
FORMATION CONTROL BETWEEN A HUMAN AND A MOBILE
ROBOT BASED ON STEREO VISION
Fl
´
avio Garcia Pereira, Marino Frank Cypriano and Raquel Frizera Vassallo
Department of Electrical Engineering, Federal University of Esp
´
ırito Santo
Av. Fernando Ferrari, 514, Goiabeiras, Vit
´
oria-ES, CEP 29075-910, Brazil
Keywords:
Formation control, Stereo vision.
Abstract:
This paper presents a reactive nonlinear formation control between a human and a mobile robot based on stereo
vision. The human, who is considered the leader of the formation, is positioned behind the robot and moves
around the environment while the robot executes movements according to human movements. The robot has
a stereo vision system mounted on it and the images acquired by this system are used to detect the human
face and estimate its 3D coordinates. These coordinates are used to determine the relative pose between the
human and robot, which is sent to the controller in order to allow the robot to achieve and keep a desired
formation with the human. Experimental results were performed with a human and a mobile robot, the leader
and follower respectively, to show the performance of the control system. In this paper a load was put on a
mobile robot in which the nonlinear controller was applied, allowing the transportation of this load from a
initial point to a desired position. In order to verify the proposed method some experiments were performed
and shown in this paper.
1 INTRODUCTION
Navigating and following are the two basic function-
alities of mobile robots. Both of them are widely
studied topics. Many strategies have been developed
for several kinds of environments either with a sin-
gle agent systems or multi-agent systems (Bicho and
Monteiro, 2003; Das et al., 2002; Egerstedt and Hu,
2001; Egerstedt et al., 2001; Jadbabaie et al., 2002;
Vidal et al., 2003).
In most of these studies the robots are used to nav-
igate in order to reach a specific goal point in a given
environment while avoiding obstacles (Althaus et al.,
2004). However, due to limitations in sensing, most
times, robots are not able to operate in complex en-
vironments, even if they are provided with accurate
sensors like a 3D range finder. Therefore, we believe
that a human-robot navigation system is a good solu-
tion for this kind of problem, since human can lead
the robot in a cooperative task.
The motivation for the work presented in this pa-
per comes from situations where robots are used to
help people in an object transportation task where the
person does not load the object, only guides the robot
through the environment.
A new issue for navigation emerges from interac-
tion tasks, which concerns the control of the plat-
form (Althaus et al., 2004). The main idea is that the
robot’s behavior must be smooth and similar to the
human’s movements.
In human-robot interaction the actions of the robot
depend on the presence of humans and their wish to
interact.
In (Bowling and Olson, 2009) a human-robot team
is composed by two omnidirectional robots and one
human. The authors consider the case in wich a hu-
man turns abruptly a corner and the robots may keep
the human in their line of sight. The strategy is ac-
complished by taking the center of mass of the for-
mation and analyzing its rotation.
The work proposed in this paper consists in coor-
dinating the movements of a mobile robot by a human
in order to transport a load from a desired point to an-
other one in a safe way. In this system, the human,
which is considered the formation leader, is responsi-
ble for guiding the robot through the environment by
making the load transportation from an initial point to
a goal position and orientation. The robot (follower)
must move according to the human maitaining the for-
mation. This type of cooperative work needs the robot
to acquire enough information about the human posi-
tion to achieve the goal. This is reached through a
135
Garcia Pereira F., Frank Cypriano M. and Frizera Vassallo R. (2010).
FORMATION CONTROL BETWEEN A HUMAN AND A MOBILE ROBOT BASED ON STEREO VISION.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 135-140
DOI: 10.5220/0002880601350140
Copyright
c
SciTePress

vision-based nonlinear controller which estimates the
linear and angular velocities that the robot must exe-
cute to follow the human. This application is useful
because as the load is on the robot, the human does
not need to carry the object with it. The human func-
tion is to guide the robot through the environment.
