms her inferring only when the
target shape is not a regular shape, and its available
amount of information is to exceed minimum. An
agent excludes those rapidly changing parts and
starts her inferring with the rest of the information
on the image to find its closed regular shapes. And
the agent draws virtual lines starting from Junction
points. If it is judged to be a regular shape based on
the virtual lines, she adds the information on the
virtual lines to her original information.
Figure 4: Inferable shape and its Boundary Lines.
4 SPATIAL RELATIONS AMONG
SHAPES
With the shape type identified before, we now
identify the spatial relations existent among those
shapes to achieve a complete recognition. Defined
spatial relation in perception is different with the
recognition’s relation. The spatial relations as
perceived could be specialized into to diverse spatial
relations in recognition. We’ll follow the relations
set of HSR for our recognition (Choe and Park 2005).
For example, relations of HSR include among others
associated with ‘Touch’ in perception, ‘straddling’,
‘hanging’, ‘leaning’. In short, the relations of
perception are redefined again.
4.1 Connection among Shapes
If there is a connection among shapes, shape-A
based relation of shape-B is expressed in the
database on the ontology.
Table 1: Types of Connection.
Connection Defined rule
In The case when central point of B insides
boundaries of A. Only, The inference of A
does not occur by B
Out The case when central point of B outside
boundaries of A. Only, The inference of A
does not occur by B
Touch The case when B and A have shared lines
of the above one. Only, The inference does
not occur by shared lines.
Behind The case when B and A have shared lines
of the above one. And the inference occurs
by shared lines. In this case, The
connection of shape A is Touch and shape
B’ connection is Behind
The Out relation occurs only when the Out Touch
has been found. We mention only because there are
numerous Out relations including the Out touch.
From Table 1, the central point of shapes, shape’s
boundaries and their inference are determinant of
connection between them. These connections are
designed in the ontology and are stored in database.
When there are some additional connections (i.e.
repetition, symmetry and reverse etc.), this data
structure can be used to solve the problem by adding
proper rules in the ontology.
4.2 Direction among Shapes
The Direction is another parameter to special the
spatial relations. The Direction uses a shape’s
central point as the reference. For example, ‘direct3
out touch', means a shape has an Out relation on the
3:00 direction with another shape. Figure 5 shows
the coordinate for area. Central circle is called
Center relation. Other Coordinates proceed in order
clockwise. Various spatial relations could be defined
indicates by combining Connection and Direction.
A PERCEPTION MECHANISM FOR TWO-DIMENSIONAL SHAPES IN THE VIRTUAL WORLD
383

Figure 5: The Direction among shapes.
5 CONCLUSIONS
In this study, we introduce a perception mechanism
for the shapes that touch each other. We also
introduce the inference of shape and the spatial
relations among the component shapes of a
composite shape for recognizing objects in the
knowledge schema. The virtual world in general is
composed with regular shape. So, applying the
introduced methods to the virtual world is not so
difficult. However, in order to apply this technology
to a realistic virtual world, we need to implement the
superior image computing ability and to define
abstraction for a lot of objects. From now on, the
study on the perception mechanism will be focused
the irregular shape expressions and additional
relations among shapes.
REFERENCE
Park, J., 2000. “A platform for multimedia simulation of
spatio-temporal situations for declarative knowledge
learning”. AIMM Laboratory, Kyungpook National
University, Daegu, Korea, Tech. Rep.
Patrick, H, Winston. 1993. “Artificial intelligence”.
Addison-Wesley Publishing Company. pp. 81-94.,
Addison Wesley., 3
nd
edition.
Park, J., 2004. “space”. AIMM Laboratory, Kyungpook
National University, Daegu, South Korea, Tech. Rep
14 p.10
SeJin, J., Kim, B., Park, J., 2004. “An agent architecture
for implementing a virtual Inhabitant”. In 10
th
Multimedia Modeling Conference, pp.316-322.
Bryan Loyall, A. 1997. “Believable agents: Building
interactive personalities”. Ph.D. dissertation Carnegie
Mellon University, Pittsburgh, PA,
Wooldridge, M., 2002. “An Introduction to Multi Agent
Systems”. John Wiley & Sons, Chichester, UK,
SeJin, J., 2007. “A Knowledge Model for Simulating
Human-like Behavior of Virtual Inhabitant”. Ph.D.
dissertation Kyungpook National University, Daegu,
South Korea
Park , J., 2000. “A logical simulation of spatio temporal
situations”, AIMM Laboratory, Kyungpook National
University, Daegu, Korea, Tech. Rep.,
S. H. Choe., J. H. Park, J., 2005. “Hierarchical spatial
relation based on a contiguity graph”. International
Journal of Intelligent Systems Vol.20, No. 9, pp867-
892
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
384