Unlike the conventional leader-follower coopera-
tion, where commonly the formation leader is posi-
tioned in front of the follower(s), the formation con-
trol proposed in this work takes into consideration the
fact that the robot navigates in front of the human,
which is considered the leader of the formation. As
the formation control is based on vision, a stereo vi-
sion system is mounted on top of the robot pointing
backwards, which allows the robot to navigate “look-
ing” at the human face, instead of “looking” at the
back of the human. Another interesting point of this
formation is the fact that, since the robot goes in front
of the human (leader), the personn can observe the
robot behavior during the cooperation task and, in ad-
dition, can notice the presence of obstacles and guide
the robot in order to avoid them. This is something
valuable because we focused on the cooperation prob-
lem and still did not include an obstacle avoidance
algorithm to the robot behavior. That is one of our
issues for future work.
This paper is organized as follows. The technique
for estimating the face pose is briefly discussed in
Section 2 and the formation controller as its stability
analysis are shown in Section 3. Some experimental
results are given in Section 4 and, finally, the conclu-
sions and future work are commented in Section 5.
2 HUMAN DETECTION
The nonlinear controller that will be presented in Sec-
tion 3 needs the distance from the human to the robot
(d) and the angle between the vector which links the
human position with the center of the robot (θ). In
order to estimate these two variables, it is used a cali-
brated stereo vision system attached to the robot. The
human pose is estimated by detecting the face in both
images captured by the vision system and, afterwards,
recovering its 3D coordinates.
The face detection is performed with the algo-
rithm proposed in (Viola and Jones, 2001), which
utilizes several images to train a detection algorithm
based on Adaboost. After detecting the face in both
images, an algorithm to detect some facial character-
istics is applied and the coordinates of these points in
the image plane are determined. Knowing the posi-
tions of these points in both images, their 3D coordi-
nates can be recovered. These facial features are, for
instance, the eyes, nose and mouth. Figures 1 (a) and
1 (b) show the images captured by the stereo vision
system and the detected facial features.
(a) (b)
Figure 1: Images captured by the stereo vision system.
The face coordinates is considered as being the av-
erage of the facial features coordinates, i. e.,
[X,Y, Z] =
1
N
N
∑
i=1
[x
i
, y
i
, z
i
], (1)
where N is the number of detected features and
[x
i
, y
i
, z
i
], are the 3D coordinates of each detected fa-
cial feature in the vision system reference frame at-
tached to the robot. Figure 2 illustrates the robot and
the stereo vision system reference frames.
Xc
Zc
Yc
Zr
Yr
Xr
Camera
Reference Frame
Robot
Reference Frame
Figure 2: Robot and vision system reference frames.
The relation between these coordinate frames is
given by a rotation of 180
◦
around the x-axis and a
translation of 1.2m in the y-axis. Thus,
R
f
= T
y
(1.2)R
x
(180)C
f
(2)
where R
f
and C
f
are respectively the coordinates in
the robot reference frame and in the camera reference
frame.
After estimating the 3D coordinates of the face,
the variables d and θ are calculated on the vision sys-
tem’s XZ-plane (ground plane). Figure 3 shows the
human and the vision system positions in the XZ-
plane.
The values of d and θ, that define the distance and
the angle between the human and the robot, are deter-
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
136

x
z
Person
q
d
(0, 0, 0)
Vision System
(X, Y, Z)
Figure 3: Human and vision system position in the XZ-
plane.
mined as
d =
√
X
2
+ Z
2
θ = atan
X
Z
,
(3)
where X and Z are, respectively the x and z coor-
dinates of the face. Notice that, however d and θ
where calculated in the camera frame, they are valid
in the robot frame, due to the aligment between the
two frames.
3 CONTROLLER
The aim of the proposed controller is to keep the robot
with a desired distance and orientation to the human
partner in order to accomplish a specific task. That
is done by using the information obtained from the
pair of images provided by the stereo vision system
assembled on the robot.
Figure 4 illustrates a mobile robot with a stereo
vision system attached to it and one person behind
it. Considering this case, the kinematic equations that
describe the robot movement with respect to the per-
son are given by
˙
d = v
h
−v
r
cos(θ)
˙
θ = ω +
v
r
sin(θ)
d
+
v
h
sin(
˜
θ)
d
,
(4)
where v
r
and ω are, respectively, the robot linear and
angular velocities, v
h
is the human velocity, d is the
distance between the person and the vision system
while θ is the angle of the human face according to
the stereo vision system frame and
˜
θ is the angular
error.
The values of d and θ are obtained from the 3D
coordinates of the middle of the face after 3D recon-
struction. The way to obtain these values was ex-
plained in Section 2.
After determining d and θ, the distance and orien-
tation errors (
˜
d,
˜
θ) are calculated as
Stereo Vision
System
w
v
r
v
h
q
d
Person
Figure 4: Relative position between the robot and the per-
son.
˜
d = d
d
−d
˜
θ = θ
d
−θ,
(5)
where d
d
and θ
d
are respectively the desired distance
and orientation that the robot has to keep from the
human.
For the presented system, it is proposed a nonlin-
ear controller in order to accomplish the objective of
control, i. e, to keep the robot following the human
with specified distance and orientation. For this con-
troller, the linear and angular velocities are
v
r
=
1
cos(θ)
v
h
−k
d
tanh(
˜
d)
ω = k
θ
tanh(
˜
θ) −v
r
sin(θ)
d
−v
h
sin(
˜
θ)
d
,
(6)
with k
d
, k
θ
> 0.
The control structure used in this work appears in
Figure 5. The operations of detecting faces and facial
features, recovering the 3D coordinates and determin-
ing the values of d and θ, are executed by the “Image
Processing” block.
Control Robot
w
v
r
v
h
Image
Processing
d
q
d
d
q
d
Figure 5: Control structure.
3.1 Stability Analysis
For the nonlinear controller proposed in (6) the fol-
lowing candidate Lyapunov function is taken to check
the system stability
V (
˜
d,
˜
θ) =
1
2
˜
d
2
+
1
2
˜
θ
2
, (7)
FORMATION CONTROL BETWEEN A HUMAN AND A MOBILE ROBOT BASED ON STEREO VISION
137

which is positive semi-defined and has the following
time-derivative function
˙
V (
˜
d,
˜
θ) =
˜
d
˙
˜
d +
˜
θ
˙
˜
θ. (8)
Thus, differentiating (5) with respect to time and
replacing the result in (8) we will have
˙
V (
˜
d,
˜
θ) = −
˜
d
˙
d −
˜
θ
˙
θ. (9)
Now, the values of
˙
d and
˙
θ in (9) are substituted
by the respective values from (4). Then we have
˙
V (
˜
d,
˜
θ) = −
˜
d[v
h
−v
r
cos(θ)]−
˜
θ
ω+
v
r
sin(θ)
d
+
v
h
sin(
˜
θ)
d
.
(10)
Replacing the control actions proposed (6) in (10),
the time-derivative of the Lyapunov function is rewrit-
ten as
˙
V (
˜
d,
˜
θ) = −k
d
tanh(
˜
d)
˜
d −k
θ
tanh(
˜
θ)
˜
θ. (11)
As mentioned k
d
and k
θ
are positive, and func-
tions like x.tanh(x) ≥ 0 ∀ x. So, (8) is negative semi-
defined, which means the asymptotic stability of the
proposed nonlinear controller, i. e.,
˜
d,
˜
θ → 0 when
t → ∞.
Notice that to estimate the angular velocity it is
necessary to know the human velocity, v
h
. This ve-
locity can be estimated as
v
h
≈
d(t) −d(t −1)
∆t
−v
r
cos(
˜
θ). (12)
4 EXPERIMENTAL RESULTS
In order to prove the reliability of the proposed
method, some experiments were performed and two
of them will be shown in this section. These exper-
iments were performed with a mobile robot Pioneer
3AT from ActivMedia Robotics, a stereo vision sys-
tem built with two USB web cameras, which provide
images with 320x240 pixels. The control system is
written in C++ and each control loop is executed in
250ms. The robot with the stereo vision system used
to perform the experiments can be seen in Figure 6.
4.1 Experiment 1
In this experiment, the human leads the robot from
the initial position, which has coordinates (X , Z) =
(0m, 0m) to the coordinates (X, Z) = (3m, −5m)
through a “S-like” path. The trajectory described by
the robot can be seen in Figure 7.
The linear and angular velocities performed by the
robot are shown, respectively, in Figures 8 (a) and (b).
Figure 6: Robot used to perform the experiments.
−1 0 1 2 3 4
−4
−3
−2
−1
0
Trajectory Described by the Robot
x [m]
y [m]
Figure 7: Experiment 01: Trajectory described by the robot.
The continuous line represents the velocities calcu-
lated by the controller and the velocities performed
by the robot are plotted as dashed line.
In Section 3.1 the control system stability was
demonstrated, i. e., it was proved that the system er-
rors tend to zero when the time grows and if the hu-
man stops at some place. In order to illustrate this,
the graphics shown in Figure 9 present the errors dur-
ing the experiment. Figure 9 (a) shows the distance
error during the experiment while the angular error is
presented in Figure 9 (b).
By observing Figure 7 it is possible to see that
the robot reached the goal describing desired trajec-
tory. Moreover, as can be seen in Figure 9, both the
distance error and the orientation error tend to zero,
which means the robot accomplished the task. For
the next experiments, the errors will not be shown.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
138
0 20 40 60 80 100 120
−50
0
50
100
150
Linear Velocity
t [s]
v [mm/s]
Calculated
Performed
(a)
0 20 40 60 80 100 120
−15
−10
−5
0
5
10
Angular Velocity
t [s]
w [deg/s]
Calculated
Performed
(b)
Figure 8: Experiment 01: Velocities performed by the
robot. Linear (a) and Angular (b).
0 20 40 60 80 100 120
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Distance Error
t [s]
error [m]
(a)
0 20 40 60 80 100 120
−60
−40
−20
0
20
40
Angular Error
t [s]
error [deg]
(b)
Figure 9: Experiment 01: Distance error (a) and Angular
error (b).
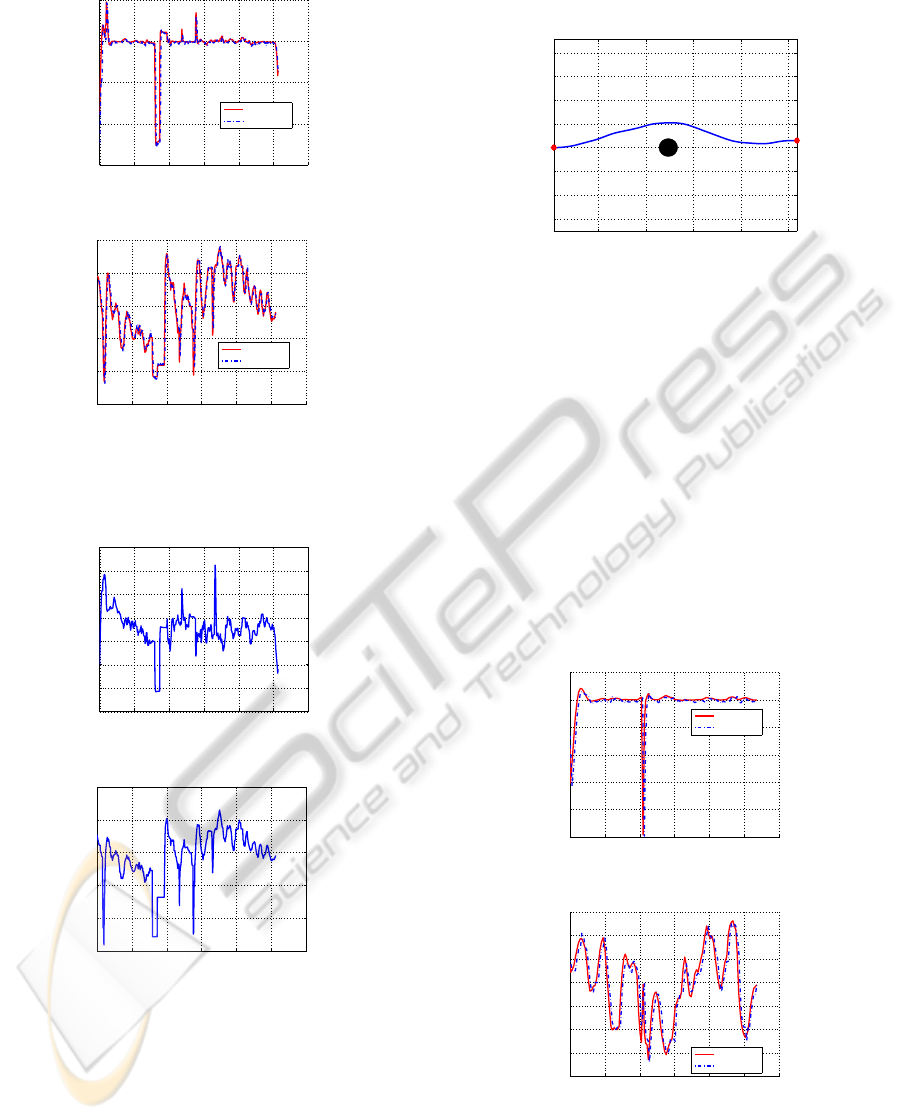
4.2 Experiment 2
In this experiment the human should guide the robot
from the initial position (X , Y ) = (0m, 0m) to the fi-
nal coordinates (X, Y ) = (5m, 0m). However, there
was a circular obstacle with diameter equal to 0.4m.
The trajectory described by the robot during the exe-
cution of this task is shown in Figure 10.
1 2 3 4 5
−1.5
−1
−0.5
0
0.5
1
1.5
2
Trajectory Described by the Robot
x [m]
y [m]
Figure 10: Experiment 02: Trajectory described by the
robot.
It is important to mention that the robot does not
have an obstacle avoidance algorithm. So, the devia-
tion that can be seen in Figure 10 occurred due to the
human action, i. e., the person who leads the robot no-
ticed an object in the middle of the desired trajectory
and guided the robot in order to deviate from it. Even
though it seems that the person has to walk in an un-
natural way in order to prevent the robot from crash-
ing into obstacles or corner in a hallway, this problem
will be solved by adding an obstacle avoiding strategy
such as in (Chuy et al., 2007; Pereira, 2006).
The linear velocity is shown in Figure 11 (a) while
the angular velocity appears in Figure 11 (b).
0 10 20 30 40 50 60
0
20
40
60
80
100
120
Linear Velocity
t [s]
v [mm/s]
Calculated
Performed
(a)
0 10 20 30 40 50 60
−8
−6
−4
−2
0
2
4
6
Angular Velocity
t [s]
w [deg/s]
Calculated
Performed
(b)
Figure 11: Experiment 02: Velocities performed by the
robot. Linear (a) and Angular (b).
Notice that around the 20th second of the experi-
FORMATION CONTROL BETWEEN A HUMAN AND A MOBILE ROBOT BASED ON STEREO VISION
139

ment, both linear and angular velocities calculated by
the controller are equal to zero. This happened be-
cause in this instant, the robot lost the information
about the person for, at least, one of the cameras of
the stereo vision system. This behavior was adopted
in order to avoid having the robot be out of control ev-
ery time the vision system loses the information about
the human. Thus, whenever the robot loses the infor-
mation about its leader, it stops and waits for a new
face detection.
Although an obstacle in the middle of the desired
trajectory, the human managed to guide the robot to
avoid this object and reach the desired point.
5 CONCLUSIONS AND FUTURE
WORK
This paper presented an approach to a formation con-
trol between a human and a mobile robot using stereo
vision. The strategy uses the recognition method pre-
sented by (Viola and Jones, 2001) in order to find the
facial features needed to estimate the human position.
A stable nonlinear controller is proposed to allow the
robot to perform the task in cooperation with a hu-
man. The effectiveness of the proposed method is
verified through experiments where a human guides
the robot from an initial position to a desired point,
when the human moves either forward or backwards.
Our future work is concerned in improving the
features detection in order to better estimate the hu-
man position and orientation. Besides, we also intend
to introduce a second robot to the formation. Thus,
the robots will be able to carry a bigger and heavier
load.
REFERENCES
Althaus, P., Ishiguro, H., Kanda, T., Miyashita, T., and
Christensen, H. (2004). Navigation for human-robot
interaction tasks. In ICRA ’04. 2004 IEEE Interna-
tional Conference on Robotics and Automation, 2004.
Proceedings., volume 2, pages 1894–1900 Vol.2.
Bicho, E. and Monteiro, S. (2003). Formation control for
multiple mobile robots: a non-linear attractor dynam-
ics approach. In Intelligent Robots and Systems, 2003.
(IROS 2003). Proceedings. 2003 IEEE/RSJ Interna-
tional Conference on, volume 2, pages 2016–2022
vol.2.
Bowling, A. and Olson, E. (2009). Human-robot team dy-
namic performance in assisted living environments.
In PETRA ’09: Proceedings of the 2nd International
Conference on PErvsive Technologies Related to As-
sistive Environments, pages 1–6, New York, NY, USA.
ACM.
Chuy, O., Hirata, Y., and Kosuge, K. (2007). Environment
feedback for robotic walking support system control.
In ICRA, pages 3633–3638.
Das, A., Fierro, R., Kumar, V., Ostrowski, J., Spletzer,
J., and Taylor, C. (2002). A vision-based formation
control framework. Robotics and Automation, IEEE
Transactions on, 18(5):813–825.
Egerstedt, M. and Hu, X. (2001). Formation constrained
multi-agent control. In Robotics and Automation,
2001. Proceedings 2001 ICRA. IEEE International
Conference on, volume 4, pages 3961–3966 vol.4.
Egerstedt, M., Hu, X., and Stotsky, A. (2001). Control of
mobile platforms using a virtual vehicle approach. Au-
tomatic Control, IEEE Transactions on, 46(11):1777–
1782.
Jadbabaie, A., Lin, J., and Morse, A. (2002). Coordination
of groups of mobile autonomous agents using nearest
neighbor rules. In Decision and Control, 2002, Pro-
ceedings of the 41st IEEE Conference on, volume 3,
pages 2953–2958 vol.3.
Pereira, F. G. (2006). Navegac¸
˜
ao e desvio de obst
´
aculos us-
ando um rob
ˆ
o m
´
ovel dotado de sensor de varredura
laser. Master’s thesis, Universidade Federal do
Esp
´
ırito Santo - UFES.
Vidal, R., Shakernia, O., and Sastry, S. (2003). Formation
control of nonholonomic mobile robots with omnidi-
rectional visual servoing and motion segmentation. In
Robotics and Automation, 2003. Proceedings. ICRA
’03. IEEE International Conference on, volume 1,
pages 584–589 vol.1.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. Proceed-
ings of the 2001 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2001.
CVPR 2001., 1:I–511–I–518 vol.1.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
140
